
Abstract
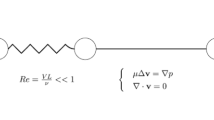
In the realm of low Reynolds number, the shape-changing biological and artificial matters need to break time reversibility in the course of their strokes to achieve motility. This necessity is well described in the so-called scallop theorem. In this work, considering low Reynolds number, a novel and versatile swimmer is proposed as an example of a new scheme to break time reversibility kinematically and, in turn, produce net motion. The swimmer consists of one sphere as a cargo or carried body, joined by one activated link with time-varying length, to another perpendicular rigid link, as the support of two passively flapping disks, at its end. The disks are free to rotate between their fixed minimum and maximum angles. The system’s motion in two dimensions is simulated, and the maneuverability of the swimmer is discussed. The minimal operating parameters for steering of the swimmer are studied, and the limits of the swimmer are identified. The introduced swimming mechanism can be employed as a simple model system for biological living matters as well as artificial microswimmers.
Graphic abstract









Similar content being viewed by others


Data availability
The datasets generated during and/or analyzed during the current study are available from the corresponding author on reasonable request.
References
X. Nassif, S. Bourdoulous, E. Eugène, P.O. Couraud, How do extracellular pathogens cross the blood-brain barrier? Trends Microbiol. 10(5), 227–232 (2002)
J.P. Celli, B.S. Turner, N.H. Afdhal, S. Keates, I. Ghiran, C.P. Kelly et al., Helicobacter pylori moves through mucus by reducing mucin viscoelasticity. Proc. Natl. Acad. Sci. 106(34), 14321–14326 (2009)
H. Fu, S. A. Mirbagheri, Helicobacter pylori Couples Motility and Diffusion to Actively Create a Heterogeneous Complex Medium in Gastric Mucus. In: APS Division of Fluid Dynamics Meeting Abstracts, p. E19–006. (2016)
B.J. Nelson, I.K. Kaliakatsos, J.J. Abbott, Microrobots for minimally invasive medicine. Annu. Rev. Biomed. Eng. 12, 55–85 (2010)
X. Peng, Z. Chen, P.S. Kollipara, Y. Liu, J. Fang, L. Lin et al., Opto-Thermoelectr. Microswimmers. Light: Sci. & Appl. 9(1), 1–12 (2020)
J. Katuri, X. Ma, M.M. Stanton, S. Sánchez, Designing micro-and nanoswimmers for specific applications. Acc. Chem. Res. 50(1), 2–11 (2017)
G.I. Taylor, The action of waving cylindrical tails in propelling microscopic organisms. Proc. R. Soc. Lond. Seri. A Math. Phys. Sci. 211(1105), 225–239 (1952)
G.I. Taylor, Analysis of the swimming of microscopic organisms. Proc. R. Soc. Lond. Seri. A Math. Phys. Sci. 209(1099), 447–461 (1951)
G. Hancock, The self-propulsion of microscopic organisms through liquids. Proc. R. Soc. Lond. Seri. A Math. Phys. Sci. 217(1128), 96–121 (1953)
E. Lauga, Life around the scallop theorem. Soft Matter. 7(7), 3060–3065 (2011)
G.T. Yates, Mechanics of swimming and flying (Stephen Childress). SIAM Rev. 26(4), 596 (1984)
C. Brennen, H. Winet, Fluid mechanics of propulsion by cilia and flagella. Annu. Rev. Fluid Mech. 9, 339–398 (1977)
L.J. Fauci, R. Dillon, Biofluidmechanics of reproduction. Annu. Rev. Fluid Mech. 38(1), 371–394 (2006)
E.M. Purcell, Life at low Reynolds number. Am. J. Phys. 45(1), 3–11 (1977)
S. Kim, S.J. Karrila, Microhydrodynamics: principles and selected applications. Courier Corporation (2013)
