
Abstract
With the ever-pressing challenges of societal ageing, robotic technologies for older people are increasingly portrayed as a solution for better independent living for longer. However, the application of human-following robots for elderly citizens has not yet been considered, and any prospective benefits offered by the technology for active ageing have previously been overlooked. This qualitative research aimed to explore older people’s needs and requirements towards the human-following robot through the reflexive thematic analysis of semi-structured interview data from 17 independent older adults, supported by a video-based demonstration of the robot. The results indicate that older people believed that human-following robot has the potential to provide social benefits to an independent older adult by encouraging walking trips and prompting social interaction with others in the community. Practical limitations and cost of the robot are barriers to adoption at present. The findings indicate that there is potential for human-following robots to support active ageing, through increasing opportunities for the social participation of an older adult, but further development of the robot is needed for this potential to be realised.
Similar content being viewed by others


Explore related subjects
Find the latest articles, discoveries, and news in related topics.Introduction
The world is currently facing the challenge of an increasing ageing population, with the global population of individuals aged 65 or older expected to surpass 1.5 billion by 2050, twice the reported number in 20201. In the UK, it is projected that 24% of the population will be aged 65 or above by 2043, up from 19% at present2. The ageing of the population has diverse societal implications, ranging from the provision of pensions and healthcare to the overall accessibility of consumer goods and services3. Also, the significant shifts in the ageing population’s composition could pose new challenges for transportation sector, particularly as the travel patterns and requirements of older people are potentially to become increasingly complicated4. Mobility and social interaction are essential components of healthy and active aging, which are strongly linked to improved health, wellbeing, and overall quality of life3,5,6,7,8,9,10. It has been generally acknowledged that mobility is strongly associated with older people’s engagement of activities, community involvement, life satisfaction as well as physical and mental health4,11. Additionally, it is recognised that physical activity has significant impact on older people’s physical and cognitive health12. However, age-related health problems, sensory, cognitive, and physical impairments significantly affect the mobility and physical activities of older individuals6,13,14. The ageing process is also strongly associated with social isolation and loneliness, which can adversely affect older people's behavioural, psychological, and physiological wellbeing15. Although loneliness can affect individuals of any age, older people are particularly susceptible to experiencing social isolation16. To promote healthy aging and support older adults in living safe, comfortable, and independent lives, there is an urgent need to develop innovative technologies that can help them maintain their health and wellbeing, foster social connections with society, communities, family, and friends6,7,17.
The rapid development of robotic technology has the potential to provide direct support for older individuals in terms of physical activity, mobility, and social interaction, thereby enabling them to maintain their independence and overall wellbeing18. Previous research has studied a wide range of robots that have been created to assist older adults in various ways. These robots can be categorised according to the type of support and assistance they provide to older people.
Previous research has studied robots that are specifically designed to provide physical support to older people and assist them in the daily tasks of independent living. Johnson et al.19 explored older people’s requirements towards the mobile service robot. According to their findings, older people required the robot to have features that would enhance their perception of independence and freedom, while also facilitate their social interaction and perception in recreational activities. In addition, by incorporating an innovative robotic arm into the mobile service robot and deploying it at a care facility for older people, Mucchiani et al.20 investigated how older people interacted with the robot. The study found that based on the feedback gathered after the interaction, the robot was highly accepted as a useful assistant among older people. Furthermore, a study by Mucchiani et al.21 evaluated older people’s interaction with an autonomous mobile robot in everyday situation, using use cases such as water delivery, walking encouragement and pain assessment. Their research revealed that older people regarded the robot as useful, and their level of acceptance grew with increased interaction. Previous studies have also explored the possibility of a robot serving as a walking partner for older people. A study by Karunarathne et al.22 investigated whether older people would accept a humanoid robot, the wheeled Roobvie-R3, as a walking partner. The experiment involved 20 older adults aged between 60 and 73 years. The aim of their research was to explore whether the robot would make older people’s walking to be easier and more enjoyable, as well as whether they had a greater intention to walk with it. The results revealed that older people were significantly more inclined to walk with the robot than without it, although there was no notable effect on ease or enjoyment. Notably, some participants likened the robot to a pet, a child/grandchild, or a friend. Additionally, 40% of participants believed that the robot needed additional daily-life functions, which could be addressed through a human-following robot equipped with cargo-carrying capabilities. Their research22 has been validated by a later study by Nomura et al.23, which also utilised the Roobvie-R3 and found that the robot enhances participants' motivation to walk with it. In contrast to the earlier study, they found that participants derived greater enjoyment from walking with the robot. This appears to contradict the prior findings, but the difference can be explained by the fact that this study examined the robot's use among cognitively impaired adults in a care facility, which was not the case in the earlier literature.
Robot can also play a significant role in supporting the mental and psychological wellbeing of older people by providing companionship, reducing loneliness and social isolation, and facilitating communication between older people and their family and friends. Companion robots resemble humans or animal like have shown potential in improving older people’s mental and psychological health. For example, Chen et al.24 deployed a humanoid companion robot (Kabochan) in several long-term care facilities. They have found the humanoid companion robots are potentially effective in reducing short-term neuropsychiatric symptoms and improving the quality of life of older people with dementia while also reducing the burden on their caregivers. Their study emphasized that it is crucial to acknowledge that the use of robots should be customized to meet the needs and requirements of different end-users, and this process necessitates ongoing observation. The reason being, the efficacy of robot-assisted applications can vary from one individual to another, and not everyone may react positively24. Also, Robinson et al.25 evaluated a companion robot (Paro) by exploring older people’s interaction with it in a residential care facility. They found interacting with the robot significantly reduced the systolic and diastolic blood pressure among older people and concluded that animal-shaped companion robots had positive effects on the health of older people, similar to live animals.
