
Abstract
This article proposes Laplace Transform Homotopy Perturbation Method (LT-HPM) to find an approximate solution for the problem of an axisymmetric Newtonian fluid squeezed between two large parallel plates. After comparing figures between approximate and exact solutions, we will see that the proposed solutions besides of handy, are highly accurate and therefore LT-HPM is extremely efficient.
Similar content being viewed by others

Introduction
Although the studies of squeezing flows have their origins in the 19 th century, at present time, it is an issue of considerable importance due to its practical applications in different areas such as physical, biophysical, chemical engineering, and food industry, also they are relevant in liquid metal lubrication theory, polymer processing, compression and injection molding, among many others.
The goal of this study is to find an approximate solution for the problem of squeezing flow between two infinite parallel plates slowly approaching each other. As mentioned in (Ran et al. 2009) these fluids are of paramount importance, in hydrodynamic lubrication theory. Thus, (Langlois 1962) and (Salbu 1964) analyzed isothermal compressible squeeze films neglecting inertial effects, while (Thorpe 1967), found an explicit solution, taking into account these effects. Also have been found some numerical solutions to these problems, such as those provided in (Verma 1981) and (Singh et al. 1990). Additionally, (Rajagopal & Gupta 1981) and (Dandapat & Gupta 1991) extended the previous investigations for the case of flow between rotating parallel plates.
Laplace Transform (L.T.) (or operational calculus) has played an important role in mathematics, not only for its theoretical interest, but also because its methods let to solve, in a simpler fashion, many problems in science and engineering, in comparison with other mathematical techniques (Spiegel 1988). In particular the Laplace Transform is useful for solving linear ordinary differential equations with constant coefficients, and initial conditions, but also can be used to solve some cases of differential equations with variable coefficients and partial differential equations (Spiegel 1988). On the other hand, applications of L.T. for nonlinear ordinary differential equations mainly focus to find approximate solutions, thus in reference (Aminikhan & Hemmatnezhad 2012) was reported a combination of Homotopy Perturbation (HPM) and L.T. methods (LT-HPM), in order to obtain highly accurate solutions for these equations. However, just as with L.T; LT-HPM method has been used mainly to find solutions to problems with initial conditions (Aminikhan & Hemmatnezhad 2012; Aminikhah 2012), because it is directly related with them. Therefore this paper presents the application of LT-HPM, in the search for an approximate solution of the higher order nonlinear ordinary differential equation, which describes a squeezing flow between two infinite plates with, mixed boundary conditions defined on a finite interval (Filobello-Nino et al. 2013).
The case of equations with boundary conditions on infinite intervals, has been studied in some articles, and correspond often to problems defined on semi-infinite ranges (Hossein 2011; Khan et al. 2011). However the methods of solving these problems, are different from what will be presented in this paper (Filobello-Nino et al. 2013). The importance of research on nonlinear differential equations is that many phenomena, practical or theoretical, are of nonlinear nature. In recent years, several methods focused to find approximate solutions to nonlinear differential equations, as an alternative to classical methods, have been reported, such those based on: variational approaches (Assas 2007; He 2007; Kazemnia et al. 2008; Noorzad et al. 2008), tanh method (Evans & Raslan 2005), exp-function (Xu 2007; Mahmoudi et al. 2008), Adomian’s decomposition method (Adomian 1988; Babolian & Biazar 2002; Kooch & Abadyan 2012; Kooch & Abadyan 2011; Vanani et al. 2011; Chowdhury 2011), parameter expansion (Zhang & Xu 2007), homotopy perturbation method (Vazquez-Leal 2014; Marinca & Herisanu 2011; He 1998; He 1999; He 2006a; He 2008; Belendez et al. 2009; He 2000; El-Shaed 2005; He 2006b; Ganji et al. 2009; Ganji et al. 2008; Fereidon et al. 2010; Sharma & Methi 2011; Hossein 2011; Vazquez-Leal et al. 2012a; Vazquez-Leal et al. 2012b; Filobello-Niño et al. 2012a; Biazar & Aminikhan 2009; Biazar & Ghazvini 2009; Filobello-Niño et al. 2012b; Khan & Wu 2011; Madani et al. 2011; Aminikhan & Hemmatnezhad 2012; Aminikhah 2012; Khan et al. 2011; Filobello-Nino et al. 2013), homotopy analysis method (Patel et al. 2012), and perturbation method (Filobello-Niño et al. 2013a) among many others. Also, a few exact solutions to nonlinear differential equations have been reported occasionally (Filobello-Niño et al. 2013b).
