
Abstract
Background
The use of assistive robotic systems in care is intended to relieve nursing staff. Differentiated and literature-based findings on current application possibilities, technological developments and empirical findings are necessary to enable a goal-oriented and participatory development of assistive robotic systems of care. The aim of this review was to identify assistive robotic systems and their areas of application in nursing settings. Furthermore, an overview of existing social and nursing science findings from the research field of assistive robotic systems will be described.
Methods
A systematic literature search was performed based on the JBI scoping review methodology. During the period from May to August 2020, the databases MEDLINE via PubMed, CINAHL, Cochrane Library, Web of Science, and IEEE Xplore Digital Library were searched. In order to reflect current developments and evidence in the present literature work, a supplementary search with these same requirements was conducted in January 2022.
Results
The 47 included publications are divided into 15 studies, 23 technical articles and nine opinion-based articles (text-opinion). A total of 39 different assistive robotic systems were identified. There were 55% in the testing phase and 29% of the systems in the development phase. Assistive robotic systems can be divided into six fields of application: Information and patient data processing, assistance with activities of daily living, fetch and bring activities, telepresence and communication, monitoring, safety and navigation, and complex assistance systems. The description of the study findings is divided into "integration of technology and impact on practice" and "attitude and acceptance of elderly people towards assistive robotic systems".
Conclusion
The results of the research show that the use of assistive robotic systems in care mainly take place in the context of development and testing phases. In addition to usability and acceptance issues, implementation factors must be integrated into theory-driven research projects.
Similar content being viewed by others


Background
Under the conditions of demographic change and epidemiological developments, Western society is challenged to provide high-quality care that can be financed in the long term [1]. Under this demand, the profession of nursing is confronted with different challenges, such as the shortage of skilled personnel. This has a direct impact on the profession. Hendrich et al. [2] state that nurses spend a large part of their working time on activities that are not related to the patient, such as performing service activities or administrative tasks, which in some cases also results in unnecessary walking. In addition, nursing tasks are frequently interrupted. This is caused by requests from colleagues and patients as well as alarms and telephone calls. The number of interruptions increases with the number of persons to be cared for [2]. These interruptions are additional stressors and reduce the quality of nursing actions as well as the effectiveness of work processes, which can lead to an additional workload in the daily work routine [3, 4]. To counteract these challenges, innovative digital and robotic systems are increasingly entering the nursing sector. Innovative technologies are intended to support nursing staff and contribute to improving the quality of care. One approach here is aimed at supporting people in need of assistance as well as formal and informal caregivers through autonomous robotic systems. The classification of these systems is based less on their technical capabilities. Rather, they are subdivided in terms of their practical use and functions, such as assistance in a social care context, monitoring function, or nursing assistance [5,6,7]. Another differentiation approach is the subdivision into service robotics and social-assistive robotics. Social-assistive robotic systems can be differentiated into emotional care and cognitive support functions. Systems with cognitive support functions provide mental stimuli through often simple memory exercises [8]. The term service robotics covers technical systems that support humans in performing services and work in a partially or fully automated manner. They are used in non-industrial fields of application and operated by persons who are not specially trained. In addition to informational and sensory functions, service robotics are also capable of locomotion and/or performing complex tasks consisting of multiple steps and materials [9, 10].
Innovative technologies for caregiving are generally hoped to relieve the burden on formal and informal caregivers. However, the development of these technologies is still in its infancy, highlighting the need for fundamental research [11,12,13]. Differentiated and literature-based findings on current application possibilities, technological developments and empirical findings are necessary to enable a goal-oriented and participatory development of assistive robotic systems for care.
Regarding the state of research, a first orienting search identified reviews that dealt with the topic of robotic systems in nursing with corresponding foci. In the scoping review by Buhtz et al. [14], the possibilities and applications of robotic systems were investigated with a focus on the nursing care context in the home environment. The concept of need for care as described in German social legislation was chosen as the nursing relevance criterion. Maalouf et al. [8] focused in their scoping review on the categorization of robotic systems used in nursing care. Other reviews have referred to specific user groups such as the elderly or people with cognitive impairments [15, 16]. Reviews on assistive robotic systems that consider both cross-sectoral and potential users in care contexts could not be located in an orienting search. This review therefore takes a scientific, practical and user-oriented perspective. In addition to assistive robotic systems, the focus is on nursing fields of action and persons within the nursing and care process.
The aim of this review was to identify assistive robotic systems and their application areas and possibilities in nursing settings, as well as potential users. Furthermore, an overview of existing social and nursing science findings from the research field of assistive robotic systems will be described. For this purpose, the following research questions were guiding:
-
For which fields of activity and application are assistive robotic systems being developed in nursing settings?
-
What social and nursing science findings are available in the field of assistive robotic systems?
Method
A systematic literature search was conducted using the PRISMA statement for scoping reviews. For this, the recommendations of the JBI were methodologically followed. This form of systematic literature review was chosen to provide an orientation to the current state of the research literature, to delineate areas of work and topics, and to map key concepts in the research and development field of assistive robotic systems in nursing [17, 18]. The conduct of the review was planned and recorded using the recommendations of Nordhausen and Hirt [19].
Inclusion and exclusion criteria
The PCC scheme (Population, Concept, and Context) was used to define and differentiate the search components [17]:
-
Population: in addition to caregivers, individuals in need of care and relatives were included as users. This heterogeneous composition was chosen in order to be able to make a differentiated statement about the target groups in the field of assistive robotic systems for care.
-
Concept: For this review, the term assistive robotic systems was used according to Schraft & Volz [9] and Graf et al. [10] defined. These define assistive robotic systems as partially and fully autonomous robotic systems for non-industrial fields of work, which can be operated by persons who are not specially trained, such as persons in need of care and/or their relatives. In addition, the included assistive robotic systems had to be able to move around and perform complex tasks consisting of multiple steps and/or materials [9, 10]. Systems that affect human cognitive and emotional well-being were excluded. Furthermore, robotic systems for surgery, rehabilitation, and mobilization were excluded.
-
Context: In order to comply with the sensitive search principle, the context of the literature search refers not only to the acute inpatient sector, but also to the outpatient and inpatient care sector.