Furthermore, previous research has explored the robots designed for health and safety monitoring. Such robots can support older individuals by observing and analysing their health and safety conditions and responding accordingly. Tseng et al.26 designed a robotic system that can track the health conditions of older people according to clinical and medical knowledge and expertise. The robot is integrated with an user-friendly interface for older people and is capable to transmit important or emergency notifications to caregivers automatically. Older people in the study provided highly positive feedback for the system. In addition, Broadbent et al.27 explored the design requirements of health-care robots with the key stakeholders, including residents, managers and caregivers in a retirement community. Their research revealed that robot functions such as fall detections, signalling for help, lifting, and monitoring location were perceived as most useful by key stakeholders. Moreover, Sumiya et al.28 designed a mobile robot for providing real-time detection of falls among older people and facilitating immediate communication with their family and helpers. The robot was found to be able to significantly increase the fall detection rate compared to traditional fall detection methods using fixed sensors.
Statement of the problem and research gaps
The review of existing research about robot and olde people suggest that the rapid development and swift progress of robotic technologies potentially enhance their quality of life and benefit their health and wellbeing. However there remain significant areas that necessitate further research.
To begin with, previous research on robots and older people has mainly focused on examining human–robot interaction in indoor environments, such as households or healthcare facilities. While it is certainly important to ensure older people live independently and maintain their health within their own homes or healthcare facilities, outdoor activities such as walking also play a critical role in promoting the physical and psychological wellbeing of older people11,29. Walking has been recognised as an active mode of mobility, involving low-intensity physical activity for residents and it offers significant economic, safety, environmental, social and health benefits as a means of transportation11. One of the prevailing trends in contemporary robotics is the collaboration between humans and robots, where robots serve as collaborative assistants and partners in shared tasks, one important use case is the human-following scenario where a human and a robot collaborate on a common task or a daily activity that requires the robot following the movements of the human30. However, it remains unclear what the needs and requirements of older people are when it comes to utilizing human-following robots for outdoor walking activities. Though there has been extensive research on the use of robots for older adults, there is a trend of focusing on older people with cognitive or physical impairments, and the existing literature often fails to acknowledge the older people as a non-homogeneous group6,31,32. While many studies have demonstrated the effectiveness of robots in medical and care-home settings, there is still a lack of research on the use of human following robots to support older individuals living independently in the community. Secondly, although some previous research discovered that robot innovations, such as companion robots, have the potential to enhance social inclusion and reduce loneliness among older people, there is an important concern with such companion robots. These robots mainly offer companionship through human–robot interactions, which could potentially diminish and displace human interaction and relationships33. It is still unclear about whether human-following robots can be utilized and designed to enhance the existing social relationships of older people and encourage new social connections and interactions with others within their communities when walking in outdoor environment. Moreover, to date, there are limited research adopting a human-centred design and incorporating the older people in the design and evaluation process of outdoor human-following robots. Knowledge regarding how an age-friendly human-following robot could be designed to meet older persons’ requirements and integrate into their daily lives to support healthier ageing is significantly under-researched.
It is therefore imperative to address the above knowledge gaps which will ensure that development, production, and business strategies for human following robots are optimised for the benefit for both individuals and society. The potential consequences for neglecting to do so may result in the robots being unusable and inaccessible for older people, thereby hindering their expected benefits in helping older people live independently and healthily for longer periods of time.
Purpose of this study
To fill the research gaps identified above, this paper aims to explore older people’s attitudes, needs and requirements towards the human-following robot in order to provide new knowledge for facilitating the design of age-friendly human-following robots.
Method
Apparatus
The human-following robot adopted in this study is the Piaggio Fast Forward’s Gita robot, as shown in Fig. 1. It is designed to follow humans while also being able to carry cargo. This robot can move on its own wheels and can carry up to 18 kg of items in its internal cargo compartment as it follows its user. The robot operates with depth and colour sensing technology to track and respond to obstacles in its environment while following its user. This device is suitable for use both indoors and outdoors, and it is commonly used in urban settings. The robot is capable of navigating ramps with a maximum gradient of 16%, similar to how a wheelchair or stroller would. However, it needs human aid to move through stairs and kerbs. It has a travel range of up to 4 h (12 miles) on a full battery charge, and its maximum speed is 6 mph, which it adjusts based on the user's pace.

The human-following robot (Gita) used in this study.
Participants
To be eligible to participate in this study, a participant was required to be aged 60 years and over, be healthy, and live independently or with a partner. The age threshold of 60 years has been widely adopted in defining older people34,35,36 and it has also been used by previous research about ageing and mobility technologies6,14,37.
Participants were recruited across the UK and from a user group of older people called the U3A (University of the Third Age, an organisation aimed at the education and stimulation of older adults). In total, 17 older people (mean = 75.29 years, min = 61 years, max = 84 years, SD = 6.85 years; 6 male, 11 female) participated in this study. The sample size was determined based on the approximate point of data saturation, where the data collection completed once no future new information was obtained from additional interview sessions7,38. The participants’ walking and shopping habits is displayed in Fig. 2.

Walking and Shopping frequency of participants.
Research design and data collection
The nature of this study is qualitative and exploratory in accordance with the research aim, which is to expand and enhance comprehension about the needs and requirements of older people regarding the human-following robot. Qualitative research is not for generalization but endeavours to provide a comprehensive and contextualized comprehension of the human experience39. To collect qualitative data, focus groups and individual interviews are the most common methods40,41. The semi-structured individual interviews were deemed to be more suitable for this study as that participants could be provided more time to fully understand the robot use cases and interview topics and articulate their thoughts7.
