
Abstract
In this paper, studies on the synchronization of fractional-order Takagi–Sugeno (T-S) fuzzy neural networks are performed. By employing a linear matrix inequality and constructing a skillful Lyapunov function, sufficient conditions are derived to guarantee that the master system synchronizes the slave system. Finally, an example and its simulations are presented to demonstrate the feasibility of the synchronization scheme.
Similar content being viewed by others


1 Introduction
Neural networks are playing a more and more important role in the reconstruction of images, signal processing, optimization problems, artificial intelligence, etc. However, neural networks can arise chaotic behaviors due to an unpredictable disturbance. To control the chaos arising in the neural networks, a variety of synchronization schemes have been proposed, including projective synchronization [22], event-based synchronization [13], exponential synchronization [8, 15], finite-time synchronization [29, 36], generalized synchronization [2, 10], pinning synchronization [9, 31], lag synchronization [26, 32], adaptive synchronization [3, 11, 18, 24, 27, 36], impulsive synchronization [14, 17, 28, 30, 31], and so on. Recently, another important topic is the fractional calculus, which depicts arbitrary non-integer-order differentiation and integration. The fractional-order neural networks have been proposed in theory and practice due to the great significance of the fractional calculus. Stability analysis of a fractional-order system with impulses was performed in [21]. Synchronization schemes were proposed for the fractional-order neural networks with delays (see, e.g., [33, 35]). Memristor-based fractional-order cellular neural networks were studied in [7, 20].
Fuzzy logic theory is a powerful tool to deal with synthesis of integer-order complex systems (see [4,5,6, 23, 25, 38]). However, they have not considered the effects of fuzzy logic on the fractional-order neural networks. There are few papers considering the stability and synchronization of Takagi–Sugeno (T-S) fuzzy neural networks. Recently, state estimation was given for T-S fuzzy delayed Hopfield neural networks in [1]. Adaptive fuzzy sliding mode control scheme was proposed for the uncertain fractional-order chaotic systems [16]. Finite stability analysis was performed for a memristor-based fractional-order fuzzy cellular neural networks in [37]. In [19], impulsive synchronization was proposed for fractional T-S fuzzy networks by utilizing the comparison principle. In [22], the authors studied the adaptive projective synchronization for fractional-order T-S fuzzy neural networks with uncertain parameters. In the previous works, they considered the projective synchronization and the impulsive synchronization of fractional-order T-S fuzzy neural networks. However, different from their consideration and method, we construct a different Lyapunov function and employ the linear matrix inequality. Some sufficient conditions are obtained to guarantee the master–slave synchronization of fractional-order T-S neural networks. This is the highlight of this paper.
This paper is organized as follows. Definitions and lemmas are presented in the next section. Section 3 is devoted to obtaining the sufficient conditions for synchronization of fractional-order neural networks. Finally, an example and its simulations are given.
2 Preliminaries
In this section, the assumptions, definitions, and some lemmas are given. Two definitions of the Caputo fractional-order integrals and derivatives are introduced.
Definition 2.1
For a function \(x(t)\) and non-integer real number \(\alpha>0\), the Caputo fractional integral is defined as
where the gamma function \(\varGamma(\cdot)\) satisfies \(\varGamma(s)=\int _{0}^{\infty} t^{s-1}e^{-t}\,dt\), \(t_{0}\) is the initial time, \(t\geq t_{0}\).
Definition 2.2
For a function \(x(t)\) and non-integer real number \(\alpha>0\), the Caputo fractional derivative is defined as
where \(t_{0}\) is the initial time, \(t\geq t_{0}\), \(n-1 < \alpha<n \in Z^{+}\).
We need the following lemmas.
Lemma 2.1
([12])
For the Caputo fractional-order derivative, when \(n-1 < \alpha<n, n \in N^{+}\), we have
In particular, when \(0< \alpha<1\),
Lemma 2.2
([1])
For any matrices \(X\in R^{ m\times n}\), \(Y\in R^{ m\times n}\), \(\varLambda =\varLambda^{T}>0\), \(\varLambda\in R^{n \times n}\), the inequality \(X^{T}Y+Y^{T}X \leq X^{T}\varLambda X+Y^{T}\varLambda^{-1}Y\) holds.
