
Abstract
Objectives
In this paper, a numerical scheme is designed for solving singularly perturbed Fredholm integro-differential equation. The scheme is constructed via the exact (non-standard) finite difference method to approximate the differential part and the composite Simpson’s 1/3 rule for the integral part of the equation.
Result
The stability and uniform convergence analysis are demonstrated using solution bound and the truncation error bound. For three model examples, the maximum absolute error and the rate of convergence for different values of the perturbation parameter and mesh size are tabulated. The computational result shows, the proposed method is second-order uniformly convergent which is in a right agreement with the theoretical result.
Similar content being viewed by others

Introduction
Numerous phenomenons in science and engineering are characterized by a rapid transition of the observable quantity, such as shock waves in fluid movements, boundary layer flow along the floor of a body, and edge results in elastic plate deformation. The mathematical models describing these phenomena incorporate a small parameter(s), and the effect of these parameter(s) displays a sudden alternate of the dependent variable, taking place within a small region. The solution of the boundary layer flow problem and that of the elastic plate are characterized by the reality that the small perturbation has an observable impact solely in the vicinity of the boundary, and therefore, one uses the term “singular perturbations of boundary layer type” [14].
Singularly perturbed differential equations are typically characterized by a small parameter (\( \varepsilon \)) multiplying some or all of the highest-order derivative terms in the differential equation. In general, the solutions to such equations exhibit multi-scale phenomena [20]. Within certain thin sub-regions of the domain, the scale of some derivatives is significantly larger than other derivatives [10, 27]. These thin regions of rapid change are referred to as boundary layers [1].
Many mathematical formulations in natural science, i.e., the study of fluids, biology, and chemical kinetics, contain integro-differential equations [5, 21, 23, 24]. It can be classified into two types, i.e., Fredholm and Volterra equations. Volterra equations have the upper bound limit as a variable, while the Fredholm equation has a fixed bound of limits. Numerous works on the numerical treatment of Fredholm/Volterra integral equations have been developed. To list a few of them: In [6] a fast multiscale Galerkin method is developed. In [13] several numerical approaches are proposed for the solution of Fredholm integro-differential equations modelling neural networks. The solution strategy is to use expansions onto standard cardinal basis functions and the collocation method. The Adomian decomposition method is used in [15], an iterative method based on the least square QR factorization method is used in [16], a comparison between the variational iteration method and trapezoidal rule is discussed in [25].
In this paper, we focus on singularly perturbed Fredholm integro-differential equations. Singularly perturbed integral equations or integro-differential equations are shown in the mathematical model of population variability, polymer rhythm, and glucose tolerance [7]. In particular, the singularly perturbed Fredholm integral equation is given by optimal control problems [22]. It is known that, unless strong constraints are made on the step size of a discretization, most of the classical numerical methods are not fit to handle the problems with a small parameter multiplying the derivative. The truncation error becomes unbounded as the perturbation parameter gets small. Due to this, the numerical treatment of singularly perturbed problems presents severe difficulties that have to be addressed to ensure accurate numerical solutions [4]. As a result, in recent years, few works on the numerical solution of singularly perturbed Fredholm/Volterra integral equations have been recorded in the literature [11, 12]. Durmaz et al. [8] developed a fitted difference scheme on Shishkin mesh using interpolating quadrature rules and an exponential basis function for the numerical treatment of the singularly perturbed Fredholm integro-differential equation with mixed boundary conditions.
To solve the initial-value problem for a singularly perturbed Fredholm integro-differential equation, Amiraliyev et al. [2] proposed a fitted finite difference scheme on a uniform mesh. The difference scheme was via the method of integral identities with the use of exponential basis functions and interpolating quadrature rules with the weight. The method exhibits a first-order uniform convergence. Amiraliyev et al. in [1] applied a fitted mesh method for solving the singularly perturbed Volterra delay-integro-differential equation. The difference scheme was constructed based on the method of integral identity by using interpolating quadrature rules.