Before expressing their views regarding the key topics of this study, participants would need to understand and be familiar with the human-following robot use cases in outdoor environment. A video of a short shopping trip with the robot was used, as shown in Fig. 3. At the beginning of the video, the robot is shown in a seated position through a 360° rotation. In the following scene, the user is seen approaching the robot and pressing the Ready/Park button and the Pair/Unpair button to make it stand up and pair. After that, the robot proceeds to follow the user. Subsequent scenes portray the robot accompanying the user on a walk to a local shop in an urban setting. Afterward, the user enters the shop with the robot following and proceeds to walk around while the robot follows her, moving through the shop aisles as she selects her desired items. After this, the user leaves the shop and places her shopping in the cargo hold of the robot. After pairing with the robot, she then walks towards a pedestrian crossing nearby. In the following scene, the user is seen heading towards a local football stadium before pausing to sit and rest on the robot while eating one of the bananas she bought. The final scenes show the user and robot returning to the building where the robot is stored.

The screenshots of the video featuring a short shopping trip using the human-following robot (Gita).
Interviews would be restricted to a 30-min total duration, including completion of the demographic survey. A participant information sheet and the supplementary information sheet was provided to the participant before the interview.
Ethical considerations and data analysis
Ethical approval was obtained prior to the data collection of the study. All the participants were informed that their participation is entirely voluntary, and they are free to withdraw from the study at any time for any reason. And access to the data only available for those involved in this study. Before data analysis, all interviews were transcribed. And all participant identities were ammonised. The collected qualitative data was analysed using the Thematic Analysis42. The research process as well as the Thematic Analysis is illustrated in Fig. 4.

Illustration of research process and the thematic analysis.
Informed consent
We confirm that informed consent from all subjects for publication of identifying information/images in an online open-access publication. Informed consent was obtained from all subjects. All experimental protocols were approved by the Newcastle University Ethics Committee. All methods were carried out in accordance with relevant guidelines and regulations.
Results and discussions
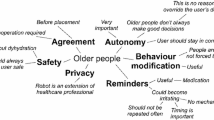
The 17 older people’s interview transcripts resulted in 101 codes in total, they were grouped into 6 key themes and 14 sub-themes. Table 1 summarises the thematic analysis.
Theme 1. Supporting active lives and social opportunities
The first theme is that a human-following robot could support active ageing, through encouraging older people to get out of the home and walk more and through facilitating older people to participate in social activities. It consists of 17 codes within three sub-themes. Example quotes were outlined in Table 2.
Many participants presented views that the robot would physically support them whilst on a walk, citing that it would alleviate pressure whilst walking through removing the need to carry (n = 6, 1 male, 5 female) and offer as a seat for respite when needed by an elderly user (n = 9, 3 male, 6 female), especially for local shopping trips (n = 4, 1 male, 3 female). Several participants also suggested that the robot would be useful for carrying other items to support them whilst on their walk (n = 4, 2 male, 2 female), such as a drink or coat. With this, some participants expressed that having a human-following robot could improve confidence whilst walking (n = 4, 2 male, 2 female) and help older people to maintain their mobility and independence as they aged (n = 3, 1 male, 2 female). These findings suggest that the robot would be multi-functional for older people, this could be used to demonstrate the commercial viability of human-following robots for the older generation, as per the suggestions of Bedaf, Gelderblom and de Witte43. Several participants stated that the robot could encourage them to go out more often (n = 5, 5 female) and some indicated that having a human-following robot would encourage them to walk rather than drive for a trip (n = 2, 2 female). This corresponds to previous findings that robot itself could be promote increased intentions to walk, as suggested by Karunarathne et al.22. These findings also indicate that human-following robots could support the active ageing, both by inspiring exercise for the maintenance of physical and mental health44 and by encouraging increased ventures outside the home.
Participants also suggested alternative uses related to carrying objects for social and recreational activities, including sports equipment such as for golf and bowls (n = 5, 2 male, 3 female), picnics (n = 4, 1 male, 3 female), and library books (n = 3, 3 female). Other suggestions related to transporting gardening tools and art supplies (n = 3, 1 male, 2 female). These findings emphasize that the human-following robot could support the social participation of an independently living older adult, thus facilitating active ageing. Likewise, this finding reiterates that the robot could be multi-functional for elderly citizens, bettering the commercial viability of human-following robots for the older people43. Additionally, a few participants posed that a human-following robot could aid them on long-distance trips and support holiday activities (n = 4, 4 female), either as a ‘robotic suitcase’ or within the airport, which indicates that future research could further explore the use case of the human-following robotic suitcase among older people. In addition, this study has found evidence to suggest that the robot may be perceived socially by older people. Older people were seen to apply anthropomorphic and zoomorphic characteristics to the robot, such as by employing gendered terms. This finding suggests that the non-anthropomorphic robot may be perceived as a socially45.
Theme 2. Impact on existing social relationships
The second theme focusses on whether a human-following robot would offer any support for the social relations between an independently living older person and their friends and family. The sub-themes and example quotes are summarised in Table 3.
In general, participants did not feel owning a robot would make a difference to how often they saw friends or family and would have no significant impact on their existing social relationships. Several participants went on to express that the only differences they could foresee was if they were taking something to someone (n = 4, 1 male, 3 female) or if someone was considering one for themselves. A couple of participants commented on others ‘visiting the robot’ but anticipated no lasting effect. As such, it is suggested that any incidence of this is attributable to the novelty effect46,47 and would have no lasting impact on interactions with family and friends. The only long-term difference noted by older people in the study was if the robot was to facilitate them taking something to someone they knew, though it is considered that this would be the use of the robot for convenience rather than the robot encouraging the social engagement. This finding is different from previous findings suggesting that robots can encourage increased familial social interaction. This could because the robots adopted in the previous studies are designed specifically with the purpose to interact with humans48,49.