Lemma 2.3
([34])
Given constant matrices \(\varXi_{1}\), \(\varXi_{2}\), \(\varXi_{3}\), where \(\varXi _{1}=\varXi_{1}^{T}\), \(\varXi_{2}=\varXi_{2}^{T}\), and \(\varXi_{2}>0\), then \(\varXi _{1}+\varXi_{3}^{T}\varXi_{2}^{-1}\varXi_{3}<0\) if and only if
3 Model formulations and synchronization schemes
In this section, we discuss the master–slave synchronization of fractional-order T-S fuzzy delayed neural networks. The aim is to achieve the synchronization of the T-S fuzzy master–slave systems by using a state feedback controller. Consider a vector form of the neural network as follows:
If we take (1) as the master system, the corresponding slave system can be given as
where \(x(t)=[u_{1}(t),\ldots,u_{n}(t)]^{T}\in R^{n}\) is the state vector, \(v(t)=[v_{1}(t),\ldots,v_{n}(t)]^{T}\in R^{n}\) is the output vector, \(C=\operatorname{diag}(-c_{1},\ldots,-c_{n})\) (\(c_{k}>0\), \(k=1,\ldots,n\)) is the self-feedback matrix, \(U(t)\) is a suitable controller, A and B \(\in R^{n\times n}\), \(I(t)=[\xi_{1}(t),\xi_{2}(t),\ldots,\xi _{n}(t)]^{T}\in R^{n}\) is the external input vector, \(f(x(t))=[f_{1}(u_{1}(t)),\ldots,f_{n}(u_{n}(t))]^{T}\) and \(g(u(t-\tau ))=[g_{1}(u_{1}(t-\tau)),\ldots,g_{n}(u_{n}(t-\tau))]^{T}\) denotes the output vector at time t and \(t-\tau\), respectively.
Motivated by [1], we define the fuzzy rule k as follows:
IF \(\omega_{1}\) is \(\mu_{k1}\) and ⋯ \(\omega_{s}\) is \(\mu_{ks}\), THEN
The meaning of parameters \(\omega_{k},\mu_{kq}\) (\(k=1,2,\ldots ,r\), \(q=1,2,\ldots,s\)), r is the same as in [1]. Using a standard fuzzy inference method, we have from (3)–(4) that
where \(h_{k}(\omega)=\frac{\omega_{k}(\omega)}{\sum_{k=1}^{s}\omega_{k}(\omega)}\) satisfies
Throughout this paper, we make the following assumption.
Assumption 3.1
The neuron activation functions \(f_{j}(x)\) and \(g_{j}(x)\) satisfy the following Lipschitz conditions:
and
for all \(x,y \in\mathbb{R}\), where \(l_{j}>0\), \(h_{j}>0\) are Lipschitz constants.
Let \(e(t)=v(t)-u(t)\) be the synchronization error, select the control input function
where \(\varPhi=\operatorname{diag}(\phi_{1},\phi_{2}, \ldots,\phi_{n})\) is the controller feedback matrix.
Then we can obtain the error system as follows:
Theorem 3.1
If there exist positive definite matrices \(P, Q, R, S\), and V such that
for all k (\(k=1,2,\ldots,r\)), where \(\varPsi=(C_{k}-\varPhi)^{T}P+P(C_{k}-\varPhi )+L+\tau Q+R+S\), \(L=\operatorname{diag}\{l_{1}^{2},l_{2}^{2},\ldots,l_{n}^{2}\}\), \(H=\operatorname{diag}\{h_{1}^{2},h_{2}^{2},\ldots,h_{n}^{2}\}\), E is an identity matrix, then the fractional-order T-S fuzzy system (5) synchronizes to system (6).
