
Abstract
This article investigates sufficient conditions for the existence and uniqueness of solutions to the ψ-Hilfer sequential type pantograph fractional boundary value problem. Considering the system depends on a lower-order fractional derivative of an unknown function, the study is carried out in a special working space. Standard fixed point theorems such as the Banach contraction principle and Krasnosel’skii’s fixed point theorem are applied to prove the uniqueness and the existence of a solution, respectively. Finally, an example demonstrating our results with numerical simulations is presented.
Similar content being viewed by others

1 Introduction
Fractional calculus and its implementations have grown in prominence due to their usefulness in representing a variety of complex phenomena in science and engineering [1–5]. One of the most important and distinctive issues in fractional calculus is the study of pantograph-type differential equations. It is a particular class of functional differential equations with proportional delay. It occurs in a variety of pure and applied mathematics areas, including quantum physics, electrodynamics, number theory, control systems and probability. Various researchers have used analytical and numerical methods to investigate the pantograph-type fractional differential equations (FDEs) [6–9]. Using fixed point techniques, some researchers proved the existence and uniqueness of the solution to some nonlinear classes of pantograph-type FDEs with a wider range of boundary conditions [10–15].
Sequential FDEs provide a flexible framework for describing complex systems with multiple memory-dependent processes. The sequential nature allows for the inclusion of fractional derivatives of various orders, providing a nuanced representation of system dynamics. This representation provides a richer mathematical framework for modelling diverse physical and engineering systems. This is advantageous in applications such as materials science, viscoelasticity and biological systems. Qualitative analysis of sequential FDEs is found in [16–20].
The generalised fractional derivative is a powerful tool for simulating complex real-world problems due to its increased precision. The Hilfer fractional derivative is a generalisation of Riemann–Liouville and Caputo fractional derivatives [1]. Sousa and Oliveira [21] provided the ψ-Hilfer fractional derivative with respect to another function. The advantage of the ψ-Hilfer fractional derivative is the freedom to select the differentiation operator and the kernel function ψ. Boundary value problems (BVPs) provide a natural framework for capturing real-world conditions and constraints [22–25]. BVPs involving the ψ-Hilfer fractional derivative were studied in [26–30].
In [12], a sequential pantograph problem involving the ϕ-Caputo derivative was taken into consideration, and the existence results were studied using Darbo’s fixed point theorem and the measure of noncompactness. Motivated by the above-mentioned works, we investigate the ψ-Hilfer sequential pantograph fractional BVP of the form
where \({^{H}}D^{\phi _{1},\eta _{1}:\psi}_{a^{+}} \), \({^{H}}D^{\phi _{2},\eta _{2}:\psi}_{a^{+}} \) and \({^{H}}D^{\alpha,\beta;\psi}_{a^{+}}\) are the ψ-Hilfer fractional derivatives of order \(\phi _{1}\), \(\phi _{2}\) and α respectively, with \(0<\alpha < \phi _{1},\phi _{2} < 1\) and type \(0\leq \eta _{1},\eta _{2},\beta \leq 1\), \(\omega _{i} \in \mathcal{R^{+}}\), \(\theta _{i} \in \mathcal{S}\), \(g: \mathcal{S} \times \mathcal{R} \times \mathcal{R} \times \mathcal{R} \rightarrow \mathcal{R} \) and \(f: \mathcal{S} \times \mathcal{R} \rightarrow \mathcal{R}\) are continuous functions on a Banach space.
The article is structured as follows: Sect. 2 presents the fundamental concepts, theorems and lemmas that support our investigation. In Sect. 3, the solution of BVP (1) is obtained. The existence and uniqueness of the solution to (1) are established in Sect. 4. In Sect. 5, an example is given.
2 Preliminaries
Let \(C([a,b],\mathcal{R})\) represent the space of all continuous functions from \([a,b]\longrightarrow \mathcal{R}\) and \(AC([a,b],\mathcal{R})\) be the space of all absolutely continuous functions from \([a,b]\longrightarrow \mathcal{R}\).
