
Abstract
In this study, the sinc collocation method is used to find an approximate solution of a system of differential equations of fractional order described in the Caputo sense. Some theorems are presented to prove the applicability of the proposed method to the system of fractional order differential equations. Some numerical examples are given to test the performance of the method. Approximate solutions are compared with exact solutions by examples. Some graphs and tables are presented to show the performance of the proposed method.
Similar content being viewed by others

1 Introduction
The last few decades, fractional differential equations systems are widely used for modelling the complex real world problems occurring in science and engineering applications [1–17]. Fractional differential equation systems involve non-integer order differential operators. There are some different definitions of a fractional derivative in the literature. Some of them are defined as follows. For \(0<\alpha<1\), the Caputo fractional derivative of f is [18]
The Riemann-Liouville derivative of f is [18]
The Caputo-Fabrizio derivative of f is [19]
The Atangana-Baleanu derivative of f is [20]
The conformable derivative also called alpha derivative of f is [21]
Its extension, the beta derivative of f is [22]
In this study, the Caputo definition of fractional order derivative is considered. Unfortunately, most of the fractional differential equations systems do not have exact analytic solutions, therefore approximation and numerical techniques must be applied for obtaining the solution of such systems. For this purpose, different numerical techniques are applied to fractional differential equations systems. For instance we have the Adomian decomposition method [23, 24], the variational iteration method [12, 25], the differential transform method [26], the homotopy perturbation method [27–29], the homotopy analysis method [30], and the fractional natural decomposition method [31].
It is revealed by [32] that sinc methods give a much better rate of convergence and more efficient results than classical polynomial methods in the presence of singularities. In the present paper, a sinc collocation method is proposed to find the approximate solution of the following system:
where \(\cdot^{(\alpha)}\) is the Caputo fractional derivative and \(0<\alpha _{i},\beta_{i}<1\) for \(i=1,2\). In the next section we give some background on fractional calculus and the sinc collocation method. In Section 3 we give some theorems to show the approximation of the proposed method. Then, in Section 4, we illustrate the findings with two numerical examples. Finally in the last section the paper is concluded.
2 Preliminaries
In this section, some preliminaries and notations related to fractional calculus and sinc basis functions are given. For more details we refer the reader to monographs [1–7, 33–35].
Definition 1
Let \(f:[a,b]\rightarrow\mathbb{R}\) be a function, α a positive real number, n the integer satisfying \(n-1\leq\alpha< n\), and Γ the Euler gamma function. Then the left Caputo fractional derivative of order α of \(f(x)\) is given as
Theorem 1
Let be \(\alpha>0\) and \(n \in\mathbb{N}\) such that \(n-1< \alpha\leq n\) and \(f(x)\in C^{n}[a,b]\) then
Theorem 2
Let be \(\alpha>0\) and \(D^{(\alpha)}\) is Riemann-Liouville fractional derivative. If f is continuous, then
Definition 2
The sinc function is defined on the whole real line \(-\infty< x<\infty\) by
Definition 3
For \(h>0\) and \(k=0,\pm1,\pm2,\ldots\) the translated sinc function with space node is given by
Definition 4
If \(f(x)\) is defined on the real line, then for \(h>0\) the series
is called the Whittaker cardinal expansion of f whenever this series converges.
In general, approximations can be constructed for infinite, semi-infinite and finite intervals. To construct an approximation on the interval \((a,b)\) the conformal map
is employed. This map carries \(D_{E}\) the eye-shaped domain in the z-plane
onto the infinite strip \(D_{S}\)
The basis functions on the interval \((a,b)\) are derived from the composite translated sinc functions
for \(z\in D_{E}\). The inverse map of \(w=\phi(z)\) is
The sinc grid points \(z_{k}\in(a,b)\) in \(D_{E}\) will be denoted by \(x_{k}\) because they are real. For the evenly spaced nodes \(\{kh\}_{k=-\infty }^{\infty}\) on the real line, the image which corresponds to these nodes is denoted by
Definition 5
Let \(D_{E}\) be a simply connected domain in the complex plane \(\mathbb {C}\), and let \(\partial D_{E}\) denote the boundary of \(D_{E}\). Let a, b be points on \(\partial D_{E}\) and ϕ be a conformal map \(D_{E}\) onto \(D_{S}\) such that \(\phi(a)=-\infty\) and \(\phi(b)=\infty\). If the inverse map of ϕ is denoted by φ, define
and \(z_{k}=\varphi(kh)\), \(k=0,\pm1,\pm2,\ldots\) .