Theme 3. Facilitating social interaction
The theme 3 consists of 15 codes and two sub-themes, ‘Acting as a Social Catalyst’ and ‘Unwanted Attention’, this theme shows the advantages and disadvantages of the robot attracting attention from other members of the community in a public environment, as perceived by older people. The sub-themes and example quotes are summarised in Table 4.
Many participants showed positive attitudes towards the potential attention gained through the use of the human-following robot (n = 7, 1 male, 6 female). Some participants considered that the robot would act as a talking point for conversations with others in their community, perhaps even fostering new social relationships. Other participants provided a more impartial stance towards interactions with members of the public, citing that they would not mind others asking or that it would not bother them (n = 5, 2 male, 3 female). These findings are in accordance with Hudson et al.49, who found that older people formed new friendships through taking their robotic pet to public spaces subsequent to the social interactions prompted. This finding is also comparable to those presented by studies on dog walking50,51. Therefore, this implies that a human-following robot could stimulate new human social relationships for an elderly user with others in the community and support active and healthy ageing15. However, further research is needed to validate the potential of the human-following robot on facilitating new social relationships for older people using naturalistic research methods.
Some participants had reservations about the prospect of the robot gaining the attention of others if used in a public environment. Particularly, a few shared that they would be concerned about how they would be perceived by others when using the robot (n = 5, 2 male, 3 female). With this, several participants voiced that the robot could make them feel more vulnerable (n = 4, 1 male, 3 female) and a further participant disclosed that he was concerned other people would interact with the robot undesirably (n = 1, male). A few participants also shared that they would become tired of members of the public asking about the robot after a while (n = 3, 2 males, 1 female). Therefore, it is important for further research to explore any potential measures to address these concerns, for example, future iterations of the robot could implement a security system which could allow the end-users to reach out to a remote operator if needed52. Further, the results suggest that some older people would feel self-conscious using the robot in a public environment. It is important for future research to adopt quantitative methodology to further examine the impact of feeling of self-consciousness on the trust, acceptance, and intention to use the human-following robot among older people.
Theme 4. Perceived benefits for others in the communities
The Fourth theme consists of 12 codes and 3 sub-themes. Older people of this study could see the potential benefits of the human-following robot for others in the community, or themselves if their circumstances were to change in the future. The sub-themes and example quotes are summarised in Table 5.
This study found that many older people who live independently do not feel they need a human-following robot at this stage, as they perceive themselves to be in good health and relatively mobile, with no issues carrying items. Some participants that felt they did not need the robot at present, but many revealed that it could be more useful if their circumstances changed in the future (n = 12, 3 male, 9 female). Additionally, a few of the participants who specified that the robot would not be of use to them now, for instance given that they lived in a rural environment, supposed that the robot could helpful if their living situation changed, perhaps by relocating. Typically, this was reasoned with if their health declined to the extent that they would need additional support (n = 7, 2 male, 5 female) and coupled with driving cessation (n = 6, 3 male, 3 female). This finding could be interpreted as that the apparent usefulness of a robotic technology is a key determinant in whether an older person will accept a robot53. This builds on existing evidence of the heterogeneity of the elderly population31,32, agreeing with the argument that older people have a diverse range of needs in relation to the support required from assistive technologies and robots6,54. This creates a need for future research to identify the potential socio-demographic factors that affect older people’s acceptance, trust and adoption of the human-following robots.
Similarly, many who felt that the robot was not suited to their situation indicated that they could see it being used by others in distinct circumstances from their own, with most participants suggesting other user-types that the human-following robot could support (n = 15, 6 male, 9 female). Typically, these were other elderly people with acuter mobility needs (n = 8, 3 male, 5 female) and those with physical impairments or disease (n = 5, 4 female, 1 male), with participants repeatedly offering friends and relatives who they thought the robot could benefit. A few participants also suggested uses for the robot by non-elderly people (n = 5, 3 male, 2 female). With the robot offering physical support, these suggestions were expected given the inextricable links between physical health, mobility and wellbeing55, and their importance in relation to independence and quality of life. This finding indicates that there is a case for the usage of human-following robots within parts of the independently living older population but reiterates that the design of robot should consider the needs and requirements of the different user groups.
Moreover, some participants presented ideas for using the robot in settings different to the use-case presented in the interview (n = 4, 2 male, 2 female), including care homes, assisted living facilities, hospitals and rehabilitation centres. This finding was anticipated given the increased support required by older individuals in such settings and is consistent with robotic applications investigated in prior literature56,57,58. The findings indicated that the robot has the potential in addressing the care worker shortage presented by the ageing population59. These findings highlight the need for further research to explore the potential of utilizing human-following robots in hospital settings. And it would be important to evaluate the robot from the care worker perspectives.
Theme 5. Identified issues of the human-following robots
Theme 5 comprises of 25 codes and two sub-themes. The sub-theme ‘Identified limitations’ shows the views of participants that felt that the present design of the robot has some room for improvement to meet all their needs and expectations, with participants expressed some concern over the practical limitations currently associated with the robot. The sub-themes and example quotes are summarised in Table 6.
