
Abstract
Background
Turning involves complex reorientation of the body and is accompanied by asymmetric motion of the lower limbs. We investigated the distribution of the forces under the two feet, and its relation to the trajectory features and body medio-lateral displacement during curved walking.
Methods
Twenty-six healthy young participants walked under three different randomized conditions: in a straight line (LIN), in a circular clockwise path and in a circular counter-clockwise path. Both feet were instrumented with Pedar-X insoles. An accelerometer was fixed to the trunk to measure the medio-lateral inclination of the body. We analyzed walking speed, stance duration as a percent of gait cycle (%GC), the vertical component of the ground reaction force (vGRF) of both feet during the entire stance, and trunk inclination.
Results
Gait speed was faster during LIN than curved walking, but not affected by the direction of the curved trajectory. Trunk inclination was negligible during LIN, while the trunk was inclined toward the center of the path during curved trajectories. Stance duration of LIN foot and foot inside the curved trajectory (Foot-In) was longer than for foot outside the trajectory (Foot-Out). vGRF at heel strike was larger in LIN than in curved walking. At mid-stance, vGRF for both Foot-In and Foot-Out was higher than for LIN foot. At toe off, vGRF for both Foot-In and Foot-Out was lower than for LIN foot; in addition, Foot-In had lower vGRF than Foot-Out. During curved walking, a greater loading of the lateral heel occurred for Foot-Out than Foot-In and LIN foot. On the contrary, a smaller lateral loading of the heel was found for Foot-In than LIN foot. At the metatarsal heads, an opposite behaviour was seen, since lateral loading decreased for Foot-Out and increased for Foot-In.
Conclusions
The lower gait speed during curved walking is shaped by the control of trunk inclination and the production of asymmetric loading of heel and metatarsal heads, hence by the different contribution of the feet in producing the body inclination towards the centre of the trajectory.
Similar content being viewed by others

Background
Human walking has been extensively studied from both the kinematic and kinetic perspectives [1–3]. Most published studies deal with walking along straight paths. Few papers focus on walking along non-linear, e.g. curved, trajectories. Under the curved-walking condition, the central nervous system organizes the movement considering not only the propulsion required but also the equilibrium constraints connected to body rotation. Turning involves complex reorientation of the head, trunk, pelvis and feet [4–8], and is accompanied by adjustments of body orientation (such as trunk inclination to the inner part of the trajectory) to counteract the centrifugal acceleration acting on the walking body, and by asymmetric motion of the lower limbs, whereby the leg on the inside of the trajectory travels a shorter pathway than that on the outside [4, 9]. Not unexpectedly, recent studies requiring subjects to travel both linear and circular pathways have detected abnormalities in patients with neurological disorders. Both Parkinson’s disease [10] and stroke patients [11] show walking difficulties, more evident during circular rather than linear trajectories. Therefore, given the fundamental and clinical relevance of curved walking, the present investigation was carried out to investigate foot action during curved walking, in the hypothesis that the distribution of the vertical forces under the feet can help in producing the coordinated motion of the turning body.
Knowledge about the spatio-temporal pattern of distribution of the ground reaction forces (GRF) when walking in a circle may be useful for assessing the control of medio-lateral equilibrium and the way subjects and patients accomplish the task. It could help in detecting changes due to diseases of the central [11–13] or peripheral nervous system [14], and in estimating the evolution of the walking disorder or the potential advantage of gait rehabilitation [15, 16]. Plantar pressure analysis from different points of the foot sole [17] has a high degree of reliability [18, 19], and can be useful and appropriate for such assessment.
We hypothesised that: 1) the distribution of the forces beneath the sole differs between linear and curved trajectories, owing to the different kinematics of the two feet during curved walking; 2) the force distribution during curved walking differs between the inner and outer foot, owing to the need to exert different GRFs in order to produce the centripetal acceleration; and 3) the placement of the point of application of the forces under the foot sole should help create or modify the torques acting in the frontal plane, so as to match the body’s internal inclination during curved walking.
We analyzed the GRF collected by insole devices, since it gives an overall view of the time-course of the vertical forces and its peaks [6, 20–22]. The combination of spatial distribution, time-course, and peak values of GRF in selected parts of the feet provides detailed information about the features of the forces acting on the body during linear and curvilinear paths, and gives insight into the generation of the centripetal force when walking in circle. Preliminary results have been recently presented [6, 23].
Methods
Subjects
Twenty-six healthy participants (16 women, 10 men), aged (mean ± standard error, SE) 25.1 ± 0.5 years, range 21–35, mean body weight 63.0 ± 0.8 kg, mean height 1.7 ± 0.2 m, were recruited. No subject had a history of neurological diseases. All were free from ankle or foot pathology or other impairments that could contribute to postural instability or movement dysfunction. Exclusion criteria were major trauma in the last six months or lower limb surgery at any time previously. The study was approved by the local Research Ethics Committee and all subjects gave their informed consent.
Procedure
Subjects walked under three different conditions, in random order: linear walking (LIN) and curved walking clockwise (CW) and counter-clockwise (CCW), at self-selected speed. The circle path (1.2 m radius) was drawn with a tape stuck on the floor. Subjects executed two 20 m trials for each trajectory, making a total of 6 trials. Before data acquisition, each subject performed two short practice trials for each condition to familiarize themselves with the instrumentation and task. They were instructed to walk looking forward, head erect, and not to focus on the tape. Walking time was monitored using photocells. For the LIN trajectory, photocells were placed at the beginning and at the end of a 20 m pathway; for the curved trajectories, at the beginning of the first lap and at the end of the third lap, corresponding to an overall path of 20 m. For each subject, we collected 50 steps for each condition. The first and last two steps of each trial were excluded from data acquisition, because changes in spatial-temporal variables (albeit minimal [24]) can occur at initiation and termination of gait [25, 26]. The entire session lasted about one hour.