Definition 1
[2] Let \((a,b) ( {- \infty \leq a < b \leq \infty}) \) be a finite or infinite interval of the real line \(\mathcal{R}\) and ϑ> 0. Let \(\psi (t)\) be an increasing and positive monotone function on \((a,b] \), having a continuous derivative \(\psi ^{\prime}(t)\) on \((a,b)\). The ψ-Riemann–Liouville fractional integral \(I^{\vartheta;\psi}_{a^{+}}(\cdot ) \) of a function \(h \in AC^{n}([a,b],\mathcal{R})\) with respect to another function ψ on [a,b] is defined by
where \(\Gamma (.)\) represents the gamma function.
Definition 2
[2] Let \(\psi ^{\prime}(t) \neq 0\) and \(\vartheta >0\), \(n \in \mathbb{N}\). The Riemann–Liouville fractional derivative of order ϑ of a function \(h \in AC^{n}([a,b],\mathcal{R})\) with respect to another function ψ is defined by
where \(n=[\vartheta ]+1, [\vartheta ]\) represents the integer part of the real number ϑ.
Definition 3
[21] Let \(n-1 < \vartheta < n \) with \(n \in \mathbb{N}, [a,b] \) is the interval such that \({- \infty \leq a < b \leq \infty} \) and \(h,\psi \in C^{n}([a,b],\mathcal{R}) \) are two functions such that \(\psi (t) \) is increasing and \(\psi ^{\prime}(t) \neq 0 \) for all \(t \in [a,b] \). The ψ-Hilfer fractional derivative \(^{H}D^{\vartheta,\rho;\psi}_{a^{+}} (\cdot )\) of a function h of order ϑ and type \(0 \leq \rho \leq 1 \) is defined by
where \(n=[\vartheta ]+1, [\vartheta ]\) represents the integer part of the real number ϑ with \(\gamma =\vartheta +\rho (n-\vartheta )\).
Lemma 1
[2] Let \(\vartheta,\tau >0\). Then we have the following semigroup property:
Lemma 2
[21] If \(h \in C^{n}([a,b],\mathcal{R}), n-1 < \vartheta < n \) and \(0 \leq \rho \leq 1 \) and \(\gamma =\vartheta +\rho (n-\vartheta )\), then
for all \(t \in \mathcal{S}\), where \(h^{[n]}_{\psi} h(t)= (\frac{1}{\psi ^{\prime}(t)} \frac{d}{dt} )^{n} h(t)\).
Proposition 3
[2, 21] Let \(\vartheta \geq 0\), \(l>0\) and \(t>a\). Then the ψ-fractional integral and derivative of a power function are given by
-
1.
\(I^{\vartheta;\psi}_{a^{+}} (\psi (t)-\psi (a))^{l-1}(t) = \frac{\Gamma (l)}{\Gamma (l+\vartheta )} (\psi (t)-\psi (a))^{l+ \vartheta -1} \);
-
2.
\(D^{\vartheta,\rho;\psi}_{a^{+}} (\psi (t)-\psi (a))^{l-1}(t) = \frac{\Gamma (l)}{\Gamma (l-\vartheta )} (\psi (t)-\psi (a))^{l- \vartheta -1} \);
-
3.
\(^{H}D^{\vartheta,\rho;\psi}_{a^{+}} (\psi (t)-\psi (a))^{l-1}(t) = \frac{\Gamma (l)}{\Gamma (l-\vartheta )} (\psi (t)-\psi (a))^{l- \vartheta -1} \), \(l>\gamma =\vartheta +\rho (n-\vartheta )\).
Lemma 4
[30] Let \(n-1 < \vartheta < n, m-1< \alpha < m \leq n, m,n \in \mathbb{N}, 0 \leq \beta \leq 1 \) and \(\vartheta \geq \alpha +\beta (m-\alpha )\). If \(h \in {C^{m}}(\mathcal{S}, \mathcal{R})\), then
Lemma 5
(Banach contraction principle)
[31] If C is a closed non-empty subset of a Banach space B, then any contraction mapping \(\mathcal{U}: C \rightarrow C \) has a unique fixed point.
