
Abstract
In this paper, the stability of a class of time-delay Takagi-Sugeno (T-S) fuzzy Markovian jumping partial differential equations (PDEs) with p-Laplace and probabilistic time-varying delays is investigated, and the robust exponential stability criterion is obtained by way of some variational methods in Sobolev space , the Lyapunov functional method and the linear matrix inequalities technique. Moreover, a numerical example shows the effectiveness of the proposed methods due to the large allowable variation range of time delay.
Similar content being viewed by others

1 Introduction and preparation
Given a complete probability space with a natural filtration , where Ω is a sample space, ℱ is σ-algebra of a subset of the sample space, and ℙ is the probability measure defined on ℱ. Let and the random form process be a homogeneous, finite-state Markovian process with right continuous trajectories with generator and transition probability from mode i at time t to mode j at time , , if , and if , where is transition probability rate from i to j () and , and .
Let us consider the following delayed Markovian jumping PDEs:
equipped with the initial condition , and zero-boundary condition
where is a standard one-dimensional Brownian motion defined on the probability space. is a positive scalar, is a bounded domain with a smooth boundary ∂ Ω of class by Ω, . In what follows, is always denoted by u for convenience sake. denotes the Hadamard product of matrix and (see [1] or [2]), and satisfies for all j, k, . In mode , we denote and . Denote by the time delay which satisfies for any mode . Functions , , . The boundary condition (1.1a) is called Dirichlet boundary condition if and Neumann boundary condition if . Here, denotes the outward normal derivative on ∂ Ω.
For mode , PDEs (1.1) is simply denoted as
The T-S fuzzy mathematical model with time delay is described as follows.
Fuzzy rule j:
IF is and is THEN
where () is the premise variable, (; ) is the fuzzy set that is characterized by membership function, r is the number of the IF-THEN rules, and s is the number of the premise variables.
For any mode , we assume that , are real constant matrices of appropriate dimensions, and , are real-valued matrix functions which stand for time-varying parameter uncertainties, satisfying
By way of a standard fuzzy inference method, system (1.3) is inferred as follows:
where , , () is the membership function of the system with respect to the fuzzy rule j. can be regarded as the normalized weight of each IF-THEN rule, satisfying and .
Next, we consider the following information for probability distribution of time delays for all :
Here the nonnegative scalar . Define a random variable as follows:
So, in this paper, we consider the following delayed Takagi-Sugeno (T-S) fuzzy Markovian jumping p-Laplace partial differential equations (PDEs) with probabilistic time-varying delays:
where , , and is the Bernoulli distributed sequence, satisfying , and . Here, denotes the mathematical expectation of . Note that the global existence of the solution of system (1.6) was investigated in [3]. To study the stability of (1.6), we need to assume
-
(A1) Let , , and such that , ;
-
(A2) Let , there exists a positive definite diagonal matrix such that , , and ;
-
(A3) There exist constant diagonal matrices , , with , , , such that , , , and .
-
(A4) There exist positive define symmetric matrices , , such that , .
-
(A5) for any mode , and .
In addition, one can assume that is a trivial solution of PDEs (1.6) provided that . For any mode , the parameter uncertainties considered here are norm-bounded and of the following forms:
Here is an unknown matrix function satisfying , and , , are known real constant matrices. Throughout this paper, for a matrix , we denote the matrix . In addition, we denote by I the identity matrix with compatible dimension, and denote .
Lemma 1.1 Let be any given scalar, and ℳ, and be matrices with appropriate dimensions. If , then we have .
Lemma 1.2 ([[2], Lemma 6])
Let be a positive definite matrix, and v be a solution of system (1.6) with boundary condition (1.1a). Then we have
2 Main result
Theorem 2.1 Assume . PDEs (1.6) is global stochastic exponential robust stability in the mean square if there exist a positive scalar and positive definite diagonal matrices (), , and , such that for each , , the following LMI conditions hold:
where ; ; ; ; ; .
Proof Consider the Lyapunov-Krasovskii functional , , where , and = [ + ].
It follows immediately by Lemma 1.2 that .
Let ℒ be the weak infinitesimal operator such that for any given . Then we have
From (A3), we have , + ⩽ , and + ⩽ .
Combining the above inequalities results in , where = ,
and , , .
Further, we can apply the Schur complement [4] to (2.1), and derive by Lemma 1.1. Hence, . Define . From the Dynkin formula, we can derive that . Now, for any and any system mode , the solution of system (1.6) with the initial value ϕ satisfies , , or , , where positive scalars , satisfy and for any mode , scalars , . Therefore, PDEs (1.6) is global stochastic exponential robust stability in the mean square. □
Remark 2.1 As pointed out in [1], diffusion effect exists really in the neural networks when electrons are moving in asymmetric electromagnetic fields [5]. Strictly speaking, reaction-diffusion terms should be considered in any neural networks model [6–8]. Usually, the diffusion behaviors were simulated by linear Laplace diffusion items [9–16]. But not all diffusion behaviors can be simply considered as the linear reaction-diffusion. Indeed, there are various works related to the nonlinear reaction-diffusion [17–21], and even the nonlinear p-Laplace diffusion [17, 20]. So, in this paper, the stability of p-Laplace PDEs was investigated.