The paper is organized as follows. In Standard HPM, we introduce the basic idea of standard HPM method. For Basic Idea of Laplace Transform Homotopy Perturbation Method (LT-HPM) we introduce Laplace transform homotopy perturbation method. Additionally in Governing equations the basic equations for the flow in study are derived. Case Study present the application of LT-HPM method, in the search for an approximate solution for the higher order nonlinear ordinary differential equation, which describes a squeezing flow between two infinite plates. Besides a discussion on the results is presented in Discussion. Finally, a brief conclusion is given in Conclusions.
Standard HPM
The standard homotopy perturbation method (HPM) was proposed by Ji Huan He, it was introduced like a powerful tool to approach various kinds of nonlinear problems. The Homotopy Perturbation Method (HPM) is considered as a combination of the classical perturbation technique and the homotopy (whose origin is in the topology), but not restricted to small parameters as occur with traditional perturbation methods. For example, HPM method requires neither small parameter nor linearization, but only few iterations to obtain highly accurate solutions (He 1998; He 1999).
To figure out how HPM works, consider a general nonlinear differential equation in the form
with the following boundary conditions
where A is a general differential operator, B is a boundary operator, f(r) a known analytical function and Γ is the domain boundary for Ω. A can be divided into two operators L and N, where L is linear and N nonlinear; so that (1) can be rewritten as
Generally, a homotopy can be constructed as (He 1998; He 1999)
or
where p is a homotopy parameter, whose values are within range of 0 and 1, u0 is the first approximation for the solution of (3) that satisfies the boundary conditions.
Assuming that solution for (4) or (5) can be written as a power series of p as
Substituting (6) into (5) and equating identical powers of p terms, there can be found values for the sequence v0, v1, v2,…
When p → 1, it yields the approximate solution for (1) in the form
Basic idea of Laplace Transform Homotopy Perturbation Method (LT-HPM)
The objective of this section is to show, how LT-HPM, can be employed to find analytical approximate solutions of Ordinary Differential Equations (ODE, s), as (3).
For this purpose LT-HPM follows the same steps of standard HPM until (5), next we apply Laplace transform on both sides of homotopy equation (5), to obtain
using the differential property of L.T, we have (Spiegel 1988)
or
applying inverse Laplace transform to both sides of (10), we obtain
Assuming that the solutions of (3) can be expressed as a power series of p
Then substituting (12) into (11), we get
comparing coefficients of p, with the same power leads to
Assuming that the initial approximation has the form: U(0) = u0 = α0, = αn − 1; U′(0) = α1,.., Un − 1(0) therefore the exact solution may be obtained as follows
Governing equations
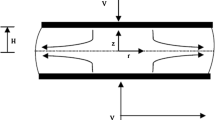
The purpose of this job is the search for an approximate solution for the nonlinear problem, which describes a viscous, incompressible fluid, squeezed between two infinite parallel plates, so that the plates are moving towards each other with a certain velocity, say W (see Figure 1).

Shows an axisymmetric fluid, squeezed between two infinite parallel plates.
The basic equations for this case, in the absence of body forces are given by
where
is the velocity vector, ρ the density, D represents the material time derivative, and T is the stress tensor, which is given by where μ is the dynamic viscosity of the fluid and P the pressure.
By symmetry arguments, the problem involves a steady axisymmetric flow, so that is represented by
Next, in order to simplify the analysis, we introduce the stream function ψ(r, z, t) defined by
Thus, we have to determine only one unknown function ψ(r, z, t), rather than the two functions u r (r, z, t) and u z (r, z, t).
It’s easy to show that the continuity equation (16) is identically satisfied using (19). Substituting (19) into the z and r components of (17) we obtain
where the differential operator E2 is given by
After eliminating the pressure from the above equations, we obtain the following equation for ψ(r, z, t)
We will assume that W is small enough so that, during the process, the gap 2l between the plates changes little and it can be considered approximately constant (see Figure 1).