Markedly, the inability of the robot to traverse kerbs or steps was a concern for all participants, with over half of participants feeling that they would need to plan and alter their route to the shops to accommodate the robot. Linking to this, most participants expressed anxieties over the weight of the robot and felt that they would have struggled to lift the robot up a kerb or step if required (n = 12, 4 male, 8 female). This concern was also associated to lifting the robot into the car or onto public transport (n = 7, 1 male, 6 female). Similarly, the limited types of terrain that the robot can negotiate was perceived as an issue by participants (n = 10, 4 male, 6 female), particularly inability to handle grass and cobbles. The majority of participants compared the robot to alternatives (n = 13, 6 male, 7 female), either existing physical supports for aiding a shopping trip or other perceived options. Participants weighed the robot against a conventional shopping trolley bag most frequently (n = 7, 5 female, 2 male), with cost, size and manoeuvrability of the human-following robot often expressed as falling short of that presented by a shopping trolley bag. Participants also compared the robot against other mobility aids, such as wheelchairs and Zimmer frames. Further, options that would eliminate the need for an older person to walk and carry to the shop were also referred to by participants, including the car (n = 3, 2 male, 1 female) and online shopping (n = 3, 1 male, 2 female).
These findings could be possibly explained as that the robot has not been specifically designed for older people, and the potential use-case comes as an afterthought to technological development60. Since the current study did not involve testing older people interacting with the robot in real-world scenarios, it is crucial for future research to quantify the impact of technical limitations on older people's acceptance, trust, and comfort in using human-following robots and explore how these technical limitations could be addressed in the future iterations of the robot.
Theme 6. Requirements for improvements of the human-following robot
The sixth theme (Table 7) captures 28 codes and three sub-themes. Most participants expressed that they could broadly see potential benefits of the robot for older people (n = 13, 5 male, 8 female), typically praising the cargo carrying functionality and a few comparing it positively to alternative options (n = 5, 1 male, 4 female). However, many participants also specified that the robot needed improvements and added features, and make it suitable to use (n = 5, 2 male 3 female) or to increase the benefit an older user would obtain from the robot (n = 7, 3 male, 4 female). The most frequently cited changes were to evolve the robot to handle kerbs and steps (n = 7, 3 male, 4 female) and further types of terrain (n = 4, 1 male, 3 female), and the addition of a handle to allow for manual manoeuvrability (n = 6, 1 male, 5 female). Other additional robot features suggested by participants were an alarm system for personal and robot security (n = 4, 2 male, 2 female), an audio or visual system to warn others of the robot (n = 4, 1 male, 3 female), a ‘lead’ type attachment to the user, a refrigerated hold, a light, a fingerprint or facial recognition security system, and an identification card with the users contact details on for in case of emergency. Several participants also expressed a desire for a personalised robot (n = 5, 2 male, 3 female), particular of the colour. Additionally, a couple of participants offered suggestions associated to implementation beyond the robot design, including a ‘shop mobility’ type service where older people could pick up a robot from a suitable location whilst shopping as needed rather than owning one individually (n = 2, 2 female).
A number of participants showed interest towards the robot and its technology (n = 6, 5 male, 1 female), with a few citing the robot as a ‘fun’ idea (n = 4, 2 male, 2 female), thus linking to the above sub-theme. Moreover, many participants commented that the human-following robot was a ‘novelty’ at present (n = 9, 7 female, 9 male). With this, a couple of participants suggested that a trial period would be useful (n = 2, 1 male, 1 female), given that older people would not know if the robot would work for them until they had tried it. Several participants also reported that they already owned or had considered purchasing other assistance robots and a further few compared the robot to technologies they were already accustomed with (n = 6, 3 male, 3 female).
In addition, many participants identified potential problems with using the robot that they felt would need to be addressed. Most frequently, the human-following robot was considered a hazard to other pedestrians (n = 6, 2 male, 4 female) and to vehicles, if the robot was to enter the road (n = 3, 1 male, 2 female). Consequently, a couple of participants speculated that insurance for the robot might be required (n = 2, 1 male, 1 female). Further issues identified related to reliance (n = 2), battery life and charging (n = 6), use in different light and weather conditions (n = 3) and changes to shopping habits (n = 7).
Conclusion
Promoting healthy aging is not only important for the well-being of older adults but also potentially providing significant benefits to society as a whole6. The rapid development of human assistance and following robot has the potential to benefit older people and facilitate their health and wellbeing. However, to date, there has been limited research on the needs and requirements of older people regarding human-following robot. It remains unclear how human-following robot could be designed age-friendly and to provide tailored support to older people. To fill the research gaps, this research aimed to investigate the perceptions, attitudes, needs and requirements of older people concerning the human-following robot, to create new knowledge and novel insights that can support the design and development of age-friendly human-following robot. The key findings are as follows:
-
Older adults perceived the potential of the human following robot to support healthy ageing.
-
Older adults considered the robot's ability to carry items and function as a seat to be useful for supporting their independence as they age.
-
Using the human-following robot was deemed by older people to have limited impact on the frequency of their interactions with friends and family.
-
Older adults believed that human-following robots hold the potential for supporting such human–human social interactions of an elderly person, through encouraging increased walking trips and acting as a social catalyst in a public environment.
-
The older people have voiced worries about possible negative interactions between the robot and others, and it may be worthwhile to consider future iterations of the robot that address these concerns. For example, implementing a security system that connects to a remote operator.
-
Older adults presented that they did not yet need the support of a human-following robot given that they could still carry belongings or drive, but it could be useful for maintaining their mobility and independence if their health was to decline or their circumstances change in future, particularly if they could no longer drive.
-
Older adults believed that the human-following robot could benefits others, including other older adults with acuter mobility needs, those with physical impairments or disease.