Kudu et al. in [17] constructed a numerical method for first-order singularly perturbed delay integro-differential equations. They used implicit difference rules to discretize the differential part and composite quadrature rules for the integral part. The authors in [7] presented a difference scheme to solve singularly perturbed Fredholm integro-differential equations. The difference scheme was constructed via the method of integral identities using interpolating quadrature rules with remainder terms in integral form. Their method is first-order convergent. Amiraliyev et al. [3] proposed a fitted finite difference scheme on the uniform mesh to solve the problem in (1). The difference scheme was constructed via the method of integral identities with the use of exponential basis functions and interpolating quadrature rules with weight and remainder terms in integral form. They discussed the convergence of the method and showed that it has first-order convergence. On the other hand, Durmaz et al. [9] proposed an exponentially fitted difference scheme on Shishkin mesh for the numerical solution of the problem in (1). The fitting factor was introduced via the method of integral identities with the use of exponential basis functions and interpolating quadrature rules with weight and remainder terms in integral form.
The objective of this paper is to develop an accurate and uniformly convergent numerical method for solving singularly perturbed Fredholm integro-differential equation. We used an exact (non-standard) finite difference method together with a composite Simpson’s 1/3 rule for approximating the problem; we established the stability analysis and the uniform convergence of the scheme.
Notation 1.1
The parameter C in this paper is a generic positive constant that is independent of the perturbation parameter \(\varepsilon \) and the mesh parameter \(h = \frac{1}{N}\). The norm \(\Vert .\Vert \) used in this paper is the maximum norm which is defined as \(\Vert g\Vert =\max _{x\in [0, l]}|g(x)|\).
Problem statement
We considered a singularly perturbed Fredholm integro-differential equation (SPFIDE) of the form:
where \( \varepsilon \in (0,1] \) is the perturbation parameter and \( \lambda \), A, B are given constant. It ia assumed that \( a(x)\ge \alpha > 0 \), f(x) and kernel function K(x, s) are the sufficiently smooth functions satisfying certain regularity conditions to be specified. Under these conditions, the solution u(x) of (1) exhibits a boundary layer at \( x = 0 \) and \( x = l \) [3].
Properties of the continuous solution
In this subsection, we analyse some properties of the continuous solution (1) which guarantee the existence and uniqueness of the exact solution. A replication of this property in the discrete form is used to analyze the numerical method which is presented in “Numerical discretization” section.
Lemma 2.1
[9, 17] (The maximum principle) Let \( u \in C^2[0,l] \cap C^0[0,l],\) and
with \(u(0)\ge 0, u(l)\ge 0 \) and \(L_{\varepsilon }u(x)\ge 0\) for \(x \in (0,l)\) then it holds that \(u(x)\ge 0, \; x\in [0,l]\).
Lemma 2.2
[9, 17] If \( a, f \in C^2[0,l], \frac{\partial ^sK}{\partial x^s}\in C[0,l]^2 \), (\(s=0,1,2 \)) then the solution u(x) of (1) hold the following bounds
Definition 2.1
A numerical scheme (or method) is said to be exact method, if the differential equation has the same solution as the difference scheme at the grid point \(x_{i}\) (i.e. there is no discretization error at the grid points).