Theorem 6
(Krasnosel’skii’s fixed point theorem)
[32] Let D be a closed, bounded, convex and non-empty subset of a Banach space \((B,\Vert \cdot \Vert )\). Suppose that \(\mathcal{U}_{1}, \mathcal{U}_{2}\) are operators from D to D such that
-
1.
\(\mathcal{U}_{1}x + \mathcal{U}_{2}y \in D, \forall x, y \in D \);
-
2.
\(\mathcal{U}_{1}\) is continuous and compact;
-
3.
\(\mathcal{U}_{2}\) is a contraction mapping.
Then there exists \(z \in D \) such that \(z = \mathcal{U}_{1}z + \mathcal{U}_{2}z \).
3 An auxiliary result
System (1) relies on a lower-order fractional derivative of the state function. Therefore, we shall conduct the analysis in a special working space given by
The requirement that functions \(x(t)\) and \({^{H}}D^{\alpha,\beta;\psi}_{a^{+}} x(t)\) are continuous implies smoothness and regularity. We can verify from [33] that \(\mathcal{J}\) is a Banach space. \(\mathcal{J}\) also ensures that the solution is well posed and can be analysed within a rigorous mathematical framework.
For proving the existence results, Krasnosel’skii’s fixed point approach is more suitable for the above-considered special working space.
To demonstrate the existence and uniqueness of (1), it is essential to prove the following lemma.
Lemma 7
Let \(0<\alpha < \phi _{1},\phi _{2} < 1\), \(0\leq \eta _{1},\eta _{2},\beta \leq 1\), \(\gamma _{1}=\phi _{1}+ \eta _{1}(1-\phi _{1}), \gamma _{2}=\phi _{2}+\eta _{2}(1-\phi _{2})\), \(a \geq 0\) and \(\curlywedge \neq 0 \). Then, for \(g: \mathcal{S} \times \mathcal{J} \times \mathcal{J} \times \mathcal{J} \rightarrow \mathcal{J} \), \(f: \mathcal{S} \times \mathcal{J} \rightarrow \mathcal{J} \), the solution of the sequential pantograph fractional BVP (1) is given by
where
Proof
Using Lemma 2 and applying operator \(I^{\phi _{1};\psi}_{a^{+}}\) on both sides of (1), we have
Again applying operator \(I^{\phi _{2};\psi}_{a^{+}}\) on both sides of (1), we have
When \(x(a)=0\), we get \(c_{2}=0\). Then the above equation reduces to
Applying the other boundary condition, we get
This implies
Thus, (2) is satisfied.
Conversely, by direct calculation, we verify that (2) satisfies (1). □
4 Existence and uniqueness results
To verify the existence and uniqueness results, we model our system (1) as a fixed point problem.
Let us define an operator \(\mathcal{U}:\mathcal{J} \longrightarrow \mathcal{J}\) by
We state the following hypothesis:
\((\mathbf{H_{1}})\) Let \(g:\mathcal{S} \times \mathcal{J} \times \mathcal{J} \times \mathcal{J} \longrightarrow \mathcal{J}\) be a continuous function, and there exists a constant \(0< K_{g}<1\) such that, for all \(t \in \mathcal{S}\) and \(x_{1}, x_{2}, \bar{x_{1}}, \bar{x_{2}}, {x_{1}}^{\prime}, {x_{2}}^{ \prime }\in \mathcal{R}\),
\((\mathbf{H_{2}})\) Let \(f:\mathcal{S} \times \mathcal{J} \longrightarrow \mathcal{J}\) be a continuous function, and there exists a constant \(0< K_{f}<1\) such that, for all \(t \in \mathcal{S}\) and \(x_{1}, x_{2} \in \mathcal{R}\),
\((\mathbf{H_{3}})\) Let \(g:\mathcal{S} \times \mathcal{J} \times \mathcal{J} \times \mathcal{J} \longrightarrow \mathcal{J}\) and \(f:\mathcal{S} \times \mathcal{J} \longrightarrow \mathcal{J}\) be continuous functions, and there exist functions \(\sigma, \nu > 0\) such that, for all \(t \in \mathcal{S}\) and \(x, \bar{x}, {x}^{\prime}, \in \mathcal{R}\),
To simplify the process, let us introduce some notations.
where \(k= \phi _{1}+\phi _{2}\) or \(\phi _{1}+\phi _{2}-\alpha \), \(\bar{k}=\phi _{2}\) or \(\phi _{2}-\alpha \).