Search strategy
Based on the methodological guidance for scoping reviews (JBI methodology) [17], the search strategy was iterative and as comprehensive as possible. In addition to primary studies and reviews, gray literature (expert opinions, reports, guidelines) and technology-related articles were included. No restriction was placed on the time period of publication to include early or recent developments in the field. Publications in German and English were considered.
In the first step of the literature search, a general search on the topic of assistive robotic systems for nursing care was conducted in the databases CINAHL and MEDLINE via PubMed. The articles found were analyzed with regard to relevant keywords and key terms (keywords) in the title and abstract. On this basis, the search strategy (Table 1) for the second step of the literature search was developed. The search terms in the search strategy also break down based on the PCC scheme [17]. Within each topic block, the search terms were linked using the OR operator. The three topic blocks were linked using the AND operator. Individual search terms were supplemented with wildcards. In order to obtain more hits, the search terms within the respective databases were extended to the entire text. The second database search was performed in the following databases: MEDLINE via PubMed, CINAHL, Cochrane Library, Web of Science, and IEEE Xplore Digital Library. Within each database, the fields title, abstract, keywords, and full text were searched. The specified search terms given in Table 1 were used identically on all databases. The documentation of the database specific search strings were documented on Excel. The search was supplemented by a free web search via Google Scholar, ResearchGate, and Springerlink. Due to the high number of hits, the reference lists of the individual studies could not be checked. The literature search was conducted in the period from May to August 2020. In order to reflect current developments and evidence in the present literature research, a supplementary search with these same requirements was conducted in January 2022.
Selection process
After duplicates were excluded, double-blinded title abstract screening and full-text screening were performed by two independent reviewers (OC, SN). For this purpose, the support tool Rayyan QCRI web app from Qatar Computing Research Institute was used [20]. Articles were selected based on the established inclusion criteria. In case of disagreement, consensus was attempted to be reached via discussion; if this was not possible, a third expert was consulted (EI, FU, WA, RI).
Data extraction
The following criteria were established in advance for data extraction. First, publication-related data were extracted: Author, publication year, title, country, and publication type. The assistive robotic systems and their possible applications were documented using the following criteria:
-
State of technological development: a distinction was made here between development, test phase (testing in the laboratory or in the field), and use in practice.
-
Setting: Based on the PCC scheme, it was documented in which nursing setting (acute inpatient, outpatient, inpatient long-term care) the assistive robotic system was used or will be used.
-
User: Based on the PCC scheme, it was documented who is the direct user of the assistive robotic system: nurse, person in need of care, relatives, other professional groups.
-
Application scenario: The application possibilities and fields of activity of the assistive robotic systems were summarized descriptively. Furthermore, it was noted how the interaction between user and robotic system is defined (e.g. via voice input or tablet).
-
Descriptive of application opportunities & research findings: The data were tabulated in a word document. The publication related data of the hits were recorded in the form of an Excel spreadsheet. The extracted data of the application areas were categorized for better overview. The categories were formed inductively using content structuring qualitative content analysis following Kuckartz [21].
Results
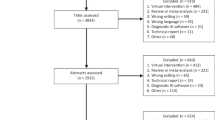
A total of 4,938 publications were included via database search and an additional 10 via hand search. After excluding duplicates, a total of 3,869 articles were subjected to title abstract screening. Of these, 112 qualified for full text screening. In the end, 47 articles were included in the analysis (Fig. 1).

PRISMA flow diagram of the search and selection process (own representation after Page et al. [22])
Publication characteristics
The 47 included publications are divided into 15 studies, 23 technical articles and nine opinion-based articles (text-opinion). The 15 studies include two systematic reviews (scoping review, systematic review), four qualitative and four quantitative studies, and five studies with a mixed-method approach. The 23 technology articles are divided into 16 conference papers, seven journal articles, and one online publication. The nine opinion-based contributions are divided into four journal articles, two edited volumes, one monograph, one conference paper, and one final project brochure.The publications originate from 25 different countries and were published between 1998 and 2022.
Overview of assistive robotic systems in nursing care
A total of 39 different assistive robotic systems were identified. Some of the robotic systems were developed for more than one setting or user group. Furthermore, there were the same systems described in different publications in different development phases. There were 55% in the testing phase and 29% of the systems in the development phase. For the clinical setting 56% of the assistive robotic systems were developed. At 48%, just under half were developed for persons in need of care. A differentiated breakdown is shown in Table 2.
Possible applications of assistive robotic systems in nursing care
Assistive robotic systems can be divided into the following six fields of applications: Information and patient data processing, assistance with activities of daily living, fetch and bring activities, telepresence and communication, monitoring, safety and navigation, and complex assistance systems.
Information and patient data processing
With the help of the assistive robotic systems (Table 3) in Song et al. [23] and Ahn et al. [24], health data and patient information are entered into a robotic system upon admission to a hospital. Individual task plans are created and the robotic system navigates the patients to the appropriate departments, including diagnostic departments, using a follow-me function. The goal is to channel requests directly upon entering the hospital and facilitate the input and processing of patient information [23, 24], but also to provide directions for visitors and patients [25]. The Terapio robot was developed for medical or nursing rounds. The robot accompanies staff during walk-throughs or rounds and enables patient data entry and progress display [26]. In Stoevesandt et al. [27], the Pepper robot was used to educate patients about magnetic resonance imaging. In addition, assistive robotic systems are used as a communication channel [28], for example in case of an emergency [29].
Assistance with activities of daily living
Assistive robotic systems to support activities of daily living (Table 4) were developed for groups of people with special care needs. Their aim is to make everyday life easier and to maintain the independence of those affected. For this purpose, the technical systems provide step-by-step instructions or provide objectes [14, 30,31,32]. The robots Ed [31, 32] and iRobot [14] were developed to provide audiovisual instructions on how to perform specific activities. The Ed robot was developed for people with dementia or mild cognitive impairment. It guides users to make tea and wash their hands [31, 32]. The NAO robot assists people with neuromuscular diseases at home by reaching for objects and providing them to the person [30].
Fetch and bring activities
The assistive robotic systems for pick-up and delivery activities could be divided into the following four sub-areas: Assistive systems for food and beverage service, for medication delivery, for contact reduction in infections, and user-related delivery services.