Numerical discretization
In this section, we used the exact (non-standard) finite-difference method together with composite Simpson’s 1/3 rule to discretize the SPFIDE. The differential part will be approximated by using the exact finite-difference method. In order to construct exact finite difference method we follow the Mickens rules in [19]. Consider the constant coefficient sub-equations given by:
where \( a(x) \ge \alpha > 0 \). Thus, the equation in (4) has two linearly independent solutions namely \( e^{(\lambda _{1} x)} \) and \( e^{(\lambda _{2}x)} \) with \( \lambda _{1,2} = \pm \sqrt{\frac{\alpha }{\varepsilon }}. \)
On the domain [0, l] , using uniform mesh with mesh length \( \Delta x=h \) such that \( \Omega _{N} = \left\{ x_{i}= ih, i= 1, 2,..., N, \ x_{0}=0, \ x_{N}=l, \ h= \frac{l}{N}\right\} \) where N is the number of mesh points. Let us denote the approximate solution of u(x) at \( x_{i} \) by \( U_{i} \). The objective is to calculate a difference equation which has the same general solution as the differential equation in (4) at the grid point \( x_{i} \) given by \( u_{i} = A_{1} e^{(\lambda _{1} x_{i} )} + A_{2} e^{(\lambda _{2} x_{i} )} \). Using the theory of difference equations for second order linear difference equations in [19], we have
substituting the values of \( \lambda _{1} \)and \( \lambda _{2} \) and dividing both sides by \( e^{\sqrt{\frac{\alpha }{\varepsilon }}h}-e^{-\sqrt{\frac{\alpha }{\varepsilon }}h}\), we obtain:
which is an exact difference scheme for (4). After doing the arithmetic manipulation and rearrangement on (6), we obtain:
The denominator function for the discretization of second order derivative is \( \psi ^{2} = \ {\frac{4}{\gamma ^{2}}\sinh ^{2}(\gamma \frac{h}{2})} \). Adopting this denominator function for the variable coefficient problem, we can write as:
Using the denominator function \( \psi _{i}^{2} \) into the main discrete scheme, we obtain the difference scheme as:
Now, the truncation error of scheme (8) is given by
Taylor series expansions of the terms \( u_{i+1} \) and \( u_{i-1} \) are given as follows:
Using the truncated Taylor series expansions of the terms \( u_{i+1} \) and \( u_{i-1} \) yields
Moreover applying the composite Simpson 1/3 rule to the integral term in (8). In order to drive composite Simpson’s 1/3 rule substitute \( n=2 \) in Newton-Cotes quadrature formulae in [26] obtain the following result
where \( K(x_i,s_j)=K_{ij}\ u(s_j)=u_j \) for \( j=0,\ 1,\dots ,\ n \). Now, the error of this method can be approximated in the following way.
Let the function \( y=K(x_i,s)u(s) \) be continuous and possess a continuous derivatives in \( [s_0,s_2] \). Expanding y about \( s=s_0 \) we obtain
Therefore
From (10), (11) and (12), we get:
This is the error committed in the interval \( [s_0, s_2] \).
Generally, the composite Simpson’s 1/3 rule needs an even number of sub-divisions. Let [0, l] be sub-divided into N even number of sub-divisions, \( 0=s_0<s_1<s_2<\dots <s_N=l \), the integral over the whole interval is found by adding these integrations and is equal to
We obtain the errors in the intervals [0, l] as
where \( u^{(iv)}(\xi ) \) is the largest value of the N-quantities on 4th derivatives. Therefore, the integral term in (8) is approximated as:
From (8) and (14) for \(i=1,2, \dots N-1,\) we have the following relation
where \( R=-R_1-R_2 \) and
Based on (15) we propose the following difference scheme for approximating (1).
Lastly, from (16) the linear system equations for \( u_1, u_2, u_3, \dots , u_{N-1} \) are generated. Therefore, the generated system of linear algebraic equations can be written in matrix form of
where M and S are coefficient matrix, F is a given function and u is an unknown function which is to be determined. The entries of M, S and F are given as:
and
Stability and convergence analysis
In this section, we need to show the discrete scheme in (16) satisfy the discrete maximum principle, uniform stability estimates, and uniform convergence. The difference operator, \( L_{\varepsilon }^{N} \) satisfies the the following lemma.
Lemma 4.1
(Discrete maximum principle) Assume that the mesh function \( \Psi _{i} \) satisfies \( \Psi _{0} \ge 0\) and \( \Psi _{N} \ge 0\).Then \( L_{\varepsilon }^{N} \varPsi _{i} \ge 0 \), \( i=1,2 \dots , N-1 \), implies that \( \Psi _{i} \ge 0\), \(\forall i=0,1, \dots , N \).
