
Abstract
Recently, Maccone and Pati have given two stronger uncertainty relations based on the sum of variances and one of them is nontrivial when the quantum state is not an eigenstate of the sum of the observables. We derive a family of weighted uncertainty relations to provide an optimal lower bound for all situations and remove the restriction on the quantum state. Generalization to multi-observable cases is also given and an optimal lower bound for the weighted sum of the variances is obtained in general quantum situation.
Similar content being viewed by others

Introduction
In Kennard’s formulation1 of Heisenberg’s uncertainty principle2, for any single quantum particle, the product of the uncertainties of the position and momentum measurements is at least half of the Planck constant (see also the work of Weyl3)

Later Robertson4 derived the uncertainty principle for any pair of observables A and B with bounded spectrums:

where ΔA2 = 〈A2〉 − 〈A〉2 is the variance of operator A over the state |ψ〉. Eq. (2) can be derived from a slightly strengthened inequality, the Schrödinger uncertainty relation5

where  and I is the identity operator.
and I is the identity operator.
All these inequalities6,7 can be trivial even if A and B are incompatible on the state of the system |ψ〉, for instance, when |ψ〉 is an eigenstate of either A or B. Despite of this, the variance-based uncertainty relations possess a clear physical meaning and have variety of applications in the theory of quantum information processing such as entanglement detection8,9, quantum spin squeezing10,11,12,13,14 and quantum metrology15,16,17.
Recently Maccone and Pati have presented two stronger uncertainty relations18 based on the sum of variances and their inequalities are guaranteed to be nontrivial when |ψ〉 is not a common eigenstate of A and B. Though there are many formulations of the uncertainty relation in terms of the sum of entropic quantities19,20, Maccone and Pati’s relations capture the notion of incompatibilty except when the state is an eigenstate of the sum of the operators. Their first relation for the sum of the variances is

which is valid for any state |ψ⊥〉 orthogonal to the state of the system |ψ〉 while the sign should be chosen so that ±i〈[A, B]〉 is positive. Denote the right-hand (RHS) of Eq. (4) by  . Their second uncertainty relation also provides a nontrivial bound even if |ψ〉 is an eigenstate of A or B:
. Their second uncertainty relation also provides a nontrivial bound even if |ψ〉 is an eigenstate of A or B:

where  is a state orthogonal to |ψ〉. It is easy to see that the RHS
is a state orthogonal to |ψ〉. It is easy to see that the RHS  of Eq. (5) is nontrivial unless |ψ〉 is an eigenstate of A + B. Moreover, based on the same techniques, Maccone and Pati also obtained an amended Heisenberg-Robertson inequality:
of Eq. (5) is nontrivial unless |ψ〉 is an eigenstate of A + B. Moreover, based on the same techniques, Maccone and Pati also obtained an amended Heisenberg-Robertson inequality:

which reduces to Heisenberg-Robertson’s uncertainty relation when minimizing the lower bound over |ψ⊥〉 and the equality holds at the maximum. The goal of this paper is to give a new method of measuring the uncertainties to remove the restriction on the bounds such as  .
.
Actually, both the entropic uncertainty relations and the sum form of variance based uncertainty relations do not suffer from trivial bounds. Generalizing Deutsch’s entropic uncertainty relation21, Maassen and Uffink22 used certain weighted entropic uncertainties to derive a tighter bound. Adopting a similar idea to the uncertainty relations based on Rényi entropy, we propose a deformed uncertainty relation to resolve the restriction of Maccone-Pati’s variance based uncertainty relation. i.e. the new uncertainty relation will provide a nontrivial bound even when the state is an eigenvector of A + B. Moreover, we show that the original Maccone-Pati’s bound is a singular case in our general uncertainty relation and the usual sum of variances can be extracted from weighted sum of uncertainties. Our work indicates that it seems unreasonable to assume a priori that observables A and B have equal contribution to the variance-based sum uncertainty relation. Our family of uncertainty relations are proved to possess an optimal bound in various situations according to the state of the system. In particular, all previous important variance-based sum uncertainty relations are special cases of our weighted uncertainty relation.
We remark that there is another approach of measurement uncertainty23,24 to the uncertainty principle which deals with joint measurability and measurement-disturbance. Our methods can also be used to generalize the joint measurability, also known as preparation uncertainty23 and to obtain a tighter bound.
Results
We first consider the weighted uncertainty relations based on the sum of variances of two observables, then generalize it into multi-observable cases. All observables considered in the paper will be assumed to be non-degenerate on a finite-dimensional Hilbert space. We will show that our weighted uncertainty relations give optimal lower bounds and all previous important variance-based sum uncertainty relations are special cases of the new weighted uncertainty relation.
Theorem 1 For arbitrary observables A, B and any positive number λ, we have the following weighted uncertainty relation:

which is valid for all  and
and  orthogonal to |ψ〉. If −2i〈[A, B]〉 is negative then one changes its sign in
Eq. (7)
to ensure the RHS is positive.
orthogonal to |ψ〉. If −2i〈[A, B]〉 is negative then one changes its sign in
Eq. (7)
to ensure the RHS is positive.
The equality condition for Eq. (7) holds if and only if  while
while  . Denote the RHS of Eq. (7) by
. Denote the RHS of Eq. (7) by  . Clearly
. Clearly  as a special case of
as a special case of  , as
, as  . When λ varies, one obtains a family of uncertainty relations and the lower bounds
. When λ varies, one obtains a family of uncertainty relations and the lower bounds  provide infinitely many uncertainty relations with weighted contributions for measurements A and B. This will be advantageous when the ratio 〈A〉/〈B〉 is not close to 1.
provide infinitely many uncertainty relations with weighted contributions for measurements A and B. This will be advantageous when the ratio 〈A〉/〈B〉 is not close to 1.
See Methods for a proof of Theorem 1.
Theorem 2 For arbitrary observables A, B and any positive λ, we have the following weighted uncertainty relation:

where the equality holds if and only if  .
.
Denote the RHS of Eq. (8) by  . Note that the lower bound
. Note that the lower bound  is a nontrivial generalization of
is a nontrivial generalization of  , as the latter is a proper bound unless |ψ〉 is an eigenstate of A + B. Even when |ψ〉 is an eigenstate of A + B, the new uncertainty bound
, as the latter is a proper bound unless |ψ〉 is an eigenstate of A + B. Even when |ψ〉 is an eigenstate of A + B, the new uncertainty bound  is also nonzero except for λ = −1 (Equation (8) still holds for any nonzero real λ). This means that in almost all cases the lower bound provided by Eq. (8) is better except for λ = −1 and it compensates for the incompatibility of the observables. Obviously the bound
is also nonzero except for λ = −1 (Equation (8) still holds for any nonzero real λ). This means that in almost all cases the lower bound provided by Eq. (8) is better except for λ = −1 and it compensates for the incompatibility of the observables. Obviously the bound  is a special case of
is a special case of  by canceling |〈ψ|(λA − B)|ψ⊥〉|2 when λ = 1.
by canceling |〈ψ|(λA − B)|ψ⊥〉|2 when λ = 1.
See Methods for a proof of Theorem 2.
Both lower bounds of the weighted uncertainty relations can be combined in a single uncertainty relation for the sum of variances:
Theorem 3 For arbitrary observables A, B and any positive number λ, we have the following weighted uncertainty relation:

Theorems 1 and 2 provide a strengthened uncertainty relation and remove the limitation of the Maccone-Pati bounds. In fact, in the case when |ψ〉 is an eigenstate of A or B, both Heisenberg-Robertson’s and Schrödinger’s uncertainty relations are trivial, nevertheless our lower bound remains nonzero unless |ψ〉 is a common eigenstate of A and B, but this is essentially equivalent to the classical situation. It is also easy to see that if |ψ〉 is an eigenstate of A ± iB, |〈ψ|A ± iB|ψ⊥〉|2 in  will vanish while the term
will vanish while the term  in
in  is still nonzero unless λ = 1. Moreover,
is still nonzero unless λ = 1. Moreover,  will become null when |ψ〉 is an eigenstate of A + B, but at the same time
will become null when |ψ〉 is an eigenstate of A + B, but at the same time  is still nontrivial.
is still nontrivial.
Besides having a nontrivial bound in almost all cases, our weighted uncertainty relations can also lead to a tighter bound for the sum of variances. We give an algorithm to extract the usual uncertainty relation when one of Maccone-Pati’s relations becomes trivial. Choose two λi: λ1 > 1 > λ2 > 0 and enter our uncertainty relations Eq. (7). Denote  , then we have for k = 1, 2
, then we have for k = 1, 2

