
Abstract
Background
Gait disorders and as a consequence, robotic rehabilitation techniques are becoming increasingly prevalent as the population ages. In the area of rehabilitation robotics, using lightweight single hip joint exoskeletons are of significance. Considering no prior systematic review article on clinical outcomes, we aim to systematically review powered hip exoskeletons in terms of gait parameters and metabolic expenditure effects.
Methods
Three databases of PubMed, Scopus, and Web of science were searched for clinical articles comparing outcomes of gait rehabilitation using hip motorized exoskeleton with conventional methods, on patients with gait disorder or healthy individuals. Of total number of 37 reviewed articles, 14 trials were quantitatively analyzed. Analyses performed in terms of gait spatiotemporal parameters like speed (self-speed and maximum speed), step length, stride length, cadence, and oxygen consumption.
Results
Improved clinical outcomes of gait spatiotemporal parameters with hip joint exoskeletons are what our review’s findings show. In terms of gait values, meta-analysis indicates that rehabilitation with single hip joint exoskeleton enhanced parameters of maximum speed by 0.13 m/s (0.10–0.17) and step length by 0.06 m (0.05–0.07). For the remaining investigated gait parameters, no statistically significant difference was observed. Regarding metabolic parameters, oxygen consumption was lower in individuals treated with hip exoskeleton (− 1.23 ml/min/kg; range − 2.13 to − 0.32).
Conclusion
Although the analysis demonstrated improvement with just specific gait measures utilizing powered hip exoskeletons, the lack of improvement in all parameters is likely caused by the high patient condition heterogeneity among the evaluated articles. We also noted in patients who rehabilitated with the hip exoskeleton, the oxygen cost was lower. More randomized controlled trials are needed to verify both the short- and long-term clinical outcomes, including patient-reported measures.
Level of evidence
Level I (systematic review and meta-analysis).
Similar content being viewed by others


Introduction
Gait disorders become more common as population ages, increasing from 30% of adults 60 years and older to more than 60% of people over the age of 80 [1, 2]. Gait disorders may originate from neurologic problems (e.g. sensory or motor impairments like stroke or spinal cord injuries), orthopedic disorders (e.g. osteoarthritis or skeletal deformities) or other general medical conditions (e.g. cardiovascular diseases, pulmonary diseases, obesity or psychiatric disorders) [3,4,5]. Gait and balance problems contribute to poor quality of life and increased morbidity and mortality in the elderly [2]. Although there are medical and surgical managements for gait disorders, ambulatory devices are the only option left in most cases [6], and previous studies supported that continues locomotor activity improves patients’ condition [7, 8].
Exoskeletons are external devices worn with the aim of rehabilitation or replacement for lost physical functions and integrate the human intelligence with robotic power [9]. In the past decade, several lower limb exoskeletons (LLEs) have been developed such as ReWalk [10], Honda Walking Assist® (HWA) [11], Stride Management Assist (SMA), Gait Enhancing Mechatronic System (GEMS), Hybrid Assistive Limb (HAL) [12] and Vanderbilt [13]. However, there is still a lot to do in development and application of LEEs, such as control, actuators, and humane-machine interface (HMI) optimization. By providing almost consistent torque profiles throughout the rehabilitation process, which cannot be accomplished by manual assistance or verbal feedback from the physiotherapist, powered exoskeletons help increase treatment reproducibility. Additionally, by integrating individualized parameters, the device power can be adjusted to target particular gait impairments in a regulated manner. Using these devices relieves therapists of huge burden while providing various personalized task-specific practice in novel dynamic environments, and they allow continuous monitoring of patients’ performance and progression [14]. The employment of light single-joint exoskeletons for gait training has recently become a trend in the field of rehabilitation robotics [15]. Motorized hip exoskeletons appear to favorably enhance the rehabilitation of stroke survivors and other patients with restricted movement capacities by enhancing gait spatiotemporal parameters, metabolic economy, and biomechanical quality [16, 17]. Additionally, patients with neurological conditions brought on by disorders or trauma like a stroke or spinal cord injury frequently have weak muscles, which could result in inadequate force or torque at the hip joints during limb movements [18], specially that due to the different muscle properties, the hip joint has a higher metabolic expenditure for the generation of equivalent mechanical joint power [19]. Fully functioning human walking lowers the risk of strokes and coronary heart disease, improving both psychological and physical well-being [20].
Today, the exoskeletons’ technology progress have been studied and reviewed comprehensively [21,22,23]. Regarding powered hip robots, there are some reviews in terms of design and control [22, 24]. However, we found no comprehensive review in terms of clinical gait outcomes with powered single hip joint exoskeletons (PSHJE). For a better comprehension of this technology practical applications, we extensively summarize the 1) clinical outcomes including gait spatiotemporal parameters and 2) metabolic cost on walking-assist hip exoskeletons in this systematic review.
Materials and methods
Protocol
This systematic review and meta-analysis was conducted based on the Preferred Reporting Items for Systematic Reviews and Meta-Analysis: the PRISMA Statement [25].
Searching strategy
An electronic search was conducted in the databases PubMed/MEDLINE, Scopus and ISI Web of Science from inception until August 31th, 2022. The search statement was: ((“robot*” OR “exoskelet*” OR “automatic orthos*” OR “powered orthos*”) AND (“hip” OR “coxa*” OR “acetabul*”) AND (“gait” OR “walk” OR “rehab*” OR “mobil*”). The references of retrieved articles were also checked to find possibly relevant studies. We refined our search by available English language abstract and article document type. Other filters were not applied. Grey literature was not checked in this study.