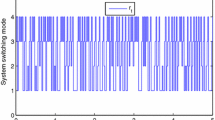
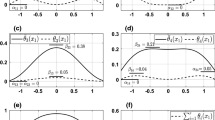
Example 2.1 Consider PDEs (1.6) with the following parameters: , , , , , , , , , , , , . Let ; ; , and , , , , . By using Matlab LMI toolbox, we solve LMI condition (2.1) and obtain , which implies feasible (see [[2], Remark 29(3)] for details). Further, one can extract data as follows:
Then Theorem 2.1 derives that PDEs (1.6) is global stochastic exponential robust stability in the mean square with a large allowable variation range of time delay .
Remark 2.2 To the best of our knowledge, it is the first attempt to investigate the robust stability of T-S fuzzy Markovian jumping Itô-type stochastic dynamic equations with p-Laplace and probabilistic time-varying delays (see [1, 2, 20, 22–25]). Example 2.1 shows the effectiveness of the proposed methods due to the large allowable variation range of time delay.
Remark 2.3 As pointed out in [26], almost all the above related literature did not point out the role that the nonlinear p-Laplace items play, except [1] and [20]. In fact, when , 2-Laplace is the linear Laplace, and there are many papers (see, e.g., [10–13]) in which the Laplace diffusion item plays its role in their stability criteria, for the linear Laplace PDEs can be considered in the special Hilbert space that can be orthogonally decomposed into the direct sum of infinitely many eigenfunction spaces. However, the nonlinear p-Laplace (, ) brings great difficulties for the nonlinear p-Laplace PDEs should be considered in the frame of the Sobolev space that is only a reflexive Banach space. Indeed, owing to the great difficulties, the authors only provide in [1] and [20] the stability criterion in which the nonlinear p-Laplace items play roles in the case of and under the Dirichlet boundary condition. So, a further profound study is very interesting, which may call for some new mathematical methods, and even new mathematical theories. Under the Neumann boundary condition, the problem of the role of the nonlinear p-Laplace () item in the stability criteria for fuzzy stochastic p-Laplace PDEs with probabilistic delays still remains open and challenging.
References
Rao RF, Zhong SM, Wang XR: Stochastic stability criteria with LMI conditions for Markovian jumping impulsive BAM neural networks with mode-dependent time-varying delays and nonlinear reaction-diffusion. Commun. Nonlinear Sci. Numer. Simul. 2014,19(1):258–273. 10.1016/j.cnsns.2013.05.024
Rao RF, Wang XR, Zhong SM, Pu ZL: LMI approach to exponential stability and almost sure exponential stability for stochastic fuzzy Markovian-jumping Cohen-Grossberg neural networks with nonlinear p -Laplace diffusion. J. Appl. Math. 2013., 2013: Article ID 396903
Xu D, Li B, Long S, Teng L: Moment estimate and existence for solutions of stochastic functional differential equations. Nonlinear Anal., Theory Methods Appl. 2014, 108: 128–143.
Boyd SP, Ghaoui LF, Feron F, Balakrishnan V: Linear Matrix Inequalities in Systems and Control Theory. SIAM, Philadelphia; 1994.
Liao X, Yang S, Chen S, Fu Y: Stability of general neural networks with reaction-diffusion. Sci. China, Ser. F 2001,44(5):389–395.
Kao Y, Wang C, Karimi HR, Bi R: Global stability of coupled Markovian switching reaction-diffusion systems on networks. Nonlinear Anal. Hybrid Syst. 2014, 13: 61–73.