Uniqueness of solution.
Theorem 8
Assume that \((\mathbf{H_{1}})\) and \((\mathbf{H_{2}})\) are satisfied. Suppose that \(2K_{g} \mathcal{N}_{1} + K_{f} \mathcal{N}_{2} < 1\), where \(K_{f}\) and \(K_{g}\) are constants, \(\mathcal{N}_{1}\) and \(\mathcal{N}_{2}\) are given by (8) and (9) respectively. Then system (1) has a unique solution on \(\mathcal{S}\).
Proof
Consider the operator \(\mathcal{U}x(t)\) defined in (5).
Let \(\sup_{t\in \mathcal{S}} \Vert g(t,0,0,0) \Vert = M_{1} < \infty \), \(\sup_{t\in \mathcal{S}} \Vert f(t,0) \Vert = M_{2} < \infty \) and set
\(\mathcal{J}_{r}\) is a bounded, closed and convex subset of \(\mathcal{J}\).
Step 1: \(\mathcal{U}\mathcal{J}_{r} \subset \mathcal{J}_{r}\).
For any \(x \in \mathcal{J}_{r}\), \(t \in \mathcal{S}\), using \((\mathbf{H_{1}}) \), we have
Then, we obtain
and
Thus, \(\Vert \mathcal{U}x \Vert _{\mathcal{J}} \leq \mathcal{N} \Vert x \Vert _{\mathcal{J}} + \mathcal{N}_{1} M_{1} + \mathcal{N}_{2} M_{2} \leq r \).
This implies \(\mathcal{U}\mathcal{J}_{r} \subset \mathcal{J}_{r}\).
Step 2: \(\mathcal{U}\) is a contraction.
For any \(x, y \in \mathcal{J}_{r} \) and for each \(t \in \mathcal{S}\), using \((\mathbf{H_{1}})\), we have
and
Thus, \(\Vert \mathcal{U}x-\mathcal{U}y\Vert _{\mathcal{J}} \leq (2K_{g} \mathcal{N}_{1} + K_{f} \mathcal{N}_{2}) \Vert x-y \Vert _{ \mathcal{J}} \).
Since \(2K_{g} \mathcal{N}_{1} + K_{f} \mathcal{N}_{2} < 1\), the operator \(\mathcal{U}\) is a contraction.
Therefore, by Lemma 5, we conclude that \(\mathcal{U}\) has a unique fixed point, which is the unique solution of (1) on \(\mathcal{S}\). □
Existence of solution.
Theorem 9
Assume that \((\mathbf{H_{1}})\), \((\mathbf{H_{2}})\) and \((\mathbf{H_{3}})\) are satisfied. Suppose that \([2K_{g} (\mathcal{N}_{1}-\Upsilon (b,l)) + K_{f} (\mathcal{N}_{2}- \Upsilon (b,\bar{l})) ] < 1\), where \(l =\phi _{1}+\phi _{2}\) or \(\phi _{1}+\phi _{2}-\alpha \), \(\bar{l}=\phi _{2}\) or \(\phi _{2}-\alpha \), \(K_{f}\) and \(K_{g}\) are constants, \(\mathcal{N}_{1}\) and \(\mathcal{N}_{2}\) are given by (8) and (9) respectively. Then system (1) has at least one solution on \(\mathcal{S}\).
Proof
Let \(\sup_{t \in \mathcal{J}} \vert \sigma (t) \vert = \Vert \sigma \Vert, \sup_{t \in \mathcal{J}} \vert \nu (t) \vert = \Vert \nu \Vert \).