Under these conditions the flow can be considered quasi-steady (Hughes & Brighton 1967; Papanastasiou et al. 2000), and therefore ψ = ψ(r, z), so that (22) is rewritten as
with the following boundary conditions (see Figure 1)
Following (Stefan 1874), (23) can be expressed as a four order ordinary differential equation, by using of the substitution
In view of (25), (23) and (24) become
with the boundary conditions
(see for example that, after substituting (25) into the second equation of (19), we obtain u z (r, z) = − 2F(z), in such a way that from (24) is obtained u z (r, 0) = − 2F(0) = 0, and so on). In order to facilitate the evaluation of (26) we introduce the following dimensionless parameters given by
so that, (26) and (27) adopt the form
where we have dropped * for simplicity.
Case study
The objective of this section is employ LT-HPM, to find an analytical approximate solution for the nonlinear problem given by (29) and (30).
from (28), ϵ is a positive parameter.
It is possible to find a handy solution by applying the LT-HPM method.
Identifying terms:
where prime denotes differentiation respect to z.
In order to obtain an approximate analytical solution for nonlinear problem (31), we construct a homotopy in accordance with (4)
or
Applying Laplace transform algorithm we get
as it is explained in (Spiegel 1988), it is possible to rewrite (36) as
where we have defined Y(s) = ℑ(F(z).
After applying the initial conditions, F(0) = 0, F″(0) = 0, the last expression can be simplified as follows
Solving for Y(s) and applying Laplace inverse transform ℑ− 1
where, we have defined A = F′(0), B = F‴(0).
Next, we assume a series solution for F(z), in the form
and by choosing
as the first approximation for the solution of (31) that satisfies the conditions F(0) = 0, F″(0) = 0.
Substituting (40) and (41) into (39), we get
On comparing the coefficients of like powers of P we have
Solving the above Laplace transforms for v0(z), v1(z), v2(z),.. we obtain
and so on.
By substituting solutions (46)-(48) into (15) and calculating the limit when p → 1, results in a second order approximation
On the other hand, the derivative of (49) is given by
In order to calculate the values of A and B, we require that equations (49) and (50) satisfy the boundary conditions F(1) = 1, F′(1) = 0, respectively. This gives rise to a system of equations for the unknowns A and B, above mentioned. Considering as cases study ϵ=1 and ϵ=2 we obtain the values
and
respectively.
Substituting (51) into (49), we obtain
On the other hand, substituting (52) into (49), we obtain
Discussion
In this work LT-HPM was used in the search for a handy accurate analytical approximate solution, for the nonlinear fourth order ordinary differential equation with finite boundary conditions, which describes the problem of squeezing flow between two infinite parallel plates slowly approaching each other. Figures 2, 3, 4 and 5, which compare our approximations with the numerical solution, showed good confirmation for all cases (for comparison purposes, we considered that the “exact” solution is computed using a scheme based on a trapezoid technique combined with a Richardson extrapolation as a build-in routine from Maple 17. Moreover, the routine was configured using an absolute error (A.E.) tolerance of 10− 12). Since LT-HPM is expressed in terms of initial conditions for a given differential equation (see (14)), our procedure was aimed to express the approximate solutions in terms of two unknown quantities A = F′(0), B = F‴(0). We noted that these values can be determined requiring that approximate solution satisfies the couple of boundary conditions F(1) = 1 F′(1) = 0, from which one obtain an algebraic system of equations for the unknowns A and B above mentioned, whose solution concludes the procedure.

Comparison between numerical solution of ( 31 ) for ϵ =1 and LT-HPM approximation ( 53 ).

Absolute Error (A.E.) between numerical solution of ( 31 ) for ϵ =1 and LT-HPM approximation ( 53 ).

Comparison between numerical solution of ( 31 ) for ϵ =2 and LT-HPM approximation ( 54 ).

Absolute Error (A.E.) between numerical solution of ( 31 ) ϵ =2 and LT-HPM approximation ( 54 ).
Figure 2 shows the comparison between numerical solution and approximate solution (53) for ϵ=1. It can be noticed that curves are in good agreement, from which is clear the accuracy of our approximation, as a matter of fact Figure 3 shows that the biggest absolute error (A.E) of (53) is scarcely of 0.0003, which is remarkably precise, above all taking into account that (53) is just a second order approximate solution for (31).