Proof
Let k be such that \(\Psi _{k} = min \Psi _{i} \) and suppose that \( \Psi _{k} < 0 \). Evidently, \( k \notin \left\{ 0,N \right\} \), \( \Psi _{k} \le \Psi _{k+1} \) and \( \Psi _{k} \le \Psi _{k-1} \). If \( \psi _{i}^{2}= \ {\frac{4}{\sqrt{\frac{a(x_{i})}{\varepsilon }}^{2}}\sinh ^{2}(\sqrt{\frac{a(x_{i})}{\varepsilon }} \frac{h}{2})} \), it follows that
which is a contradiction. It follows that \( \Psi _{k} \ge 0 \), and thus that \( \Psi _{i} \ge 0, \; \forall i=0,1, \dots , N \). \(\square \)
The uniqueness of the solution is guaranteed by this discrete maximum principle. The existence follows easily since, as for linear problems, the existence of the solution is implied by its uniqueness [12]. The discrete maximum principle enables us to prove the next lemma which provides the boundedness of the solution.
Lemma 4.2
If \( u_i \) is the solution of the discrete problem (16) then it admits the bound
Proof
We consider the functions \( \varPsi ^{\pm } \) defined by \( \varPsi _{i}^{\pm }= p\pm u_i,\) where \( p=\alpha ^{-1} \max _{x_i\in [0, l]}|L_\varepsilon ^Nu_i|+max\left\{ |A|, |B|\right\} .\) At the boundaries we have
Now for \( \Omega _{N} \) we have
From Lemma 3.2 it follows that \( \varPsi _{i}^{\pm }\ge 0, \ \forall x_i\in [0,l] \), this completes the proof. \(\square \)
Lemma 4.3
[18] For all integers k on a fixed mesh, we have that
and
where \(x_{i} = ih, h = 1/N, i = 1, 2, \dots , N-1\).
Next, we analyze the uniform convergence of the method. From (15) and (16) for the error of the approximate solution \( z_i=u_i-u(x_i) \) we have
Theorem 4.1
Under the conditions of Lemma 2.2 and \( |\lambda |< \frac{\alpha }{\max _{1\le i \le N}\sum _{j=0}^{N}h\eta _j|K_{ij}|}, \) the solution U of (11) converges \( \varepsilon \)-uniformly to the solution u of (1). For the error of approximate solution the following bound holds
Proof
Applying the maximum principle, from (18) we have
hence
which implies of
Further we estimate for \( \Vert R\Vert \). Thereby
Using truncated Taylor series expansion of the denominator function \(\frac{1}{\psi _{i}^2}= \frac{1}{h^2} - \frac{\zeta }{(12\varepsilon )} + \frac{\zeta ^{2}h^{2}}{(240\varepsilon ^{2})} \) [18] and this result into
Using the bounds on the derivatives and Lemma 4.3 gives
using the relation \( h^2>h^4> h^6 >\dots \) and for the case \(O(h^4)\approx O(\varepsilon ) \), we obtain
The bound (20) together with (19) completes the proof. \(\square \)
Numerical results and discussion
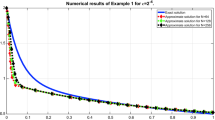
To verify the established theoretical results in this paper, we perform an experiment using the proposed numerical scheme on the problem of the form given in (1). We used the double mesh principle to estimate the maximum absolute error.
Example 5.1
Consider the singularly perturbed problem from [3]
Example 5.2
Consider singularly perturbed problem from [9]
Example 5.3
Consider the particular problem
The maximum absolute error is calculated using the formula \( E_{\varepsilon }^{N}=\max _{0\le i\le N}|u^{N}(x_{i})-u^{2N}(x_{2i})|,\) and rate of convergence by formula \( Roc^{N}=\log 2\left( \frac{E_{r}^{N}}{E_{r}^{2N}}\right) \).