Definition 6
Let \(B(D_{E})\) be the class of functions F that are analytic in \(D_{E}\) and satisfy
where
and those on the boundary of \(D_{E}\) satisfy
Theorem 3
Let Γ be \((0,1)\), \(F\in B(D_{E})\), then, for \(h>0\) sufficiently small,
where
Proof
See [18]. □
For the term of fractional in (1.1), the infinite quadrature rule must be truncated to a finite sum. The following theorem indicates the conditions under which an exponential convergence results.
Theorem 4
If there exist positive constants α, β and C such that
then the error bound for the quadrature rule (2.3) is
Proof
See [18]. □
The infinite sum in (2.3) is truncated with the use of (2.4) to arrive at the inequality (2.5). Making the selections
and
where \([\lfloor\cdot \rfloor]\) is an integer part of the statement and M is the integer value which specifies the grid size, then
We used these theorems to approximate the arising integral in the formulation of the term fractional in (1.1).
Lemma 1
Let ϕ be the conformal one-to-one mapping of the simply connected domain \(D_{E}\) onto \(D_{S}\), given by (2.2). Then
Proof
See [36]. □
3 The sinc-collocation method
We assume approximate solutions for problem (1.1) by the finite expansion of the sinc basis functions
where \(S_{k}(x)\) is the function \(S(k,h)\circ\phi(x)\). Here, the unknown coefficients are determined by the sinc-collocation method via the following theorems.
Theorem 5
Let be a function \(f(x)=\sum_{k=-M}^{N}c_{k}S_{k}(x)\) defined as the finite expansion of sinc basis functions, then the first and second derivatives of \(f(x)\) are given by
respectively.
Similarly, the order α derivative of \(f(x)\) for \(0<\alpha<1\) is given by the following theorem.
Theorem 6
If ψ is a conformal map for the interval \([a,x]\), then the order α Caputo derivative of \(f(x)\) for \(0<\alpha<1\) is given by
where
Proof
We use the definition of the Caputo fractional derivative given in (2.1), writing
where
Now we use the quadrature rule given in (2.6) to compute the above integral, which is divergent on the interval \([a,x]\). For this purpose, a conformal map and its inverse image that denotes the sinc grid points are given by
and
where \(h_{L}=\pi/\sqrt{L}\). Then, according to equality (2.6), we write
This completes the proof. □
Using in terms of (1.1) the approximations given in (3.1)-(3.4), multiplying the resulting equation by \(\{(1/\phi ')^{2}\}\), we obtain the following linear system:
where
and
By using Lemma 1, we know that
then we obtain the following theorem setting \(x=x_{j}\) in the above systems.
Theorem 7
If the assumed approximate solution of boundary value problem (1.1) is (3.1), then the discrete sinc-collocation system for the determination of the unknown coefficients is given by
Now we define some notations to represent in the matrix-vector form for system (3.5). Let \(\mathbf{D}(y)\) denote a diagonal matrix whose diagonal elements are \(y(x_{-M}),y(x_{-M+1}),{\ldots},y(x_{N})\) and non-diagonal elements are zero, let \(\mathbf{G}_{\alpha}=S_{k}^{(\alpha )}(x_{j})\) denote a matrix and also let \(\mathbf{I}^{(i)}\) denote the matrices
where D, \(\mathbf{G}_{\alpha}\), \(\mathbf{I}^{(0)}\), \(\mathbf {I}^{(1)}\) and \(\mathbf{I}^{(2)}\) are square matrices of order \(n\times n\). In order to calculate the unknown coefficients \(c_{k}\) in linear system (3.5), we rewrite this system by using the above notations in matrix-vector form as
where

Now we have a linear system of n equations in the n unknown coefficients given by (3.6). When it is solved, we can obtain the unknown coefficients that are necessary for an approximate solution in (3.1).
4 Computational examples
In this section, two problems that have homogeneous boundary conditions will be tested by using the present method via Mathematica10 on a personal computer. In all the examples, we take \(d=\pi/2\), \(L=M=N\).