Eligibility criteria and study selection
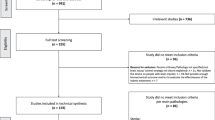
The present systematic review screened all studies that met the PICOD protocol requirements: P (Problem): gait disorder; I (Intervention): rehabilitation with PSHJE; C (Comparison): conventional rehabilitation; O (Outcomes): gait spatiotemporal parameters; and D (design): controlled or pre-post clinical trial. All the search results were imported to Endnote X9 citation manager and duplicate studies were removed. Two reviewers (M. D, M. Gh) independently screened the titles and abstracts of studies to select relevant ones. Disagreements were resolved by consensus. Studies evaluating the outcomes of using powered single hip joint exoskeleton (PSHJE) robots (Fig. 1) in patients with gait disorders (stroke, amputees, joint arthroplasty, elderly, cerebral palsy, etc.) were included in this review. All abstracts, review articles, case-reports, case-series, letters to editors, prototypes and animal studies were excluded. Additional exclusion criteria were studies dealing with powered exoskeletons on joints other than hip or whole lower body robots, passive hip exoskeletons, and non-clinical studies (Supplementary Figure). Whenever several studies were published from a trial with the same population, only the results and data of the last study (provided that it has the largest sample size, mentions accurate and complete information of patients in depth, and a complete/correct reporting of the outcomes) would meet the criteria for our systematic review.

The powered single hip joint exoskeleton (PSHJE) robots developed in FUM CARE, named HEXA. The robot is portable and weighs less than 4 kg
Data extraction and quality assessment
Three reviewers separately collected data from full texts of included studies using a pre-designed Excel form. Results were compared and double checked by the same reviewers. The data extracted included: author, year, study design, sample size, disorder, mean age, sex ratio, disease type, robot name, self-speed (self-selected comfortable speed), max speed, cadence, step length, stride length and metabolic cost. The methodological quality and validity of each included study was evaluated using the JBI critical appraisal checklists for clinical trials and single group studies (Tables 1 and 2).
Statistical analysis
Our primary focus are clinical outcomes in terms of gait spatiotemporal parameters. As the secondary outcomes we reviewed metabolic and oxygen cost, hip joint angle, and muscle activity. Forest plots were depicted to assess for heterogeneity and calculate the pooled weighted mean difference (WMD) with corresponding 95% confidence intervals for visual inspection across studies. Due to conceptual heterogeneity, a random-effects meta-analysis was conducted to account for the heterogeneity of the study populations. Pooled estimates with their corresponding 95% CIs were calculated using inverse-variance weights methods [26]. The I2 statistics was used to assess the heterogeneity across studies (I2 = 0% indicates no observed heterogeneity and I2 ≥ 50% indicates substantial heterogeneity). Cochran’s Q statistic was also used to analyze the statistical significance of heterogeneity [27]. Sensitivity analysis was performed to determine which study (if any) had the largest impact on the heterogeneity and to assess the robustness of pooled estimates. WMD was plotted against the inverse of the square of the standard error. All statistical tests were two-tailed, and the significance level was set at less than 0.05 for all, except for the heterogeneity test. Statistical analyses were performed using Stata version 17.0 (Stata Corp., College Station, Texas, USA).
Results
Study characteristics
Finally, a systematic review and meta-analysis of 13 comparative clinical research, including 7 clinical trials and 7 single group trials was conducted. Four publications assessed GEMS, four SMA, two HWA, and two Active Pelvis Orthosis (APO). Each of the following was examined in a single paper: ALEX II exoskeleton, HAL lumbar type, and Robotic Assisted Rehabilitation Trainer (RART). One study focused on pediatric patients [28], while others investigated adults and the elderly (Table 3).