Also define a bounded subset \(\mathcal{J}_{\rho}\) of \(\mathcal{J} \), where \(\mathcal{J}_{\rho}= \{x \in \mathcal{J}: \Vert x \Vert \leq \rho \}\) with
Let us define the operators \(\mathcal{U}_{1}\) and \(\mathcal{U}_{2} \) on \(\mathcal{J}_{\rho}\) for \(t \in \mathcal{S} \) as \(\mathcal{U} =\mathcal{U}_{1} + \mathcal{U}_{2} \), where
Step 1: \(\mathcal{U}_{1} x + \mathcal{U}_{2} y \in \mathcal{J}_{\rho} \).
For any \(x \in \mathcal{J}_{\rho}\), \(t \in \mathcal{S}\), we obtain
and
Thus, \(\Vert \mathcal{U}_{1} x + \mathcal{U}_{2} y \Vert _{\mathcal{J}} \leq \mathcal{N}_{1} \Vert \sigma \Vert + \mathcal{N}_{2} \Vert \nu \Vert \leq \rho \).
Step 2: \(\mathcal{U}_{1}\) is completely continuous.
To prove \(\mathcal{U}_{1} \) is continuous and compact on \(\mathcal{J_{\rho}}\),
let \({x_{n}} \) be a sequence and \(x_{n} \longrightarrow x \) as \(n\longrightarrow \infty \) in \(\mathcal{J}_{\rho}\). Then, for \(t \in \mathcal{S}\), we have
and
Now, consider
and
Thus, \(\Vert \mathcal{U}_{1}x(t_{2})-\mathcal{U}_{1}x(t_{1}) \Vert _{ \mathcal{J}} \longrightarrow 0 \text{ as } t_{2} \longrightarrow t_{1} \), i.e. \(\mathcal{U}_{1}\mathcal{J}_{\rho}\) is equicontinuous.
Hence, \(\mathcal{U}_{1}\) is completely continuous on \(\mathcal{J}_{\rho}\) by the Arzela–Ascoli theorem [34].
Step 3: \(\mathcal{U}_{2}\) is a contraction.
For any \(x, y \in \mathcal{J}_{\rho }\) and for each \(t \in \mathcal{S}\), using \((\mathbf{H_{1}})\), we have
and
Thus, \(\Vert \mathcal{U}_{2}x-\mathcal{U}_{2}y\Vert _{\mathcal{J}} \leq [2K_{g} (\mathcal{N}_{1}-\Upsilon (b,l)) + K_{f} (\mathcal{N}_{2}- \Upsilon (b,\bar{l})) ] \Vert x-y \Vert _{\mathcal{J}} \).
Since \([2K_{g} (\mathcal{N}_{1}-\Upsilon (b,l)) + K_{f} (\mathcal{N}_{2}- \Upsilon (b,\bar{l})) ] < 1\), the operator \(\mathcal{U}_{2}\) is a contraction.
Therefore, by Theorem 6, we conclude that BVP (1) has at least one solution on \(\mathcal{S}\). □
5 Application
This section contains an example to demonstrate our results. Equation (1) can be found in various fields, including biology, physics and engineering, to model systems with memory effects and non-local dependencies; for instance, in describing the viscoelastic behaviour of the material that captures both internal dissipation and external influences. The linear viscoelastic Kelvin–Voigt model that describes the behaviour of materials exhibiting both elastic and viscous properties could be expressed using a sequential pantograph fractional differential equation.
Example 1
Consider the ψ-Hilfer sequential type pantograph fractional BVP
where g and f are given by
Here \(\phi _{1}=\frac{1}{2}\), \(\phi _{2}=\frac{7}{10}\), \(\eta _{1}=\frac{1}{10}\), \(\eta _{2}=\frac{2}{5}\), \(\alpha =\frac{1}{5}\), \(\beta =\frac{1}{3}\), \(a=0\), \(b=1\), \(m=3\), \(\omega _{i}= (\frac{-i}{i+3} )^{i+1} \), \(\theta _{i}=\frac{i}{5}\), \(\psi (t)=\sin t\), \(\psi ^{\prime}(t)=\cos t\). Using the data, we evaluate \(\gamma _{1}=0.5500\), \(\gamma _{2}=0.8200\), \(\curlywedge \approx 1.0066\), \(\mathcal{N}_{1} \approx 3.5153 \) and \(\mathcal{N}_{2} \approx 4.3360\).