Data collection and treatment
Walking speed was determined from the time taken to travel a 20 m pathway for both linear and curved trajectories. Stance duration was the time interval between the heel strike and toe off of the same leg. To allow for more ready comparison between straight line walking and turning, the percentage of the total gait-cycle duration (%GC) was computed as the time-interval between two successive heel strikes of one leg. In all subjects, both feet were instrumented with insoles. Subjects wore no socks. Insoles (Pedar-X system, Novel, Germany) and shoes (Superga 2750 model, Italy) corresponding to the individual’s foot size were chosen. Insoles were placed inside the shoes and connected to the Pedar box. At the beginning of the session, the insoles were calibrated using the proprietary calibration device according to the manufacturer’s manual. Data were sampled at 50 Hz. The Pedar-X system used in this study has been previously shown to have good reliability for both linear and curved trajectories [19].
The system produces, for each sample, a force value measured as the sum of the forces registered by the active sensors from each insole: this force value was used as the vertical component of the ground reaction forces (vGRF). The time course of the vGRF was stored for each trial and subsequently analysed using proprietary software.
The insole was also divided into eight anatomical foot regions: medial and lateral heel, medial and lateral arch, I metatarsal head, II-V metatarsal heads, hallux, and lateral toes. This was done in order to describe the different contribution of each region to the total vGRF averaged across the 50 steps [18]. vGRF was normalized to body weight (%BW = vGRF /BW*100) to reduce inter-individual variability [27, 28].
We also measured trunk inclination during linear and curved trajectories by means of a tri-axial accelerometer (MicroStrain G-LINK Wireless Accelerometer System, ± 2 g range). This was placed in a pocket fastened by an elastic belt to the sternum, in the midline and midway along its length. Data were transferred wirelessly to a PC for off-line analysis. Acceleration data were sampled at 32 Hz; inclination was estimated using a low-pass FIR filter (finite impulse response filter, cut-off frequency = 0.3 Hz, 50th order/51-tap) in order to obtain the gravitational component of the medio-lateral acceleration, followed by trigonometric transformation [29].
Statistical analysis
We used parametric statistics, since the variables to be compared (vGRF, stance duration, walking speed, trunk inclination) followed a normal distribution (p > 0.05, Shapiro-Wilk’s Test) and variances were homogeneous (Levene’s Test, p > 0.05 for all variables). One-way analysis of variance (ANOVA) assessed differences in walking speed under the three walking conditions (LIN, CW, CCW). Two-way ANOVA was performed for vGRF and stance duration of the left and right foot during the three walking conditions. During curved trajectories, meaningful functional comparisons between feet were made according to the position of the foot with respect to the trajectory, i.e. foot on the inside (‘Foot-In’) or on the outside (‘Foot-Out’). Values of vGRF from each foot anatomical region were compared in the three conditions (LIN, Foot-In, Foot-Out) with one-way ANOVA. When ANOVA gave a significant result (p < 0.05), post-hoc analysis was performed with Tukey’s test. CW and CCW have been examined as different conditions. Since the major gait determinants such as speed and cadence were not different between curved trajectories (see Table 1), the plantar vGRF of the feet were collapsed into a Foot-In and a Foot-Out prior to statistical analysis. Data are presented as means ± SE in the figures and the text. The software STATISTICA (StatSoft, version 12.0) was used.
Results
Gait variables during linear and curved trajectories
As shown in Table 1, walking speed and cadence were significantly affected by the type of trajectory, both being larger during LIN than curved. On the other hand, during curved-walking, speed and cadence were not affected by the direction of the trajectory.
During LIN, stance duration was similar in the left and right foot (Table 1). During curved walking, stance duration of the Foot-Out was shorter than that of LIN foot and Foot-In, while there was no difference between LIN foot and Foot-In. The changes observed in the above gait variable according to the type of trajectory confirmed previous findings in young [19] and elderly subjects as well as patients [10, 11].
Ground reaction force during the stance phase
Figure 1A shows the vGRF-time profiles during the stance phase in the left foot of a representative subject during LIN and during CW and CCW walking, when the foot was Foot-Out or Foot-In. The profiles are characterized by two peaks separated by a trough: the first peak broadly corresponds to the heel strike and weight acceptance phase (henceforth expressed as heel strike, HS), the trough to the foot mid-stance (MS), and the second peak to terminal stance and toe off (TO). LIN and curved trajectories differently affected the step time profile of vGRF: while this was superimposable for both feet during LIN (not shown), compared to LIN the vGRF profiles of both Foot-In and Foot-Out showed a decrease of the first (HS) and last peak (TO) and an increase of the trough at MS. Further, the trough was relatively larger in Foot-In than Foot-Out (Figure 1B).
At HS, vGRF was 129.6 %BW ± 2.7, 113.6% ± 2.5 and 119.6% ± 2.8 for LIN foot, Foot-In and Foot-Out, respectively (F(2,76) = 9.36; p < 0.0005) (Figure 2A). Post-hoc analysis showed that vGRF of both Foot-In and Foot-Out were lower than that of LIN foot (respectively, p < 0.0005 and p < 0.05). In turn, vGRF was slightly smaller (not significantly so) for Foot-In than Foot-Out (p = 0.25). At MS, vGRF was 62.8%BW ± 2.3, 86.4 ± 2.3 and 80.0 ± 3.1 in LIN foot, Foot-In and Foot-Out, respectively (F(2,76) = 32.0; p < 0.0005) (Figure 2B). Both Foot-In and Foot-Out had greater vGRF values than LIN foot (post-hoc, p < 0.0001). vGRF of Foot-In was marginally higher than that of Foot-Out (p = 0.07). At TO, vGRF was 136.5%BW ± 2.7, 121.3 ± 2.7 and 127.9 ± 2.8 in LIN foot, Foot-In and Foot-Out, respectively (F(2,76) = 7.70; p < 0.005) (Figure 2C). Post-hoc analysis showed that Foot-In had smaller vGRF values than LIN foot (p < 0.005). vGRF was marginally smaller in Foot-Out than LIN foot (p = 0.08).