Food and beverage service
Assistive robotic systems for food and beverage service (Table 5) deliver meals and beverages directly to patients [29, 33,34,35]. The i-merc robotic system enables delivery of special dietary foods after input from dietitian staff [34]. As a robot for inpatient long-term care, Care-o-Bot 4 serves small snacks and drinks to residents [35].
Medication delivery services
Some assistive robotic systems deliver medications directly to patients (Table 6) [28, 29, 33, 36,37,38]. In this context, the robot in Haider et al. [33] is directly linked to the hospital pharmacy and delivers the ordered medication to the patients from there. The robot TUG is also stocked by the pharmaceutical staff in the pharmacy, but this robot delivers the order to the ward staff [39,40,41]. The WDBOT robotic system includes the complete ordering and delivery process: the required medications are ordered by the nursing staff at the corresponding ward. The robot collects the medications and is distributed to the patients together with the nursing specialist. For safety reasons, the nurse checks the medication and confirms the dispensing on a tablet [42]. Another system was developed for use in an oncology department. Its purpose was to transport radioactive materials [43].
Contact reduction for infections
The goal of these assistive robotic systems is to minimize physical contact between patients and staff, both to prevent infection and to reduce the workload of health care professionals. In light of current events, the systems were developed and tested for the clinical care of COVID-19 patients (Table 7). The automated systems are designed to deliver drinks, meals, or medicines to infected individuals [44,45,46,47]. A system was developed to deliver materials to caregivers in an isolation room [45, 46].
User- related delivery services
In addition to delivering food, beverages, or medications, assistive robotic systems are also used to deliver and transport laboratory materials, documents and further undefined objects (Table 8) [48,49,50,51,52,53]. The intelligent nursing trolley can be navigated by caregivers via a smartphone and delivers wound materials (hospital) or laundry (inpatient long-term care) to the destination, depending on the application. The goal is to reduce walking distances, thereby reducing the burden on nursing staff [35, 54,55,56]. The CASERO robot transports clean laundry to the station and takes the dirty laundry with it [10, 57, 58]
Telepresence and communication
A key feature of the systems described in Table 9 is being able to interact with people. Ienca et al. [59] describe a growing share of assistive technologies for people with dementia or cognitive impairment, which focus on social-assistive functions or telemedicine. The Giraff robot is an example of this [14, 59]. Assistive robotic systems for this application area enable robotic communication between health care professionals, caregivers, relatives and patients. For example, communication is possible via speech recognition or via input into a tablet [43, 52, 60]. The IVO & Tommy system allows communication between COVID-19 patients and caregivers. Communication was enabled by audio and touch screen functions. The aim was to protect staff from infection by reducing contact [60].
Monitoring, safety and navigation
One function of this category (Table 10) is the monitoring and documentation of patients' vital signs. The IVO & Tommy robot also has the function of reading vital signs in the patients' room via an integrated camera, where, on the other hand, the Silbot robot enables daily recording of general condition and mental state [37, 53, 60, 61]. Another safety aspect is the reminder function, such as medication reminders [53, 61, 62]. The robotic system of Arthanat et al. [63] is also capable of sending alerts to predefined individuals, such as family members, if medications have not been taken. In addition to medication reminders, the Pearl robot also handles personal hygiene reminders and meal and drink reminders [64].
The function of navigation belongs to this category, as these systems support the safe mobility of individuals. The ARNA robot accompanies patients. It serves as a walking aid and thus provides stability [49, 50]. The robotic system at Mahajan & Vidhyapathi [62] additionally performs lifting and carrying of objects, such as oxygen equipment, IVs, and drains. The target users for this system is individuals in acute inpatient settings during the postoperative period. For orientation in hospitals, robots also serve as a mobile navigation system using follow-me function [23, 38].
Complex assistance systems
Complex assistive robotic systems for assistance (Table 11) perform multiple tasks in the areas of service, communication, safety, social participation and employment. The Kompaii and RAMCIP robots assist individuals by providing information and communication functions. Kompaii can send an emergency call to a control center or remind people to take medication. RAMCIP is additionally able to record fall events. In addition to entertainment functions, such as music playback function, game function and weather service applications, there is the possibility to use video telephony. In some cases, the systems also move autonomously in space, detect obstacles, and can deliver light items such as medication or water to the person [53, 65,66,67]. The Care-o-Bot 3 robot was specifically designed for inpatient long-term care and home settings. It performs simple pick-up and drop-off services, serves drinks, speaks directly to residents, and provides entertainment through memory games, music, and poetry. In the home setting, it is possible to interface with an emergency call center, which can, for example, send an emergency call in case of a fall event [10, 53, 56,57,58].
Social and nursing science findings
The second aim of the review was to describe an overview of existing social and nursing science findings. The included publications were analyzed with regard to common research foci and summarized by content analysis. The descriptive description of the study findings is divided into integration and impact on practice and attitude and acceptance of older people towards assistive robotic systems.
Integration of technology and impact on practice
Results were summarized from four studies. Two of the studies followed a qualitative research approach and one study each followed a quantitative and mixed-method approach.
Mutlu & Forlizzi [40] used a qualitative ethnographic research design to explore the effects and changes on organizational and social-communicative factors during the use of an autonomous robot for fetch and delivery activities in an acute internal medicine ward and an obstetrics unit. The results, analyzed according to the principles of grounded theory, were able to describe differences in terms of perceived benefits, acceptance, interactions, and work-organizational changes. The differences relate in particular to the integration of the robot into the workflow and to the perception and interaction with the technical system. On the acute internal medicine ward, the robot was hardly tolerated. The integration into work processes and the resulting interruptions within the daily work routine were perceived as disturbing. In contrast, the robot could be integrated into work processes on the obstetrics ward. In the study by Summerfield et al. [41] similar results are described. Here, the use of a medication delivery robot was evaluated in an intensive care unit. The change in the medication delivery process contributed to additional activities being transferred to nurses. This contributed to decreased acceptance toward the technical system. Another problem was the technical failures of the robot, which led to further delays in the workflow and additional deliveries. The study by Arthanat et al. [63] also indicated that acceptance is based on technical aspects, such as navigability, humanoid characteristics, user interface, and adaptability. The aim of the study was to test an assistance robot with a group of relative caregivers and to collect their views on a possible integration into a home setting. The technical problems also led to a rejection attitude. Other reasons for rejection were the technical complexity and the failure to develop assistive robotic systems with a hands-on and person-oriented approach.
