
Abstract
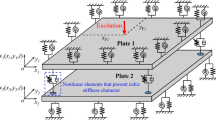
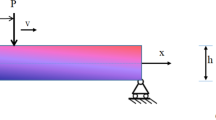
The chapter is addressed at phenomenological mapping and mathematical analogies of oscillatory regimes in hybrid discrete-continuum systems of coupled deformable bodies. Systems consist of connected deformable bodies like plates, beams, belts, or membranes that are coupled through visco-elastic non-linear layer. The layer is modeled by continuously distributed elements of Kelvin–Voigt type with non-linearity of third order. Using the mathematical analogies, the similarities of structural models in systems of plates, beams, belts, or membranes are explained. The mathematical models consist by a set of two coupled non-homogenous partial non-linear differential equations. The proposed solution is divided into space and time domains by classical Bernoulli–Fourier method. In the time domains, the systems of coupled ordinary non-linear differential equations are completely analog for different systems of deformable bodies and are solved using the Krilov–Bogolyubov–Mitropolski asymptotic method. This paper presents the power of mathematical analytical calculus which is similar for physically different systems. The mathematical numerical experiments are a great and useful tool for making the final conclusions between many input and output values. The conclusions about non-linear phenomena in multi-body systems dynamics are revealed from the specific example of double plate’s system stationery and no stationary oscillatory regimes.