(i) Uniqueness of solution
For \(x_{1},\bar{x_{1}},x_{1}^{\prime},x_{2},\bar{x_{2}},x_{2}^{\prime}, \in \mathcal{J}\) and \(t \in [0,1]\), we have
Comparing with \(\mathbf{(H_{1})}\) and \((\mathbf{H_{2}})\), we observe that \(K_{g}=\frac{1}{12}\) and \(K_{f}=\frac{1}{13} \).
We find that \(\Omega = 2K_{g} \mathcal{N}_{1} + K_{f} \mathcal{N}_{2} \approx 0.9194 < 1\).
Thus, the hypothesis of Theorem 8 is satisfied, and system (10) has a unique solution on \(\mathcal{S}\).
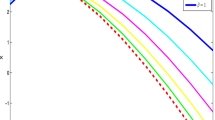
The numerical results of Ω for various values of \(t \in [0,1]\) and \(\phi _{1}\), \(\phi _{2} \in (0,1)\) are shown in Table 1.
We observe that for an increase in time, Ω increases, and for an increase in order, Ω decreases. Clearly, Ω is less than 1. The results are graphically presented in Fig. 1.

Representation of the impact of fractional order \(\phi _{1},\phi _{2}\) on Ω
(ii) Existence of solution
For \(x,\bar{x},x^{\prime }\in \mathcal{J}\) and \(t \in [0,1]\), we have
Hypothesis (\(\mathbf{H_{3}}\)) is satisfied.
We find that \(\Delta =\Omega -[2K_{g} \Upsilon (b,\phi _{1}+\phi _{2}-\alpha )+ K_{f} \Upsilon (b,\phi _{2}-\alpha )] \approx 0.6995 < 1\).
Thus, the hypothesis of Theorem 9 is satisfied, and system (10) has at least one solution on \(\mathcal{S}\).
The numerical results of Δ for various values of \(t \in [0,1]\) and \(\phi _{1}\), \(\phi _{2} \in (0,1)\) are shown in Table 2.
We observe that for an increase in time, Δ increases, and for an increase in order, Δ decreases. Clearly, Δ is less than 1. The results are graphically presented in Fig. 2.

Representation of the impact of fractional order \(\phi _{1},\phi _{2}\) on Δ
6 Conclusion
In this research, the ψ-Hilfer sequential-type pantograph fractional BVP was identified. In a special working space, the existence and uniqueness of a solution to the BVP were investigated. The Krasnosel’skii’s fixed point theorem was used to analyse the existence result, and the Banach contraction principle was used to study the uniqueness result. We have developed an example to interpret our findings. To further illustrate, a graphical analysis was also performed. In the future, the study can be extended to investigate the coupled system of sequential FDEs, and the stability of the solution can be analysed.
Data Availability
No datasets were generated or analysed during the current study.
