
Abstract
In this paper, we are concerned with the theoretical analysis of the bifurcations for a deterministic SIR epidemic model in discrete time. By deriving equations describing flows on the center manifolds, we discuss the transcritical bifurcation at the disease-free equilibrium point and the direction and stability of the flip bifurcation at the positive endemic equilibrium point. We give explicit conditions to check the stability of equilibrium points and the critical parameter for the emergence of a flip bifurcation. For illustrating the theoretical analysis, we also give some numerical simulation examples.
MSC:37N25, 39A11, 92B05.
Similar content being viewed by others

1 Introduction
Since Kermack and McKendrick [1] proposed the Susceptible-Infective-Recovered model (or SIR for short) in 1927, a lot of glorious studies on the dynamics of epidemic models have been presented (see [2–5]). The basic and important research subjects for these systems are local and global stability of the disease-free equilibrium point and the endemic equilibrium point, existence of periodic solutions, persistence and extinction of the disease, etc. According to the dependence on the variable (i.e., time), these systems were classified into two types: continuous-time systems and discrete-time systems.
For the epidemic models, there has been a lot of research focusing on the case of continuous time (see [2–11] and that cited therein). However, discrete-time models (also called difference equations) are also useful for modeling situations of epidemic. They cannot only have the basic features of the corresponding continuous-time models but also provide a substantial reduction of computer time (see [12]). What is more, a lot of discrete-time models are not trivial analogs of their continuous ones and simple models can even exhibit complex behavior. The following two logistic difference equations are such examples that have received much attention (see [13, 14]):
and
As the value of r increases above 2, we have period doubling and eventually chaos.
In view of the above-mentioned reasons, Allen systematically compared the discrete-time SI, SIS, and SIR models with the corresponding continuous-time ones in [15] and later compared deterministic discrete-time SIS and SIR models with stochastic ones in [16]. She showed in [15] that the simple discrete-time SI and SIR models without positive feedback (e.g. recovery or births) to the susceptible class do not have a periodic solution. This behavior is qualitatively similar to that of the continuous counterparts. On the contrary, if there are some types of positive feedback to the susceptible class, the behavior in the discrete-time SI, SIS, and SIR models differs from that of their continuous analogs. The author also showed that for a sufficiently large contact rate the period-doubling and chaotic behavior for the SIS model is possible. However, for the case of the SIR model with positive feedback (births and deaths) the author only obtained the simulation results of periodic behavior. More specific and more in-depth questions, such as the kinds of periodic behavior and the conditions the periodic behavior arises from, have not been studied. Therefore, the following questions will be naturally asked on the discrete-time SIR model with births and deaths.
-
1.
What kinds of periodic behavior may occur?
-
2.
What restriction is enough to guarantee this periodic behavior?
-
3.
Is the period-doubling behavior possible?
As far as we know, there was no literature of theoretical analysis to answer the above questions up till now. In this paper, we pay attention to the theoretical analysis of structural stabilities of the disease-free equilibrium point and the endemic equilibrium point under certain restrictive conditions of α, β, and γ. By applying center manifold theory, we find and prove the existence of a transcritical bifurcation at a disease-free equilibrium point and flip bifurcation (or period-doubling bifurcation) at a positive endemic equilibrium point. The transcritical bifurcation behavior (see Theorem 3.1) shows that when we have the restrictive condition the SIR system has only one equilibrium point (disease-free equilibrium point), when s is slightly away from zero, another equilibrium point (endemic equilibrium point) occurs, and, moreover, their stabilities exchange at . The flip bifurcation behavior (see Theorem 4.1) demonstrates that when the restrictive parameter γ crosses over the critical value slightly with a given direction, two endemic equilibrium points appear and form a period-two orbit (cycle). From these results we properly answer the above question. For illustrating our theoretical conclusions, we also give some numerical simulation examples.
For the literature and more information on bifurcation of the equilibrium point of map, one should refer to the references [17–19] and those cited therein.
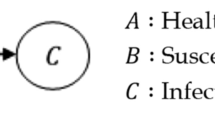
We consider the following deterministic epidemic model studied by Allen [15]:
where , , and represent susceptible, infective, and removed (or isolated) subgroups, respectively, n represents , , Δt is a fixed time interval (e.g., 1 hour or 1 day). It is assumed that , , , and and the parameters are positive, , , . To guarantee the solutions of system (1) to be non-negative for all initial conditions, we further assume (see [15]). It is easy to see that for all time, i.e. the total population size remains constant. is the value of the force of infection (number of contacts that result in infection per susceptible individual in the time interval Δt), is the number of births or deaths per individual during the time interval Δt (number of births = number of deaths) and is the removal number (number of individuals that recover in the time interval Δt). In addition, it is assumed that there are no deaths due to the disease, no recruitment, and no vertical transmission of the disease (all new-born members are susceptible) and that the individual’s recovery leads to immunity.
In order to discuss the model (1) easily, some preliminary transformations will be made hereafter.
Dividing both sides of every equation of (1) by N and performing a scaling
we write (1) in the form
where , , , and . In view of the relation , system (2) becomes the following one:
Rewrite (3) as a planar map F:
Set
It is obvious that . If then the map (4) has only one equilibrium point ; if then it has two equilibrium points and , where
The organization of this paper is as follows. In the next section, we identify all cases of non-hyperbolic and hyperbolic equilibrium points, which is the fundament for all succeeding studies. In Section 3, we discuss the transcritical bifurcation at the disease-free equilibrium point of (1). Section 4 is devoted to the investigation of the direction and stability of the flip bifurcation at the positive endemic equilibrium point by computing a center manifold. In Section 5, some simulations are made to demonstrate our results.
2 Non-hyperbolic and hyperbolic cases
In this section, s, γ will be taken as two parameters and the non-hyperbolic and hyperbolic cases will be discussed in the parameter space of s, γ. For the discussion of the property of equilibrium point we define the notation first:
It is obvious that the domain is divided by the line into two districts and for equilibrium point P (see Figure 1).