Qualitative results
Clinical outcomes including gait spatiotemporal parameters (Table 4)
When rehabilitating with Honda Walking Assist (HWA), patients with walking difficulty showed augmented motivation as measured by Intrinsic Motivation Inventory (IMI) [29]. Implementing on 50 chronic stroke patients, powered hip exoskeleton could enhance gait clinical outcomes (endurance (P .033), balance (P 0.036), step count (P 0.013) etc.), compared with the functional training [17]. Patient-reported outcomes of balance confidence and falls efficacy also improved with hip exoskeleton [17]. Assistance timing increases, step length, cadence, and walk ratio (i.e. step length/cadence ratio) all increase with Gait Enhancing Mechatronic System (GEMS) [30]. Healthy elderly patients showed no difference in stair climbing cadence while using GEMS or not [31]. Studying hip exoskeleton in comparison with treadmill on children with cerebral palsy (CP), showed notable increase in walking speed (P < 0.05) [28]. In one patient with spinal cord injury, powered hip exoskeleton increased walking speed (0.24 to 0.31 m/s), step length (0.38 to 0.41 m), cadence (37.5 to 44.81 step/min), and decreased compensatory movements, when compared with Isocentric Reciprocating Gait Orthosis (IRGO) [32]. With relation to integrating orthotics along with functional electrical stimulation (FES), reciprocal gait orthosis (RGO) with a variable constraint hip mechanism (VCHM) compared with IRGO on five able-bodied individuals, and stated that when hip controller was active, hip kinematics was more similar to normal hip joints (ICC = 0.96). There was no difference in terms of step length, but IRGO resulted in walking speed closer to the norms [33]. Compared to the IRGO (intraclass correlation coefficient = .68), the VCHM with controller active enabled the production of joint moments that were closer to the normal values (ICC = 0.80) [33]. During a randomized trial, the robotic trainer to control hip motions, improved gait parameters of speed, cadence, and balance in hemiplegic patients [34]. Koseki et al. conducted three studies on Honda Walking Assistive device® (HWA) and showed increased gait parameters (speed, step length and cadence) in one subject with hip osteoarthritis and two subjects with transfemoral amputation [11, 35]. They also noted early gait improvement when waring HWA during a clinical trial and a case report on total knee arthroplasty patients [36, 37]. HWA outcomes were similar on one patient with spinal cord injury [38]. Elderly people in the GEMS group showed enhanced gait performance, reduced muscle effort, and lower metabolic expenditure [39, 40], as well as patients with chronic stroke patients [41]. Miura et al. reported enhanced balancing function variables, despite the fact that mobility function metrics like the 10MWT did not significantly improve after Hybrid Assistive Limb (HAL) physiotherapy in patients with locomotive syndrome [42]. Unlike control group, applying stride management assist (SMA) with exoskeleton resulted in notable improvement post-training in terms of maximum gait speed, paralysis-side step length, symmetry, and cadence in subacute stroke [43]. At various times, SMA group showed further advancements across gait metrics [16].
Muscle activity
When adding hip joint paretic side corrective force to the robotic treadmill on 15 post stroke subjects, increased muscle activity and more symmetric hip movements were observed [44]. Corticomotor excitability (CME) corresponding to rectus femoris muscle in patients with chronic stroke augmented with hip exoskeleton compared with functional training (P 0.010). primary sensorimotor cortex (SMC) showed augmented activation in patients with stroke, as revealed by infrared spectroscopy [45].
Hip joint angles
Comparing powered hip exoskeleton with Isocentric Reciprocating Gait Orthosis (IRGO), hip angles were comparable to those shown by normal walking motions while wearing this orthosis, but reduced compared to normal gait with both orthoses [32]. The VCHM with controller active enabled greater hip flexion compared to the IRGO and provided smooth control of the hip joints via context-dependent coupling [33]. A case report study revealed that pneumatic artificial muscle (PAM) powered hip orthosis, operated via a voluntary activation algorithm relies on the hip joint’s angular characteristics, could be adjusted to provide a satisfying and comfortable application during the gait cycle and improved left step transposition on the patient with polio [46]. Peak hip and knee flexion angles improved (reduced) with robotic trainer to control hip motions [34]. Limb symmetry and maximum hip angle associate with hip exoskeleton assistance and timing in children with spastic CP [28]. Maximum hip flexion decreased from 45.7 to 34.4 with HWA in a patient underwent total hip arthroplasty (THA) [35] but increased from 24 to 30 in two amputees [11]. There is the report stating powered or unpowered conditions when using hip exoskeleton are similar in terms of hip moment pattern and despite having different hip joint angles for a particular walking pace, people follow similar joint moment patterns when walking [47].
Metabolic
Physiologic cost index (PCI) decreased 20.5% while wearing hip exoskeleton by an above knee amputee (P < 0.01) [48]. The association between assistant timing of GEMS hip exoskeleton and metabolic cost has shown maximum 21% reduction at 0% assistance timing compared with no exoskeleton walking [30]. GEMS was studied on healthy elderly individuals walking stairs and revealed notable decrease in oxygen consumption per unit mass (P 0.013), metabolic power per unit mass (P 0.001) and metabolic equivalents (P < 0.05) values [31]. When assisting hip flexion and extension of healthy individuals, oxygen consumption and heart rate reduced [49]. At a self-selected speed, GEMS resulted in a 7 and 6.6% reduction in oxygen consumption per unit and energy expenditure, respectively (p 0.05) [39], and the net cardiopulmonary metabolic energy cost was also decreased by 14.71% following the intervention in patients with chronic stroke [41]. The motorized hip exoskeleton’s interface design optimization and its effect on metabolic cost has been studied, recently [50]. Studying the Active Pelvis Orthosis (APO) on elderly, oxygen (4.24 ± 2.57%) and metabolic (− 26.6 ± 16.1%) consumption reduced post-training notably more than control group [51]. On patients with lower limb amputation, motorized hip exoskeleton could reduce 15.6% of metabolic cost [52]. When studying the effect of placing actuators on lower extremity joints, the motors at the hip were mostly responsible for the lowering of metabolic costs [53]. Hip exoskeleton from Samsung GEMSv2 decreased metabolic cost by 13.5, 15.5 and 9.8%. (31.9, 51.6 and 45.6 W) at, 0, 5, and 10% surface gradient, respectively [54]. Hip flexion and extension metabolic costs were lowered by 9.7 and 10.3%, respectively, in the optimized powered condition compared to the unpowered condition [55].