Furthermore, in Mutlu & Forlizzi [40] the culture-specific and the social-emotional context play a role. Due to the disease spectrum of the patients in the internal medicine ward, a special relationship between nurses and their patients could be observed. Therefore, in conjunction with a work environment characterized by stress and noise, deliveries and the attention they required were perceived as disruptive to the robot. Negative attitudes extended to physically and verbally assaulting the robot. In contrast, the nurses in the obstetrics ward described the relationship with the robot as positive, helpful, and friendly. Due to patient transports or emergencies, the internal medicine department often had a stressful work environment. Objects standing around also presented obstacles for the robot and led to collisions with staff, patients or visitors. Such incidents triggered dissatisfaction towards the robot, but this was less frequently recorded on the obstetrics ward. Regardless of the focus of care, respondents rated it critically when the robot stopped in the corridors for several minutes. This caused anxiety among nurses, as the robot was seen as a disruptive factor in the event of an emergency. Complementing this, Kirschling et al. [39] found in their study that such technical and situational difficulties reduced the utilization of the robotic system.
Attitude and acceptance of elderly people towards assisitve robotic systems
Results were summarized from two studies. One study followed a qualitative approach and the other a mixed method approach. Acceptance of and attitudes toward assistive robotic systems in home care can be described as heterogeneous. Wang et al. [32] investigated the attitudes of older people with a mild form of Alzheimer's disease and their relatives towards a assistive robotic system to support activities of daily living in the home setting. From the semi-structured interviews, different perspectives on the use can be described. A part of the elderly persons and their relatives rejected the robotic system in principle, while other persons were open to the idea but did not see a current personal need for such technological support. The negative attitude was justified from different perspectives. On the one hand, the participants did not see it as necessary, since home care was already provided by their relatives. On the other hand, the associated cost factor and the desire for human care represented a hurdle. Also, the elderly respondents from the study by Wu et al. [65] noted that they could not demonstrate an individual need for a robotic system. Rather, they described a threat of dependency from the use of robotic technologies. The resulting stigma combined with the desire for independence within care had a negative impact on acceptance. Furthermore, the potential of loneliness and dehumanization was described. There was a risk that contact with relatives would be restricted and that interpersonal relationships could suffer as a result. In contrast, Wang et al. [32] acknowledged that the use of assistive robotic systems could reduce worry, anxiety and stress, which could lead to a better relationship between relatives and care recipients. The assessment of the role that an assistive robotic system could take in such a care constellation ranges from a friend that supports social and emotional needs to a machine that enables the execution of household activities and offers little scope for personal relationships. The older persons interviewed assess the robot as a measure against social isolation and note that contact with a machine can never replace that with a human being. Building a relationship is seen as potentially possible, however, according to the interviewees, it will never be like the relationship with a human. For some older people, it was important to learn how to use new technologies so as not to become alienated from modern society. Other factors influencing acceptance were age and existing technology skills. The family caregivers had a positive attitude towards the use of assistive robotic systems. Interestingly, they assumed that the persons in need of care were also positively disposed towards the use [32, 65].
Discussion
The results of this systematic literature review show that assistive robotic systems in nursing care perform a variety of tasks in a wide range of settings. From the 47 included publications, 39 different systems could be identified. Almost one third of the systems were in the development phase and more than half in the test phase. Only 7 systems were already in use in nursing practice at the time of the search. With regard to the settings of use, it became apparent that more than half of the systems were developed for use in clinical care. The focus of the users is on persons in need of care and nursing professionals. Relatives, who often take over essential responsibilities in the care of persons in need of care, still play a subordinate role in this research field.
Assistive robotic system—a conceptual approach
A look at the literature shows that there are different categories and definitions of robotic systems in nursing. In their systematic literature review, Maalouf et al. [8] subdivide robotic systems into the categories "assistive robots" and "social assistive robots." The category "assistive robots" includes technical systems such as service, transport and surveillance robots. Robots that support food intake and personal hygiene are also classified here. Some of the application areas from the present literature research can also be classified as "assistive robots", e.g. the assumption of service activities or the possibility of monitoring. However, although both papers deal with "assistive" systems in nursing, there are still differences. For example Maalouf et al. [8] also address areas of application that involve direct and near-patient activities, such as personal care, mobility, and food intake. Considering the term "care robots", according to Hülsken-Giesler & Daxberger [68] there is no unified definition for "robots" and according to Bendel [68] therapy-related robots are close relatives and robots for sexual needs are distant acquaintances of care robots. The discussion illustrates that there are different definitions of terms and categories existing in this research field. For the concept of "assistive robotic systems for care", a definitional attempt is provided for discussion. The concept of "assistive robotic systems for care" has a clear reference to persons in need of care or persons who are integrated in direct nursing care. The aim is to support care through simple, action-oriented tasks and to promote direct person-related contact. This definition distinguishes "assistive robotic systems for care" from therapy-related systems or systems for direct patient-centered care actions.
A question of acceptance
The evaluation of the scientific evidence showed that social science studies are largely concerned with issues of acceptance toward assistive robotic systems, in addition to the question of integration into practice. The studies show that acceptance is related to the individually perceived need for care. On the one hand, assistive robotic systems may increase loneliness and dehumanization. On the other hand, it has been noted that assistive robotic systems can provide relief within care situations [32, 65]. The review paper by Peek et al. [70] explored the question of what factors influence acceptance towards technology. Again, concerns about technology, such as high cost, inefficiency, and stigma could be located. But perceived need and benefit are also influencing factors. It can be concluded that caregivers, product developers, and policy makers face a variety of factors that influence adoption. Therefore, it is necessary to integrate all stakeholders involved in the process and, in particular, persons in need of care and their relatives into the development and implementation process. Furthermore, findings on technology acceptance need to be related to issues of implementation and ethics.
Limitation
In the publications, some of the robotic systems were described briefly and exemplarily, others in great detail. Therefore it was not always possible to guarantee a detailed description of the technical systems and their possible applications in the results section. The definition of assistive robotic system chosen at the outset may have led to technical systems and relevant study results being disregarded. Despite the extensive and supplementary database research, it must be acknowledged that relevant sources of information were overlooked, as the research was only conducted in German and English. The heterogeneous and partly qualitatively poor studies focused for the most part only on technical and application-related questions, so that nursing science and care-related issues could hardly be addressed.