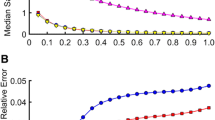
Vertical component of the ground reaction force (vGRF) during linear and curved trajectories in the outer and inner foot. A. Profiles of the vertical component of the ground reaction force (vGRF) obtained during stance in the left foot of a representative subject during linear (LIN) walking and in the same foot when it was on the outside (Foot-Out) and inside (Foot-In) of the curved trajectory. B. Average of all subjects (+ standard error, SE) of the vGRF normalized to body weight (% BW) measured during the linear trajectory (LIN) as the average of right and left foot values and during the curved trajectory in the inner (Foot-In) and outer foot (Foot-Out). Values are obtained from the peak values at heel strike and toe off, and from the trough value at mid-stance. Average of 50 steps.

Average (+ standard error, SE) of the vertical component of the ground reaction force (vGRF) normalized to body weight (% BW) measured during the linear trajectory (LIN) as the average of right and left foot values and during curved trajectory in the inner (Foot-In) and outer foot (Foot-Out). Values are obtained from the peak values of vGRF at heel strike (A) and toe off (C), and from the trough value at mid-stance (B). A. At Heel Strike, vGRF of both Foot-In and Foot-Out was lower than that of LIN foot. B. At Mid-Stance, both Foot-In and Foot-Out had greater vGRF values than LIN foot. C. At Toe Off, Foot-In had smaller vGRF values than LIN foot. *, p < 0.05; **, p < 0.005; ***, p < 0.0005.
Ground reaction force distribution in space
Figure 3 shows the vGRF (%BW) values in each of the eight anatomical regions of the left and right foot during LIN walking (A) and of Foot-In and Foot-Out during curved walking (B), averaged across subjects (Table 2). Each region is coloured according to the values of the mean vGRF. The colour code is reported in the calibration bar at the bottom of the figure.

Estimated ground reaction force normalized to body weight (%BW) measured in each of the eight anatomical regions of the foot during linear trajectory (A) in the right and left foot values and during counter-clockwise trajectory (B) in the inner (Foot-In) and outer foot (Foot-Out). Each color corresponds to a non-linear range of %BW value featuring a significant p value at post-hoc analysis with respect to the corresponding anatomical region of the contralateral foot.
For LIN, the values of vGRF in each of the eight anatomical regions were distributed equally in both feet (Figure 3A). Accordingly, the values shown in Table 2 for each anatomical region are the averages for both feet. On the whole, the lateral part of the foot was loaded to a larger extent than the medial part, except for the hallux. This basic pattern was maintained in the three trajectories. However, modest (maximum 10%BW) but significant changes in vGRF in the anatomical regions of the foot sole were present between LIN and curved walking (see Table 2 and Figure 3B). For curved trajectories, Foot-In and Foot-Out were differently loaded with respect to LIN foot. Firstly, at heel strike, the lateral part of the Foot-In heel was unloaded with respect to that of LIN foot and Foot-Out. On the contrary, the medial part of the heel of Foot-Out was unloaded with respect to that of LIN foot and Foot-In. Regarding the medial and lateral arch, changes between the trajectories were negligible. Changes were instead again evident in the forefoot. At the level of the metatarsal heads, the lateral part of Foot-Out was unloaded with respect to that of LIN foot and Foot-In, while the medial part of Foot-In was unloaded with respect to Foot-Out. Strikingly different behaviour between the lateral and medial part of the foot was observed at the hallux and lateral toes. The hallux showed a clear-cut unloading in Foot-In with respect to LIN foot and Foot-Out, while the changes in the outer toes were smaller.
In order to shortly describe the changes in vGRF distribution in the four medial and lateral anatomical regions of the foot during LIN and curved trajectories, we calculated an asymmetry index (AI) for each of the regions of LIN foot, Foot-In and Foot-Out, as:

Figure 4 shows that AI was negative for both linear and curved trajectories in the cases of the heel, arch and metatarsal heads, in keeping with the larger vGRF on the lateral than medial part of these foot regions. AI of the forefoot at the toes was positive, again regardless of the trajectory, indicating a larger vGRF on the hallux than lateral toes. Turning trajectory significantly modulated AI of the heel and the metatarsal heads, not so AI of the arch and toes. During LIN trajectory, AI of both heel and metatarsal heads showed an intermediate value between those for CW and CCW. One-way ANOVA showed a significant effect of feet (LIN foot, Foot-In, Foot-Out) on the heel (F(2,96) = 26.31; p < 0.0001), metatarsal heads (F(2,96) = 3.57; p < 0.05), but not on the arches (F(2,96) = 0.75; p = 0.47) and toes (F(2,96) = 0.37; p = 0.69). The post-hoc test showed that, during curved walking, AI of the Foot-Out heel became more negative than that of LIN foot (p < 0.0005) or Foot-In (p < 0.0005). This was in keeping with an increasing greater loading of the lateral part of the heel for Foot-Out with respect to Foot-In and LIN foot. On the contrary, AI became less negative for Foot-In with respect to LIN foot (p < 0.01), sign of a decreasing lateral loading of the heel. At the metatarsal heads, AI acted in the opposite way: for Foot-Out, it became slightly less negative (p = 0.62) with respect to LIN foot while, for Foot-In, it became more negative than LIN foot (p = 0.21) and Foot-Out (p < 0.05), in keeping with an increasing larger loading of the lateral part of the metatarsal heads of Foot-In with respect to Foot-Out and LIN foot.

Asymmetry index (AI) of the estimated ground reaction force distribution at the heel, metatarsal heads, arches and toes of the foot during linear (LIN) and curved trajectories (Foot-In, Foot-Out). In the ordinate, larger negative values (average ± standard error, SE) of AI represent an increase in vGRF on the lateral part of the relevant foot region. During curved walking, AI of the Foot-Out heel became more negative than that of LIN foot and Foot-In. On the contrary, AI became less negative for Foot-In with respect to LIN foot. At the metatarsal heads, AI showed the opposite behaviour: for Foot-Out, it became slightly less negative with respect to LIN foot. On the contrary, for Foot-In, it became more negative than LIN foot and Foot-Out. *, p < 0.05; **, p < 0.005; ***, p < 0.0005.