which always provides a nontrivial lower bound for the sum of variances even when the state is an eigenvector of A + B. This clearly shows that the weighted uncertainty relations can help recover the uncertainties and remove the restriction placed in Maccone-Pati’s uncertainty relation. Furthermore, taking the limit of λi → 1 one has that for k = 1, 2

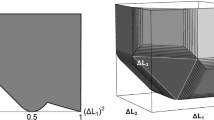
For simplicity we refer to the RHS of Eq. (10) or the derived bound in Eq. (11) as our lower bound of the sum of variances, which usually is a multiple of our bound from the weighted sum (see Fig. 1). In Fig. 1 one will see that our bound  derived in Eq. (11) is alwasy tighter than the Maccone-Pati bound
derived in Eq. (11) is alwasy tighter than the Maccone-Pati bound  . In Eq. (14) we will use another method to show that our bound is tighter than Maccone-Pati’s bound.
. In Eq. (14) we will use another method to show that our bound is tighter than Maccone-Pati’s bound.

Comparison of our bound  with Maccone-Pati’s bound
with Maccone-Pati’s bound  for operators Jx and Jy in a spin one system.
for operators Jx and Jy in a spin one system.
The top solid line is variance sum uncertainty (ΔJx)2 + (ΔJy)2, the middle dotted line is  and the bottom dashed one is
and the bottom dashed one is  .
.
As an example to show our lower bound is tighter, we consider the spin one system with the pure state  ,
,  . Take the angular momentum operators25,26 with ħ = 1:
. Take the angular momentum operators25,26 with ħ = 1:

Direct calculation gives

To compare Macconne-Pati’s uncertainty bound  in Eq. (5) with our bound
in Eq. (5) with our bound  in Eq. (8) (see also Equation (11)), setting λ = 1 we get
in Eq. (8) (see also Equation (11)), setting λ = 1 we get

Also we have (ΔJx)2 + (ΔJy)2 = 1 and  . Suppose |ψ⊥〉 = a|0〉 + b|1〉 + c|2〉 with |a|2 + |b|2 + |c|2 = 1. Using 〈ψ|ψ⊥〉 = 0 we get
. Suppose |ψ⊥〉 = a|0〉 + b|1〉 + c|2〉 with |a|2 + |b|2 + |c|2 = 1. Using 〈ψ|ψ⊥〉 = 0 we get

If we choose  , then
, then  . Subsequently
. Subsequently

On the other hand, if we set a = 0, b = 1, c = 0 then  . Clearly our bound
. Clearly our bound  is tighter than
is tighter than  . The comparison is shown in Fig. 1.
. The comparison is shown in Fig. 1.
We can also consider (ΔJy)2 + (ΔJz)2 and direct computation shows  ,
,  . Choose |ψ⊥〉 = |1〉 then
. Choose |ψ⊥〉 = |1〉 then  . Therefore
. Therefore

Apparently our bound  is better than
is better than  . Figure 2 illustrates the comparison.
. Figure 2 illustrates the comparison.

Comparison of our bound  with Maccone-Pati’s bound
with Maccone-Pati’s bound  for operators Jy and Jz in a spin one system.
for operators Jy and Jz in a spin one system.
The top solid curve is variance sum uncertainty (ΔJy)2 + (ΔJz)2, the middle dotted curve is  and the bottom dashed one is
and the bottom dashed one is  .
.
The bound  is a function of λ. To analyze when
is a function of λ. To analyze when  best approximates (1 + λ)ΔA2 + (1 + λ−1)ΔB2, we define the error function
best approximates (1 + λ)ΔA2 + (1 + λ−1)ΔB2, we define the error function  . At an extremal point λ0, the bound
. At an extremal point λ0, the bound  is closest to the weighted sum and one of the following two conditions must hold. Either f ′(λ0) does not exist or
is closest to the weighted sum and one of the following two conditions must hold. Either f ′(λ0) does not exist or  . If
. If  , then λ = 1 is the extremal point and we call it an equilibrium point of the uncertainty relation. In this case both observables A and B give the same contribution to the uncertainty relation. Usually λ = 1 is not an extremal point, so in general observables A and B contribute unequally to the uncertainty relation.
, then λ = 1 is the extremal point and we call it an equilibrium point of the uncertainty relation. In this case both observables A and B give the same contribution to the uncertainty relation. Usually λ = 1 is not an extremal point, so in general observables A and B contribute unequally to the uncertainty relation.
To see an example of this phenomenon, let’s consider again the quantum state 
 and the angular momentum operators. Choose |ψ⊥〉 = |1〉, then
and the angular momentum operators. Choose |ψ⊥〉 = |1〉, then