Quantitative results (meta-analysis)
Gait self-speed (m/s)
Analyzing six studies, gait self -speed increased 0.07 m/s (− 0.01–0.15) on average, among patients rehabilitated by PSHJE (Fig. 2A). Sensitivity analysis showed the mean change of gait self -speed was consistent (range of summary WMDs: 0.05–0.09), indicating that the meta-analysis model was robust. I square showed high heterogeneity among reported data for gait self –speed (I2: 86%, P < 0.001). Subgroup analysis: among patients with chronic stroke, three clinical trials were analyzed. The results of subgroup meta-analyses show that gait self -speed increased 0.07 m/s (− 0.02–0.16) on average. I square also showed high heterogeneity in subgroup meta-analysis (I2: 92%, P < 0.001) (Fig. 2B).

Forest plot comparing gait self-speed (m/s) between PSHJE and no PSHJE groups (A). Forest plot of subgroup analysis among patients with chronic stroke, comparing gait self-speed (m/s) between PSHJE and no PSHJE groups (B). Diamond represents the weighted mean difference (pooled WMD) estimate and its width shows corresponding 95% CI with random effects estimate. The size of the square and its central point reflects the study specific statistical weight (inverse of variance) and point estimate of the WMD and horizontal line reflects corresponding 95% CI of the study. I2 test and Cochran’s Q statistic were used to assessing the statistical heterogeneity (P < 0.10) across studies
Gait max speed (m/s)
Analyzing four studies, gait max speed increased 0.13 m/s (0.10–0.17) on average, among patients rehabilitated by PSHJE. Sensitivity analysis showed the mean change of gait max speed was consistent (range of summary WMDs: 0.13–0.15), indicating that the meta-analysis model was robust. I square showed low heterogeneity among reported data for gait max speed (I2: 22%, P = 0.28) (Fig. 3).

Forest plot comparing gait maximum-speed (m/s) between PSHJE and no PSHJE. Diamond represents the weighted mean difference (pooled WMD) estimate and its width shows corresponding 95% CI with random effects estimate. The size of the square and its central point reflects the study specific statistical weight (inverse of variance) and point estimate of the WMD and horizontal line reflects corresponding 95% CI of the study. I2 test and Cochran’s Q statistic were used to assessing the statistical heterogeneity (P < 0.10) across studies
Step length (m)
Analyzing three studies, step length increased 0.06 m (0.05–0.07) on average, among patients rehabilitated by PSHJE. Sensitivity analysis showed the mean change of step length was consistent (range of summary WMDs: 0.05–0.06), indicating that the meta-analysis model was robust. I square showed low heterogeneity among reported data for step length (I2: 0%, P = 0.48) (Fig. 4).

Forest plot comparing step length (m) between PSHJE and no PSHJE groups. Diamond represents the weighted mean difference (pooled WMD) estimate and its width shows corresponding 95% CI with random effects estimate. The size of the square and its central point reflects the study specific statistical weight (inverse of variance) and point estimate of the WMD and horizontal line reflects corresponding 95% CI of the study. I2 test and Cochran’s Q statistic were used to assessing the statistical heterogeneity (P < 0.10) across studies
Cadence (step/min)
Analyzing five clinical trials, cadence increased 4.74 step/min (− 3.52–13.00) on average, among patients rehabilitated by PSHJE (Fig. 5A). I square showed high heterogeneity among reported data for cadence (I2: 61%, P = 0.035). Sensitivity analysis showed the mean change of cadence was not consistent (range of summary WMDs: 1.1–8.5), indicating that the meta-analysis model was not robust.

Forest plot comparing cadence (step/min) between PSHJE and no PSHJE groups (A). Forest plot of subgroup analysis among healthy elderly individuals, comparing cadence (step/min) between PSHJE and no PSHJE groups (B). Diamond represents the weighted mean difference (pooled WMD) estimate and its width shows corresponding 95% CI with random effects estimate. The size of the square and its central point reflects the study specific statistical weight (inverse of variance) and point estimate of the WMD and horizontal line reflects corresponding 95% CI of the study. I2 test and Cochran’s Q statistic were used to assessing the statistical heterogeneity (P < 0.10) across studies
Analyzing four single group pre-post studies, cadence increased 2.12 step/min (− 1.93–6.17) on average, among patients rehabilitated by PSHJE (Fig. 5A). I square showed high heterogeneity among reported data for cadence (I2: 89%, P < 0.001). Sensitivity analysis showed the mean change of cadence was not consistent (range of summary WMDs: 0.94–3.5), indicating that the meta-analysis model was not robust.
Subgroup analysis: among healthy elderly, three single group pre-post studies were analyzed. The results of subgroup meta-analyses show that cadence increased 3.53 step/min (− 0.48–7.55) on average (Fig. 5B). I square showed high heterogeneity among reported data for cadence (I2: 73%, P = 0.025). Sensitivity analysis showed the mean change of cadence was not consistent (range of summary WMDs: 2.5–5.5), indicating that the meta-analysis model was not robust.
Oxygen (ml/min/kg)
Pooled estimation of the two RCTs, comparing PSHJE rehabilitation with control group, oxygen cost decreased − 1.23 ml/min/kg (− 2.13 to − 0.32) on average, among patients rehabilitated by PSHJE (Fig. 6). I square showed low heterogeneity among reported data for oxygen cost (I2: 0%, P = 0.33).