G. Rückner, R. Kapral, Chemically powered nanodimers. Phys. Rev. Lett. 98(15), 150603 (2007)
R. Golestanian, T.B. Liverpool, A. Ajdari, Propulsion of a molecular machine by asymmetric distribution of reaction products. Phys. Rev. Lett. 94(22), 220801 (2005)
H. Stark, Artificial chemotaxis of self-phoretic active colloids: collective behavior. Acc. Chem. Res. 51(11), 2681–2688 (2018)
J.F. Brady, Phoretic motion in active matter. J. Fluid Mech. 922, A10 (2021)
M. Vilfan, N. Osterman, A. Vilfan, Magnetically driven omnidirectional artificial microswimmers. Soft Matter. 14(17), 3415–3422 (2018)
R.W. Carlsen, M.R. Edwards, J. Zhuang, C. Pacoret, M. Sitti, Magnetic steering control of multi-cellular bio-hybrid microswimmers. Lab on a Chip. 14(19), 3850–3859 (2014)
E. Lauga, Continuous breakdown of Purcell’s scallop theorem with inertia. Phys. Fluids. 19(6), 061703 (2007)
M. Hubert, O. Trosman, Y. Collard, A. Sukhov, J. Harting, N. Vandewalle et al., The scallop theorem and swimming at the mesoscale. (2020) . arXiv preprint arXiv:2008.08305
E. Lauga, D. Bartolo, No many-scallop theorem: collective locomotion of reciprocal swimmers. Phys. Rev. E. 78(3), 030901 (2008)
R. Trouilloud, S.Y. Tony, A. Hosoi, E. Lauga, Soft swimming: exploiting deformable interfaces for low Reynolds number locomotion. Phys. Rev. Lett. 101(4), 048102 (2008)
T. Qiu, T.C. Lee, A.G. Mark, K.I. Morozov, R. Münster, O. Mierka et al., Swimming by reciprocal motion at low Reynolds number. Nat. commun. 5(1), 1–8 (2014)
A. Montino, A. DeSimone, Three-sphere low-Reynolds-number swimmer with a passive elastic arm. Eur. Phys. J. E. 38(5), 1–10 (2015)
E. Lauga, T.R. Powers, The hydrodynamics of swimming microorganisms. Rep. Prog. Phys. 72(9), 096601 (2009)
A. Ghanbari, M. Bahrami, M.R. Nobari, Methodology for artificial microswimming using magnetic actuation. Phys. Rev. E. 83(4), 046301 (2011)
S. Tottori, B.J. Nelson, Artificial helical microswimmers with mastigoneme-inspired appendages. Biomicrofluidics 7(6), 061101 (2013)
P. Degen, Self-propelling capsules as artificial microswimmers. Curr. Opin. Colloid & Interface Sci. 19(6), 611–619 (2014)
A. Najafi, R. Golestanian, Simple swimmer at low Reynolds number: three linked spheres. Phys. Rev. E. 69(6), 062901 (2004)
R. Ledesma-Aguilar, H. Löwen, J.M. Yeomans, A circle swimmer at low Reynolds number. Eur. Phys. J. E. 35(8), 1–9 (2012)
B. Nasouri, A. Khot, G.J. Elfring, Elastic two-sphere swimmer in Stokes flow. Phys. Rev. Fluids. 2(4), 043101 (2017)
J. Avron, O. Kenneth, D. Oaknin, Pushmepullyou: an efficient micro-swimmer. New J. Phys. 7(1), 234 (2005)
M.A. Jalali, M.R. Alam, S. Mousavi, Versatile low-Reynolds-number swimmer with three-dimensional maneuverability. Phys. Rev. E. 90(5), 053006 (2014)
C. Wischnewski, J. Kierfeld, Snapping elastic disks as microswimmers: swimming at low Reynolds numbers by shape hysteresis. Soft Matter. 16(30), 7088–7102 (2020)
J. Ginsberg. Engineering dynamics. vol. 10. Cambridge University Press (2008)
J. Happel, H. Brenner, Low Reynolds number hydrodynamics: with special applications to particulate media. vol. 1. Springer Science & Business Media (2012)
R.L. Graham, D.E. Knuth, O. Patashnik, Concrete Mathematics, AddisonWesley. Reading. MA. 14, 14 (1994)
Author information
Authors and Affiliations
Contributions
The authors contributed equally to this work.