Conclusion
The results illustrate that the transfer of assistive robotic systems into nursing care is still in its beginnings. Nursing professionals and people in need of care are already involved in the development and testing of assistive robotic systems. This participation has to take place again in the case of implementation in a real practice environment. The literature review clarifies that relatives are hardly involved in technology development and testing. However, they are an important part of home care and should be more integrated into technology development and nursing science. This can be realized by co-creative and participatory research approaches. In this context, qualitative and especially ethnographic methods prove their worth, because in interdisciplinary projects, mutual understanding and empathy for the other party is a basic requirement for technology development and practice transfer. The identified applications for assistive robotic systems are diverse and targeted to different settings and groups of people. The assistive robotic systems are often developed to take over a highly specialized activity. This fact reduces the fear that in the near future nursing professionals and complex nursing activities can be replaced by assistive robotic systems. However, they have an impact on nursing care situations, which is why ethical and social issues must be taken into account during development. There is also a need for research to determine the impact on nursing practice, as well as facilitating and inhibiting factors for implementation. To achieve this, projects must be evaluated and become the subject of research. In addition, technology development and transfer must be discussed at the political and legal level, because the transfer of technical systems to standard care is only possible with their support.
Availability of data and materials
All data are available from the corresponding author upon reasonable request.
Abbreviations
- CINAHL:
-
Cumulative Index to Nursing and Allied Health Literature
- PRISMA:
-
Preferred reporting items for Systematic reviews and Meta-Analyses
- JBI:
-
Joanna Briggs Institute
- PCC:
-
Population, Context, Concept
- QCRI:
-
Qatar Computing Research Institute
References
Höpflinger F. Pflege und das Generationenproblem - Pflegesituationen und intergenerationelle Zusammenhänge. In: Schroeter KR, Rosenthal T, editors. Grundlagentexte Pflegewissenschaft. Soziologie der Pflege: Grundlagen, Wissensbestände und Perspektiven. Weinheim: Juventa-Verlag; 2005. p. 157–76.
Hendrich A, Chow MP, Skierczynski BA, Lu Z. A 36-hospital time and motion study: how do medical-surgical nurses spend their time? Perm J. 2008;12:25–34. https://doi.org/10.7812/tpp/08-021.
Alvarez G, Coiera E. Interruptive communication patterns in the intensive care unit ward round. Int J Med Informatics. 2005;74:791–6. https://doi.org/10.1016/j.ijmedinf.2005.03.017.
Hedberg B, Larsson US. Environmental elements affecting the decision-making process in nursing practice. J Clin Nurs. 2004;13:316–24. https://doi.org/10.1046/j.1365-2702.2003.00879.x.
Braeske G, Haaß F, Meyer-Rötz SH, Pflug C. Digitalisierung in der ambulanten Pflege - Chancen und Hemmnisse. Kurzfassung: Abschlussbericht für das Bundesministerium für Wirtschaft und Energie (BMWi). 2017. https://www.bmwi.de/Redaktion/DE/Publikationen/Studien/digitalisierung-in-der-ambulanten-pflege-chancen-und-hemmnisse.pdf?__blob=publicationFile&v=12.Accessed 10 Jan 2022.
Bundesministerium für Gesundheit. ePflege. Informations- und Kommunikationstechnologie für die Pflege: Studie durchgeführt von Roland Berger GmbH, Deutsches Institut für angewandte Pflegeforschung e. V. und Philosophisch-Theologische Hochschule Vallendar. 2017. https://www.dip.de/fileadmin/data/pdf/projekte_DIP-Institut/BMG_ePflege_Abschlussbericht_final.pdf. Accessed 20 Nov 2022.
Depner D, Hülsken-Giesler M. Robotik in der Pflege - Eckpunkte für eine prospektive ethische Bewertung in der Langzeitpflege. Zeitschrift für medizinische Ethik. 2017;63:51–62. https://doi.org/10.14623/zfme.2017.1.51-62.
Maalouf N, Sidaoui A, Elhajj IH, Asmar D. Robotics in nursing: a scoping review. J Nurs Scholarsh. 2018;50:590–600. https://doi.org/10.1111/jnu.12424.
Schraft RD, Volz H. Serviceroboter: Innovative Technik in Dienstleistung und Versorgung. Berlin, Heidelberg: Springer-Verlag; 1996. https://doi.org/10.1007/978-3-642-79809-2.
Graf B, Heyer T, Klein B, Wallhoff F. Servicerobotik für den demografischen Wandel: Mögliche Einsatzfelder und aktueller Entwicklungsstand. Bundesgesundheitsblatt Gesundheitsforschung Gesundheitsschutz. 2013;56:1145–52. https://doi.org/10.1007/s00103-013-1755-9.
Christoforou EG, Avgousti S, Ramdani N, Novales C, Panayides AS. The upcoming role for nursing and assistive robotics: opportunities and challenges ahead. Front Digit Health. 2020;2:585656. https://doi.org/10.3389/fdgth.2020.585656.
Weiß C. Technikentwicklung in der professionellen und informellen Pflege. In: Bundesanstalt für Arbeitsschutz und Arbeitsmedizin (BAuA), editor. Intelligente Technik in der beruflichen Pflege. Von den Chancen und Risiken einer Pflege 4.0. 2015. p. 6–9. https://inqa.de/SharedDocs/downloads/webshop/intelligente-technik-in-der-beruflichen-pflege?__blob=publicationFile. Accessed 22 Nov 2022.
Graf B. Assistenzroboter für die Pflege: Verfügbare Produkte und Forschungsfelder [Assistive robots for nursing care: available products and research fields]. Z Gerontol Geriatr. 2020;53:608–14. https://doi.org/10.1007/s00391-020-01782-7.
Buhtz C, Paulicke D, Hirt J, Schwarz K, Stoevesandt D, Meyer G, Jahn P. Robotic systems for care at home: a scoping review. Z Evid Fortbild Qual Gesundhwes. 2018;137–138:1–8. https://doi.org/10.1016/j.zefq.2018.09.003.
