
Abstract
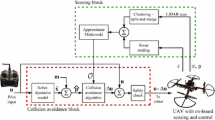
Micro Aerial Vehicles for autonomous explorations of hazardous areas are predestined to support emergency and rescue forces. Especially the autonomous access to buildings is highly demanding due to insufficient GNSS reception in urban terrain and narrow passageways into buildings. Thus, this paper presents a complete flight system, consisting of guidance, navigation and control subsystems. All these elements are designed to enable safe flights into buildings. The guidance subsystem is divided into two parts. The vision based guidance part is manoeuvring the MAV on an intermediate position in front of the building. The potential field based guidance part enables the MAV to fly inside the buildings without having any collisions. For that, neither any prior knowledge about the building structure, nor any maps are necessary. To provide the flight guidance with information about the actual kinematic state of the MAV an accurate and robust navigation system not depending on GNSS measurements is used. The complete system is evaluated using simulated flight data.
Similar content being viewed by others

References
Chen, X. and Zhang, J., The three-dimension path planning of UAV based on improved artificial potential field in dynamic environment, International Conference on Intelligent Human-Machine Systems and Cybernetics (IHMSC), 2013, Bd. 2, pp. 144–147.
He, R., Prentice, S. und Roy, N.„ Planning in information space for a quadrotor helicopter in a GPS-denied environment,“ IEEE International Conference on Robotics and Automation (ICRA), 2008, pp. 1814–1820.
Nieuwenhuisen, M. und Behnke, S., Layered mission and path planning for MAV navigation with partial environment knowledge, in Proceedings of 13th International Conference on Intelligent Autonomous Systems (IAS), Padova, Italy, 2014.
Kim, S., Lee, D., and Kim, H. J., Image based visual servoing for an autonomous quadrotor with adaptive backstepping control, International Conference on Control, Automation and Systems (ICCAS), 2011, pp. 532–537.
Bills, C., Chen, J., and Saxena, A., Autonomous MAV flight in indoor environments using single image perspective cues,“ in IEEE International Conference on Robotics and Automation (ICRA), Shanghai, 2011.
Fahimi, F. and Thakur, K., An alternative closed-loop vision-based control approach for unmanned aircraft systems with application to a quadrotor, in International Conference on Unmanned Aircraft Systems (ICUAS), Atlanta, USA, 2013.
Hrabar, S. und Sukhatme, G., Vision-based navigation through urban canyons, Journal of Field Robotics, Bd. 26, Nr. 5, 2009, pp. 431–452.
Zingg, S., Scaramuzza, D., Weiss, S., and Siegwart, R., MAV navigation through indoor corridors using optical flow, in IEEE International Conference on Robotics and Automation (ICRA), Anchorage, USA, 2010.
Nieuwenhuisen, M., Schadler, M. and Behnke, S., Predictive potential field-based collision avoidance for multicopters, International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences (ISPRS), Bde. %1 von %2XL-1/W2, 2013, pp. 293–298.
Stastny, T., Garcia, G., and Keshmiri, S., Collision and obstacle avoidance in unmanned aerial systems using morphing potential field navigation and nonlinear model predictive control, Journal of Dynamic Systems, Measurement, and Control, Bd. 137, no. 1, 2014.
Crocoll, P., Seibold, J., Frietsch, N., and Trommer, G., Collision-free trajectory planning and local obstacle avoidance for MAVs, in Proceedings of the European Navigation Conference, London, United Kingdom, 2011.
Mejias, L., Saripalli, S., Campoy, P., and Sukhatme, G.S., Visual servoing of an autonomous helicopter in urban areas using feature tracking, Visual Servoing of an Autonoous Helicopter in Urban Areas using Feature Tracking, Bde. %1 von %23-4, no. 23, 2006, pp. 185–201.
Flores, G., Zhou, S., Lozano, R., and Castillo, P., A vision and GPS-based real-time trajectory planning for MAV in unknown urban environments, in International Conference on Unmanned Aircraft Systems (ICUAS), Atlanta, USA, 2013.
Julian, R.C., Rose, C.J., Hu, H., and Fearing, R.S., Cooperative control and modeling for narrow passage traversal with an ornithopter MAV and lightweight ground station, in Proceedings of the 12th International Conference on Autonomous Agents and Multiagent Systems (AAMAS), Saint Paul, USA, 2013.
Popp, M., Crocoll, J., Ruppelt, J., and Trommer, G.F., A novel multi image based navigation system to aid outdoor–indoor transition flights of micro aerial vehicles, in Proceedings of ION GNSS+, Tampa, USA, 2014.