Districts for equilibrium point P .
Lemma 2.1 Assume that . The equilibrium point P of (4) has the following properties:
-
(1)
It is non-hyperbolic if and only if lies on the line .
-
(2)
(a) If , it is a saddle node; (b) if , it is a stable node.
Proof The Jacobian matrix of (4) at P is
and its eigenvalues are
-
(1)
From the assumption , we see that . Then non-hyperbolicity happens in the case . In view of and , we know is impossible. From , we get , i.e. , implying that lies on .
-
(2)
(a) When (referred to the case ), the equilibrium point P is a saddle node since . (b) When (referred to the case ), the eigenvalue , then the equilibrium point P is a stable node. The proof is complete. □
For the discussion of the property of the equilibrium point we define the notation
Obviously, the domain is divided by the curves , and into four districts , , , and for equilibrium point Q (see Figure 2).

Districts for equilibrium point Q .
Lemma 2.2 The equilibrium point Q of (4) has the following properties:
-
(1)
It is non-hyperbolic if and only if lies on the curve .
-
(2)
(a) If , it is a stable node; (b) if , it is a saddle node; (c) if , it is a stable focus.
Proof Performing a coordinate shift as follows:
and letting denote the transformed F, we translate the equilibrium point into and discuss the equilibrium point of the map . The matrix of linearization of at is
and its eigenvalues are
-
(1)
It is well known that is hyperbolic if and only if none of the eigenvalues , lies on the unit circle . Denote . In the case of , and are both real. Then the non-hyperbolicity happens when or is 1. For whether or , we get
However, for positive equilibrium point , we have and . Therefore, neither nor is possible. Next, we examine and . From whether or , we get
By condition , we see that . It is easy to check that and if and only if .
-
(2)
When and , the equilibrium point is hyperbolic.
-
(a)
If , the matrix has a double real eigenvalue . It is obvious that . Considering the line and the curve , we can get two intersection points and where and . Then as . This implies . Therefore, the equilibrium point is a stable node in the cases of and .
If , the eigenvalues and are different real numbers. We first discuss the case that , i.e. . In this case we have
Since
we have for . On the other hand, there also exists for . In fact, since
and
we have . Therefore, the equilibrium point is a stable node as .
In the case , i.e. , by a similar method to the above we easily get and the equilibrium point is also a stable node.
-
(b)
We discuss the case that , i.e. . In this case we have
Then, in view of , we have for . By a simple computation one derives for and . Moreover, we have
Then for . This means that the equilibrium point is a saddle for . The proof is complete.
-
(c)
In the case of , and are a pair of conjugate complex. Since
and lie inside of and the equilibrium point Q is a stable focus for the case . □
3 Transcritical bifurcation
In this section we consider the case that , where the transcritical bifurcation at equilibrium point will happen.
Theorem 3.1 A transcritical bifurcation occurs at the equilibrium point P when . More concretely, for a parameter s being slightly less than zero there are two equilibrium points: a stable point P and an unstable negative equilibrium point which coalesce at ; for parameter s being slightly greater than zero there are also two equilibrium points: an unstable equilibrium point P and a stable positive equilibrium point Q. Thus an exchange of stability has occurred at .
Proof For , we have and . Consider s as the bifurcation parameter and write F as to emphasize the dependence on s. One can easily see that the matrix is
and it has eigenvectors
corresponding to and , respectively, where T means the transpose of the matrices. Our goal is to determine the nature of the stability of for s near zero. First, we must put the matrix into a diagonal form.
Using the eigenvectors (6), we obtain the transformation
with inverse
which transforms system (4) into
Rewrite system (9) in the suspended form
Thus, from the center manifold theory (see Theorem 2.1.4 in [18]), the stability of the equilibrium point near can be determined by studying a one-parameter family of maps on a center manifold which can be represented as follows:
for sufficiently small u and s.