Bedaf S, Gelderblom GJ, De Witte L. Overview and categorization of robots supporting independent living of elderly people: what activities do they support and how far have they developed. Assist Technol. 2015;27:88–100. https://doi.org/10.1080/10400435.2014.978916.
Sriram V, Jenkinson C, Peters M. Informal carers’ experience of assistive technology use in dementia care at home: a systematic review. BMC Geriatr. 2019;19:1–25. https://doi.org/10.1186/s12877-019-1169-0.
Elm E, von Schreiber G, Haupt CC. Methodische Anleitung für scoping reviews (JBI-Methodologie). Z Evid Fortbild Qual Gesundhwes. 2019;143:1–7. https://doi.org/10.1016/j.zefq.2019.05.004.
Tricco AC, Lillie E, Zarin W, O’Brien KK, Colquhoun H, Levac D, Moher D, Peters MDJ, Horsley T, Weeks L, Hempel S, Akl EA, Chang C, McGowan J, Stewart L, Hartling L, Aldcroft A, Wilson MG, Garritty C, Lewin S, Godfrey CM, Macdonald MT, Langlois EV, Soares-Weiser K, Moriarty J, Clifford T, Tunçalp Ö, Straus SE. PRISMA extension for scoping Reviews (PRISMA-ScR): checklist and explanation. Ann Intern Med. 2018;169:467–73. https://doi.org/10.7326/M18-0850.
Nordhausen T, Hirt J. Manual zur Literaturrecherche in Fachdatenbanken: RefHunter (Version 4.0). 2020. https://refhunter.eu/files/2020/01/Manual_4.0_VFinal.pdf. Accessed 19 Apr 2022.
Ouzzani M, Hammady H, Fedorowicz Z, Elmagarmid A. Rayyan-a web and mobile app for systematic reviews. Systematic Review. 2016;5:1–10. https://doi.org/10.1186/s13643-016-0384-4.
Kuckartz U. Qualitative inhaltsanalyse: methoden, praxis, computerunterstützung. 4th ed. Weinheim, Basel: Beltz Juventa; 2018.
Page MJ, McKenzie JE, Bossuyt PM, Boutron I, Hoffmann TC, Mulrow CD, et al. The PRISMA 2020 statement: an updated guideline for reporting systematic reviews. BMJ. 2021;372:n71. https://doi.org/10.1136/bmj.n71.
Song KT, Chiu YH, Song SH, Zinchenko K. Scheduling and control of a cloud robot for reception and guidance. In: International Automatic Control Conference (CACS); 12–15 November 2017. Pingtun: IEEE; 2017. p. 1–6. https://doi.org/10.1109/CACS.2017.8284263.
Ahn HS, Lee MH, MacDonald BA. Healthcare robot systems for a hospital environment: CareBot and ReceptionBot. In: 24th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN); 31 August – 4 September 2015. Kobe: IEEE; 2015. p. 571–6.
Ma AC, Meng Z, Ding X. Performance review of intelligent guidance robot at the outpatient clinic setting. Cureus. 2021;13:e16840. https://doi.org/10.7759/cureus.16840.
Tasaki R, Kitazaki M, Miura J, Terashima K. Prototype design of medical round supporting robot “Terapio.” In: IEEE International Conference on Robotics and Automation (ICRA); 26–30 May 2015. Seattle: IEEE; 2015. p. 829–34. https://doi.org/10.1109/ICRA.2015.7139274.
Stoevesandt D, Jahn P, Watzke S, Wohlgemuth WA, Behr D, Buhtz C, Faber I, Enger S, Schwarz K, Brill R. Comparison of acceptance and knowledge transfer in patient information before an MRI exam administered by humanoid robot versus a tablet computer: a randomized controlled study. Rofo. 2021;193:947–54. https://doi.org/10.1055/a-1382-8482. Fortschritte auf dem Gebiet der Röntgenstrahlen und der Nuklearmedizin.
Narayanan KL, Krishnan RS, Son LH, Tung NT, Julie EG, Robinson YH, Kumar R, Gerogiannis VC. Fuzzy guided autonomous nursing robot through wireless beacon network. Multimed Tools Appl. 2022;81:3297–325. https://doi.org/10.1007/s11042-021-11264-6.
Pranathi BS, Nair A, Anushree CS, Chandar TS. Sahayantra - A patient assistance robot. In: 2020 11th International Conference on Computing, Communication and Networking Technologies (ICCCNT); 01–03 July 2020. IEEE: Kharagpur; 2020. p. 1–6. https://doi.org/10.1109/ICCCNT49239.2020.9225444.
Zhang Y, Gao Q, Song Y, Wang Z. Implementation of an SSVEP-based intelligent home service robot system. Technol Health Care. 2021;29:541–56. https://doi.org/10.3233/THC-202442.
Begum M, Wang R, Huq R, Mihailidis A. Performance of daily activities by older adults with dementia: The role of an assistive robot. In: IEEE 13th International Conference on Rehabilitation Robotics (ICORR), 24–26 June 2013. Seattle: IEEE; 2013. p. 1–8. https://doi.org/10.1109/ICORR.2013.6650405.
Wang RH, Sudhama A, Begum M, Huq R, Mihailidis A. Robots to assist daily activities: views of older adults with Alzheimer’s disease and their caregivers. Int Psychogeriatr. 2017;29:67–79. https://doi.org/10.1017/S1041610216001435.
Haider I I, Khan KB, Haider MA, Saeed A, Nisar K. Automated Robotic System for Assistance of Isolated Patients of Coronavirus (COVID-19). In: 2020 IEEE 23rd International Multitopic Conference (INMIC); 05–07 November 2020. Bahawalpur: IEEE; 2020. p. 1–6. https://doi.org/10.1109/INMIC50486.2020.9318124.
Carreira F, Canas T, Silva A, Cardeira C. i-Merc: A Mobile Robot to Deliver Meals inside Health Services. In: 2006 IEEE Conference on Robotics, Automation and Mechatronics; 01–03 June 2006. Bangkok: IEEE; 2006. p. 1–8. https://doi.org/10.1109/RAMECH.2006.252651.
Graf B. Neue Servicerobotik-Lösungen für die stationäre Pflege. Pflegezeitschrift. 2019;72:20–3. https://doi.org/10.1007/s41906-018-0002-2.