Trunk inclination during linear and curved walking
Trunk inclination in the frontal plane was dependent on the trajectory (Figure 5A). During LIN walking, inclination ranged between −1 and +0.9 deg. For curved paths, the trunk was inclined toward the interior of the trajectory: for CCW, it was inclined to the left (negative values), ranging across subjects between −7.6 and −2.1 deg, while for CW it was inclined to the right (positive values), ranging between +0.5 and +7.6 deg. On average, trunk inclination was −0.3 deg ± 0.1, −4.6 deg ± 0.4, and +4.4 deg ± 0.5 during LIN, CCW and CW, respectively. ANOVA showed a significant effect of the trajectories on inclination (F(2,30) = 162.3; p < 0.0001). Inclination values differed from each other for the three trajectories (post-hoc, p < 0.0001).

Trunk inclination during linear and curved trajectories and its relation to walking speed. A. Trunk inclination during the linear (LIN) and curved trajectories (counter-clockwise, CCW; clockwise, CW). The curved trajectories present a similar but opposite value. B. Relationship between walking speed normalized to height and trunk inclination across subjects. A linear relationship is present between inclination and speed but only during curved trajectories. *, p < 0.05; **, p < 0.005; ***, p < 0.0005.
Figure 5B shows that, across subjects, even moderate changes in walking speed had an effect on trunk inclination, i.e. the faster the gait speed (normalized to height), the more inclined the trunk, both for CW (y = 12.63× – 5.28, p < 0.01, r2 = 0.56) and for CCW (y = −7.03× + 1.2, p < 0.01, r2 = 0.36). Clearly, no relationship was found between speed and trunk inclination during LIN trajectories (y = −0.18 – 0.12×, p = 0.90, r2 = 0.001).
As expected, the asymmetry index (AI) of the vGRF values of each foot exhibited a clear-cut dependence on trunk inclination during the CW and CCW trajectories. This dependence was opposite for the back (heel) and for the front part (metatarsal heads) of both feet. In Figure 6, the mean trunk inclination (right, positive values) is plotted against the mean AI (abscissa), for the LIN, CW and CCW trajectories. Briefly, during CW, the heel of the right foot (Foot-In, panel D) was loaded relatively more in its medial part, while during CCW, the heel of the same foot (now Foot-Out) was loaded more in its lateral part. A mirror pattern was observed for the front part of the right foot (panel B). In this case, during CW the metatarsal heads of the right foot (Foot-In) were loaded more in their lateral part, while during CCW the metatarsal heads of the right foot (now Foot-Out) were loaded more in their medial part (right bottom panel). Panels A and C show similar but opposite patterns for the left foot.

Dependence of the asymmetry index (AI) of the vGRF distribution at the metatarsal heads of the left and right foot (respectively, A and B) and at the heel of the left and right foot (respectively, C and D) on trunk inclination during linear (LIN), counter-clockwise (CCW) and clockwise (CW) trajectories. In the abscissa, larger negative values (average ± standard error, SE) of AI represent an increase in vGRF on the lateral part of the relevant foot region. In the ordinate, positive or negative values (average ± SE) represent respectively inclination towards right or left side. See text for explanation.
Discussion
Several studies have shown that there is a moderate reduction in walking speed along a curved path with respect to walking in a straight line [4, 10, 19, 30–37], dependent on the angle of turn [38]. This reduction may be due to biomechanical constraints, to the necessary tuning of the locomotor command directed to the limbs [5], and/or to the need to stabilize the head or the lower limb joints [30, 39]. Curved walking also involves different neural processes compared to straight-path walking. Cognitive flexibility and set-shifting processes uniquely contribute to how individuals navigate curved paths [40, 41].
The present findings confirm the slight decrease in velocity during curved compared to linear walking in young healthy subjects [19]; at the same time, they increase our insight into the mechanisms underlying curved walking, showing an interaction in the pattern of the vertical component of the ground reaction force (vGRF) within and between the two feet during curved walking. While the insole output of the two feet is symmetric during linear walking, the pattern diverges during curved walking. Further, the modifications of the vGRF from the linear pattern are differently distributed in the various parts of the feet, depending on the position of the foot with respect to the orientation of the curved path and on the time-course of the stance phase.
In this study, both CW and CCW trajectories have been performed and have been separately examined as different conditions, instead of collapsing CW and CCW walking into one ‘turning’ condition. This was made in order to exclude that a ‘preferred’ leg would have produced different results when matched to a ‘preferred’ direction, with potential differences in walking velocity for CW and CCW turning, since leg preference might contribute to balance asymmetries and be associated with different foot placements [42, 43].
Profiles of the ground reaction force during the stance phase
The vGRF time profiles during the stance phase of gait are characterized by two peaks [44]: the first peak corresponds to the heel strike and weight-acceptance phase, the second peak to the last part of the stance until toe off, when the vGRF becomes zero. With respect to the straight path, the force profiles of both feet during curved walking show a decrease of the first and last peaks and an increase of force during the trough corresponding to mid-stance. Further, when compared between feet during curved walking, the peaks are slightly but significantly lower, and the trough slightly but significantly higher, in Foot-In than Foot-Out (see Figure 1B). Therefore, the outer foot would play a predominant role in steering the body, as shown by the higher value of the forces during both the first and second peak. During mid-stance, however, the higher force at the inner foot is likely due to the body pivoting on it during turning. Such a pattern of vertical forces during stance had been observed previously, as well as its dependence on curvature and velocity [6, 45].