Forest plot comparing oxygen cost (ml/min/kg) between PSHJE and no PSHJE groups. Diamond represents the weighted mean difference (pooled WMD) estimate and its width shows corresponding 95% CI with random effects estimate. The size of the square and its central point reflects the study specific statistical weight (inverse of variance) and point estimate of the WMD and horizontal line reflects corresponding 95% CI of the study. I2 test and Cochran’s Q statistic were used to assessing the statistical heterogeneity (P < 0.10) across studies
Discussion
Background
The present review investigated the association of the motorized hip-assist robots’ application with gait and metabolic parameters in patients with gait disorders, as well as healthy individuals. The main meta-analysis finding was that two of the five gait spatiotemporal values for max speed and stride length improve significantly after rehabilitation with single joint hip powered robots compared with conventional methods. Additionally, oxygen consumption was lower in individuals used hip robots. Gait values of self-peed and step length were also different between two groups but not statistically significantly (P = 0.09 and 0.12, respectively).
Limitation
The included studies typically have a small sample size, and limited follow-up period. Therefore, until more consistent results are revealed in bigger RCTs, no clinical advice can be made to use hip exoskeletons in people with gait disability. The patient’s condition heterogeneity among analyzed articles are significant. However, this does not seem to be the source of heterogeneity (high I2) in the gait self-speed and cadence, because the subgroup analyses on the homogenous population (chronic stroke for gait self-speed and healthy elderly individuals for cadence) did not affect the I2 value.
Discussion
Gait speed (n = 12) and cadence (n = 10) were the most often reported gait parameters, even though almost all included studies examined at least one temporal gait measure. Gait speed is significant for out-door everyday life activities, as well as enrolling in a rehabilitation program. Unfortunately, there is a lack of agreement regarding the best biomechanical gait measurements to utilize when examining motor coordination and the quality of walking patterns [56,57,58]. Although quantitative analysis in this study showed some gait values were not significantly different between the two groups, hip exoskeleton provides the opportunity for the patient to walk on his own and correct gait motor errors, and therefore increase their self-confidence, motivation, and improve psychological status.
The neuroplasticity phenomenon is the primary mechanism in which exoskeletons correct gait pattern. A well-designed robot should be able to produce complex, controlled multimodal stimulation from the bottom up and top down in order to alter the plasticity of brain connections through movement [59]. In patients with gait disorders, brain neurophysiology and organization are altered, leading to distinct brain activity patterns from those of healthy people [60]. Humans have a central pattern generator (CPG) that uses supra-spinal control of cerebral neural networks to enable rhythmic and repeated locomotor patterns [61]. Specific abnormalities in human movement are brought on by damage to specific supra-spinal structures, as seen in people who have had brain injuries such strokes [62]. To encourage the restoration of a movement pattern, the exoskeleton should provide flexibility in lower limb dynamics through sufficient degrees of freedom in all three motion planes [63]. Multisensory stimulation has been shown to be beneficial for brain reconfiguration. The reconfiguration is provided by the combination of personalized support and progression, real-time monitoring and instruction, and motor exercises that test balance control and coordination. Furthermore, because of the greater weight-shift to the affected (weak) leg during the corrective sessions, the diseased muscles become substantially more active [64, 65].
Future research should focus on improving methods for determining each patient’s specific power needs while moving through a powered single joint hip exoskeleton and matching those needs to a practical and production of smaller powered actuators for this use. As a result, patients’ compliance toward lower weight exoskeletons would increase. According on the user’s physical conditions, the rehabilitation process for people with gait abnormalities using powered hip exoskeletons can be separated into multiple stages. After a prolonged period of use, the user’s gait function may improve if they remove their exoskeleton. Nevertheless, after its discontinuation, there is a chance that gait pattern goes back to how it was. Therefore, to conduct a more robust homogeny meta-analysis on clinical outcomes, more randomized controlled trials must be carried out on each of the gait disorder types. These trials might confirm both the short- and long-term clinical outcomes, including patient-reported satisfaction, quality of life, and fall prevention on individuals with gait abnormalities. Evaluating post-intervention satisfaction and its association with gait outcomes would be an interesting topic to explore in future studies. By assessing patient satisfaction, we can gain insights into their subjective experiences and perceptions of the robotic rehabilitation interventions. This information can provide valuable supplementary data to further understand the effectiveness and acceptability of these interventions.
Conclusion
Analyzing current literature on powered hip exoskeleton, gait max speed and stride length were different between the two groups (P < 0.05). Regarding metabolic cost, patients who rehabilitated with the hip exoskeleton have consumed lower amounts of oxygen. More randomized controlled trials must be carried out to verify both the short- and long-term clinical outcomes, including patient-reported measures. The consideration of population demographic and ethnic diversity among the included articles is an important limitation to be acknowledged.
Availability of data and materials
The datasets used and/or analyzed during the current study available from the corresponding author on reasonable request.
References
Mahlknecht P, Kiechl S, Bloem BR, Willeit J, Scherfler C, Gasperi A, et al. Prevalence and burden of gait disorders in elderly men and women aged 60–97 years: a population-based study. PLoS One. 2013;8(7):e69627.
Sudarsky L. Gait disorders: prevalence, morbidity, and etiology. Adv Neurol. 2001;87:111–7.
Alexander NB, Goldberg A. Gait disorders: search for multiple causes. Cleve Clin J Med. 2005;72(7):586.
Verghese J, LeValley A, Hall CB, Katz MJ, Ambrose AF, Lipton RB. Epidemiology of gait disorders in community-residing older adults. J Am Geriatr Soc. 2006;54(2):255–61.