Corresponding author
Ethics declarations
Conflict of interest
The authors have no competing interests to declare that are relevant to the content of this article.
Appendices
Appendix A ODEs for the case of straight motion
For the case of symmetric constraining angles, the governing ODEs can be derived upon substituting from Eqs. 2 and 3 into Eqs. 12–14 and solving the subsequent linear system of the equations. Considering each phase separately, the ODEs are calculated as:
For the first and third phases:
For the second phase:
For the fourth phase:
By integrating Eq. A1, expansion (contraction) length of the body link in the phase 1 (phase 3) can be found, which is denoted by \(l_{\text {sym}}\) and given in Eq. 16. From the above equations, it is evident that only the second and fourth phases contribute to the swimmer’s displacement over each cycle, as also explained in Sect. 3.
Appendix B General description of the trajectory for an arbitrary cyclic motion of a swimmer in 2D
Here we consider the motion of a cyclic swimmer in the XY plane of the inertial frame XYZ, in which each cycle of motion leads to the resultant translation \(\delta \) and rotation \(\gamma \) as illustrated in Fig. 9.

The trajectory of an arbitrary swimmer (green line) over two cycles (starting from point A and passing point B, which is the swimmer’s final position in the first cycle and the initial position for the second cycle, the swimmer reaches the eventual position at point C in the second cycle). The body-fixed coordinate system \(E_{1}^AE_{2}^AE_{3}^A\) initially coincides with the laboratory frame XYZ
We will show that all initial and final positions of the swimmer in each cycle are concyclic. We consider an arbitrary cycle during the motion of the swimmer, initially starting from point A and reaching point B at the end of this cycle. We assume \(\Theta \) to be the angle between \(\overrightarrow{AB}\), the vector joining point A to point B, and the positive X axis. Without loss of generality, we assume that \(E_{1}^AE_{2}^AE_{3}^A\) is the body-fixed frame initially coinciding with XYZ frame, and \(E_{1}^BE_{2}^BE_{3}^B\) is the same body-fixed frame at the end of the first cycle at point B (Fig. 9). It can be shown that there is a point \({\varvec{o}}_c=(o_{c,1},o_{c,2})\) such that its position (mathematical representation) is the same in both the former and the latter frames (i.e., \({\varvec{o}}_c=(o_{c,1},o_{c,2})_{E_{1}^AE_{2}^AE_{3}^A}=(o_{c,1},o_{c,2})_{E_{1}^BE_{2}^BE_{3}^B}\)). This point can be calculated as
As we obtained the point \({\varvec{o}}_c\) in an arbitrary cycle of the motion, this point has the same property for all the proceeding cycles of the swimmer; thus, it is the center of the circle passing through all the initial and final positions of the swimmer. Each cycle gives rise to the rotation of the body frame about point \(\varvec{o_c}\) with angle \(\gamma \). Thus, the positions of the swimmer at the end of each cycle are concyclic, with \({\varvec{o}}_c\) being the center of the circle. The radius of this circle \(\rho \) can be derived as
The system closes the circle after n cycles of motion, simply calculated as, \(n=\lceil \frac{2\pi }{\gamma }\rceil \), where \(\lceil x\rceil \) is the ceiling function mapping the least integer greater than or equal to x [40]. For small values of \(\gamma \), the noise-free trajectory, analogous to Reference [33], is a circle.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Sheikhshoaei, A., Rajabi, M. Utilizing passive elements to break time reversibility at low Reynolds number: a swimmer with one activated element. Eur. Phys. J. E 46, 15 (2023). https://doi.org/10.1140/epje/s10189-023-00273-y
Received:
Accepted:
Published:
DOI: https://doi.org/10.1140/epje/s10189-023-00273-y