The smaller amplitude of the first and last peaks (both feet) in curved with respect to linear walking may be in part related to the fact that the insole records only the vertical component of the force. This depends on the distance between the instantaneous positions of the center of mass (CoM) of the body and of the vGRF of the stance foot. In this study, we did not compute the position of the CoM of the body. However, its distance from the vGRF must have increased during curved with respect to straight walking, as clearly shown by the inclinometer measurements and by the strong relationship between trunk inclination angle and velocity of curved walking (see Figure 5B) [4]. Therefore, the diminished values of vGRF must reflect the new vertical force equal to F = F * cos inclination-angle. The inter-peak trough during curved trajectories was however increased with respect to linear walking. This must depend on the overall different distributions of the vGRF during the stance phase in curved with respect to linear trajectories. The increase of the trough would be even larger were it not for the effect of the inclination. This increase must be related to the production of the curved trajectory, whereby the body pivots in the horizontal plane on the foot arch during the yaw rotation, however briefly, for the production of a small angular deviation for each step [4], rather than rolling onto the forefoot along the para-sagittal plane. Of note, the stance duration is normally slightly longer for the inner than the outer foot (see Table 1) [9]. The increased load of the mid-foot during mid-stance is common to both the inner and outer foot, so that each foot (albeit more so the inner foot) can contribute a compliant support for the body weight [46] step after step, as one walks a curved path.
Trunk inclination
The generation of the centripetal force at foot level can be effective only if trunk control is adequate. This must requires a delicate coordination pattern of muscle activities along the body. That this is so has been shown some time ago by Courtine et al. [7] and Orendurff et al. [47], who found that amplitude and timing characteristics of limb and trunk muscle activities were significantly correlated to the spatial and temporal gait adaptations associated with curvilinear locomotion. Ultimately, the accurate and appropriate position of the inner and outer foot should be the result of the coordinated spatial and temporal modulation of muscle activities of the entire kinematic chain. This is tuned as a function of both spatial and temporal features of gait [7] and assures the critical control of upper body stability [48].
Some authors already used these vertical force variables as a measure of balance during walking [41, 49]. In the present study, a relationship between trunk inclination and speed normalized to height was clearly present. During curved as opposed to linear walking, the body mid-point comes closer to the inner and more distant from the outer foot during the respective stance phases. The tighter the curve, the more the body mid-point shifts towards the inner foot during its stance phase until the body mid-point bypasses the inner foot toward the centre of curvature [9, 6].
In addition to the variability across subjects of body kinematics and asymmetry indexes, other spatial features of gait may play a role in the relatively large scatter of the relationship between trunk inclination and gait speed shown in Figure 5B. These features have not been directly measured in this study. However, they might include the yaw angle of the feet and the step width [4], which may not be exactly the same in all subjects.
Spatial distribution of the ground reaction force underneath the foot sole
The subdivision of the foot print into eight regions (four for each longitudinal half) allowed to further explore the mechanisms subserving the controlled production of centripetal force during curved walking. For simplicity, we discuss here in detail only the most salient features of vGRF during the load-acceptance phase and the late stance phase (see Figure 7). Undoubtedly, the measurement of vGRF per se under the feet cannot provide the generation of centripetal force, which is a horizontal force that is not measured by the insoles. However, the instantaneous position of the point of application of this vertical force during turning, and its displacement with respect to what happens during linear walking, can give insight in the production of the gap between the center of mass and this application point. This distance created between center of mass and center of pressure in the medio-lateral plane produces a disequilibrium torque driven by gravity that is responsible for accelerating the body toward the center of the trajectory, very much as a similar torque during linear walking produces a disequilibrium in the sagittal plane that accelerates the body forward [50, 51].

Description through the asymmetry index (AI), of the shifts of vGRF subserving the controlled production of the centripetal force during curved walking. Black points indicate the AI during counter-clockwise trajectories; the white points indicate AI during linear trajectories. Note in the Foot-Out the displacement from medial to lateral position of vGRF at the heel and from lateral to medial position of vGRF at the metatarsal heads with respect to linear walking. The reverse occurs in the Foot-In.
At heel strike, compared to linear walking, CCW is associated with displacement of the point of application of the vGRF toward the lateral part of the heel (as indicated by the increased AI) of the right (outer) foot. This outer displacement produces an increased medio-lateral distance between the center of mass of the body (displaced toward the interior of the trajectory) and the application point, therefore a larger torque acting in the frontal plane and pushing the center of mass toward the inner part of the trajectory, favoring centripetal acceleration [52]. Then, once the body rolls over the foot and the vGRF moves to the metatarsal heads, the force exhibits a moderate displacement toward the medial part of the forefoot. This relatively reduces the torque acting on the body directed to the inner part of the trajectory. Overall, it seems that a push-pull mechanism operates on the body mass: when touching the ground, the outer foot helps the body ‘fall’ toward the interior of the trajectory, while in the late stance phase its front part brakes any further inclination of the body to the interior of the trajectory by having its medial (inner) part put pressure on the ground.
Under the same CCW condition, compared to linear walking, the vGRF of the left (inner) foot at foot contact is shifted toward the medial part of the heel. This increases the net torque acting on the body mass directed to the interior of the trajectory. The body fall to the interior is therefore being favored by the inner foot during the weight acceptance phase. On the other hand, the small displacement of the point of application of the vGRF at the lateral metatarsal heads during the evolution of the stance phase of the inner foot (AI is increased) brakes any further fall toward the interior of the trajectory, thereby favoring the movement of center of mass toward the exterior of the trajectory.
The described features are closely mirrored in CW walking (Figure 6). Overall, it seems that a double push-pull mechanism operates on the body mass. At heel contact and weight acceptance, both feet create a torque pushing the body to the interior of the trajectory. On the contrary, both forefeet have an opposing action, or an action braking the inward fall, by increasing the torque directed to the outer part of the trajectory. During curved walking, the late stance phase has a braking action, promptly counteracted by the heel contact of the opposite foot when the double stance phase supervenes. The double-stance phase reinstates the appropriate inward fall due to the shift of the vGRF point of application to the lateral part of the outer foot heel when it touches the ground.