Hasan MF, Rahaman I, Sayem MS, Hasan MM, Tamal BK, Rubel MAR. Designing of Cost-Effective Human Assistive Robot and Performance Enhancement. In: 2020 11th International Conference on Computing, Communication and Networking Technologies (ICCCNT); 01–03 July 2020. Kharagpur: IEEE; 2020. p. 1–5. https://doi.org/10.1109/ICCCNT49239.2020.9225599.
Antony M, Parameswaran M, Mathew N, V.S S, Joseph J, Jacob CM. Design and Implementation of Automatic Guided Vehicle for Hospital Application. In: 2020 5th International Conference on Communication and Electronics Systems (ICCES); 10–12 June 2020. 2020. p. 1031–6. https://doi.org/10.1109/ICCES48766.2020.9137867.
Chien J-C, Dang Z-Y, Lee J-D. Navigating a service robot for indoor complex environments. Appl Sci. 2019;9:1–16. https://doi.org/10.3390/app9030491.
Kirschling TE, Rough SS, Ludwig BC. Determining the feasibility of robotic courier medication delivery in a hospital setting. Am J Health Syst Pharm. 2009;66:1754–62. https://doi.org/10.2146/ajhp080184.
Mutlu B, Forlizzi J. Robots in organizations: The role of workflow, social, and environmental factors in human-robot interaction. In: Living with robots: Proceedings of the Third ACM/IEEE Conference on Human-Robot Interaction; 12–15 March 2008. Amsterdam: HRI; 2008. p. 287–94. https://doi.org/10.1145/1349822.1349860.
Summerfield MR, Seagull FJ, Vaidya N, Xiao Y. Use of pharmacy delivery robots in intensive care units. Am J Health Syst Pharm. 2011;68:77–83. https://doi.org/10.2146/ajhp100012.
Dasanayake DMHT, Gunasekara PS, Wickramasinghe HD, Fernando S, Kulasekera AL. Automated Hospital Ward Management System Interacting with Mobile Robot Platform WDBOT. In: Proceedings of 2018 IEEE International Conference on Mechatronics and Automation (ICMA); 05–08 August 2018. Changchun: IEEE; 2018. p. 557–62. https://doi.org/10.1109/ICMA.2018.8484356.
Dallal AH, Derbala AS, Taher MF. A mobile robot for hospitals controlled using WLAN. In: 2012 Cairo International Biomedical Engineering Conference (CIBEC); 20–22 December 2012. Gizeh: IEEE; 2012. p. 100–3. https://doi.org/10.1109/CIBEC.2012.6473322.
Rusdi JF, Nurhayati A, Gusdevi H, Fathulloh MI, Priyono A, Hardi R. IoT-based Covid-19 Patient Service Robot Design. In: 2021 3rd International Conference on Cybernetics and Intelligent System (ICORIS); 25–26 October 2021. Makasar: IEEE; 2021. p. 1–6. https://doi.org/10.1109/ICORIS52787.2021.9649461.
Thamrongaphichartkul K, Worrasittichai N, Prayongrak T, Vongbunyong S. A framework of IoT platform for autonomous mobile robot in hospital logistics applications. In: 2020 15th International Joint Symposium on Artificial Intelligence and Natural Language Processing (iSAI-NLP); 18–20 November 202. Bangkok: IEEE; 2020. p. 1–6. https://doi.org/10.1109/iSAI-NLP51646.2020.9376823.
Vongbunyong S, Tripathi SP, Thamrongaphichartkul K, Worrasittichai N, Takutruea A, Prayongrak T. Simulation of autonomous mobile robot system for food delivery in In-patient ward with unity. In: 2020 15th International Joint Symposium on Artificial Intelligence and Natural Language Processing (iSAI-NLP); 18–20 November 2020. Bangkok: IEEE; 2020. p. 1–6. https://doi.org/10.1109/iSAI-NLP51646.2020.9376784.
Dadi H, Al-Haidous M, Radwi N, Ismail L. Service Robots in Hospitals to Reduce Spreading of COVID-19. In: 2021 Fifth World Conference on Smart Trends in Systems Security and Sustainability (WorldS4); 29-30 July 2021. London: IEEE; 2021. p. 212–7. https://doi.org/10.1109/WorldS451998.2021.9514018.
Ettelt E, Furtwangler R, Hanebeck UD, Schmidt G. Design issues of a semi-autonomous robotic assistant for the health care environment. J Intell Rob Syst. 1998;22:191–209. https://doi.org/10.1023/A:1008082024638.
Abubakar S, Das SK, Robinson C, Saadatzi MN, Logsdon MC, Mitchell H, Chlebowy D, Popa DO. ARNA, a Service robot for Nursing Assistance: System Overview and User Acceptability. In: 2020 IEEE 16th International Conference on Automation Science and Engineering (CASE); 20–21 August 2020. Hong Kong (online): IEEE; 2020. p. 1408–14. https://doi.org/10.1109/CASE48305.2020.9216845.
Saadatzi MN, Logsdon MC, Abubakar S, Das S, Jankoski P, Mitchell H, Chlebowy D, Popa DO. Acceptability of using a robotic nursing assistant in health care environments: experimental pilot study. J Med Internet Res. 2020;22:e17509. https://doi.org/10.2196/17509.
Yamamoto T, Terada K, Ochiai A, Saito F, Asahara Y, Murase K. Development of human support robot as the research platform of a domestic mobile manipulator. Robomech J. 2019;6:1–15. https://doi.org/10.1186/s40648-019-0132-3.
Früh M, Gasser A. Erfahrungen aus dem Einsatz von Pflegerobotern für Menschen im Alter. In: Bendel O, editor. Pflegeroboter. Wiesbaden: Springer Gabler; 2018. p. 37–62. https://doi.org/10.1007/978-3-658-22698-5.
Klein B, Graf B, Schlömer IF, Roßberg H, Röhricht K, Baumgarten S. Robotik in der Gesundheitswirtschaft. In: Einsatzfelder und Potenziale. Heidelberg: medhochzwei; 2018.
Graf B, King RS, Schiller C, Roessner A. Development of an intelligent care cart and new supplies concepts for care homes and hospitals. In: Proceedings of ISR 2016: 47st International Symposium on Robotics; 21–22 June 2016. Munich: VDE; 2016. p. 1–6.