Song Q, Cao J: Dynamics of bidirectional associative memory networks with distributed delays and reaction-diffusion terms. Nonlinear Anal., Real World Appl. 2007,8(1):345–361. 10.1016/j.nonrwa.2005.08.006
Song Q, Cao J: Global exponential robust stability of Cohen-Grossberg neural network with time-varying delays and reaction-diffusion terms. J. Franklin Inst. 2006,343(7):705–719. 10.1016/j.jfranklin.2006.07.001
Wang L, Zhang Z, Wang Y: Stochastic exponential stability of the delayed reaction-diffusion recurrent neural networks with Markovian jumping parameters. Phys. Lett. A 2008,372(18):3201–3209. 10.1016/j.physleta.2007.07.090
Pan J, Zhong S: Dynamical behaviors of impulsive reaction-diffusion Cohen-Grossberg neural network with delays. Neurocomputing 2010, 73: 1344–1351. 10.1016/j.neucom.2009.12.013
Pan J, Liu X, Zhong S: Stability criteria for impulsive reaction-diffusion Cohen-Grossberg neural networks with time-varying delays. Math. Comput. Model. 2010, 51: 1037–1050. 10.1016/j.mcm.2009.12.004
Pan J, Zhong S: Dynamic analysis of stochastic reaction-diffusion Cohen-Grossberg neural networks with delays. Adv. Differ. Equ. 2009., 2009: Article ID 410823
Pan J, Zhong S: Novel criteria on global robust exponential stability to a class of reaction-diffusion neural networks with delays. Discrete Dyn. Nat. Soc. 2009., 2009: Article ID 291594
Wang K, Teng Z, Jiang H: Global exponential synchronization in delayed reaction-diffusion cellular neural networks with the Dirichlet boundary conditions. Math. Comput. Model. 2010,52(1–2):12–24. 10.1016/j.mcm.2009.05.038
Zhang X, Wu S, Li K: Delay-dependent exponential stability for impulsive Cohen-Grossberg neural networks with time-varying delays and reaction-diffusion terms. Commun. Nonlinear Sci. Numer. Simul. 2011,16(3):1524–1532. 10.1016/j.cnsns.2010.06.023
Gan Q, Xu R, Yang P: Exponential synchronization of stochastic fuzzy cellular neural networks with time delay in the leakage term and reaction-diffusion. Commun. Nonlinear Sci. Numer. Simul. 2012,17(4):1862–1870. 10.1016/j.cnsns.2011.08.029
Chen J, Guo J: Image restoration based on adaptive P -Laplace diffusion. International Congress on Image and Signal Processing (CISP2010) 2010, 143–146.
Baranwal VK, Pandey RK, Tripathi MP, Singh OP: An analytic algorithm for time fractional nonlinear reaction-diffusion equation based on a new iterative method. Commun. Nonlinear Sci. Numer. Simul. 2012,17(10):3906–3921. 10.1016/j.cnsns.2012.02.015
Meral G, Tezer-Sezgin M: The comparison between the DRBEM and DQM solution of nonlinear reaction-diffusion equation. Commun. Nonlinear Sci. Numer. Simul. 2011,16(10):3990–4005. 10.1016/j.cnsns.2011.02.008
Rao RF, Pu ZL, Zhong SM, Huang JL: On the role of diffusion behaviors in stability criterion for p -Laplace dynamical equations with infinite delay and partial fuzzy parameters under Dirichlet boundary value. J. Appl. Math. 2013., 2013: Article ID 940845
Cherniha R, Davydovych V: Conditional symmetries and exact solutions of nonlinear reaction-diffusion systems with non-constant diffusivities. Commun. Nonlinear Sci. Numer. Simul. 2012,17(8):3177–3188. 10.1016/j.cnsns.2011.12.023
Pan QF, Zhang ZF, Huang JC: Stability of the stochastic reaction-diffusion neural network with time-varying delays and p -Laplacian. J. Appl. Math. 2012., 2012: Article ID 405939 10.1155/2012/405939
Rao R, Zhong S, Wang X: Delay-dependent exponential stability for Markovian jumping stochastic Cohen-Grossberg neural networks with p -Laplace diffusion and partially known transition rates via a differential inequality. Adv. Differ. Equ. 2013., 2013: Article ID 183
Rao R: Delay-dependent exponential stability for nonlinear reaction-diffusion uncertain Cohen-Grossberg neural networks with partially known transition rates via Hardy-Poincaré inequality. Chin. Ann. Math., Ser. B 2014, 35: 575–598. 10.1007/s11401-014-0839-7
Rao R, Pu Z: Stability analysis for impulsive stochastic fuzzy p -Laplace dynamic equations under Neumann or Dirichlet boundary condition. Bound. Value Probl. 2013., 2013: Article ID 133
Pu ZL, Rao RF: Exponential robust stability of TS fuzzy stochastic p -Laplace PDEs under zero-boundary condition. Bound. Value Probl. 2013., 2013: Article ID 264
Acknowledgements
This work is supported by the Scientific Research Fund of Science Technology Department of Sichuan Province (2011JYZ010, 2012JYZ010), and by the Scientific Research Fund of Sichuan Provincial Education Department (11ZA172, 14ZA0274, 12ZB349).
Author information
Authors and Affiliations
Corresponding author
Additional information
Competing interests
The authors declare that they have no competing interests.
Authors’ contributions
XW, the first author of this manuscript, carried out the main part of this manuscript. RR is the corresponding author of this manuscript. All authors typed, read and approved the final manuscript.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (https://creativecommons.org/licenses/by/4.0), which permits use, duplication, adaptation, distribution, and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Wang, X., Rao, R. Robust stability of probabilistic delays fuzzy stochastic p-Laplace dynamic equations. J Inequal Appl 2014, 469 (2014). https://doi.org/10.1186/1029-242X-2014-469
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/1029-242X-2014-469