-
The study has also highlighted older people’s requirements regarding where the human-following robot could be improved, such as enhancing its ability to navigate kerbs, steps, and different types of terrain. Other potential enhancements include adding a handle, an alarm system to ensure personal and robot security, an audio or visual system to alert others to the robot's presence, a 'lead' attachment to help guide the user, a refrigerated compartment, a light, and a security system that uses fingerprint or facial recognition technology. It may also be useful to incorporate an identification card with the user's contact information in case of emergencies, as well as exploring the possibility of a personalized robot.
-
Practical limitations and cost of the robot are barriers perceived by older people to adopt the human-following robot at present.
In conclusion, this study has demonstrated that human-following robots have the potential to facilitate healthy aging and support better quality of life for older adults. However, further improvements to the design of these robots are necessary to ensure that they are accepted and utilized by older adults, and to fully realize the benefits that they offer. The current study emphasizes the importance of considering the needs and requirements of older people in the design and development of age-friendly human following robots, ensuring their acceptance and usability. The findings of this study highlighted that robot developers and innovators should consider the development of improved capabilities for handling kerbs, steps and more diverse terrain should be pursued for the robot to be a viable option for most older people. Another implication of this study is that future research as well as robot developers could future explore the additional features and design modifications required by older people in this study, including an alarm security system and features to alert other road users about the robot’s presence. Considering that cost was identified as a potential barrier to the adoption of human-following robots by older people in this study, it is recommended for future research to assess their commercial viability. It is suggested that other business models, such as the "shop mobility" model and inclusion hospital release packages that were proposed by older people in this study, could be pursued to increase their accessibility and affordability. Given that older people in this study felt a human-following robot would be a valuable option if they cease driving, it is therefore important for future research to investigate the potential impact of using human-following robot on mitigating the negative impact of driving cessation on older people’s independence and quality of life37. Such research would also potentially provide evidence-based knowledge on informing the policymakers about when it would be best to introduce an older citizen to a human-following robot. Additionally, considering that there are other promising future mobility applications and technologies that could improve the quality of life for older individuals, such as vehicle automation7,10,14,37, future research should explore how the human-following robots could work collaboratively with connected and automated vehicles to provide older people with tailored, seamless and convenient mobility services. The findings of this study could inform policymakers, robot manufacturers, and service providers about the key factors that affect the successful implementation of the robot. These factors include insurance, policies, regulations, trial periods, and training with the robot. An additional suggestion for future research is to explore whether self-consciousness is a potential barrier to the acceptance of assistive and robotic technologies among older individuals.
Although this study makes a novel contribution to understanding the acceptance of human-following robots by older people, limitations still exist. Firstly, the present study enabled older people to be familiar with the human-following robot by watching a video. Although the video provided sufficient details to allow the participants to understand the functions and use cases of the human-following robot in outdoor settings, there could be still impression gaps between watching a video of the robot and interacting with it physically. Even if the robot makes a positive visual impression, users perceptions may change after actually using it in-person. Therefore, future research is necessary to explore the gaps in older people’s impression, requirements and perception towards the human-following robot between watching a video of the robot and using it physically. Moreover, to validate the findings of the present study and gain new insights into how the robot could support and benefit healthy aging in the long term, it is recommended that future research should investigate the human-following robot using naturalistic methodology that involves observing and monitoring independently living older individuals interacting with the robot in real-world settings over an extended period.
The current study attempts to identify older people’s needs and requirements of the human-following robot using a qualitative methodology, future research has been planned to use a quantitative methodology to explore older people’s performance and perception when interacting with a human-following robot in person. The current study focused on designing age-friendly human-following robot from the user perspective. Future research could investigate the robot from control algorithm point of view. In addition, the human-following robot adopted in this study is non-anthropomorphic, so future research should examine older people’s needs and requirements for anthropomorphic robots, for example, the provided robots had arms or faces. Furthermore, future research should investigate how other demographic factors, such as gender affect older people’s requirements towards the human-following robots61. Finally, population aging is acknowledged as a global issue. As all older people participated in this study were based in the UK, it is important for future research to investigate how the perspectives, needs and requirements of older individuals towards human-following robots may vary in other regions around the world.
Data availability
The datasets generated during and/or analysed during the current study are available from the corresponding author on reasonable request.
References
United Nations Department of Economic and Social Affairs, P. D. U. D. World Population Ageing 2020 Highlights: Living arrangements of older persons (ST/ESA/SER.A/451). (United Nations, 2020).
Lewis, A. Housing an ageing population: a reading list (House of Commons Library briefing paper Number 09239). (2021).
Metz, D. H. Mobility of older people and their quality of life. Transp. Policy 7, 149–152 (2000).
Alsnih, R. & Hensher, D. A. The mobility and accessibility expectations of seniors in an aging population. Transp. Res. Part A Policy Pract. 37, 903–916 (2003).
Webber, S. C., Porter, M. M. & Menec, V. H. Mobility in older adults: A comprehensive framework. Gerontologist 50, 443–450 (2010).
Li, S. et al. Should older people be considered a homogeneous group when interacting with level 3 automated vehicles?. Transp. Res. F Traffic Psychol. Behav. 78, 446–465 (2021).
Li, S., Blythe, P., Guo, W. & Namdeo, A. Investigation of older drivers’ requirements of the human–machine interaction in highly automated vehicles. Transp. Res. F Traffic Psychol. Behav. 62, 546–563 (2019).
Roeder, L., Boonstra, T. W. & Kerr, G. K. Corticomuscular control of walking in older people and people with Parkinson’s disease. Sci. Rep. 10, 1–18 (2020).