We now want to compute the center manifold and derive the mapping on the center manifold. We assume
near the origin, where means terms of order ≥3. By Theorem 2.1.4 in [18], the coefficients a, b, and c can be determined by the equation
Substituting (11) into (12) and comparing coefficients of , us, and in (12), we get
from which we resolve
Therefore the expression of (11) is approximately determined. Substituting (11) into (10), we obtain a one-dimensional map reduced to the center manifold
It is easy to check that
The condition (14) implies that in the study of the orbit structure near the bifurcation point terms of do not qualitatively affect the nature of the bifurcation, namely they do not affect the geometry of the curves of equilibrium points passing through the bifurcation point. Thus, (14) shows that the orbit structure of (13) near is qualitatively the same as the orbit structure near of the map
The map (15) can be viewed as a truncated normal form for the transcritical bifurcation (see [[18], p.365]). The stability of the two branches of equilibrium points lying on both sides of are easily verified. □
Remark 3.1 (The biological explanation of Theorem 3.1)
Because the epidemic model (1) cannot have a negative equilibrium point in real life, when (i.e. ), (1) has only a disease-free equilibrium point which is stable. In this case, for any given initial value with , the state will finally tend to , namely, the final situation of epidemic is free from disease. However, when , a positive equilibrium point will occur. It is an endemic equilibrium point and stable, meanwhile, the disease-free equilibrium point changes to unstable. For any given initial value with , the state will finally tend to .
4 Flip bifurcation
This section is devoted to the analysis for the case , where bifurcation happens at the equilibrium point . From Section 2, we have, for ,
For convenience, we let
Then we have the following theorem.
Theorem 4.1 If , then a flip bifurcation occurs at the equilibrium point when , i.e. and . More concretely, for , an attractive 2-periodic orbit of map F emerges near the equilibrium point when , but the 2-periodic orbit does not exist when , for , a repellent 2-periodic orbit of map F emerges near the equilibrium point when , but the 2-periodic orbit does not exist when .
Proof For , we have and . Consider s as the bifurcation parameter and write as to emphasize the dependence on s, where defined as in Lemma 2.2 is the transformed F from into . Then we have
The matrix has eigenvectors and corresponding to and , respectively, where T means the transpose of matrices. Hence the matrix can be diagonalized by the change of variables , where
Therefore can be changed into the map ,
where .
Rewrite (16) in the suspended form
so as to involve the parameter s explicitly in the discussion. Equivalently, the suspended system (17) has a two-dimensional center manifold of the form
near the origin, where means terms of order ≥3. By Theorem 6 in [[20], pp.34-35], these coefficients a, b, and c can be determined by the equation
where
Comparing coefficients of , us, and in (19), we get
from which we solve
Thus the expression of (18) is determined, i.e.,
Substituting (20) into the first equation in (17), we obtain a one-dimensional map , where
Here we note the dependence of on s. From (21), one can check that
and
as assumed in our theorem. Thus, the conditions () and () of Theorem 3.5.1 in [19] are checked by (22) and (23), respectively. Therefore a flip bifurcation occurs at and a 2-periodic orbit arises as stated in the theorem. □
Remark 4.1 (The biological explanation of Theorem 4.1)
When , the epidemic model (1) has only one positive equilibrium point, i.e. the endemic equilibrium point . If the parameters cross the curve slightly with a given direction, two new positive equilibrium points (assumed to be , ) of model (1) will emerge and form a 2-periodic orbit, i.e. and . Their stabilities are determined by the negative and positive values of , concretely, when they are attractive, when they are repellent.
5 Simulations
In this section, we will give three simulation examples to illustrate the results obtained in the above sections.
Example 5.1 Let , , and choose three groups of initial values for as follows:
If let , we see that and we have Figure 3. If let , we see that and we have Figure 4.