Next, we found an approximate solution for the case of parameter ϵ=2 Figure 4 shows that (54) is an accurate analytical approximate solution for (31); from Figure 5 we deduce that the biggest absolute error (A.E) is of little more than 0.0025, whereby it is clear the reliability of LT-HPM method in the search for approximate solutions of nonlinear problems with finite boundary conditions. An important fact from LT-HPM follows from equations as (31), which can be written in the form L(z) + ϵN(z) = 0 where, L(z) is linear and N(z) nonlinear. It’s well known that classical methods of approximation as perturbation method PM (Holmes 1995; Chow 1995) provide in general, better results for small perturbation parameters ϵ < < 1 (for our case, the perturbation parameter would be small for small values of the distance between the plates and of the density of the fluid (see (28)). To be precise, ϵ can be visualized as a parameter of smallness, that measures how greater is the contribution of linear term L(z) than the one of N(z). In general it is easier to find analytical approximate solutions to equations as (31) for small values of ϵ than for big values of the same. Figures 2, 3, 4 and 5 show a noticeable fact, that (53) and (54) provide a good approximation as solutions of (31), despite of the fact that perturbation parameters ϵ=1 and ϵ=2 cannot be considered small.
From the above, it is evident that for values of ϵ ≤ 2, the LT-HPM solution will describe efficiently the nonlinear problem (31). On the other hand, as we take bigger values of ϵ it will be necessary to consider higher order approximations of (15), in order to keep the accuracy, but possibly losing the handy character of our approximations. In any case, LT-HPM, is not a restricted method, to small parameters (Filobello-Nino et al. 2013). A reason by which LT-HPM applied to problems with boundary conditions is as efficient and converges so rapidly (Filobello-Nino et al. 2013), is that unlike other methods (for instance HPM) which include the boundary conditions from the beginning of the problem at the lowest order approximation, LT-HPM estimates one of the initial conditions unknown at first, requiring that the whole proposed solution satisfies one of the boundary conditions (the other boundary condition is satisfied from the beginning of the procedure), thus is ensured that the approximate solution fits correctly on both boundaries of the interval.
Is expected to be possible to apply other methods to solve the nonlinear problem proposed (31), for example, HPM and HAM. Since HPM is a particular case of the parameters of HAM (h = − 1), it is expected that in general, the approximation obtained with HAM turns out to be more accurate, because its region of convergence is based on adjusting of that parameter, while HPM corresponds to a fixed value of the aforementioned parameter and therefore is limited. However, HAM requires sometimes longer expressions, for getting accurate results, such as was reported in (Ran et al. 2009; Murad et al. 2011), where homotopy analysis method was employed to provide an approximate solution of (31). Although the solutions reported to have good accuracy, they require of major order of approximation (in (Ran et al. 2009), for example, approximations were calculated up to fiftieth order), besides generally, HAM is more complicated to applications than LT-HPM, because their approximate expressions are too long and cumbersome, in contrast to expressions like (49), (53) and (54).
Simplicity of our approximations (53) and (54) allow to obtain a simple analytical expression for the velocity field, for which would be sufficient to replace them in (25) and then, the results obtained in this way, into the expressions for the components of velocity (19). Figure 6 exemplifies the case ϵ=1. It shows a sketch for several streamlines for various values of the distance r, and therefore, provides a graphical representation of the velocity field, because as it is well known, streamlines are lines in the flow field that are everywhere tangent to the velocities (Hughes & Brighton 1967).

Streamlines for ϵ =1 using ( 25 ) and ( 53 ).
Conclusions
In this paper LT-HPM was employed to provide an approximate analytical solution for the fourth order nonlinear differential equation which describes a squeezing flow between two infinite plates with, mixed boundary conditions defined on a finite interval. LT-HPM method expresses the problem of finding an approximate solution for a nonlinear ordinary differential equation, in terms of solving an algebraic system of equations for some unknowns initial conditions. Figures 2, 3, 4 and 5, show the efficiency of this method in the search for solutions of nonlinear boundary value problems.
The above is an additional advantage for the method, considering that LT-HPM does not need to solve several recurrence differential equations, by which is a tool efficient, useful and precise in practical applications.
References
Adomian G: A review of decomposition method in applied mathematics. Math Anal Appl 1988, 135: 501-544.
Aminikhah H: The combined Laplace transform and new homotopy perturbation method for stiff systems of ODE s. Appl Math Model 2012, 36: 3638-3644.
Aminikhan H, Hemmatnezhad M: A novel effective approach for solving nonlinear heat transfer equations. Heat Transfer Asian Res 2012, 41(6):459-466.