Example 1
Consider system of fractional boundary value problem in the following form:
subject to the homogeneous boundary conditions
where
whose exact solutions are
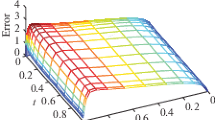
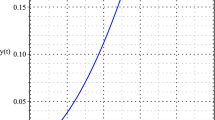
The numerical solutions which are obtained by using the sinc-collocation method (SCM) for this problem are presented in Table 1 and Table 2. In addition to, the graphics of the exact and approximate solutions for different values of N are given in Figure 1 and Figure 2.

Graphs of exact and approximate solutions for u in Example 1 .

Graphs of exact and approximate solutions for v in Example 1 .
Example 2
Consider the system of the fractional boundary value problem in the following form:
subject to the homogeneous boundary conditions
where
whose exact solutions are
The numerical solutions which are obtained by using the sinc-collocation method (SCM) for this problem are presented in Table 3 and Table 4. In addition, the graphics of the exact and approximate solutions for different values of N are given in Figure 3 and Figure 4.

Graphs of exact and approximate solutions for u in Example 2 .

Graphs of exact and approximate solutions for v in Example 2 .
5 Conclusion
This study focuses on the application of the sinc-collocation method to obtain the approximate solutions of the system of fractional order differential equations (1.1). The proposed method is applied to some special examples in order to illustrate the applicability and accuracy of the proposed method for equation (1.1). Obtained numerical solutions are compared with exact solutions and results are presented in tables and by graphics. Regarding the findings, it can be concluded that the sinc-collocation method is an effective and convenient method for obtaining the approximate solution of a system differential equations of fractional order.
References
Samko, SG, Kilbas, AA, Marichev, OI: Fractional Integrals and Derivatives. Gordon & Breach, Yverdon (1993)
Miller, K, Ross, B: An Introduction to the Fractional Calculus and Fractional Differential Equations. Wiley, New York (1993)
Oldham, KB, Spanier, J: The Fractional Calculus. Academic Press, New York (1974)
Podlubny, I: Fractional Differential Equations. Academic Press, San Diego (1999)
Baleanu, D, Diethelm, K, Scalas, E, Trujillo, JJ: Series on Complexity, Nonlinearity and Chaos in Fractional Calculus Models and Numerical Methods. World Scientific, Singapore (2012)
Kilbas, A, Srivastava, H, Trujillo, JJ: Theory and Applications of Fractional Differential Equations. Elsevier, Amsterdam (2006)
Lakshmikantham, V, Leela, S, Vasundhara, DJ: Theory of Fractional Dynamic Systems. Cambridge Scientific Publishers (2009)
Yang, XJ: Fractional derivatives of constant and variable orders applied to anomalous relaxation models in heat-transfer problems. Therm. Sci. 21(3), 1161-1171 (2017). doi:10.2298/TSCI161216326Y
Yang, XJ, Machado, JT: A new fractional operator of variable order: application in the description of anomalous diffusion. Physica A 481, 276-283 (2017)
Yang, XJ, Srivastava, HM, Machado, JA: A new fractional derivative without singular kernel: application to the modelling of the steady heat flow. Therm. Sci. 20, 753-756 (2016)
Yang, XJ, Machado, JT, Baleanu, D: On exact traveling-wave solution for local fractional Boussinesq equation in fractal domain. Fractals 25(4), 1740006 (2017)
Yang, XJ, Baleanu, D, Khan, Y, Mohyud-Din, ST: Local fractional variational iteration method for diffusion and wave equations on Cantor sets. Rom. J. Phys. 59(1-2), 36-48 (2014)
Baleanu, D, Golmankhaneh, AK, Nigmatullin, R, Golmankhaneh, AK: Fractional Newtonian mechanics. Cent. Eur. J. Phys. 8(1), 120 (2010)
Herrmann, R: Fractional Calculus: An Introduction for Physicists. World Scientific, Singapore (2014)
Sabatier, J, Agrawal, OP, Machado, JAT: Advances in Fractional Calculus: Theoretical Developments and Applications in Physics and Engineering. Springer, Berlin (2007)
Meilanov, RP, Magomedov, RA: Thermodynamics in fractional calculus. J. Eng. Phys. Thermophys. 87(6), 1521-1531 (2014)