Proof
We define the following Lyapunov function:
where
Calculation on the derivative along (9) leads to
In view of Lemma 2.2, we obtain
and
where \(L=\operatorname{diag}\{l_{1}^{2},l_{2}^{2},\ldots,l_{n}^{2}\}\), \(H=\operatorname{diag}\{ h_{1}^{2},h_{2}^{2},\ldots,h_{n}^{2}\}\). Thus, we have
By using the inequality
we have
Thus,
where
Note that, by Lemma 2.3, the matrix inequality
implies that the following inequality holds:
Therefore,
This implies that the fractional-order T-S fuzzy neuron system (5) synchronizes to system (6). □
Remark 3.1
We construct a skillful Lyapunov function with the Caputo fractional-order integral, definite integral, and double integral in the proof of Theorem 3.1.
4 Numerical example
In this section, as an example, we consider a fractional-order T-S fuzzy delayed neural networks with two neurons.
Fuzzy Rule 1
IF \(\omega_{1}\) is \(\mu_{11}\) and ⋯ \(\omega_{s}\) is \(\mu_{1s}\), THEN
Fuzzy Rule 2
IF \(\omega_{1}\) is \(\mu_{21}\) and ⋯ \(\omega_{s}\) is \(\mu_{2s}\), THEN
Using a standard fuzzy inference method, system (12)–(13) is inferred as follows:
with \(r=2\),
Correspondingly,
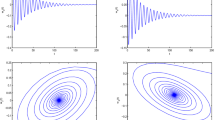
Taking \(h_{1}(\omega)=\sin^{2}(10 \tanh\frac{\pi(t+2)}{2})\), \(h_{2}(\omega )=\cos^{2}(10 \tanh\frac{\pi(t+2)}{2})\). Select \(\tau=1\), \(\alpha =0.9\), and the initial conditions of \(u(t)\) and \(v(t)\)
Based on these parameters, we obtain the solution of the linear matrix inequality (10) by using Matlab LMI toolbox:
Obviously, P, Q, R, S, and V are positive definite matrices. The simulation results for the synchronization of our drive-master systems are shown in Figs. 1–3. In this numerical example, we employed the first type of Lagrange interpolation approximation to draw the image of the fractional-order Caputo derivative.

Dynamics of states \(u_{1}(t)\) and \(v_{1}(t)\)

Dynamics of states \(u_{2}(t)\) and \(v_{2}(t)\)

Dynamics of states \(e_{1}(t)\) and \(e_{2}(t)\)
References
Ahn, C.K.: Delay-dependent state estimation for T-S fuzzy delayed Hopfield neural networks. Nonlinear Dyn. 61, 483–489 (2010)
Arbi, A., Cao, J., Alsaedi, A.: Improved synchronization analysis of competitive neural networks with time-varying delays. Nonlinear Anal., Model. Control 23(1), 82–102 (2018)
Bao, H., Park, J.H., Cao, J.: Adaptive synchronization of fractional-order memristor-based neural networks with time delay. Nonlinear Dyn. 158, 1343–1354 (2015)
Cao, Y., Frank, P.M.: Stability analysis and synthesis of nonlinear time-delay systems via linear Takagi–Sugeno fuzzy models. Fuzzy Sets Syst. 124(2), 213–229 (2001)
Chadli, M., Zelinka, I.: Chaos synchronization of unknown inputs Takagi–Sugeno fuzzy: application to secure communications. Comput. Math. Appl. 68(12), 2142–2147 (2014)
Chen, D., Zhao, W., Sprott, J.C., Ma, X.: Application of Takagi–Sugeno fuzzy model to a class of chaotic synchronization and anti-synchronization. Nonlinear Dyn. 73(3), 1495–1505 (2013)
Chen, J., Zeng, G., Jiang, P.: Global Mittag–Leffler stability and synchronization of memristor-based fractional-order neural networks. Neural Netw. 51, 1–8 (2014)
He, W., Cao, J.: Exponential synchronization of hybrid coupled networks with delayed coupling. IEEE Trans. Neural Netw. 21(4), 571–583 (2010)
Hu, J., Liang, J., Cao, J.: Synchronization of hybrid-coupled heterogeneous networks: pinning control and impulsive control schemes. J. Franklin Inst. 351(5), 2600–2622 (2014)