Baker JM. Gait disorders. Am J Med. 2018;131(6):602–7.
Van Hook FW, Demonbreun D, Weiss BD. Ambulatory devices for chronic gait disorders in the elderly. Am Fam Physician. 2003;67(8):1717–24.
Dietz V, Harkema SJ. Locomotor activity in spinal cord-injured persons. J Appl Physiol. 2004;96(5):1954–60.
Plummer P, Behrman AL, Duncan PW, Spigel P, Saracino D, Martin J, et al. Effects of stroke severity and training duration on locomotor recovery after stroke: a pilot study. Neurorehabil Neural Repair. 2007;21(2):137–51.
Reid CR, Nussbaum MA, Gregorczyk K, Harris-Adamson C, Kyte K, Lowe B, Smets M, Zmijewski R: Industrial exoskeletons: are we ready for prime time yet? Proceedings of the Human Factors and Ergonomics Society Annual Meeting Sage CA: Los Angeles, CA: SAGE Publications 2017, 61(1):1000–1004.
Talaty M, Esquenazi A, Briceno JE. Differentiating ability in users of the ReWalk TM powered exoskeleton: An analysis of walking kinematics. In: In: 2013 IEEE 13th international conference on rehabilitation robotics (ICORR): 2013. IEEE; 2013. p. 1–5.
Koseki K, Yozu A, Takano H, Abe A, Yoshikawa K, Maezawa T, et al. Gait training using the Honda walking assist device® for individuals with transfemoral amputation: a report of two cases. J Back Musculoskelet Rehabil. 2020;33(2):339–44.
Tsukahara A, Hasegawa Y, Eguchi K, Sankai Y. Restoration of gait for spinal cord injury patients using HAL with intention estimator for preferable swing speed. IEEE Trans Neural Syst Rehabil Eng. 2014;23(2):308–18.
Farris RJ, Quintero HA, Goldfarb M. Preliminary evaluation of a powered lower limb orthosis to aid walking in paraplegic individuals. IEEE Trans Neural Syst Rehabil Eng. 2011;19(6):652–9.
Chen G, Chan CK, Guo Z, Yu H. A review of lower extremity assistive robotic exoskeletons in rehabilitation therapy. Critical Reviews™ in Biomedical Engineering. 2013;41(4-5).
Hussain S, Jamwal PK, Ghayesh MH. Single joint robotic orthoses for gait rehabilitation: an educational technical review; 2016.
Buesing C, Fisch G, O’Donnell M, Shahidi I, Thomas L, Mummidisetty CK, et al. Effects of a wearable exoskeleton stride management assist system (SMA®) on spatiotemporal gait characteristics in individuals after stroke: a randomized controlled trial. J Neuroeng Rehabilitation. 2015;12(1):69.
Jayaraman A, O'Brien MK, Madhavan S, Mummidisetty CK, Roth HR, Hohl K, et al. Stride management assist exoskeleton vs functional gait training in stroke: a randomized trial. Neurology. 2019;92(3):e263–73.
Olney SJ, Richards C. Hemiparetic gait following stroke. Part I: Characteristics. Gait Posture. 1996;4(2):136–48.
Umberger BR, Rubenson J. Understanding muscle energetics in locomotion: new modeling and experimental approaches. Exerc Sport Sci Rev. 2011;39(2):59–67.
Manson JE, Hu FB, Rich-Edwards JW, Colditz GA, Stampfer MJ, Willett WC, et al. A prospective study of walking as compared with vigorous exercise in the prevention of coronary heart disease in women. N Engl J Med. 1999;341(9):650–8.
Shi D, Zhang W, Zhang W, Ding X. A review on lower limb rehabilitation exoskeleton robots. Chin J Mech Eng. 2019;32(1):1–11.
Yang C, Yu L, Xu L, Yan Z, Hu D, Zhang S, et al. Current developments of robotic hip exoskeleton toward sensing, decision, and actuation: a review. Wearable Technol. 2022;3:e15.
Nedergård H, Arumugam A, Sandlund M, Bråndal A, Häger CK. Effect of robotic-assisted gait training on objective biomechanical measures of gait in persons post-stroke: a systematic review and meta-analysis. J Neuroeng Rehabilitation. 2021;18(1):1–22.
Chen B, Zi B, Qin L, Pan Q. State-of-the-art research in robotic hip exoskeletons: a general review. J Orthop Translat. 2020;20:4–13.
Page MJ, McKenzie JE, Bossuyt PM, Boutron I, Hoffmann TC, Mulrow CD, et al. The PRISMA 2020 statement: an updated guideline for reporting systematic reviews. Int J Surg. 2021;88:105906.
DerSimonian R, Laird N. Meta-analysis in clinical trials. Control Clin Trials. 1986;7(3):177–88.
Higgins JP, Thompson SG. Quantifying heterogeneity in a meta-analysis. Stat Med. 2002;21(11):1539–58.
Kawasaki S, Ohata K, Yoshida T, Yokoyama A, Yamada S. Gait improvements by assisting hip movements with the robot in children with cerebral palsy: a pilot randomized controlled trial. J Neuroeng Rehabilitation. 2020;17(1):87.
Roggeman S, Firouzi M, Lefeber N, De Keersmaecker E, Cuypers L, Swinnen E, et al. Intrinsic motivation for using a wearable hip exoskeleton. Technol Disabil. 2022;34(2):123–31.