References
Hilfer, R.: Applications of Fractional Calculus in Physics. World Scientific, Singapore (2000). https://doi.org/10.1142/3779
Kilbas, A.A., Srivastava, H.M., Trujillo, J.J.: Theory and Applications of Fractional Differential Equations, vol. 204. North-Holland Mathematics, Amsterdam (2006)
Podlubny, I.: Fractional Differential Equations. 198 Academic Press, San Diego (1999)
Samko, S.G., Kilbas, A.A., Marichev, O.I.: Fractional Integrals and Derivatives. Gordon and Breach, Yverdon (1993)
Wang, Z., Sun, L.: The Allen–Cahn equation with a time Caputo–Hadamard derivative: mathematical and numerical analysis. Commun. Anal. Mech. 15(4), 611–637 (2023). https://doi.org/10.3934/cam.2023031
Afshari, H., Marasi, H., Alzabut, J.: Applications of new contraction mappings on existence and uniqueness results for implicit ϕ-Hilfer fractional pantograph differential equations. J. Inequal. Appl. 2021(1), 185 (2021). https://doi.org/10.1186/s13660-021-02711-x
Eriqat, T., El-Ajou, A., Moa’ath, N.O., Al-Zhour, Z., Momani, S.: A new attractive analytic approach for solutions of linear and nonlinear neutral fractional pantograph equations. Chaos Solitons Fractals 138, 109957 (2020). https://doi.org/10.1016/j.chaos.2020.109957
Foukrach, D., Bouriah, S., Benchohra, M., Karapinar, E.: Some new results for ψ-Hilfer fractional pantograph-type differential equation depending on ψ-Riemann–Liouville integral. J. Anal. 30(1), 195–219 (2022). https://doi.org/10.1007/s41478-021-00339-0
Jafari, H., Mahmoudi, M., Noori Skandari, M.: A new numerical method to solve pantograph delay differential equations with convergence analysis. Adv. Differ. Equ. 2021(1), 129 (2021). https://doi.org/10.1186/s13662-021-03293-0
Almalahi, M.A., Panchal, S.K., Jarad, F., et al.: Results on implicit fractional pantograph equations with Mittag-Leffler kernel and nonlocal condition. J. Math. 2022, Article ID 9693005 (2022). https://doi.org/10.1155/2022/9693005
Bahar Ali Khan, M., Abdeljawad, T., Shah, K., Ali, G., Khan, H., Khan, A.: Study of a nonlinear multi-terms boundary value problem of fractional pantograph differential equations. Adv. Differ. Equ. 2021, 143 (2021). https://doi.org/10.1186/s13662-021-03313-z
Belarbi, S., Dahmani, Z., Sarikaya, M.Z.: A sequential fractional differential problem of pantograph type: existence uniqueness and illustrations. Turk. J. Math. 46(2), 563–586 (2022). https://doi.org/10.3906/mat-2108-81
George, R., Houas, M., Ghaderi, M., Rezapour, S., Elagan, S.: On a coupled system of pantograph problem with three sequential fractional derivatives by using positive contraction-type inequalities. Results Phys. 39, 105687 (2022). https://doi.org/10.1016/j.rinp.2022.105687
Guida, K., Ibnelazyz, L., Hilal, K., Melliani, S.: Existence and uniqueness results for sequential ψ-Hilfer fractional pantograph differential equations with mixed nonlocal boundary conditions. AIMS Math. 6(8), 8239–8255 (2021). https://doi.org/10.3934/math.2021477
Guida, K., Hilal, K., Ibnelazyz, L.: Existence results for a class of coupled Hilfer fractional pantograph differential equations with nonlocal integral boundary value conditions. Adv. Math. Phys. 2020, 1–8 (2020). https://doi.org/10.1155/2020/8898292
Khan, A., Li, Y., Shah, K., Khan, T.S., et al.: On coupled-Laplacian fractional differential equations with nonlinear boundary conditions. Complexity 2017, Article ID 8197610 (2017). https://doi.org/10.1155/2017/8197610
Devi, A., Kumar, A., Abdeljawad, T., Khan, A.: Stability analysis of solutions and existence theory of fractional Lagevin equation. Alex. Eng. J. 60(4), 3641–3647 (2021). https://doi.org/10.1016/j.aej.2021.02.011
Ganie, A.H., Houas, M., AlBaidani, M.M., Fathima, D.: Coupled system of three sequential Caputo fractional differential equations: existence and stability analysis. Math. Methods Appl. Sci. 46(13), 13631–13644 (2023). https://doi.org/10.1002/mma.9278