while  , hence f(1) > f(λ), ∀λ > 1 (for fixed θ). So for this |ψ〉, Jy and Jz never contribute equally to the uncertainty relation, which explains the need for a weighted uncertainty relation. Figure 3 shows the error function f(λ) and
, hence f(1) > f(λ), ∀λ > 1 (for fixed θ). So for this |ψ〉, Jy and Jz never contribute equally to the uncertainty relation, which explains the need for a weighted uncertainty relation. Figure 3 shows the error function f(λ) and  . In general f is a function of both λ and θ, finding its extremal points involves a PDE equation. For higher dimension quantum states or multi-operator cases, the situation is more complicated.
. In general f is a function of both λ and θ, finding its extremal points involves a PDE equation. For higher dimension quantum states or multi-operator cases, the situation is more complicated.

Error function Eq. (13) of Uncertainty Relation.
The figure shows that the difference between uncertainty relation and its bound for fixed form  becomes less when λ increases, which means that better estimation may be obtained through larger λ.
becomes less when λ increases, which means that better estimation may be obtained through larger λ.
In general, all variance-based sum uncertainty relations can mix in weights to provide an optimal lower bound. To compare the variance-based sum uncertainty relation with weighted uncertainty relation, take the lower bound  for a more detailed analysis: set λ = 1 then
for a more detailed analysis: set λ = 1 then  , it is not only a typical variance-based sum uncertainty relation, but also provides a better lower bound than Maccone-Pati’s lower bound
, it is not only a typical variance-based sum uncertainty relation, but also provides a better lower bound than Maccone-Pati’s lower bound  . Moreover, this lower bound can be further improved by a mixture of weights.
. Moreover, this lower bound can be further improved by a mixture of weights.
Corollary 1 For arbitrary observables A, B and any positive number λ, we have the following weighted uncertainty relation:

where  is a state orthogonal to |ψ〉.
is a state orthogonal to |ψ〉.
Through Eq. (14), it is easy to see  is the special case of λ = 1 and, a fortiori, the lower bound with weights is tighter than the standard one.
is the special case of λ = 1 and, a fortiori, the lower bound with weights is tighter than the standard one.
See Methods for a proof of Corollary 1.
One can study the general weighted sum of variances xΔA2 + yΔB2 based on the special weighted sum (1 + λ)ΔA2 + (1 + λ−1)ΔB2. Theorem 4 details the relationship between the general and special weighted sum uncertainty relations.
Theorem 4 For arbitrary observables A, B and x, y such that xy(x + y) > 0, the following weighted uncertainty relation holds.

See Methods for a proof of Theorem 4.
According to Deutsch21, uncertainty in the result of a measurement of observables A and B should be quantified as an inequality with certain lower bound. One can seek such a bound in a general form  which may not simply be a sum or product by weighted uncertainty relations. For instance, we take
which may not simply be a sum or product by weighted uncertainty relations. For instance, we take  , its bound can be extracted from Theorem 4.
, its bound can be extracted from Theorem 4.
Remark 1 For |ΔA| < 1 and arbitrary observable B,  has a nonnegative lower bound:
has a nonnegative lower bound:

See Methods for a proof of Remark 1.
We now generalize the weighted uncertainty relations to multi-operator cases. To emphasize our point, we recall the trivial generalization from Maccone-Pati’s lower bound.
Lemma 1 For arbitrary observables Ai (i = 1, …, n), we have the following variance-based sum uncertainty relation:

where  is a unit state perpendicular to |ψ〉 while
is a unit state perpendicular to |ψ〉 while  . The RHS of Eq. (17) is nonzero unless |ψ〉 is an eigenstate of
. The RHS of Eq. (17) is nonzero unless |ψ〉 is an eigenstate of  .
.
See Methods for a proof of Lemma 1.
Notice that |ψ〉 can be an eigenstate of  without being that of any Ai, in which case the lower bound is still trivial. However, the bound is not optimal and sometimes becomes trivial when the observables are incompatible in the general situation. We now introduce generalized weighted uncertainty relations to deal with these drawbacks.
without being that of any Ai, in which case the lower bound is still trivial. However, the bound is not optimal and sometimes becomes trivial when the observables are incompatible in the general situation. We now introduce generalized weighted uncertainty relations to deal with these drawbacks.
Theorem 5 For arbitrary n observables A i and positive numbers λ i , we have following sum uncertainty relation:

where  and
and is any unit state ⊥|ψ〉.
is any unit state ⊥|ψ〉.
See Methods for a proof of Theorem 5.
The RHS  of (18) depends on the choice of λi. By the same trick and fixing the (i, j)-term of Eq. (18), we arrive at
of (18) depends on the choice of λi. By the same trick and fixing the (i, j)-term of Eq. (18), we arrive at
Theorem 6 For arbitrary n observables A i and positive numbers λ i , we have following sum uncertainty relation:

where  is orthogonal to |ψ〉,
is orthogonal to |ψ〉,  , and
, and .
.
Clearly,  and all the RHS
and all the RHS  of Eq. (19) comes form Theorem 5. and Theorem 6. respectively can be combined into a single uncertainty relation for variances:
of Eq. (19) comes form Theorem 5. and Theorem 6. respectively can be combined into a single uncertainty relation for variances:
Theorem 7 For arbitrary n observables A i and any positive numbers λ i , we have the following sum uncertainty relation:

When setting λi = λj, the RHS of Eq. (20) is still stronger than Eq. (17), since it keeps all the terms  appearing in Eq. (18). We remark that a default choice of |ψ⊥〉 in Eq. (19) is by Vaidman’s formula27,28:
appearing in Eq. (18). We remark that a default choice of |ψ⊥〉 in Eq. (19) is by Vaidman’s formula27,28:  . We can select suitable λi such that
. We can select suitable λi such that  is nontrivial. They are zero if and only if |ψ〉 is a common eigenstate of all observables, which happens only when the system is equivalent to the classical situation. In this sense our weighted uncertainty relation can handle all possible quantum situations.
is nontrivial. They are zero if and only if |ψ〉 is a common eigenstate of all observables, which happens only when the system is equivalent to the classical situation. In this sense our weighted uncertainty relation can handle all possible quantum situations.
If two or more terms in the RHS of these equality are replaced by the Cauchy-Schwarz’s inequality simultaneously, the corresponding lower bound can not be bigger than the one by replacing just one term. In other words,  is better than the lower bounds by changing more than one term. The LHS of Eq. (20) has only positive coefficients since λi are positive.
is better than the lower bounds by changing more than one term. The LHS of Eq. (20) has only positive coefficients since λi are positive.
Discussions
There are several physical motivations and mathematical considerations behind our method. First, to remove the restriction of one of Macconne-Pati’s uncertainty relations (i.e. when ψ is an eigenstate of A + B) and recover the lower bound for Δ2(A) + Δ2(B), we consider a perturbation of A and B, or rather,  ,
,  (λ > 0). Then
(λ > 0). Then