Ikegami, S. et al. Physical performance reflects cognitive function, fall risk, and quality of life in community-dwelling older people. Sci. Rep. 9, 1–7 (2019).
Li, S., Blythe, P., Guo, W. & Namdeo, A. Investigating the effects of age and disengagement in driving on driver’s takeover control performance in highly automated vehicles. Transp. Plan. Technol. 42, 470–497 (2019).
Yang, L., Ao, Y., Ke, J., Lu, Y. & Liang, Y. To walk or not to walk? Examining non-linear effects of streetscape greenery on walking propensity of older adults. J. Transp. Geogr. 94, 103099 (2021).
Tsunoda, K. et al. Acceptable walking and cycling distances and functional disability and mortality in older Japanese adults: An 8-year follow-up study. Health Place 79, 102952 (2023).
Deutsch, I., Erel, H., Paz, M., Hoffman, G. & Zuckerman, O. Home robotic devices for older adults: Opportunities and concerns. Comput. Hum. Behav. 98, 122–133 (2019).
Li, S. et al. Evaluation of the effects of age-friendly human-machine interfaces on the driver’s takeover performance in highly automated vehicles. Transp. Res. F Traffic Psychol. Behav. 67, 78–100 (2019).
Poscia, A. et al. Interventions targeting loneliness and social isolation among the older people: An update systematic review. Exp. Gerontol. 102, 133–144 (2018).
NHS. Loneliness in older people, https://www.nhs.uk/mental-health/feelings-symptoms-behaviours/feelings-and-symptoms/loneliness-in-older-people/ (2022).
Pearce, A. J. et al. Robotics to enable older adults to remain living at home. J. Aging Res. 2012, 538169 (2012).
Shishehgar, M., Kerr, D. & Blake, J. A systematic review of research into how robotic technology can help older people. Smart Health 7, 1–18 (2018).
Johnson, M. J. et al. Task and design requirements for an affordable mobile service robot for elder care in an all-inclusive care for elders assisted-living setting. Int. J. Soc. Robot. 12, 989–1008 (2020).
Mucchiani, C. et al. In 2018 27th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), 121–128 (IEEE, 2018).
Mucchiani, C. et al. In 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 840–847 (IEEE, 2017).
Karunarathne, D., Morales, Y., Nomura, T., Kanda, T. & Ishiguro, H. Will older adults accept a humanoid robot as a walking partner?. Int. J. Soc. Robot. 11, 343–358 (2019).
Nomura, T., Kanda, T., Yamada, S. & Suzuki, T. The effects of assistive walking robots for health care support on older persons: A preliminary field experiment in an elder care facility. Intell. Serv. Robot. 14, 25–32 (2021).
Chen, K., Lou, V. W. Q., Tan, K. C. K., Wai, M. Y. & Chan, L. L. Effects of a humanoid companion robot on dementia symptoms and caregiver distress for residents in long-term care. J. Am. Med. Dir. Assoc. 21, 1724–1728.e3 (2020).
Robinson, H., MacDonald, B. & Broadbent, E. Physiological effects of a companion robot on blood pressure of older people in residential care facility: A pilot study. Australas. J. Ageing 34, 27–32 (2015).
Tseng, K. C., Hsu, C. L. & Chuang, Y. H. Designing an intelligent health monitoring system and exploring user acceptance for the elderly. J. Med. Syst. 37, 9967 (2013).
Broadbent, E. et al. Attitudes towards health-care robots in a retirement village. Australas. J. Ageing 31, 115–120 (2012).
Sumiya, T., Matsubara, Y., Nakano, M. & Sugaya, M. A mobile robot for fall detection for elderly-care. Procedia Comput. Sci. 60, 870–880 (2015).
Valenti, G., Bonomi, A. G. & Westerterp, K. R. Walking as a contributor to physical activity in healthy older adults: 2 week longitudinal study using accelerometry and the doubly labeled water method. JMIR Mhealth Uhealth 4, e5445 (2016).
Chebotareva, E., Magid, E., Carballo, A. & Hsia, K. H. In 13th International Conference on Developments in eSystems Engineering (DeSE). (IEEE).
Ferrari, F. et al. Human-robot interaction analysis for a smart walker for elderly: The ACANTO interactive guidance system. Int. J. Soc. Robot. 12, 479–492. https://doi.org/10.1007/s12369-019-00572-5 (2020).
Fakoya, O. A., McCorry, N. K. & Donnelly, M. How do befriending interventions alleviate loneliness and social isolation among older people? A realist evaluation study. PLoS ONE 16, e0256900 (2021).
Sætra, H. S. The foundations of a policy for the use of social robots in care. Technol. Soc. 63, 101383 (2020).
WHO. Definition of an older or elderly person, http://www.who.int/healthinfo/survey/ageingdefnolder/en/ (2016).
WHO. Ageing and health, https://www.who.int/news-room/fact-sheets/detail/ageing-and-health (2018).
ONS. Living longer: how our population is changing and why it matters, https://www.ons.gov.uk/peoplepopulationandcommunity/birthsdeathsandmarriages/ageing/articles/livinglongerhowourpopulationischangingandwhyitmatters/2018-08-13 (2018).
Li, S., Blythe, P., Guo, W. & Namdeo, A. Investigation of older driver’s takeover performance in highly automated vehicles in adverse weather conditions. IET Intell. Transp. Syst. 12, 1157–1165 (2018).
Guest, G., Bunce, A. & Johnson, L. How many interviews are enough? An experiment with data saturation and variability. Field Methods 18, 59–82 (2006).