Thus the feet behave functionally in the same way, regardless of their being the inner or outer foot. This is possible because of the asymmetry of the path of the vGRF below the feet: from medial (at heel strike) to lateral (at toe off) for the inner foot, and from lateral (at heel strike) to medial (at toe off) for the outer foot. Obviously, the net effect of this push-pull pattern cannot be but an inward thrust, as witnessed by the trunk inclination toward the interior of the trajectory, which counteracts the centrifugal force during steady-state turning.
Limitations
Precise calculation of the torques presupposes a complete quantitative description of the generation of the centripetal force. We did not record the yaw placement of the feet (inner and outer) with respect to the direction walked. Foot distance from the trajectory can have major impact on the vGRF distribution and the direction of the ensuing torques [53]. For instance, patients affected by different ailments may exhibit different foot placements from normal subjects [11, 14, 54] and this can affect their capacity to smoothly walk a circular path. Even in our normal subjects here, inconsistent foot placement may have been the source of the observed non-negligible variability in the recorded variables [55]. Another limitation is that we did not record the body segment kinematics or compute the body’s center of mass. Measuring the medio-lateral trunk inclination can provide easy, comprehensive and meaningful information about gait pattern during curved paths. However, from the mere measure of body inclination, one can have only indirect information on the biomechanics of curved walking. Data on foot placement and center of mass position together would have allowed a precise estimation of the torques accompanying circular walking.
Further, by necessity, plantar insoles, as compared to force platforms, give information on the vertical component of the force produced by the walking body, and cannot reveal the size of the shear forces [56]. Devices able to yield continuous measures of plantar shear-forces during walking are not readily available. Shear forces inevitably have a non-negligible value [57], the more so during curved walking because of the trunk inclination accompanying this locomotor task, and do certainly play a role in the production of mechanical effects in the frontal plane [47, 13].
Therefore, the present results can give insight into the way foot placement exploits gravity in order to produce the body inclination during curved walking, by creating the properly oriented medio-lateral torques. The effect of the shear forces in favouring or braking the inward fall cannot be addressed here. However, we would consider that shear forces are more the consequence than the cause of the body inclination, and may not be a continuously controlled variable in the production of curved walking on solid, non-slippery ground.
Conclusions
The present findings provide comprehensive and meaningful information about the pattern of GRF in curved walking in healthy subjects and give hints about the role of trunk inclination in accomplishing this task. In spite of the limitations mentioned above, the combined use of plantar insoles and accelerometer systems is an easy and relatively low-cost method. The advantage of the insoles is that there is no constraint on foot placement and that many consecutive strides can be recorded, while knowledge about the medio-lateral trunk inclination when walking along curved pathways may be useful in addressing problems in the control of equilibrium during turning.
The hypotheses put forward in this study should be tested in patients with problems in turning while walking. We predict that in these patients both distribution of plantar pressures as measured by insoles and of trunk inclination as measured by the accelerometer would be abnormal. We would also predict that the largest deviations from normal behaviour should be more evident during curved than linear trajectories, in which balance control is less critical [40].
Abbreviations
- vGRF:
-
Vertical ground reaction force
- BW:
-
Body weight
- SE:
-
Standard error
- LIN:
-
Linear
- CW:
-
Clockwise
- CCW:
-
Counter-clockwise
- %GC:
-
Percentage of total gait cycle duration
- AI:
-
Asymmetry index
- HC:
-
Heel contact
- MS:
-
Mid-stance
- TO:
-
Toe off.
References
Zajac FE, Neptune RR, Kautz SA: Biomechanics and muscle coordination of human walking. Part I: introduction to concepts, power transfer, dynamics and simulations. Gait Posture 2002,16(3):215–32. 10.1016/S0966-6362(02)00068-1
Kuo AD, Donelan JM: Dynamic principles of gait and their clinical implications. Phys Ther 2010,90(2):157–74. 10.2522/ptj.20090125
Bohannon RW, Williams Andrews A: Normal walking speed: a descriptive meta-analysis. Physiotherapy 2011,97(3):182–9. 10.1016/j.physio.2010.12.004
Courtine G, Schieppati M: Human walking along a curved path. I. Body trajectory, segment orientation and the effect of vision. Eur J Neurosci 2003,18(1):177–90. 10.1046/j.1460-9568.2003.02736.x
Courtine G, Schieppati M: Tuning of a basic coordination pattern constructs straight-ahead and curved walking in humans. J Neurophysiol 2004,91(4):1524–35. 10.1152/jn.00817.2003
Schmid M, De Nunzio AM, Beretta MV, Schieppati M: Walking along a curved trajectory. Insight into the generation of the centripetal force. Gait Posture 2004,20(Suppl1):S116.
Courtine G, Papaxanthis C, Schieppati M: Coordinated modulation of locomotor muscle synergies constructs straight-ahead and curvilinear walking in humans. Exp Brain Res 2006,170(3):320–35. 10.1007/s00221-005-0215-7
Glaister BC, Bernatz GC, Klute GK, Orendurff MS: Video task analysis of turning during activities of daily living. Gait Posture 2007,25(2):289–94. 10.1016/j.gaitpost.2006.04.003
Courtine G, Schieppati M: Human walking along a curved path. II. Gait features and EMG patterns. Eur J Neurosci 2003,18(1):191–205. 10.1046/j.1460-9568.2003.02737.x
Guglielmetti S, Nardone A, De Nunzio AM, Godi M, Schieppati M: Walking along circular trajectories in Parkinson’s disease. Mov Disord 2009, 24:598–604. 10.1002/mds.22424
Godi M, Nardone A, Schieppati M: Curved walking in hemiparetic patients. J Rehabil Med 2010, 42:858–65. 10.2340/16501977-0594
Nardone A, Godi M, Grasso M, Guglielmetti S, Schieppati M: Stabilometry is a predictor of gait performance in chronic hemiparetic stroke patients. Gait Posture 2009, 30:5–10. 10.1016/j.gaitpost.2009.02.006
Goodworth AD, Paquette C, Jones GM, Block EW, Fletcher WA, Hu B, Horak FB: Linear and angular control of circular walking in healthy older adults and subjects with cerebellar ataxia. Exp Brain Res 2012, 219:151–61. 10.1007/s00221-012-3074-z
Nardone A, Corna S, Turcato AM, Schieppati M: Afferent control of walking: are there distinct deficits associated to loss of fibres of different diameter? Clin Neurophysiol 2014,125(2):327–35. 10.1016/j.clinph.2013.07.007
Lee NK, Kwon JW, Son SM, Nam SH, Choi YW, Kim CS: Changes of plantar pressure distributions following open and closed kinetic chain exercise in patients with stroke. NeuroRehabilitation 2013,32(2):385–90.