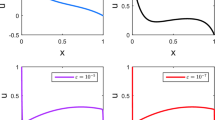
Solutions profile of Example 5.3 with the boundary layer formation as \( \varepsilon \) goes small for \( N=2^8 \)
The error analyses performed in this work reveal that the proposed method is second-order \( \varepsilon \)-uniformly convergent. This result, summarized in Theorem 4.1, is confirmed by numerical results displayed in Table 1, Table 3 and Table 5, where we computed the maximum absolute errors and rates of convergence for different values of mesh size N and perturbation parameter \( \varepsilon \) for Examples 5.1, 5.2 and 5.3, respectively. On Table 1, Table 3 and Table 5, one can observe that, as \( \varepsilon \) goes small the maximum absolute error of developed scheme becomes stable and bounded. This indicates that maximum absolute error of the scheme is independent of the perturbation parameter \( \varepsilon \), implying that the scheme is \( \varepsilon \)-uniformly convergent. In Table 2, we compared the result of the proposed scheme with the results in [3] for Example 5.1 and in Table 4, we compared the result of the proposed scheme with the results in [9] for Example 5.2. As one can observes in these tables results in the proposed method is better than that exists in [3] and [9].
In order to show the physical behaviour of the given problem, we give plots of the computed solutions for different values of \( \varepsilon \). In Fig. 1, the profile of the solution is given for different values of the perturbation parameter \( \varepsilon \) with boundary layer formulation as \( \varepsilon \) goes small.
Conclusion
In this paper, a linear second-order singularly perturbed Fredholm integro-differential equation has been considered. This problem is solved numerically on a uniform mesh using a non-standard finite difference for the differential part and a composite Simpson’s 1/3 rule for the integral part. The stability and convergence analysis of the proposed scheme are proven. Three examples are used to investigate the applicability of the scheme. Effect of the perturbation parameter on the solution of the problem is shown using figures. It is demonstrated that the method is uniformly convergent (i.e., independent of the perturbation parameter), with a second order of convergence. Performance of the proposed scheme is investigated by comparing the results with those of prior studies. It has been found that the proposed method gives more accurate and stable results.
Availability of data and materials
The original contributions presented in the study are included in the article/supplementary materials, further inquiries can be directed to the corresponding author.
References
Amirali G, Yapman Ö. On the volterra delay-integro-differential equation with layer behavior and its numerical solution. 2019.
Amiraliyev GM, Durmaz ME, Kudu M. Uniform convergence results for singularly perturbed fredholm integro-differential equation. J Math Anal. 2018;9(6):55–64.
Amiraliyev GM, Durmaz ME, Kudu M. A numerical method for a second order singularly perturbed fredholm integro-differential equation. Miskolc Mathemat Notes. 2021;22(1):37–48.
Anilay WT, Duressa GF, Woldaregay MM. Higher order uniformly convergent numerical scheme for singularly perturbed reaction-diffusion problems. Kyungpook Mathemat J. 2021;61(3):591–612.
Bhat IA, Mishra LN. Numerical solutions of volterra integral equations of third kind and its convergence analysis. Symmetry. 2022;14(12):2600.
Chen J, He M, Huang Y. A fast multiscale galerkin method for solving second order linear fredholm integro-differential equation with dirichlet boundary conditions. J Comput Appl Mathemat. 2020;364: 112352.
Cimen E, Cakir M. A uniform numerical method for solving singularly perturbed fredholm integro-differential problem. Comput Appl Mathemat. 2021;40(2):1–14.
Durmaz ME, Am İralİ G, Kudu M. Numerical solution of a singularly perturbed fredholm integro differential equation with robin boundary condition. Turkish J Mathemat. 2022;46(1):207–24.
Durmaz ME, Amiraliyev GM. A robust numerical method for a singularly perturbed fredholm integro-differential equation. Mediterr J Mathemat. 2021;18(1):1–17.
Ejere AH, Duressa GF, Woldaregay MM, Dinka TG. A uniformly convergent numerical scheme for solving singularly perturbed differential equations with large spatial delay. SN Appl Sci. 2022;4(12):324.
Iragi BC, Munyakazi JB. New parameter-uniform discretisations of singularly perturbed volterra integro-differential equations. 00(0):–, 2018.