Suzuki, S. and Abe, K., Topological structural analysis of digitized binary images by border following, Computer Vision, Graphics, and Image Processing, Bd. 30, no. 1, 1985, pp. 32–46.
Yaghobi, M., Jadaliha, M., Zolghadr, J., and Norouzi, M., Adaptive line extraction algorithm for SLAM application, in IEEE International Conference on Robotics and Biomimetics, Bangkok, Thailand, 2009.
Bouguet, J., Pyramidal implementation of the affine Lucas Kanade feature tracker description of the algorithm, Intel Corporation, 2001.
Saurer, O., Fraundorfer, F., and Pollefeys, M., Homography based visual odometry with known vertical direction and weak Manhattan world assumption, in IEEE/IROS Workshop on Visual Control of Mobile Robots, 2012.
Hutchinson, S., Hager, G.D., and Corke, P.I. A Tutorial on visual servo control, IEEE Transactions on Robotics and Automation, Bd. 5, no. 12, 1996, pp. 651–670.
Chaumette, F. and Hutchinson, S., Visual servo control, Part I: Basic approaches, IEEE Robotics and Automation Magazine, Bd. 13, 2006, pp. 82–90.
Gans, N.R. und Hutchinson, S.A., An asymptotically stable switched system visual controller for eye in hand robots, in IEEE International Conference on Intelligent Robots and Systems, Las Vegas, USA, 2003.
V. 2. Documentation, Tutorial: How to boost your visual servo control, Lagadic project, 2014.
Chesi, G., Hashimoto, K., Prattichizzo, D., and Vicino, A., Keeping features in the field of view in eyein-hand visual servoing: a switching approach, IEEE Transactions on Robotics, 2004, Bd. 20, no. 5, p. 908–914, 2004.
Khatib, O., Real-time obstacle avoidance for manipulators and mobile robots, IEEE International Conference on Robotics and Automation, 1985, Bd. 2, pp. 500–505.
Koren, Y. and Borenstein, J., potential field methods and their inherent limitations for mobile robot navigation, IEEE International Conference on Robotics and Automation, 1991, Bd. 2, pp. 1398–1404.
Meister, O., Entwurf und Realisierung einer Aufklärungsplattform auf Basis eines unbemannten Minihelikopters mit autonomen Flugfähigkeiten, Karlsruhe, Germany: Institute of Systems Optimization, Karlsruhe Institute of Technology (KIT), 2010.
Chengqing, L., Ang, V.M.H., Krishnan, H., and Lim, S.Y., Virtual obstacle concept for local-minimum-Rrcovery in potential-field based navigation, Proceedings of the IEEE International Conference on Robotics and Automation, 2000, Bd. 2, no. 2, pp. 983–988.
Ge, S.S. and Cui, Y.J., New potential functions for mobile robot path planning, IEEE Transactions on Robotics and Automation, 2000, Bd. 16, no. 5, pp. 615–620.
Koditschek, D.E., Exact robot navigation by means of potential functions: Some topological considerations, IEEE International Conference on Robotics and Automation, 1987, Bd. 4, pp. 1–6.
Volpe, R. and Khosla, P., Manipulator control with superquadric artificial potential functions: Theory and experiments, IEEE Transactions on Systems, Man and Cybernetics, 1990, Bd. 20, no. 6, p. 1423–1436.
Rezaee, H., and Abdollahi, F., Adaptive artificial potential field approach for obstacle avoidance of unmanned aircrafts, Proceedings of the European Navigation Conference, 2012, pp. 1–6.
Hwang, Y.K. and Ahuja, N., A potential field approach to path planning, IEEE Transactions on Robotics and Automation, 1992, Bd. 8, Nr. 1, pp. 23–32.
Gerlach, A.R., Kingston, D., and Walker, B.K., UAV navigation using predictive vector field control, in American Control Conference (ACC), Portland, USA, 2014.
Frietsch, N., Bildbasiertes Navigationssystem eines unbemannten Mini-Helikopters, Berlin: Logos Verlag GmbH, 2012.
Author information
Authors and Affiliations
Corresponding author
Additional information
Published in Giroskopiya i Navigatsiya, 2015, No. 2, pp. 3–17.
Rights and permissions
About this article

Cite this article
Popp, M., Prophet, S., Scholz, G. et al. A novel guidance and navigation system for MAVs capable of autonomous collision-free entering of buildings. Gyroscopy Navig. 6, 157–165 (2015). https://doi.org/10.1134/S2075108715030128
Received:
Published:
Issue Date:
DOI: https://doi.org/10.1134/S2075108715030128