Similar content being viewed by others

References
K.R. Hedrih (Stevanović), Transversal vibrations of double-plate systems. Acta Mech. Sin. 22, 487–501 (2006). (Springer (hard cower and on line))
K.R. Hedrih (Stevanović), Double plate system with discontinuity in the elastic bounding layer. Acta Mech. Sin. (2007). https://doi.org/10.1007/s10409-007-0061-x ((corrected proof, in press))
K.R. Hedrih (Stevanović), Integrity of dynamical systems. J. Nonlinear Anal. 63, 854–871 (2005)
K.R. Hedrih (Stevanović), Partial fractional order differential equations of transversal vibrations of creep-connected double plate systems, in Monograph—Fractional Differentiation and Its Applications, ed. by A. Le Mahaute, J.A.T. Machado, J.C. Trigeassou, J. Sabatier (U-Book, 2005), p. 289–302
K.R. Hedrih (Stevanović), Transversal vibrations of the axially moving sandwich belts. Arch. Appl. Mech. (2007). https://doi.org/10.1007/s00419-006-0105-x
K.R. Hedrih (Stevanović), The frequency equation theorems of small oscillations of a hybrid system containing coupled discrete and continuous subsystems. Facta Univ. Ser. Mech. Autom. Control Robot. 5(1), 25–41 (2006). http://facta.junis.ni.ac.yu/facta/
K.R. Hedrih (Stevanović), J. Simonović, Transversal Vibrations of a non-conservative double circular plate system. Facta Univ. Ser. Mech. Autom. Control Robot. (2006)
K. Poltorak, K. Nagaya, A method for solving free vibration problems of three-layered plates with arbitrary shape. J. Acoust. Soc. Am. 78–6, 2042–2048 (1985)
K. Poltorak, K. Nagaya, A method for solving forced vibration problems of three-layered plates with arbitrary shape. J. Acoust. Soc. Am. 80–5, 1408–1413 (1986)
K.R. Hedrih (Stevanović), Frequency equations of small oscillations mixed systems of the coupled discrete and continuous subsystems, Mehanika tverdogo tela (Rigid Body Mechanics), Donetsk, Ukraine, vol. 33, pp. 174–189 (2003) (UDC 531.1:534.012:534.013: ISSN 0321-1975)
K.R. Hedrih (Stevanović), Discrete continuum method, in Computational Mechanics, WCCM VI in Conjunction with APCOM’04, Sept. 5–10, 2004, Beijing, China (Tsinghua University Press & Springer-Verlag, 2004), pp. 1–11
K. R. Hedrih (Stevanović), Modes of the homogeneous chain dynamics. Signal Process. 86, 2678–2702 (2006). www.sciencedirect.com/science/journal/01651684(ISSN: 0165-1684)
K.R. Hedrih (Stevanović), J. Simonović, Characteristic Eigen numbers and frequencies of the transversal vibrations of sandwich system, in SEECCM 06—First South-East European Conference on Computational Mechanics, Proceedings, ed. by M. Kojic, M. Papadrakakis (Kragujevac, 2006), pp. 90–94. http://www.seeccn.kg.ac.yu(ISBN 86-81037-13-7, COBISS.SR-ID 131758092, udc 531/533(082))
K. R. Hedrih (Stevanović), Transveral vibrations of creep connected multi plate homogeneous systems, in CD Proceedings, Fifth EUROMECH Nonlinear Dynamics Conference, Eindhoven University of Technology, ed. by D.H. van Campen, M.D. Lazurko, W.P.J.M. van den Over (2005), pp. 1445–1454 (ID 11-428)
M. Petrović, Fenomenološko Preslikavanje (Phenomenological Mapping) (Srpska kraljevska akademija, Štamparija Planeta, Beograd, 1933). http://elibrary.matf.bg.ac.rs/handle/123456789/475
M. Petrović, Elementi Matematičke Fenomenologije, (Elements of Mathematical Phenomenology) (Srpska kraljevska akademija, Državna Štamparija Kraljevine Srbije, Beograd, 1911). http://elibrary.matf.bg.ac.rs/handle/123456789/476
R. Penrose, The Emperors New Mind: Concerning Computers, Minds and The Laws of Physics (Oxford University Press, Oxford, 1989)
J. Gleick, Chaos: Making a New Science (Vintage, 1987)
D.P. Rašković, Teorija oscilacija, (Theory of oscillations), in Naučna knjiga (1965), p. 503 (in Serbian). http://elibrary.matf.bg.ac.rs/handle/123456789/4754
D.P. Rašković, Analitička mehanika (Analytical Mechanics). Mašinski fakultet Kragujevac (1974). http://elibrary.matf.bg.ac.rs/handle/123456789/3778
K.R. Hedrih (Stevanović), Analogy between models of stress state, strain state and state of the body mass inertia moments. Facta Univ. Ser. Mech. Autom. Control Robot. Nis 1(1), 105–120 (1991)
K.R. Hedrih (Stevanović), Mathematical analogy and phenomenological mapping: vibrations of multi plate and multi beam homogeneous systems, in Scientific Buletletin of the “Politehnica” University of Timisoara, Romania, Transaction on Mechanics, Editura Politenica, Tom 50 (64), Special Issue, 11–18 (2005) (ISSN 1224-6077)
H. Freudenthal, Didactical Phenomenology of Mathematical Structures (Springer, Berlin, 1986)
F. Pfeiffer, P. Fritz, J. Srnik, Nonlinear vibrations of chains. J. Vib. Control 3(4), 397–410 (1997)
R. Walsh, Phenomenological mapping: a method for describing and comparing states of consciousness. J. Transpers. Psychol. 27, 125–5 (1995)
R.I. Kelebanov, M.J. Maldacena, Solving quantum field theories via curved space-times. Phys. Today 68, 28–33 (2009)
K.R. Hedrih (Stevanović), J. Simonović, Multi-frequency analysis of the double circular plate system non-linear dynamics. Nonlinear Dyn. 67(3), 2299–2315 (2012)
K.R. Hedrih (Stevanović), J. Simonović, Non-linear dynamics of the sandwich double circular plate system. Int. J. Non-Linear Mech. 45(9), 902–918 (2010)
K.R. Hedrih (Stevanović), Energy analysis in the nonlinear hybrid system containing linear and nonlinear subsystem coupled by hereditary element. Nonlinear Dyn. 51(1), 127–140 (2007). https://doi.org/10.1007/s11071-007-9197-2
K.R. Hedrih (Stevanović), Energy transfer in the hybrid system dynamics (energy transfer in the axially moving double belt system), Special Issue. Arch. Appl. Mech. 79(6–7), 529–540 (2009). https://doi.org/10.1007/s00419-008-0285-7
D.S. Mitrinović, D.Ž Djoković, Special functions (Specijalne gunkcije) (Gradjevinska knjiga, Beograd, 1964), p. 267
O. A. Goroško, K.R. Hedrih (Stevanović), Analitička dinamika (mehanika) diskretnih naslednih sistema, (Analytical Dynamics (Mechanics) of Discrete Hereditary Systems) (University of Niš, Monograph, 2001), p. 426 (ISBN 86-7181-054-2)
J. Simonović, Dynamics and Stability of Dynamics Hybrid Systems. Doctoral dissertation on Serbian, Faculty of Mechanical Engineering, University of Niš (2012), p. 341
K.R. Hedrih (Stevanović), J. Simonović, Structural analogies on systems of deformable bodies coupled with non-linear layers. Int. J. Non-Linear Mech. 73, 18–24 (2015). https://doi.org/10.1016/j.ijnonlinmec.2014.11.004
Yu.A. Mitropolski, Nelinyeynaya mehanika-Asimptoticcheskie metodi (Institut matematiki NAN Ukraini, Kiev, 1995), p. 397
Yu.A. Mitropolski, N.V. Dao, Lectures on Asymptotic Methods of Nonlinear Dynamics (Vietnam National University Publishing House, Hanoi, 2003), p. 494
M. Petrović, Mecanismes communs aux phenomenes disparates. Paris (1921). http://en.wikipedia.org/wiki/Mihailo_Petrovi%C4%87
K. R. Hedrih (Stevanović), Modes of the homogeneous chain dynamics. Signal Process. 86, 2678–2702 (2006)
K.R. Hedrih (Stevanović), A.N. Hedrih, Phenomenological mapping and dynamical absorptions in chain systems with multiple degrees of freedom. J. Vib. Control. https://doi.org/10.1177/1077546314525984. http://jvc.sagepub.com.proxy.kobson.nb.rs:2048/. http://www.sagepub.co.uk/journal.aspx?pid=105701(ISSN 1077-5463)
Acknowledgements
The paper is a part of the research done within the project OI 174001 of the Serbian Ministry of Education, Science and Technological Development. Five excerpts and Figs. 8, 9, 10, 11, 12 were reprinted from [34] International Journal of Non-Linear Mechanics, 73/7, Katica R. (Stevanovic) Hedrih and Julijana D. Simonovic, Structural analogies of deformable bodies coupled with non-linear layers, Pages No. 18-24, Copyright (2015), with permission from Elsevier (License Number 5114790114946).
Author information
Authors and Affiliations
Corresponding author
Appendices
Appendix A
Appendix B
Rights and permissions
About this article

Cite this article
(Stevanović) Hedrih, K.R., Simonović, J.D. Structural analogies for hybrid discrete-continuum systems of deformable bodies coupled with non-linear layers. Eur. Phys. J. Spec. Top. 230, 3705–3729 (2021). https://doi.org/10.1140/epjs/s11734-021-00250-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1140/epjs/s11734-021-00250-6