This means that the lower bound of the sum of variances can be obtained by scaled observables. Actually with the given measurement data of the variances, it is easy to compute the lower bound using our new formula. This is in line with the general strategy of perturbation method, just as many singular properties can be better studied through deformation.
Secondly, the idea of the weighted sum or average is similar to well-known techniques used in both statistical mechanics and mathematical physics. Through the weighted averages one may know better about the whole picture in an unbiased way.
Thirdly, the weighted sum is actually a q-deformation of the original sum of variances. In fact, the sum 2Δ2(A) + 2Δ2(B) is deformed to

where [2] = λ1/2 + λ−1/2 is the quantum integer of 2 used widely in quantum groups, Yang-Baxter equations and quantum integrable systems or statistical mechanics. The opposite phase factors λ±1/2 in front of the variances reflect a balance of the weighted distribution.
Last but not the least, the usual sum of variances can be solved from our weighted sums (see Eqs (10, 11)) and the derived bound is proved to be tighter than the original bound of Maccone-Pati’s bound.
Conclusions
The Heisenberg-Robertson and Schrödinger uncertainty relations have been skillfully generalized by Maccone and Pati in order to capture the concept of incompatibility of the observables A and B on the quantum system |ψ〉. Although other generalizations of Maccone-Pati’s relations have been considered29 by refining the RHS, our generalization provides a non-trivial lower bound in all quantum situations. One of Maccone-Pati’s relations becomes trivial when |ψ〉 is an eigenstate of A + B. To remove the restriction of their relation, we have proposed a weighted uncertainty relation to obtain a better lower bound for the sum of the variances. The parametric uncertainty relations form a family of Bohr-type inequalities and take into account of individual contribution from the observables so that they are nontrivial in almost all cases except when |ψ〉 is a common eigenstate of all observables. In particular, Maccone-Pati’s uncertainty relations are special cases of our deformed weighted uncertainty relations. Furthermore, we have shown that the sum of variances can be extracted from our weighted sums and our derived bound is always tighter than Maccone-Pati bound  (see discussion before Equation (11)). We have also derived weighted uncertainty relations for multi-observables and the lower bound has been proved to be optimal in all quantum cases.
(see discussion before Equation (11)). We have also derived weighted uncertainty relations for multi-observables and the lower bound has been proved to be optimal in all quantum cases.
Methods
Proof of Theorem 1 We start by recalling the parallelogram law in Hilbert space. Let A and B be two observables and |ψ〉 a fixed quantum state. One has that

for any |α| = 1. Since  ,
,  , we can obtain Eq. (4) when α = ±i and Eq. (5) when α = 1. Note that
, we can obtain Eq. (4) when α = ±i and Eq. (5) when α = 1. Note that  may be zero even if A and B are incompatible. For example this happens if |ψ〉 is an eigenstate of A + B. Our idea is to consider a perturbation of A + B, or A and B to fix this. We consider the generalized parallelogram law in Hilbert space in the following form:
may be zero even if A and B are incompatible. For example this happens if |ψ〉 is an eigenstate of A + B. Our idea is to consider a perturbation of A + B, or A and B to fix this. We consider the generalized parallelogram law in Hilbert space in the following form:

where λ is a nonzero real number and  with modulus one. In fact, the identity can be easily verified by expanding Δ(A − αB)2 and λ−1Δ(λA + αB)2 using
with modulus one. In fact, the identity can be easily verified by expanding Δ(A − αB)2 and λ−1Δ(λA + αB)2 using  .
.
We now derive the weighted uncertainty relation in the form (1 + λ)ΔA2 + (1 + λ−1)ΔB2. Since  , combine with Cauchy-Schwarz inequality completes the proof.
, combine with Cauchy-Schwarz inequality completes the proof.
Proof of Theorem 2 If we set α = −1 in Eq. (23), then we get the result directly.
Proof of Corollary 1 For λ > 0, set  (see Equation (21)), so
(see Equation (21)), so

where the RHS  satisfies that
satisfies that  which implies that the weighted uncertainty relation is better than the ordinary sum:
which implies that the weighted uncertainty relation is better than the ordinary sum:  . Followed by parameter transformation, we get Eq. (14).
. Followed by parameter transformation, we get Eq. (14).
Proof of Theorem 4 For arbitrary weighted uncertainty relation xΔA2 + yΔB2, denote  , then
, then