Huang, X., Cao, J.: Generalized synchronization for delayed chaotic neural networks: a novel coupling scheme. Nonlinearity 19(12), 2797–2811 (2006)
Jiang, H., Wang, K., Teng, Z.: Adaptive synchronization of neural networks with time-varying delay and distributed delay. Phys. A, Stat. Mech. Appl. 387(2–3), 631–642 (2008)
Kilbas, A., Srivastava, H., Trujillo, J.: Theory and Applications of Fractional Differential Equations. Elsevier, Amsterdam (2006)
Li, B., Liu, Y., Kou, K., Yu, L.: Event-triggered control for the disturbance decoupling problem of Boolean control networks. IEEE Trans. Cybern. (2017). https://doi.org/10.1109/TCYB.2017.2746102
Li, P., Cao, J., Wang, Z.: Robust impulsive synchronization of coupled delayed neural networks with uncertainties. Phys. A, Stat. Mech. Appl. 373, 261–272 (2007)
Li, X., Rakkiyappan, R., Sakthivel, N.: Non-fragile synchronization control for Markovian jumping complex dynamical networks with probabilistic time-varying coupling delay. Asian J. Control 17(5), 1678–1695 (2015)
Lin, T., Lee, T., Balas, V.E.: Adaptive fuzzy sliding mode control for synchronization of uncertain fractional order chaotic systems. Chaos Solitons Fractals 44(10), 791–801 (2011)
Lu, J.Q., Ho, D.W.C., Cao, J.D., Kurths, J.: Single impulsive controller for globally exponential synchronization of dynamical networks. Nonlinear Anal., Real World Appl. 14(1), 581–593 (2013)
Lu, W., Chen, T.: Synchronization of coupled connected neural networks with delays. IEEE Trans. Circuits Syst. I, Regul. Pap. 51(12), 2491–2503 (2004)
Ma, W., Li, C., Wu, Y.: Impulsive synchronization of fractional Takagi–Sugeno fuzzy complex networks. Chaos, Interdiscip. J. Nonlinear Sci. published online, 2016
Rakkiyappan, R., Velmurugan, G., Cao, J.: Finite-time stability analysis of fractional-order complex-valued memristor-based neural networks with time delays. Nonlinear Dyn. 78(4), 2823–2836 (2014)
Song, Q., Yang, X., Li, C., Huang, T., Chen, X.: Stability analysis of nonlinear fractional-order systems with variable-time impulses. J. Franklin Inst. 354(7), 2959–2978 (2017)
Song, S., Song, X., Balsera, T.: Adaptive projective synchronization for fractional-order T-S fuzzy neural networks with time-delay and uncertain parameters. Optik 129, 140–152 (2017)
Tang, Y., Fang, J., Xia, M., Gu, X.: Synchronization of Takagi–Sugeno fuzzy stochastic discrete-time complex networks with mixed time-varying delays. Appl. Math. Model. 34(4), 843–855 (2010)
Wang, L., Wang, Z., Han, Q.-L., Wei, G.: Synchronization control for a class of discrete-time dynamical networks with packet dropouts: a coding-decoding-based approach. IEEE Trans. Cybern. (2017)
Wang, Y., Guan, Z., Wang, H.O.: Impulsive synchronization for Takagi–Sugeno fuzzy model and its application to continuous chaotic system. Phys. Lett. A 339(3–5), 325–332 (2005)
Xia, Y., Yang, Z., Han, M.: Lag synchronization of unknown chaotic delayed Yang–Yang-type fuzzy neural networks with noise perturbation based on adaptive control and parameter identification. IEEE Trans. Neural Netw. 20(7), 1165–1180 (2009)
Xia, Y., Yang, Z., Han, M.: Synchronization schemes for coupled identical Yang–Yang-type fuzzy cellular neural networks. Commun. Nonlinear Sci. Numer. Simul. 14(10), 3645–3659 (2009)
Yang, X., Cao, J.: Hybrid adaptive and impulsive synchronization of uncertain complex networks with delays and general uncertain perturbations. Appl. Math. Comput. 227, 480–493 (2014)