Chen CY, Hong PW, Chen CL, Chou SW, Wu CY, Cheng PT, Tang FT, Chen HC: Ground reaction force patterns in stroke patients with various degrees of motor recovery determined by plantar dynamic analysis. Chang Gung Med J 2007,30(1):62–72.
Warabi T, Kato M, Kiriyama K, Yoshida T, Kobayashi N: Analysis of human locomotion by recording sole-floor reaction forces from anatomically discrete points. Neurosci Res 2004,50(4):419–26. 10.1016/j.neures.2004.08.009
Ramanathan AK, Kiran P, Arnold GP, Wang W, Abboud RJ: Repeatability of the Pedar-X in-shoe pressure measuring system. Foot Ankle Surg 2010,16(2):70–3. 10.1016/j.fas.2009.05.006
Godi M, Turcato AM, Schieppati M, Nardone A: Test-retest reliability of an insole plantar pressure system to assess gait along linear and curved trajectories. J Neuroeng Rehabil 2014, 11:95. 10.1186/1743-0003-11-95
Piscoya JL, Fermor B, Kraus VB, Stabler TV, Guilak F: The influence of mechanical compression on the induction of osteoarthritis-related biomarkers in articular cartilage explants. Osteoarthritis Cartilage 2005, 13:1092–9. 10.1016/j.joca.2005.07.003
Castro M, Abreu S, Sousa H, Machado L, Santos R, Vilas-Boas JP: Ground reaction forces and plantar pressure distribution during occasional loaded gait. Appl Ergon 2013,44(3):503–9. 10.1016/j.apergo.2012.10.016
Castro MP, Soares D, Mendes E, Machado L: Plantar pressures and ground reaction forces during walking of individuals with unilateral transfemoral amputation. PM R 2014,6(8):698–707. 10.1016/j.pmrj.2014.01.019
Godi M, Turcato AM, Giordano A, Comazzi F, Schieppati M, Nardone A: Ground reaction forces during linear and curved walking trajectories. Proceedings of the First Clinical Movement Analysis World Conference: 29 September-4 October 2014; Rome 2014b, 248.
Breniere Y, Do MC: When and how does steady state gait movement induced from upright posture begin? J Biomech 1986,19(12):1035–40. 10.1016/0021-9290(86)90120-X
Owings TM, Grabiner MD: Measuring step kinematic variability on an instrumented treadmill: how many steps are enough? J Biomech 2003,36(8):1215–8. 10.1016/S0021-9290(03)00108-8
Randolph AL, Nelson M, Akkapeddi S, Levin A, Alexandrescu R: Reliability of measurements of pressures applied on the foot during walking by a computerized insole sensor system. Arch Phys Med Rehabil 2000,81(5):573–8. 10.1016/S0003-9993(00)90037-6
Mullineaux DR, Milner CE, Davis IS, Hamill J: Normalization of ground reaction forces. J Appl Biomech 2006, 22:230–3.
Wannop JW, Worobets JT, Stefanyshyn DJ: Normalization of ground reaction forces, joint moments, and free moments in human locomotion. J Appl Biomech 2012, 28:665–76.
Bussmann JB, Martens WL, Tulen JH, Schasfoort FC, van den Berg-Emons HJ, Stam HJ: Measuring daily behavior using ambulatory accelerometry: the activity monitor. Behav Res Methods Instrum Comput 2001, 33:349–56. 10.3758/BF03195388
Imai T, Moore ST, Raphan T, Cohen B: Interaction of the body, head, and eyes during walking and turning. Exp Brain Res 2001, 136:1–18. 10.1007/s002210000533
Vieilledent S, Kerlirzin Y, Dalbera S, Berthoz A: Relationship between velocity and curvature of a human locomotor trajectory. Neurosci Lett 2001, 305:65–9. 10.1016/S0304-3940(01)01798-0
Brogan DC, Johnson NL: Realistic human walking paths. Proceedings of 16th International Conference on Computer Animation and Social Agents (CASA): 8–9 May 2003; New-Brunswick, New Jersey, USA 2003, 94–101.
Hicheur H, Berthoz A: How do humans turn? Head and body movements for the steering of locomotion. In Proceedings of 5th IEEE-Robotics and Automatic Society International Conference on Humanoid Robots: 2005. Tsukuba: IEEE; 2005:265–270.