Set  , then λ−1 = f(x, y)y − 1. Thus
, then λ−1 = f(x, y)y − 1. Thus

Proof of Remark 1 Since

with x = 1,  ,
,  and
and  , we get
, we get

thus

The right-hand is a positive lower bound of uncertainty relation  .
.
Proof of Lemma 1 We recall Maccone-Pati’s lower bound  using a different method.
using a different method.
Note that  and
and  , therefore
, therefore  . The physical meaning is that the total ignorance of an ensemble of quantum states is less than or equal to the sum of individual ignorance. This means that the sum of uncertainties obeys the convexity property30:
. The physical meaning is that the total ignorance of an ensemble of quantum states is less than or equal to the sum of individual ignorance. This means that the sum of uncertainties obeys the convexity property30:

Let  . It follows from Eq. (30) that
. It follows from Eq. (30) that

where  is a unit state perpendicular to |ψ〉.
is a unit state perpendicular to |ψ〉.
Proof of Theorem 5 Using the generalized parallelogram law and Bohr’s inequality31,32,33,34,35,36, we obtain the following relation:

where  ,
,  and λ1, …,λn are positive real numbers. Combining with Cauchy-Schwarz inequality, we derive Eq. (18).
and λ1, …,λn are positive real numbers. Combining with Cauchy-Schwarz inequality, we derive Eq. (18).
Additional Information
How to cite this article: Xiao, Y. et al. Weighted Uncertainty Relations. Sci. Rep. 6, 23201; doi: 10.1038/srep23201 (2016).
References
Kennard, E. H. Zur Quantenmechanik einfacher Bewegungstypen. Z. Phys. 44, 326 (1927).
Heisenberg, W. Über den anschaulichen Inhalt der quantentheoretischen Kinematik und Mechanik. Z. Phys. 43, 172 (1927).
Weyl, H. Gruppentheorie und Quantenmechanik. (Hirzel, Leipzig).
Robertson, H. P. The uncertainty principle. Phys. Rev. 34, 163 (1929).
Schrödinger, E. Zum Heisenbergschen Unschärfeprinzip. Ber. Kgl. Akad. Wiss. Berlin 24, 296 (1930).
Busch, P., Heinonen, T. & Lahti, P. J. Heisenberg’s uncertainty principle. Phys. Rep. 452, 155 (2007).
Busch, P., Lahti, P. & Werner, R. F. Colloquium: Quantum root-mean-square error and measurement uncertainty relations. Rev. Mod. Phys. 86, 1261 (2014).
Gühne, O. Characterizing entanglement via uncertainty relation. Phys. Rev. Lett. 92, 117903 (2004).
Hofmann, H. F. & Takeuchi, S. Violation of local uncertainty relations as a signature of entanglement. Phys. Rev. A 68, 032103 (2003).
Walls, D. F. & Zoller, P. Reduced quantum fluctuations in resonance. Phys. Rev. Lett. 47, 709 (1981).
Wódkiewicz, K. & Eberly, J. Coherent states, squeezed fluctuations and the SU(2) and SU(1,1) groups in quantum-optics applications. J. Opt. Soc. Am. B 2, 458 (1985).
Wineland, D. J., Bollinger, J. J., Itano, W. M., Moore, F. L. & Heinzen, D. J. Spin squeezing and reduced quantum noisd in spectroscopy. Phys. Rev. A 46 R6797 (1992).
Kitagawa, M. & Ueda, M. Squeezed spin states. Phys. Rev. A 47, 5138 (1993).
Ma, J., Wang, X. G., Sun, C. P. & Nori, F. Quantum spin squeezing. Phys. Rep. 509, 89 (2011).
Giovannetti, V., Lloyd, S. & Maccone, L. Quantum-enhanced measurements: beating the standard quantum limit. Science 306, 1330 (2004).
Giovannetti, V., Lloyd, S. & Maccone, L. Quantum metrology. Phys. Rev. Lett. 96, 010401 (2006).
Giovannetti, V., Lloyd, S. & Maccone, L. Advances in quantum metrology. Nat. Photon. 5, 222 (2011).
Maccone, L. & Pati, A. K. Stronger uncertainty relation for all incompatible observables. Phys. Rev. Lett. 113, 260401 (2014).
Wehner, S. & Winter, A. Entropic uncertainty relations-a survey. New J. Phys. 12, 025009 (2010).
Coles, P. J., Berta, M., Tomamichel, M. & Wehner, S. Entropic uncertainty relations and their Applications. arXiv: 1511.04857 (2015).
Deutsch, D. Uncertainty in quantum measurements. Phys. Rev. Lett. 50, 631 (1983).