Iragi BC, Munyakazi JB. A uniformly convergent numerical method for a singularly perturbed volterra integro-differential equation. Int J Comp Mathemat. 2020;97(4):759–71.
Jackiewicz Z, Rahman M, Welfert BD. Numerical solution of a fredholm integro-differential equation modelling \(\theta \)-neural networks. Appl Mathemat Comput. 2008;195(2):523–36.
Kadalbajoo MK, Gupta V. A brief survey on numerical methods for solving singularly perturbed problems. Appl Mathemat Comput. 2010;217(8):3641–716.
Karim MF, Mohamad M, Rusiman MS, Che-Him N, Roslan R, Khalid K. Adm for solving linear second-order fredholm integro-differential equations. In Journal of Physics: Conference Series, volume 995, page 012009. IOP Publishing, 2018.
Karimi S, Jozi M. A new iterative method for solving linear fredholm integral equations using the least squares method. Appl Mathemat Comput. 2015;250:744–58.
Kudu M, Amirali I, Amiraliyev GM. A finite-difference method for a singularly perturbed delay integro-differential equation. J Comput Appl Mathemat. 2016;308:379–90.
Mbroh NA, Munyakazi JB. A robust numerical scheme for singularly perturbed parabolic reaction-diffusion problems via the method of lines. Int J Comp Mathemat. 2021. https://doi.org/10.1080/00207160.2021.1954621.
Mickens RE. Advances in the applications of nonstandard finite difference schemes. Chennai, Tamil Nadu: World Scientific; 2005.
Miller JJ, O’riordan E, Shishkin GI. Fitted numerical methods for singular perturbation problems: error estimates in the maximum norm for linear problems in one and two dimensions. World scientific, 1996.
Mishra LN, Pathak VK, Baleanu D. Approximation of solutions for nonlinear functional integral equations. Aims Math. 2022;7(9):17486–506.
Nefedov NN, Nikitin AG. The cauchy problem for a singularly perturbed integro-differential fredholm equation. Comput Mathemat Mathemat Phys. 2007;47(4):629–37.
Pathak VK, Mishra LN. Application of fixed point theorem to solvability for non-linear fractional hadamard functional integral equations. Mathematics. 2022;10(14):2400.
Pathak VK, Mishra LN, Mishra VN, Baleanu D. On the solvability of mixed-type fractional-order non-linear functional integral equations in the banach space c (i). Fractal Fract. 2022;6(12):744.
Saadati R, Raftari B, Abibi H, Vaezpour S, Shakeri S. A comparison between the variational iteration method and trapezoidal rule for solving linear integro-differential equations. World Appl Sci J. 2008;4(3):321–5.
Tuemay T, Dessalegn A. Developing and analyzing newton-c’otes quadrature formulae for approximating definite integrals-ac++ approach. Momona Ethiopian J Sci. 2019;11(2):301–16.
Woldaregay MM, Duressa GF. Accurate numerical scheme for singularly perturbed parabolic delay differential equation. BMC Res Notes. 2021;14:1–6.
Acknowledgements
Authors are grateful to the anonymous referees and handling editor for their constructive comments.
Funding
No funding organization for this research work.
Author information
Authors and Affiliations
Contributions
SRB carried out scheme development, MATLAB coding and numerical experimentation MMW & TGD formulated the problem, design, and draft the manuscript. All authors read and approved the final version of the manuscript.
Corresponding author
Ethics declarations
Ethics approval and consent to participate
Not applicable.
Consent for publication
Not applicable.
Competing interests
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/. The Creative Commons Public Domain Dedication waiver (http://creativecommons.org/publicdomain/zero/1.0/) applies to the data made available in this article, unless otherwise stated in a credit line to the data.
About this article

Cite this article
Badeye, S.R., Woldaregay, M.M. & Dinka, T.G. Solving singularly perturbed fredholm integro-differential equation using exact finite difference method. BMC Res Notes 16, 233 (2023). https://doi.org/10.1186/s13104-023-06488-8
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13104-023-06488-8