is stable for case of .

is stable for the case of .
From Figures 3 and 4, we see that the conclusion of Theorem 3.1 is well verified by numerical simulation. Namely, for given various initial values for , if slightly, there are a stable point and an unstable negative point which coalesce as , if slightly, point is unstable and positive point is stable. Thus a transcritical bifurcation occurs at the equilibrium point when .
Example 5.2 Let , , and initial value . We easily solve the following equation:
and we get a flip bifurcation parameters and . We also calculate . Then from Theorem 4.1 we know that if let an attractive 2-periodic orbit of map F emerges and if let the 2-periodic orbit does not exist, but a stable equilibrium point occurs. Figures 5, 6, and 7 illustrate this fact.

Flip bifurcation in variable I and parameter γ .

Existence of attractive 2-periodic orbit of map F for .

Occurrence of stable equilibrium point of map F for .
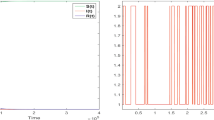
Example 5.3 Let , , and initial value . Using similar method to Example 5.2, we also solve the flip bifurcation parameters and . Moreover, we calculate . Then from Theorem 4.1 we know that if we let slightly an attractive 2-periodic orbit of map F emerges and if let the 2-periodic orbit does not exist, but a stable equilibrium point occurs. Figures 8, 9, and 10 give the numerical illustrations of this conclusion.

Flip bifurcation in variable I and parameter γ .

Occurrence of stable equilibrium point of map F for .