Morsy, A., Nisar, K.S., Ravichandran, C., Anusha, C.: Sequential fractional order neutral functional integro differential equations on time scales with Caputo fractional operator over Banach spaces. AIMS Math. 8(3), 5934–5949 (2023). https://doi.org/10.3934/math.2023299
Salem, A., Almaghamsi, L.: Solvability of sequential fractional differential equation at resonance. Mathematics 11(4), 1044 (2023). https://doi.org/10.3390/math11041044
Sousa, J.V.d.C., De Oliveira, E.C.: On the ψ-Hilfer fractional derivative. Commun. Nonlinear Sci. Numer. Simul. 60, 72–91 (2018). https://doi.org/10.1016/j.cnsns.2018.01.005
Huntul, M., Tamsir, M.: Reconstruction of timewise term for the nonlocal diffusion equation from an additional condition. Iran. J. Sci. Technol. Trans. A, Sci. 44, 1827–1838 (2020). https://doi.org/10.1007/s40995-020-00980-7
Huntul, M.: Identification of the timewise thermal conductivity in a 2d heat equation from local heat flux conditions. Inverse Probl. Sci. Eng. 29(7), 903–919 (2021). https://doi.org/10.1080/17415977.2020.1814282
Huntul, M., Lesnic, D.: Determination of the time-dependent convection coefficient in two-dimensional free boundary problems. Eng. Comput. 38(10), 3694–3709 (2021). https://doi.org/10.1108/EC-10-2020-0562
Huntul, M., Tamsir, M.: Simultaneous identification of timewise terms and free boundaries for the heat equation. Eng. Comput. 38(1), 442–462 (2021). https://doi.org/10.1108/EC-02-2020-0104
Bedi, P., Kumar, A., Abdeljawad, T., Khan, Z.A., Khan, A.: Existence and approximate controllability of Hilfer fractional evolution equations with almost sectorial operators. Adv. Differ. Equ. 2020, 615 (2020). https://doi.org/10.1186/s13662-020-03074-1
Harikrishnan, S., Elsayed, E., Kanagarajan, K.: Analysis of implicit differential equations via ψ-fractional derivative. J. Interdiscip. Math. 23(7), 1251–1262 (2020). https://doi.org/10.1080/09720502.2020.1741221
Maheswari, M.L., Shri, K.K.: On a class of non-local boundary value problem for a ψ-Hilfer non-linear fractional integro-differential equation. Acta Math. Univ. Comen. 92(2), 125–143 (2023)
Salim, A., Benchohra, M., Graef, J.R., Lazreg, J.E.: Initial value problem for hybrid ψ-Hilfer fractional implicit differential equations. J. Fixed Point Theory Appl. 24(1), 7 (2022). https://doi.org/10.1007/s11784-021-00920-x
Sudsutad, W., Thaiprayoon, C., Ntouyas, S.K.: Existence and stability results for ψ-Hilfer fractional integro-differential equation with mixed nonlocal boundary conditions. AIMS Math. 6(4), 4119–4141 (2021). https://doi.org/10.3934/math.2021244
Granas, A., Dugundji, J.: Fixed Point Theory, vol. 14. Springer, Berlin (2003). https://doi.org/10.1007/978-0-387-21593-8
Krasnosel’skii, M.A.: Two remarks on the method of successive approximations. Usp. Mat. Nauk 10(1), 123–127 (1955)
Su, X., Zhang, S.: Unbounded solutions to a boundary value problem of fractional order on the half-line. Comput. Math. Appl. 61(4), 1079–1087 (2011). https://doi.org/10.1016/j.camwa.2010.12.058
Green, J., Valentine, F.: On the Arzela–Ascoli theorem. Math. Mag. 34(4), 199–202 (1961). https://doi.org/10.1080/0025570X.1961.11975217
Acknowledgements
The authors extend their appreciation to the Deputyship for Research& Innovation, Ministry of Education in Saudi Arabia for funding this research work through the project number: ISP23-86.
Funding
The Deputyship for Research & Innovation, Ministry of Education in Saudi Arabia.
Author information
Authors and Affiliations
Contributions
All the authors contributed equally and significantly in writing this paper. All the authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Ethics approval and consent to participate
Not applicable.
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Aly, E.S., Maheswari, M.L., Shri, K.S.K. et al. A novel approach on the sequential type ψ-Hilfer pantograph fractional differential equation with boundary conditions. Bound Value Probl 2024, 56 (2024). https://doi.org/10.1186/s13661-024-01861-3
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13661-024-01861-3