Lee J, Seo K, Lim B, Jang J, Kim K, Choi H. Effects of assistance timing on metabolic cost, assistance power, and gait parameters for a hip-type exoskeleton. In: In: 2017 International Conference on Rehabilitation Robotics (ICORR): 2017. IEEE; 2017. p. 498–504.
Kim DS, Lee HJ, Lee SH, Chang WH, Jang J, Choi BO, et al. A wearable hip-assist robot reduces the cardiopulmonary metabolic energy expenditure during stair ascent in elderly adults: a pilot cross-sectional study. BMC Geriatr. 2018;18(1):1–8.
Arazpour M, Chitsazan A, Hutchins SW, Ghomshe FT, Mousavi ME, Takamjani EE, et al. Evaluation of a novel powered hip orthosis for walking by a spinal cord injury patient: a single case study. Prosthetics Orthot Int. 2012;36(1):105–12.
Audu ML, To CS, Kobetic R, Triolo RJ. Gait evaluation of a novel hip constraint orthosis with implication for walking in paraplegia. IEEE Trans Neural Syst Rehabil Eng. 2010;18(6):610–8.
Ji J, Song T, Guo S, Xi F, Wu H. Robotic-assisted rehabilitation trainer improves balance function in stroke survivors. IEEE Trans Cogn Dev Syst. 2018;12(1):43–53.
Koseki K, Mutsuzaki H, Yoshikawa K, Endo Y, Maezawa T, Takano H, Yozu A, Kohno Y. Gait training using the Honda Walking Assistive Device® in a patient who underwent total hip arthroplasty: a single-subject study. Medicina. 2019;55(3):69.
Koseki K, Mutsuzaki H, Yoshikawa K, Iwai K, Hashizume Y, Nakazawa R, et al. Early recovery of walking ability in patients after Total knee arthroplasty using a hip-wearable exoskeleton robot: a case-controlled clinical trial. Geriatr Orthop Surg Rehabil. 2021;12:21514593211027675.
Koseki K, Mutsuzaki H, Yoshikawa K, Endo Y, Kanazawa A, Nakazawa R, et al. Gait training using a hip-wearable robotic exoskeleton after Total knee arthroplasty: a case report. Geriatr Orthop Surg Rehabil. 2020;11:2151459320966483.
Yoshikawa K, Mutsuzaki H, Koseki K, Endo Y, Hashizume Y, Nakazawa R, et al. Gait training using a wearable robotic device for non-traumatic spinal cord injury: a case report. Geriatr Orthop Surg Rehabil. 2020;11:2151459320956960.
Lee HJ, Lee S, Chang WH, Seo K, Shim Y, Choi BO, et al. A wearable hip assist robot can improve gait function and cardiopulmonary metabolic efficiency in elderly adults. IEEE Trans Neural Syst Rehabil Eng. 2017;25(9):1549–57.
Lee SH, Lee HJ, Chang WH, Choi BO, Lee J, Kim J, et al. Gait performance and foot pressure distribution during wearable robot-assisted gait in elderly adults. J Neuroeng Rehabilitation. 2017;14(1):123.
Lee HJ, Lee SH, Seo K, Lee M, Chang WH, Choi BO, et al. Training for walking efficiency with a wearable hip-assist robot in patients with stroke: a pilot randomized controlled trial. Stroke. 2019;50(12):3545–52.
Miura K, Koda M, Tamaki K, Ishida M, Marushima A, Funayama T, et al. Exercise training using hybrid assistive limb (HAL) lumbar type for locomotive syndrome: a pilot study. BMC Musculoskelet Disord. 2021;22(1):1–8.
Tanaka N, Matsushita S, Sonoda Y, Maruta Y, Fujitaka Y, Sato M, et al. Effect of stride management assist gait training for Poststroke hemiplegia: a single center, open-label, randomized controlled trial. J Stroke Cerebrovasc Dis. 2019;28(2):477–86.
Hsu CJ, Kim J, Tang RN, Roth EJ, Rymer WZ, Wu M. Applying a pelvic corrective force induces forced use of the paretic leg and improves paretic leg EMG activities of individuals post-stroke during treadmill walking. Clin Neurophysiol. 2017;128(10):1915–22.
Lee SH, Lee HJ, Shim Y, Chang WH, Choi BO, Ryu GH, et al. Wearable hip-assist robot modulates cortical activation during gait in stroke patients: a functional near-infrared spectroscopy study. J Neuroeng Rehabilitation. 2020;17(1):145.
Do Nascimento BG, Vimieiro CBS, Nagem DAP, Pinotti M. Hip orthosis powered by pneumatic artificial muscle: voluntary activation in absence of myoelectrical signal. Artif Organs. 2008;32(4):317–22.
Lewis CL, Ferris DP. Invariant hip moment pattern while walking with a robotic hip exoskeleton. J Biomech. 2011;44(5):789–93.
Ishmael MK, Tran M, Lenzi T. ExoProsthetics: assisting above-knee amputees with a lightweight powered hip exoskeleton. In: In: 2019 IEEE 16th International Conference on Rehabilitation Robotics (ICORR): 2019. IEEE; 2019. p. 925–30.
Kitatani R, Ohata K, Takahashi H, Shibuta S, Hashiguchi Y, Yamakami N. Reduction in energy expenditure during walking using an automated stride assistance device in healthy young adults. Arch Phys Med Rehabil. 2014;95(11):2128–33.