Yang, X., Lam, J., Ho, D.W.C., Feng, Z.: Fixed-time synchronization of complex networks with impulsive effects via nonchattering control. IEEE Trans. Autom. Control 62(11), 5511–5521 (2017)
Yang, X., Lu, J., Ho, D.W.C., Song, Q.: Synchronization of uncertain hybrid switching and impulsive complex networks. Appl. Math. Model. 59, 379–392 (2018)
Yu, L., Yu, Z.: Synchronization of stochastic impulsive discrete-time delayed networks via pinning control. Neurocomputing 286, 31–40 (2018)
Yu, W., Cao, J.: Adaptive synchronization and lag synchronization of uncertain dynamical system with time delay based on parameter identification. Physica A 375(2), 467–482 (2007)
Zhang, H., Ye, M., Ye, R., Cao, J.: Synchronization stability of Riemann–Liouville fractional delay-coupled complex neural networks. Phys. A, Stat. Mech. Appl. 508, 155–165 (2018)
Zhang, H., Ye, R., Liu, S., Cao, J., Alsaedi, A., Li, X.: LMI-based approach to stability analysis for fractional-order neural networks with discrete and distributed delays. Int. J. Syst. Sci. https://doi.org/10.1080/00207721.2017.1412534
Zhang, W., Wu, R., Cao, J., Alsaedi, A., Hayat, T.: Synchronization of a class of fractional-order neural networks with multiple time delays by comparison principles. Nonlinear Anal., Model. Control 22(5), 636–645 (2017)
Zhang, X., Li, X., Cao, J., Miaadi, F.: Design of memory controllers for finite-time stabilization of delayed neural networks with uncertainty. J. Franklin Inst. 355(13), 5394–5413 (2018)
Zheng, M., Li, L., Peng, H., Xiao, J., Yang, Y., Zhang, Y., Zhao, H.: Finite-time stability and synchronization of memristor-based fractional-order fuzzy cellular neural networks. Commun. Nonlinear Sci. Numer. Simul. 59, 272–291 (2018)
Zhu, Q., Li, X.: Exponential and almost sure exponential stability of stochastic fuzzy delayed Cohen–Grossberg neural networks. Fuzzy Sets Syst. 203, 74–94 (2012)
Acknowledgements
The authors thank the editor and anonymous referees for their valuable suggestions and comments, which improved the presentation of this paper.
Availability of data and materials
All data are fully available without restriction.
Funding
This work was supported in part by the National Natural Science Foundation of China under grants No. 11671176 and No. 61573004, the Natural Science Foundation of Zhejiang Province under grant No. LY15A010007, the Natural Science Foundation of Fujian Province under grant No. 2018J01001, the Start-up Fund of Huaqiao University, the Natural Science Foundation of Shandong Province (China) (grant No. ZR2018MA018), Subsidized Project for Postgraduates’ Innovative Fund in Scientific Research of Huaqiao University, partially supported by the Youth Foundation Ability Promotion Plan in Guangxi (KY2016YB404).
Author information
Authors and Affiliations
Contributions
BZ carried out the computations in the proof, participated in the sequence alignment, and drafted the manuscript. JZ carried out the simulations and figures. HL helped to draft the manuscript. JC participated in the discussion of the study. YX conceived of the study, proposed the project, and drafted the manuscript. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare that they have no conflict of interests.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Zhang, B., Zhuang, J., Liu, H. et al. Master–slave synchronization of a class of fractional-order Takagi–Sugeno fuzzy neural networks. Adv Differ Equ 2018, 473 (2018). https://doi.org/10.1186/s13662-018-1918-y
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13662-018-1918-y