Polit, D. F. & Beck, C. T. Generalization in quantitative and qualitative research: Myths and strategies. Int. J. Nurs. Stud. 47(11), 1451–1458 (2010).
Dilshad, R. M. & Latif, M. I. Focus group interview as a tool for qualitative research: An analysis. Pak. J. Soc. Sci. 33, 191–198 (2013).
DiCicco-Bloom, B. & Crabtree, B. F. The qualitative research interview. Med. Educ. 40(4), 314–321 (2006).
Braun, V. & Clarke, V. Thematic Analysis: A Practical Guide to Understanding and Doing 1st edn. (SAGE Publications, 2021).
Bedaf, S., Gelderblom, G. J. & de Witte, L. Overview and categorization of robots supporting independent living of elderly people: What activities do they support and how far have they developed. Assist. Technol. 27, 88–100 (2015).
Bandini, S. & Gasparini, F. Social and active inclusion of the elderly in the city through affective walkability. Rev. Socionetw. Strateg. 15, 557–573 (2021).
Reeves, B. & Nass, C. I. The Media Equation: How People Treat Computers, Television, And New Media Like Real People and Places (Cambridge University Press, 1996).
Sung, J., Christensen, H. I. & Grinter, R. E. In The 4th ACM/IEEE International Conference On Human Robot Interaction. 45–52 (Association for Computing Machinery (HRI ’09)).
Leite, I., Martinho, C. & Paiva, A. Social robots for long-term interaction: A survey. Int. J. Soc. Robot. 5, 291–308 (2013).
Hung, L. et al. The benefits of and barriers to using a social robot PARO in care settings: A scoping review. BMC Geriatr. 19, 1–10 (2019).
Hudson, J. et al. Robotic pet use among community-dwelling older adults. J. Gerontol. Ser. B 75, 2018–2028 (2020).
McNicholas, J. & Collis, G. M. Dogs as catalysts for social interactions: Robustness of the effect. Br. J. Psychol. 91, 61–70 (2000).
Wood, L. et al. The pet factor—Companion animals as a conduit for getting to know people, friendship formation and social support. PLoS ONE 10, e0122085 (2015).
Li, S., Zhang, Y., Edwards, S. & Blythe, P. T. Exploration into the needs and requirements of the remote driver when teleoperating the 5G-enabled level 4 automated vehicle in the real world—a case study of 5G connected and automated logistics. Sensors 23, 820 (2023).
Heerink, M., Kröse, B., Evers, V. & Wielinga, B. Assessing acceptance of assistive social agent technology by older adults: The almere model. Int. J. Soc. Robot. 2, 361–375 (2010).
Zandieh, R. & Acheampong, R. A. Mobility and healthy ageing in the city: Exploring opportunities and challenges of autonomous vehicles for older adults’ outdoor mobility’. Cities 112, 103135 (2021).
Nordbakke, S. & Schwanen, T. Transport, unmet activity needs and wellbeing in later life: Exploring the links. Transportation 42, 1129–1151 (2015).
Ostrowski, A. K., Dipaola, D., Partridge, E., Park, H. W. & Breazeal, C. Older adults living with social robots: Promoting social connectedness in long-term communities. IEEE Robot. Autom. Mag. 26, 59–70 (2019).
Sinnema, L. & Alimardani, M. In Social Robotics (eds Salichs, M. A. et al.) 24–33 (Springer International Publishing, 2019).
Chen, S.-C., Moyle, W., Jones, C. & Petsky, H. A social robot intervention on depression, loneliness, and quality of life for Taiwanese older adults in long-term care. Int. Psychogeriatr. 32, 981–991 (2020).
Niemelä, M. & Melkas, H. In Human-Centered Digitalization and Services. (eds Toivonen, M. & Saari, E.) 177–197 (Springer Singapore, 2019).
Zheng, N., Cui, F. & Hui, Y. Door recognition principles in GITA’s machine vision. J. Phys. Conf. Ser. 1229, 1–10 (2019).
Li, S. et al. Analysing the effect of gender on the human–machine interaction in level 3 automated vehicles. Sci. Rep. 12, 1–15 (2022).
Acknowledgements
We would like to thank all the participants of this study. We acknowledge the on-going support of the UK's Engineering and Physical Sciences Research Council (EPSRC) throughout the research through the following funding awards: LC Transform (EP/N010612/1); Helping Older Drivers continue driving safer for longer (EP/K037579/1); the Centre for Energy Systems Integration (EP/P001173/1); and the UK National Innovation Centre for Ageing (NICA).
Author information
Authors and Affiliations
Contributions
Conceptualisation, S.L., P.B., K.M., Y.Z., S.E., N.P., L.C., A.N.; Methodology, S.L., K.M., P.B., S.E., N.P., L.C., A.N.; Software, K.M., S.L. P.B., Y.Z.; Validation, K.M., S.L., P.B., Y.Z.; Formal analysis, K.M., S.L.; Investigation, K.M., S.L.,P.B.; Resources, S.L., P.B., Y.Z., S.E., N.P., L.C., A.N.; Data curation, K.M., S.L.,P.B.; Writing—original draft preparation, S.L., K.M., P.B.,Y.Z.; Writing—review and editing, S.L., K.M., P.B., Y.Z., S.E., N.P., L.C.,Y.J., F.Z., A.N.; Visualisation, S.L., K.M., Y.Z.; Supervision, S.L., P.B.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher's note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Li, S., Milligan, K., Blythe, P. et al. Exploring the role of human-following robots in supporting the mobility and wellbeing of older people. Sci Rep 13, 6512 (2023). https://doi.org/10.1038/s41598-023-33837-1
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41598-023-33837-1
- Springer Nature Limited