Lee SE, Kilpatrick C, Kang I, Hsu H, Childers WL, Young A. Investigating the impact of the user Interface for a powered hip orthosis on metabolic cost and user comfort: a preliminary study. J Prosthet Orthot. 2021;33(2):133–40.
Martini E, Crea S, Parri A, Bastiani L, Faraguna U, McKinney Z, et al. Gait training using a robotic hip exoskeleton improves metabolic gait efficiency in the elderly. Sci Rep. 2019;9(1):1–12.
Ishmael MK, Archangeli D, Lenzi T. Powered hip exoskeleton improves walking economy in individuals with above-knee amputation. Nat Med. 2021;27(10):1783–8.
Kluis L, Keller N, Bai H, Iyengar N, Shepherd R, Diaz-Artiles A. Reducing metabolic cost during planetary ambulation using robotic actuation. Aerosp Med Hum Perform. 2021;92(7):570–8.
Seo K, Lee J, Park YJ. Autonomous Hip Exoskeleton Saves Metabolic Cost of Walking Uphill. In: In: 2017 INTERNATIONAL CONFERENCE ON REHABILITATION ROBOTICS (ICORR); 2017. p. 246–51.
Young AJ, Foss J, Gannon H, Ferris DP. Influence of power delivery timing on the energetics and biomechanics of humans wearing a hip exoskeleton. Front Bioeng Biotechnol. 2017;5:4.
Sharififar S, Vincent HK, Shuster J. Bishop, mark: quantifying poststroke gait deviations: a meta-analysis of observational and cross-sectional experimental trials. J Stroke Med. 2019;2(1):23–31.
Krasovsky T, Levin MF. Toward a better understanding of coordination in healthy and poststroke gait. Neurorehabil Neural Repair. 2010;24(3):213–24.
Wonsetler EC, Bowden MG. A systematic review of mechanisms of gait speed change post-stroke. Part 1: spatiotemporal parameters and asymmetry ratios. Top Stroke Rehabil. 2017;24(6):435–46.
Molteni F, Gasperini G, Cannaviello G, Guanziroli E. Exoskeleton and end-effector robots for upper and lower limbs rehabilitation: narrative review. PM&R. 2018;10(9):S174–88.
Luft AR, Macko RF, Forrester LW, Villagra F, Ivey F, Sorkin JD, et al. Treadmill exercise activates subcortical neural networks and improves walking after stroke: a randomized controlled trial. Stroke. 2008;39(12):3341–50.
Marder E, Bucher D. Central pattern generators and the control of rhythmic movements. Curr Biol. 2001;11(23):R986–96.
Iosa M, Gizzi L, Tamburella F, Dominici N. Neuro-motor control and feed-forward models of locomotion in humans, vol. 9. Frontiers Media SA; 2015. p. 306.
Pennycott A, Wyss D, Vallery H, Klamroth-Marganska V, Riener R. Towards more effective robotic gait training for stroke rehabilitation: a review. J Neuroeng Rehabilitation. 2012;9(1):1–13.
Bastiaanse C, Duysens J, Dietz V. Modulation of cutaneous reflexes by load receptor input during human walking. Exp Brain Res. 2000;135(2):189–98.
Dietz V. Proprioception and locomotor disorders. Nat Rev Neurosci. 2002;3(10):781–90.
Acknowledgements
The hip exoskeleton (HEXA) developed by Center of Advanced Rehabilitation and Robotics Research (FUM Care) was supported as a research project financed by the National Institute for Medical Research Development (NIMAD).
Statement of the location
This work was performed in Mashhad University of Medical Sciences (MUMS) and Ferdowsi University of Mashhad, Center of Advanced Rehabilitation and Robotics Research (FUM CARE).
Funding
Not applicable.
Author information
Authors and Affiliations
Contributions
MD: Conceptualization, Investigation, Manuscript writing and proofreading. MG: Investigation. AA: Conceptualization, Supervision, Methodology, proofreading. HN: Conceptualization, Supervision, Methodology, proofreading. MHE: Supervision, Methodology. ER: Investigation. AM: Conceptualization, Supervision, Methodology, proofreading.
Corresponding author
Ethics declarations
Ethics approval and consent to participate
Not applicable.
Consent for publication
Not applicable.
Competing interests
Alireza Akbarzadeh, Ali Moradi, and Hossein Negahban are the developers of the hip exoskeleton (HEXA) in Center of Advanced Rehabilitation and Robotics Research (FUM Care) https://www.fum-care.com/index.php/component/sppagebuilder/?view=page&id=113. Other authors [Mahla Daliri, Mohammad Ghorbani, Mohammad H Ebrahimzadeh, Elham Rahmanipour] declare that they have no competing interests.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary Information
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/. The Creative Commons Public Domain Dedication waiver (http://creativecommons.org/publicdomain/zero/1.0/) applies to the data made available in this article, unless otherwise stated in a credit line to the data.
About this article

Cite this article
Daliri, M., Ghorbani, M., Akbarzadeh, A. et al. Powered single hip joint exoskeletons for gait rehabilitation: a systematic review and Meta-analysis. BMC Musculoskelet Disord 25, 80 (2024). https://doi.org/10.1186/s12891-024-07189-4
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s12891-024-07189-4