Assas LMB: Approximate solutions for the generalized K-dV- Burgers’ equation by He’s variational iteration method. Phys Scr 2007 doi:10.1088/0031-8949/76/2/008, 76: 161-164.
Babolian E, Biazar J: On the order of convergence of Adomian method. Appl Math Comput 2002 doi: 10.1016/S0096-3003(01)00103-5, 130(2):383-387.
Belendez A, Pascual C, Alvarez ML, Méndez DI, Yebra MS, Hernández A: High order analytical approximate solutions to the nonlinear pendulum by He’s homotopy method. Phys Scr 2009 doi:10.1088/0031-8949/79/01/015009, 79(1):1-24.
Biazar J, Aminikhan H: Study of convergence of homotopy perturbation method for systems of partial differential equations. Comput Math Appl 2009, 58(No. 11–12):2221-2230.
Biazar J, Ghazvini H: Convergence of the homotopy perturbation method for partial differential equations. Nonlinear Anal Real World Appl 2009, 10(No 5):2633-2640.
Chow TL: Classical Mechanics. John Wiley and Sons Inc, New York; 1995.
Chowdhury SH: A comparison between the modified homotopy perturbation method and Adomian decomposition method for solving nonlinear heat transfer equations. J Appl Sci 2011 doi:10.3923/jas.2011.1416.1420, 11: 1416-1420.
Dandapat BS, Gupta AS: Stability of a thin layer of a second-grade fluid on a rotating disk. Int J Nonlinear Mech 1991, 26(no. 3–4):409-417.
El-Shaed M: Application of He’s homotopy perturbation method to Volterra’s integro differential equation. Int J Nonlinear Sci Numerical Simul 2005, 6: 163-168.
Evans DJ, Raslan KR: The Tanh function method for solving some important nonlinear partial differential. Int J Comput Math 2005 doi:10.1080/00207160412331336026, 82: 897-905.
Fereidon A, Rostamiyan Y, Akbarzade M, Ganji DD: Application of He’s homotopy perturbation method to nonlinear shock damper dynamics. Arch Appl Mech 2010 doi: 10.1007/s00419-009-0334-x, 80(6):641-649.
Filobello-Niño U, Vazquez-Leal H, Castañeda-Sheissa R, Yildirim A, Hernandez Martinez L, Pereyra Díaz D, Pérez Sesma A, Hoyos Reyes C: An approximate solution of Blasius equation by using HPM method. Asian J Math Stat 2012 Doi: 10.3923 /ajms.2012, ISSN 1994–5418, 2012: 10.
Filobello-Niño U, Vazquez-Leal H, Pereyra Díaz D, Pérez Sesma A, Castañeda-Sheissa R, Khan Y, Yildirim A, Hernandez Martinez L, Rabago Bernal F: HPM applied to solve nonlinear circuits: a study case. Appl Math Sci 2012, 6(2012, no. 85–88):4331-4344.
Filobello-Niño U, Vazquez-Leal H, Khan Y, Yildirim A, Jimenez- Fernandez VM, Herrera May AL, Castañeda-Sheissa R, Cervantes-Perez J: Using perturbation methods and Laplace–Padé approximation to solve nonlinear problems. Miskolc Math Notes 2013, 14(1):89-101.
Filobello-Niño U, Vazquez-Leal H, Khan Y, Perez-Sesma A, Diaz-Sanchez A, Herrera-May A, Pereyra-Diaz D, Castañeda-Sheissa R, Jimenez-Fernandez VM, Cervantes-Perez J: A handy exact solution for flow due to a stretching boundary with partial slip. Revista Mexicana de Física E 2013 ISSN 1870–3542, 59(2013):51-55. ISSN 1870–3542
Filobello-Nino U, Vazquez-Leal H, Khan Y, Perez-Sesma A, Diaz-Sanchez A, Jimenez-Fernandez VM, Herrera-May A, Pereyra-Diaz D, Mendez-Perez JM, Sanchez-Orea J: Laplace transform-homotopy perturbation method as a powerful tool to solve nonlinear problems with boundary conditions defined on finite intervals. Comput Appl Math 2013. ISSN: 0101–8205, 2013. doi:10.1007/s40314-013-0073-z
Ganji DD, Mirgolbabaei H, Miansari M, Miansari M: Application of homotopy perturbation method to solve linear and non-linear systems of ordinary differential equations and differential equation of order three. J Appl Sci 2008 doi:10.3923/jas.2008.1256.1261, 8: 1256-1261.