Existence of attractive 2-periodic orbit of map F for .
Additionally, we see from Figure 8 that the flip bifurcation giving a 4-periodic orbit occurs at parameter . The next period doubling takes place at , and so on. But from Figure 5 we do not see this phenomenon because of different parameters being between in Examples 5.2 and 5.3. Indeed, a 4-periodic orbit, an 8-periodic orbit etc. may occur in the region in Example 5.2. However, exceeds the restriction of the parameter γ in our model. Therefore, in Example 5.2 we can only see the emergence of a stable equilibrium point and an attractive 2-periodic orbit.
6 Summary
Discrete-time epidemic models are useful for modeling situations of epidemic. They always exhibit richer and more complicated dynamical behaviors than continuous-time models, though some of them may be considered as approximations to the continuous-time models. Allen [15] gave a systematical comparison between the discrete-time models and the corresponding continuous-time models and showed the periodic behavior (which does not occur in the corresponding continuous cases) for the case of discrete-time model SIR with births and deaths by numerical simulations. To reveal the reason for the resulting periodic behavior of the discrete-time models SIR with births and deaths, we give a sufficient theoretical investigation of this model. Our theoretical analysis focuses on the transcritical bifurcation at the disease-free equilibrium point and the period-doubling bifurcation at endemic equilibrium point. Our analytic conclusions well answer the questions presented in the Introduction section. Using our results, one can check the stability of the above-mentioned equilibrium points and calculate the critical parameter γ for the emergence of a flip bifurcation. Finally, we also present some numerical simulation examples for illustrating our theoretical analysis.
References
Kermack WO, McKendrick AG: Contributions to the mathematical theory of epidemics. Proc. R. Soc. Lond. A 1927, 115: 700–721. 10.1098/rspa.1927.0118
Anderson RM, May RM: Infections Diseases of Humans: Dynamics and Control. Oxford University Press, Oxford; 1991.
Diekmann O, Heersterbeek JAP: Mathematical Epidemiology of Infectious Diseases: Model Building Analysis, and Interpretation. Wiley, New York; 2000.
Murray JD: Mathematical Biology II. 3rd edition. Springer, Berlin; 2003.
Ma Z, Zhou Y, Wang W, Jin Z: Mathematical Modelling and Research of Epidemic Dynamical Systems. Science Press, Beijing; 2004.
Hethcote HW, Stech HW, van den Driessche P: Periodicity and stability in epidemic models. In Differential Equations and Applications in Ecology, Epidemics and Population Problems. Edited by: Busenberg SN, Cooke KL. Academic Press, New York; 1981:65–82.
Takeuchi Y, Ma W, Beretta E: Global asymptotic properties of a delay SIR epidemic model with finite incubation times. Nonlinear Anal. 2000, 42: 931–947. 10.1016/S0362-546X(99)00138-8
Castillo-Chavez C, Yakubu A-A: Disperal, disease and life-history evolution. Math. Biosci. 2001, 173: 35–53. 10.1016/S0025-5564(01)00065-7
Medlock J, Kot M: Spreading disease: integro-differential equations old and new. Math. Biosci. 2003, 184: 201–222. 10.1016/S0025-5564(03)00041-5
Song M, Ma W: Asymptotic properties of a revised SIR epidemic model with density dependent birth rate and time delay. Dyn. Contin. Discrete Impuls. Syst. 2006, 13: 199–208.
Yoshida N, Hara T: Global stability of a delayed SIR epidemic model with density dependent birth and death rates. J. Comput. Appl. Math. 2007, 201: 339–347. 10.1016/j.cam.2005.12.034
Robinson RC: An Introduction to Dynamical Systems: Continuous and Discrete. Pearson Prentice Hall, Upper Saddle River; 2004.
May RM: Simple mathematical models with very complicated dynamics. Nature 1976, 261: 459–467. 10.1038/261459a0
Rasband SN: Chaotic Dynamics of Nonlinear Systems. Wiley-Interscience, New York; 1990.
Allen LJS: Some discrete-time SI, SIR and SIS epidemic models. Math. Biosci. 1994, 124: 83–105. 10.1016/0025-5564(94)90025-6
Allen LJS, Burgin AM: Comparison of deterministic and stochastic SIS and SIR models in discrete time. Math. Biosci. 2000, 163: 1–33. 10.1016/S0025-5564(99)00047-4
Kuznetsov YA: Elements of Applied Bifurcation Theory. Springer, New York; 1995.
Wiggins S: Introduction to Applied Nonlinear Dynamical Systems and Chaos. Springer, New York; 1990.
Guckenheimer J, Holmes P: Nonlinear Oscillations, Dynamical Systems and Bifurcations of Vector Fields. Springer, New York; 1983.
Carr J: Applications of Center Manifold Theory. Springer, New York; 1981.
Acknowledgements
This work has been supported by the NNSF of China (Grant 11161018), the NSF of Guangdong province (Grant s2013010013385), the Science Innovation Project of Department of Education of Guangdong province (Grant 2013KJCX0125) and NSFP of Zhanjiang Normal University (Grant ZL1303). The authors thank the anonymous reviewers for their detailed and insightful comments and suggestions for improvement of the manuscript.
Author information
Authors and Affiliations
Corresponding author
Additional information
Competing interests
The authors declare that they have no competing interests.
Authors’ contributions
Each of the authors, XZ, XL, and WSW, contributed to each part of this study equally and read and approved the final version of the manuscript.
Authors’ original submitted files for images
Below are the links to the authors’ original submitted files for images.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 2.0 International License (https://creativecommons.org/licenses/by/2.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
About this article

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Cite this article
Zhou, X., Li, X. & Wang, WS. Bifurcations for a deterministic SIR epidemic model in discrete time. Adv Differ Equ 2014, 168 (2014). https://doi.org/10.1186/1687-1847-2014-168
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/1687-1847-2014-168