Carpinteri, A, Cornetti, P, Sapora, A: Nonlocal elasticity: an approach based on fractional calculus. Meccanica 49(11), 2551-2569 (2014)
Secer, A, Alkan, S, Akinlar, MA, Bayram, M: Sinc-Galerkin method for approximate solutions of fractional order boundary value problems. Bound. Value Probl. 2013(1), 281 (2013)
Algahtani, OJJ: Comparing the Atangana-Baleanu and Caputo-Fabrizio derivative with fractional order: Allen Cahn model. Chaos Solitons Fractals 89, 552-559 (2016)
Atangana, A, Baleanu, D: New fractional derivatives with nonlocal and non-singular kernel: theory and application to heat transfer model. Therm. Sci. 20, 763-769 (2016). doi:10.2298/TSCI160111018A
Khalil, R, Al Horani, M, Yousef, A, Sababheh, M: A new definition of fractional derivative. J. Comput. Appl. Math. 264, 65-70 (2014)
Atangana, A, Doungmo Goufo, EF: Extension of matched asymptotic method to fractional boundary layers problems. Math. Probl. Eng. 2014, Article ID 107535 (2014). doi:10.1155/2014/107535
Jafari, H, Daftardar-Gejji, V: Solving a system of nonlinear fractional differential equations using Adomian decomposition. J. Comput. Appl. Math. 196(2), 644-651 (2006)
Duan, J, An, J, Xu, M: Solution of system of fractional differential equations by Adomian decomposition method. Appl. Math. J. Chin. Univ. Ser. A 22(1), 7-12 (2007)
Dixit, S, Singh, O, Kumar, S: An analytic algorithm for solving system of fractional differential equations. J. Mod. Methods Numer. Math. 1(1), 12-26 (2010)
Erturk, VS, Momani, S: Solving systems of fractional differential equations using differential transform method. J. Comput. Appl. Math. 215(1), 142-151 (2008)
Golmankhaneh, AK, Golmankhaneh, AK, Baleanu, D: On nonlinear fractional Klein-Gordon equation. Signal Process. 91(3), 446-451 (2011)
Khan, NA, Jamil, M, Ara, A, Khan, NU: On efficient method for system of fractional differential equations. Adv. Differ. Equ. 2011(1), 303472 (2011)
Abdulaziz, O, Hashim, I, Momani, S: Solving systems of fractional differential equations by homotopy-perturbation method. Phys. Lett. A 372, 451-459 (2008)
Jafari, H, Seifi, S: Solving a system of nonlinear fractional partial differential equations using homotopy analysis method. Commun. Nonlinear Sci. Numer. Simul. 14(5), 1962-1969 (2009)
Rawashdeh, MS, Al-Jammal, H: Numerical solutions for systems of nonlinear fractional ordinary differential equations using the FNDM. Mediterr. J. Math. 13(6), 4661-4677 (2016)
Mohsen, A, El-Gamel, M: On the Galerkin and collocation methods for two-point bound- ary value problems using sinc bases. Comput. Math. Appl. 56, 930-941 (2008)
Alkan, S: A new solution method for nonlinear fractional integro-differential equations. Discrete Contin. Dyn. Syst., Ser. S 8(6), 1065-1077 (2015)
Alkan, S, Secer, A: Solving the nonlinear boundary value problems by Galerkin method with the sinc functions. Open Phys. 13, 389-394 (2015)
Alkan, S, Yildirim, K, Secer, A: An efficient algorithm for solving fractional differential equations with boundary conditions. Open Phys. 14(1), 6-14 (2016)
Hesameddini, E, Asadollahifard, E: Numerical solution of multi-order fractional differential equations via the sinc collocation method. Iran. J. Numer. Anal. Optim. 5(1), 37-48 (2015)
Acknowledgements
The authors express their sincere thanks to the referee(s) for the careful and detailed reading of the manuscript.
Author information
Authors and Affiliations
Corresponding author
Additional information
Competing interests
The authors declare that they have no competing interests.
Authors’ contributions
The authors have contributed equally to this manuscript. They read and approved the final manuscript.
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Hatipoglu, V.F., Alkan, S. & Secer, A. An efficient scheme for solving a system of fractional differential equations with boundary conditions. Adv Differ Equ 2017, 204 (2017). https://doi.org/10.1186/s13662-017-1260-9
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13662-017-1260-9