Ganji DD, Babazadeh H, Noori F, Pirouz MM, Janipour M: An application of homotopy perturbation method for Non linear Blasius equation to boundary layer flow over a flat plate, ACADEMIC World Academic Union, ISNN 1749-3889(print), 1749–3897 (online). Int J Nonlinear Sci 2009, 7(4):309-404.
He JH: A coupling method of a homotopy technique and a perturbation technique for nonlinear problems. Int J Nonlinear Mech 1998 doi:10.1016/S0020-7462(98)00085-7, 351: 37-43.
He JH: Homotopy perturbation technique. Comput Methods Appl Mech Eng 1999 doi:10.1016/S0045-7825(99)00018-3, 178: 257-262.
He JH: A coupling method of a homotopy and a perturbation technique for nonlinear problems. Int J Nonlinear Mech 2000, 35(1):37-43.
He JH: Homotopy perturbation method for solving boundary value problems. Phys Lett A 2006, 350(1–2):87-88.
He JH: Some asymptotic methods for strongly nonlinear equations. Int J Mod Phys B 2006 doi:10.1142/S0217979206033796, 20(10):1141-1199.
He JH: Variational approach for nonlinear oscillators. Chaos Solitons Fractals 2007 doi:10.1016/j.chaos.2006.10.026, 34: 1430-1439.
He JH: Recent development of the homotopy perturbation method. Topological Methods Nonlinear Anal 2008, 31(2):205-209.
Holmes MH: Introduction to Perturbation Methods. Springer, New York; 1995.
Hossein A: Analytical approximation to the solution of nonlinear Blasius viscous flow equation by LTNHPM. Int Scholarly Res Netw ISRN Math Anal 2011 doi:10.5402/2012/957473, 2012(Article ID 957473):10.
Hughes WF, Brighton JA: Dinámica De Los Fluidos. Mc Graw Hill, Sao Paulo; 1967.
Kazemnia M, Zahedi SA, Vaezi M, Tolou N: Assessment of modified variational iteration method in BVPs high-order differential equations. J Appl Sci 2008 doi: 10.3923/jas.2008.4192.4197, 8: 4192-4197.
Khan Y, Wu Q: Homotopy perturbation transform method for nonlinear equations using He’s polynomials. Comput Math Appl 2011, 61(8):1963-1967.
Khan M, Gondal MA, Iqtadar Hussain S, Vanani K: A new study between homotopy analysis method and homotopy perturbation transform method on a semi infinite domain. Math Comput Model 2011, 55: 1143-1150.
Kooch A, Abadyan M: Evaluating the ability of modified Adomian decomposition method to simulate the instability of freestanding carbon nanotube: comparison with conventional decomposition method. J Appl Sci 2011 doi:10.3923/jas.2011.3421.3428, 11: 3421-3428.
Kooch A, Abadyan M: Efficiency of modified Adomian decomposition for simulating the instability of nano-electromechanical switches: comparison with the conventional decomposition method. Trends Appl Sci Res 2012 doi:10.3923/tasr.2012.57.67, 7: 57-67.
Langlois WE: Isothermal squeeze films. Appl Math 1962, 20: 131.
Madani M, Fathizadeh M, Khan Y, Yildirim A: On the coupling of the homotopy perturbation method and Laplace transformation. Math Comput Model 2011, 53(9–10):1937-1945.
Mahmoudi J, Tolou N, Khatami I, Barari A, Ganji DD: Explicit solution of nonlinear ZK-BBM wave equation using Exp-function method. J Appl Sci 2008 doi:10.3923/jas.2008.358.363, 8: 358-363.
Marinca V, Herisanu N: Nonlinear Dynamical Systems in Engineering. 1st edition. Springer, Berlin Heidelberg; 2011.
Murad U, Islam S, Zaman G, Khalid SN: A note on squeezing flow between two infinite parallel plates with slip boundary conditions. Int J Phys Sci 2011, 6(14):3296-3301.
Noorzad R, Tahmasebi Poor A, Omidvar M: Variational iteration method and homotopy-perturbation method for solving Burgers equation in fluid dynamics. J Appl Sci 2008 doi: 10.3923/jas.2008.369.373, 8: 369-373.