Hicheur H, Vieilledent S, Richardson MJE, Flash T, Berthoz A: Velocity and curvature in human locomotion along complex curved paths: a comparison with hand movements. Exp Brain Res 2005, 162:145–54. 10.1007/s00221-004-2122-8
Hicheur H, Pham QC, Arechavaleta G, Laumond JP, Berthoz A: The formation of trajectories during goal-oriented locomotion in humans I. A stereotyped behavior. Eur J Neurosci 2007, 26:2376–90. 10.1111/j.1460-9568.2007.05836.x
Olivier AH, Cretual A: Velocity/curvature relations along a single turn in human locomotion. Neurosci Lett 2007, 412:148–53. 10.1016/j.neulet.2006.11.005
Godi M, Franchignoni F, Caligari M, Giordano A, Turcato AM, Nardone A: Comparison of reliability, validity, and responsiveness of the mini-BESTest and Berg Balance Scale in patients with balance disorders. Phys Ther 2013,93(2):158–67. 10.2522/ptj.20120171
Sreenivasa MN, Frissen I, Souman JL, Ernst MO: Walking along curved paths of different angles: the relationship between head and trunk turning. Exp Brain Res 2008,191(3):313–20. 10.1007/s00221-008-1525-3
Segal AD, Orendurff MS, Czerniecki JM, Shofer JB, Klute GK: Local dynamic stability in turning and straight-line gait. J Biomech 2008,41(7):1486–93. 10.1016/j.jbiomech.2008.02.012
Lowry KA, Brach JS, Nebes RD, Studenski SA, VanSwearingen JM: Contributions of cognitive function to straight- and curved-path walking in older adults. Arch Phys Med Rehabil 2012,93(5):802–7. 10.1016/j.apmr.2011.12.007
Odonkor CA, Thomas JC, Holt N, Latham N, Vanswearingen J, Brach JS, Leveille SG, Jette A, Bean J: A comparison of straight- and curved-path walking tests among mobility-limited older adults. J Gerontol A Biol Sci Med Sci 2013,68(12):1532–9. 10.1093/gerona/glt060
Rosenblatt NJ, Grabiner MD: Measures of frontal plane stability during treadmill and overground walking. Gait Posture 2010, 31:380–4. 10.1016/j.gaitpost.2010.01.002
Young PM, Whitall J, Bair WN, Rogers MW: Leg preference associated with protective stepping responses in older adults. Clin Biomech 2013,28(8):927–32. 10.1016/j.clinbiomech.2013.07.015
Winter DA, Patla AE, Frank JS: Assessment of balance control in humans. Med Prog Technol 1990,16(1–2):31–51.
Smith N, Dyson R, Hale T, Janaway L: Contributions of the inside and outside leg to maintenance of curvilinear motion on a natural turf surface. Gait Posture 2006,24(4):453–8. 10.1016/j.gaitpost.2005.11.007
Wright WG, Ivanenko YP, Gurfinkel VS: Foot anatomy specialization for postural sensation and control. J Neurophysiol 2012,107(5):1513–21. 10.1152/jn.00256.2011
Orendurff MS, Segal AD, Berge JS, Flick KC, Spanier D, Klute GK: The kinematics and kinetics of turning: limb asymmetries associated with walking a circular path. Gait Posture 2006, 23:106–11. 10.1016/j.gaitpost.2004.12.008
Goodworth AD, Peterka RJ: Contribution of sensorimotor integration to spinal stabilization in humans. J Neurophysiol 2009,102(1):496–512. 10.1152/jn.00118.2009
Kobayashi N, Warabi T, Kato M, Kiriyama K, Yoshida T, Chiba S: Posterior-anterior body weight shift during stance period studied by measuring sole-floor reaction forces during healthy and hemiplegic human walking. Neurosci Lett 2006,399(1–2):141–6.
Lepers R, Brenière Y: The role of anticipatory postural adjustments and gravity in gait initiation. Exp Brain Res 1995,107(1):118–24.
Honeine JL, Schieppati M, Gagey O, Do MC: The functional role of the triceps surae muscle during human locomotion. PLoS One 2013,8(1):e52943. 10.1371/journal.pone.0052943
Goodworth A, Chandan A, Chase H, Foster E, Francoeur H, Michaud J, Terry K: Stance width influences frontal plane balance responses to centripetal accelerations. Gait Posture 2013,37(1):98–102. 10.1016/j.gaitpost.2012.06.019
Henry SM, Fung J, Horak FB: Effect of stance width on multidirectional postural responses. J Neurophysiol 2001, 85:559–70.
Zissimopoulos A, Stine R, Fatone S, Gard S: Mediolateral foot placement ability during ambulation in individuals with chronic post-stroke hemiplegia. Gait Posture 2014,39(4):1097–102. 10.1016/j.gaitpost.2014.01.015
Goodworth AD, Mellodge P, Peterka RJ: Stance width changes how sensory feedback is used for multi-segmental balance control. J Neurophysiol 2014,112(3):525–42. 10.1152/jn.00490.2013
Orlin MN, McPoil TG: Plantar pressure assessment. Phys Ther 2000,80(4):399–409.
Yavuz M, Tajaddini A, Botek G, Davis BL: Temporal characteristics of plantar shear distribution: relevance to diabetic patients. J Biomech 2008,41(3):556–9. 10.1016/j.jbiomech.2007.10.008
Acknowledgements
This study was supported, in part, by the ‘Giovani Ricercatori’ grant (GR-2009-1471033), by the ‘Ricerca Finalizzata’ grant (RF-2010-2312497) from the Italian Ministry of Health and by the ‘PRIN’ 2010–2011 grants (2010R277FT and 2010MEFNF7) from the Italian Ministry of University. Dr Rosemary Allpress scrutinized the English.
Author information
Authors and Affiliations
Corresponding author
Additional information
Competing interests
The authors declare that they have no competing interests.
Authors’ contributions
AMT participated in study design, drafting the manuscript, and performed collection and analysis of data; MG conceived the study, and participated in its design, drafting the manuscript; AG was involved in the creation of a new software product in order to analyze the data; MS inspired the study and participated in its design and coordination, and was involved in revising it critically for important intellectual content; AN participated in the study design and coordination, and was involved in revising the manuscript critically for important intellectual content. All authors have read and approved the final manuscript.
Rights and permissions
This article is published under an open access license. Please check the 'Copyright Information' section either on this page or in the PDF for details of this license and what re-use is permitted. If your intended use exceeds what is permitted by the license or if you are unable to locate the licence and re-use information, please contact the Rights and Permissions team.
About this article

Cite this article
Turcato, A.M., Godi, M., Giordano, A. et al. The generation of centripetal force when walking in a circle: insight from the distribution of ground reaction forces recorded by plantar insoles. J NeuroEngineering Rehabil 12, 4 (2015). https://doi.org/10.1186/1743-0003-12-4
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/1743-0003-12-4