Graf B. Servicerobotik für die Pflege: Forschungsprojekt “SeRoDi” mit Abschlussergebnissen. Heilberufe. 2018;70:44–5.
Schiller C, Graf B, Fischbach J, Baumgarten S, Bläsing D, Strunck S, Fredl-Maurer R, Filitz G. Servicerobotik bei personenbezogenen Dienstleistungen: Abschlussbroschüre. 2019. https://www.ipa.fraunhofer.de/content/dam/ipa/de/documents/Projekte/Forschungsprojekte/Abschlussbrosch%C3%BCre%20Servicerobotik%20in%20der%20Pflege.pdf. Accessed 01 Apr 2022.
Graf B, Jacobs T. “Er hat etwas angenehm Serviceartiges”: Roboter im Pflegeheim. Pflegezeitschrift Wissen Manag. 2011;64:646–9.
Graf B, Jacobs T, Luz J, Compagna D, Derpmann S, Shire K. Einsatz und Pilotierung mobiler Serviceroboter zur Unterstützung von Dienstleistungen in der stationären Altenpflege. In: Shire KA, Leimeister JM, editors. Technologiegestützte Dienstleistungsinnovation in der Gesundheitswirtschaft. Wiesbaden: Gabler Verlag, Springer Fachmedien; 2012. p. 265–88. https://doi.org/10.1007/978-3-8349-3506-9_11.
Ienca M, Fabrice J, Elger B, Caon M, Scoccia Pappagallo A, Kressig RW, Wangmo T. Intelligent assistive technology for Alzheimer’s disease and other dementias: a systematic review. J Alzheimers Dis. 2017;56:1301–40. https://doi.org/10.3233/JAD-161037.
Bartosiak M, Bonelli G, Maffioli LS, Palaoro U, Dentali F, Poggialini G, Pagliarin F, Denicolai S, Previtali P. Advanced robotics as a support in healthcare organizational response: a COVID-19 pandemic case study. Healthc Manag Forum. 2022;35:11–6. https://doi.org/10.1177/08404704211042467.
Law M, Sutherland C, Ahn HS, MacDonald BA, Peri K, Johanson DL, Vajsakovic DS, Kerse N, Broadbent E. Developing assistive robots for people with mild cognitive impairment and mild dementia: a qualitative study with older adults and experts in aged care. BMJ Open. 2019;9:e031937. https://doi.org/10.1136/bmjopen-2019-031937.
Mahajan S, Vidhyapathi CM. Design of a medical assistant robot. In: 2nd IEEE International Conference on Recent Trends in Electronics, Informations & Communication Technology (RTEICT); 19–20 May 2017. Bangalore: IEEE; 2017. p. 877–81. https://doi.org/10.1109/RTEICT.2017.8256723.
Arthanat S, Begum M, Gu T, LaRoche DP, Xu D, Zhang N. Caregiver perspectives on a smart home-based socially assistive robot for individuals with Alzheimer’s disease and related dementia. Disabil Rehabil Assist Technol. 2020;15:789–98. https://doi.org/10.1080/17483107.2020.1753831.
Pineau J, Montemerlo M, Pollack M, Roy N, Thrun S. Towards robotic assistants in nursing homes: challenges and results. Robot Auton Syst. 2003;42:271–81. https://doi.org/10.1016/S0921-8890(02)00381-0.
Wu YH, Wrobel J, Cornuet M, Kerhervé H, Damnée S, Rigaud AS. Acceptance of an assistive robot in older adults: a mixed-method study of human-robot interaction over a 1-month period in the Living Lab setting. Clin Interv Aging. 2014;9:801–11. https://doi.org/10.2147/CIA.S56435.
Zsiga K, Tóth A, Pilissy T, Péter O, Dénes Z, Fazekas G. Evaluation of a companion robot based on field tests with single older adults in their homes. Assist Technol. 2018;30:259–66. https://doi.org/10.1080/10400435.2017.1322158.
Gerlowska J, Skrobas U, Grabowska-Aleksandrowicz K, Korchut A, Szklener S, Szczesniak-Stanczyk D, Tzovaras D, Rejdak K. Assessment of perceived attractiveness, usability, and societal impact of a multimodal robotic assistant for aging patients with memory impairments. Front Neurol. 2018;9:1–13. https://doi.org/10.3389/fneur.2018.00392.
Hülsken-Giesler M, Daxberger S. Robotik in der Pflege aus pflegewissenschaftlicher Perspektive. In: Bendel O, editor. Pflegeroboter. Wiesbaden: Springer Gabler; 2018. p. 125–39. https://doi.org/10.1007/978-3-658-22698-5.
Bendel O, editor. Pflegeroboter. Wiesbaden: Springer Gabler; 2018.
Peek ST, Wouters EJ, van Hoof J, Luijkx KG, Boeije HR, Vrijhoef HJ. Factors influencing acceptance of technology for aging in place: a systematic review. Int J Med Inform. 2014;83:235–48. https://doi.org/10.1016/j.ijmedinf.2014.01.004.
Acknowledgements
None.
Funding
Open Access funding enabled and organized by Projekt DEAL. The funding program „Robotics in Care“ by the German Federal Ministry of Education and Research funds the REsPonSe project and study. The third-party funds comprise a total amount of 1.549.860 Euros for the entire project (02/2020–01/2023). The project has the funding code 16SV8416.
Author information
Authors and Affiliations
Contributions
OC and SN developed the research protocol and conducted the database search and data extraction. OC, SN, WA and RI carried out data analysis and interpretation. MKA, FU and EI provided methodological advice and decision support for inclusion and exclusion of publications. OC wrote the manuscript. All authors critically revised the draft and contributed to the final writing of the paper. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Ethic approval and consent to participate
Not applicable.
Consent for publication
Not applicable.
Competing interests
The authors declare that they have no competing interests.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/. The Creative Commons Public Domain Dedication waiver (http://creativecommons.org/publicdomain/zero/1.0/) applies to the data made available in this article, unless otherwise stated in a credit line to the data.
About this article

Cite this article
Ohneberg, C., Stöbich, N., Warmbein, A. et al. Assistive robotic systems in nursing care: a scoping review. BMC Nurs 22, 72 (2023). https://doi.org/10.1186/s12912-023-01230-y
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s12912-023-01230-y