Maassen, H. & Uffink, J. B. M. Generalized entropic uncertainty relations. Phys. Rev. Lett. 60, 1103 (1988).
Busch, P., Lahti, P. & Werner, R. F. Proof of Heisenberg’s Error-Disturbance Relation. Phys. Rev. Lett. 111, 160405 (2013).
Busch, P., Lahti, P. & Werner, R. F. Heisenberg uncertainty for qubit measurements. Phys. Rev. A 89, 012129 (2014).
Rivas, Á. & Luis, A. Characterization of quantum angular-momentum fluctuations via principal components. Phys. Rev. A 77, 022105 (2008).
Chen, B. & Fei, S. M. Sum uncertainty relations for arbitrary N incompatible observables. Scientific Reports 5, 14238 (2015).
Vaidman, L. Minimum time for the evolution to an orthogonal quantum state. Am. J. Phys. 60, 182 (1992).
Goldenberg, L. & Vaidman, L. Applications of a simple quantum mechanical formula. Am. J. Phys. 64, 1059 (1996).
Yao, Y., Xiao, X., Wang, X. & Sun, C. P. Implications and applications of the variance-based uncertainty equalities. Phys. Rev. A 91, 062113 (2015).
Pati A. K. & Sahu, P. K. Sum uncertainty relation in quantum theory. Phys. Lett. A 367, 177 (2007).
Eğecioğlu, O. Parallelogram-law-type identities. Linear Algebra Appl. 225, 1 (1995).
Hirzallah, O., Kittaneh, F. & Moslehian, M. S. Schatten p-norm inequalities related to a characherization of inner product spaces. Math. Inequal. Appl. 13, 235 (2010).
Kato, M. A note on a generalized parallelogram law and the Littlewood matrices. Bull. Kyushu Inst. Tech. Math. Natur. Sci. 33, 37 (1986).
Zeng, W. L. An extension of the parallelogram characterization of inner product spaces. J. Math. Res. Exposition 2, 23 (1982).
Moslehian, M. S. An operator extension of the parallelogram law and related norm inequalities. Math. Inequal. Appl. 14, 717 (2011).
Zhang, F. On the Bohr inequality of operators. J. Math. Anal. Appl. 333, 1264 (2007).
Acknowledgements
We are grateful to Jian Wang and Yinshan Chang for fruitful discussions. We also thank Chunqin Zhou and Huihui Qin for their interest in the work. The project is supported by NSFC (grant Nos 11271138, 11531004), CSC and Simons Foundation 198129.
Author information
Authors and Affiliations
Contributions
Y.X. and N.J. wrote the main manuscript text. They also analysed the results and reviewed the manuscript together with X.L.-J. and S.-M.F.
Ethics declarations
Competing interests
The authors declare no competing financial interests.
Rights and permissions
This work is licensed under a Creative Commons Attribution 4.0 International License. The images or other third party material in this article are included in the article’s Creative Commons license, unless indicated otherwise in the credit line; if the material is not included under the Creative Commons license, users will need to obtain permission from the license holder to reproduce the material. To view a copy of this license, visit http://creativecommons.org/licenses/by/4.0/
About this article

Cite this article
Xiao, Y., Jing, N., Li-Jost, X. et al. Weighted Uncertainty Relations. Sci Rep 6, 23201 (2016). https://doi.org/10.1038/srep23201
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/srep23201
- Springer Nature Limited
This article is cited by
-
Strong majorization uncertainty relations and experimental verifications
npj Quantum Information (2023)
-
Uncertainty from the Aharonov–Vaidman identity
Quantum Studies: Mathematics and Foundations (2023)
-
Quantum Correlations in Symmetric Multiqubit Systems
Journal of the Indian Institute of Science (2023)
-
The tripartite quantum-memory-assisted entropic uncertainty relation and upper bound on shareability of quantum discord
Scientific Reports (2022)
-
Quantum-Memory-Assisted Entropic Uncertainty Relation in the Heisenberg XXZ Spin Chain Model with External Magnetic Fields and Dzyaloshinski-Moriya Interaction
International Journal of Theoretical Physics (2022)