Papanastasiou TC, Georgiou GC, Alexandrou AN: Viscous Fluid Flow. CRC Press LLC, New York; 2000.
Patel T, Mehta MN, Pradhan VH: The numerical solution of Burger’s equation arising into the irradiation of tumour tissue in biological diffusing system by homotopy analysis method. Asian J Appl Sci 2012 doi: 10.3923/ajaps.2012.60.66, 5: 60-66.
Rajagopal KR, Gupta AS: On a class of exact solutions to the equations of motion of a second grade fluid. Int J Eng Sci 1981, 19(no. 7):1009-1014.
Ran XJ, Zhu QY, Li Y: An explicit series solution of the squeezing flow between two infinite plates by means of the homotopy analysis method. Commun Nonlinear Sci Numer Simul 2009, 14: 119-132.
Salbu EO: Compressible squeeze films and squeeze bearings. J Basic Eng 1964, 86: 355.
Sharma PR, Methi G: Applications of homotopy perturbation method to partial differential equations. Asian J Math Stat 2011 doi:10.3923/ajms.2011.140.150, 4: 140-150.
Singh P, Radhakrishnan V, Narayan KA: Squeezing flow between parallel plates. Ingenieur Archiv 1990, 60(no. 4):274-281.
Spiegel MR: Teoría y Problemas de Transformadas de Laplace, Primera Edición. Serie de compendios Schaum, México; 1988.
Stefan J: Versuche uber die scheinbare Adhasion, Sitzungsberichte der kaiserlichen Akademie der Wissenschaften, Mathematisch Naturwissenschaftliche Classe, 69, Band II. Abteilung Wien; 1874:713-735.
Thorpe JF: Development in Theoretical and Applied Mathematics. Volume 3. Edited by: Shah WA. Oxford, UK: Pergamon Press; 1967.
Vanani SK, Heidari S, Avaji M: A low-cost numerical algorithm for the solution of nonlinear delay boundary integral equations. J Appl Sci 2011 doi:10.3923/jas.2011.3504.3509, 11: 3504-3509.
Vazquez-Leal H: Generalized homotopy method for solving nonlinear differential equations”. Comput Appl Math 2014 doi:10.1007/s40314-013-0060-4, 33(1):275-288.
Vazquez-Leal H, Filobello-Niño U, Castañeda-Sheissa R, Hernandez Martinez L, Sarmiento-Reyes A: Modified HPMs inspired by homotopy continuation methods. Math Probl Eng 2012 doi:10.155/2012/309123, 2012(Article ID 309123):20.
Vazquez-Leal H, Castañeda-Sheissa R, Filobello-Niño U, Sarmiento-Reyes A, Sánchez-Orea J: High accurate simple approximation of normal distribution related integrals. Math Probl Eng 2012 doi:10.1155/2012/124029, 2012(Article ID 124029):22.
Verma RL: A numerical solution for squeezing flow between parallel channels. Wear 1981, 72(1):89-95.
Xu F: A generalized soliton solution of the Konopelchenko-Dubrovsky equation using exp-function method. Zeitschrift Naturforschung A J Phys Sci 2007, 62(12):685-688.
Zhang L-N, Xu L: Determination of the limit cycle by He’s parameter expansion for oscillators in a potential. Zeitschrift für Naturforschung A J Phys Sci 2007, 62(7–8):396-398.
Acknowledgements
We gratefully acknowledge the financial support of the National Council for Science and Technology of Mexico (CONACyT) through grant CB-2010-01 #157024. The authors would like to express their gratitude to Rogelio-Alejandro Callejas-Molina and Roberto Ruiz-Gomez for their contribution to this paper.
Author information
Authors and Affiliations
Corresponding author
Additional information
Competing interests
The authors declare that they have no competing interests.
Authors’ contributions
All authors contributed extensively in the development and completion of this article. All authors read and approved the final manuscript.
Authors’ original submitted files for images
Below are the links to the authors’ original submitted files for images.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made.
The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder.
To view a copy of this licence, visit https://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Filobello-Nino, U., Vazquez-Leal, H., Cervantes-Perez, J. et al. A handy approximate solution for a squeezing flow between two infinite plates by using of Laplace transform-homotopy perturbation method. SpringerPlus 3, 421 (2014). https://doi.org/10.1186/2193-1801-3-421
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/2193-1801-3-421