
Abstract
To characterize cell types, cellular functions and intracellular processes, an understanding of the differences between individual cells is required. Although microscopy approaches have made tremendous progress in imaging cells in different contexts, the analysis of these imaging data sets is a long-standing, unsolved problem. The few robust cell segmentation approaches that exist often rely on multiple cellular markers and complex time-consuming image analysis. Recently developed deep learning approaches can address some of these challenges, but they require tremendous amounts of data and well-curated reference data sets for algorithm training. We propose an alternative experimental and computational approach, called CellDissect, in which we first optimize specimen preparation and data acquisition prior to image processing to generate high quality images that are easier to analyze computationally. By focusing on fixed suspension and dissociated adherent cells, CellDissect relies only on widefield images to identify cell boundaries and nuclear staining to automatically segment cells in two dimensions and nuclei in three dimensions. This segmentation can be performed on a desktop computer or a computing cluster for higher throughput. We compare and evaluate the accuracy of different nuclear segmentation approaches against manual expert cell segmentation for different cell lines acquired with different imaging modalities.
Similar content being viewed by others

Introduction
Individual cells respond to their environment, make cell fate decisions, or cause diseases when mutated. Understanding biological processes in detail at the molecular and cellular level in healthy and diseased tissue ultimately requires that cells be analyzed at single cell resolution. Over the last few decades, microscopy techniques to image single cells have improved significantly, resulting in a wealth of imaging data sets1,2,3,4. However, analyzing these data sets quantitatively in a high-throughput manner is still an immensely difficult and often unsolved task5. The lack of quantitative analysis algorithms is the ultimate bottleneck in extracting more information from microscopy images, thus hindering mechanistic understanding of single cell behavior and its relevance to physiology and disease2,6.
To address these limitations, efforts have been undertaken to develop image processing platforms to analyze microscopy images and segment individual cells2,4,7. These approaches require high-contrast fluorescent cellular markers to distinguish between the inside of the cell and the cell boundary. In many cases, cells are grown under low density adherent cell culture conditions, resulting in few cells that have very low contrast when imaged in widefield8,9. Furthermore, because of low-contrast images, cell segmentation in mammalian cells requires fluorescent markers to stain the cell boundary homogenously10. However, in live as well as fixed cells, variability in protein expression levels, cell morphology or cell preparation for microscopy can cause heterogenous staining for an individual marker, making single-color stains insufficient for achieving homogenous staining and requiring human-assisted cell segmentation11.
Cell staining approaches utilizing multiple cell segmentation markers labeled with different fluorophores have been used to address this problem on the experimental side4,12,13. While the effects of heterogeneous staining can be minimized by this approach, the use of additional cell segmentation markers in different fluorescent channels reduces the number of channels available to address biological questions12,13. Additionally, this methodology is time-consuming due to its requirement of significant optimization and long periods of imaging. Regardless of the staining strategy, most adherent cells are grown at low density to enable cell segmentation, resulting in few cells per field of view and limited single-cell statistics. Cells in suspension are easier to segment, but concentrating cells to ensure high density during imaging to increase cell statistics is challenging.
Computationally, attempts have been made to address image analysis challenges using machine learning and deep learning approaches3,9,14. Such approaches rely on large and well-curated data sets to train a complex model describing features in images that identify single cells. Studies report impressive results using these approaches in cell segmentation, but it is currently an open question how transferable models generated by these approaches are to new and much smaller data sets14. One recent study has reported success in utilizing relatively few annotated datasets to adapt deep learning networks3. Another study suggested much more data is required for cell segmentation using the same deep learning approach4. Therefore, it is unclear how much annotated data will be needed to adapt deep learning networks. Ideally, avoiding the need for labor-intensive annotation entirely would be preferable. Implementing machine learning and deep learning approaches to generate new models also requires substantial expertise, making such methods extremely difficult for less-experienced users to adopt15.
We propose an alternative approach, called CellDissect, that overcomes these limitations both experimentally and computationally to improve image segmentation. The approach involves first optimizing sample preparation. By utilizing single-cell dissociation and cell fixation approaches alongside repurposed commercial “well-in-a-well” technology (IBIDI, µ-Slide Angiogenesis), CellDissect’s experimental workflow results in high-contrast widefield images with high cell density (Fig. 1A). This is paired with nuclear staining, which allows for segmentation of the nucleus and assists cell boundary segmentation without the use of multiple markers or fluorescent channels. In addition, we demonstrate that live yeast cells can be also segmented with CellDissect (Fig. S1). CellDissect’s nuclear and cellular segmentation algorithms then process these images with minimal user input through MATLAB or a graphical user interface (GUI) to generate highly accurate nuclear segmentation in 3D and cellular segmentation in 2D without the need for computational expertise or large, curated datasets.

Sample preparation and computational requirements for automated cell segmentation. (A) Overview of experimental and computational workflow. Predefined minimum and maximum nuclear and cytoplasmic area for different cell types are selected and only need to be modified once for a specific cell type and imaging condition. (B) Cells can be adherent, in suspension, or exist as cell aggregates before trypsin treatment. After trypsinization and dissociation, single cells are imaged at high density on a microscope regardless if they were previously adherent or in suspension. Scalebar at 10x is 17.53 µm and at 100x 5.07 µm.
Results
Since we observed low-contrast cell boundaries in adherent cells or cell aggregates, while boundaries of single-cell suspensions tended to be more distinct, we hypothesized that suspension and single-cell dissociation could improve data quality for cells not already in single-cell suspensions. This idea became the first step in our CellDissect approach, in which adherent cells (Fig. 1B, top) and cell aggregates (Fig. 1B, bottom) are trypsinized to dissociate into single-cell suspensions. Cells are subsequently fixed with formaldehyde and permeabilized with ethanol, the DNA is stained with DAPI, and the cells are mounted on commercial microwell plates to ensure high cell density for imaging (Fig. 1B, right). The CellDissect approach ensures that single fixed cells are in suspension and form round spheres that generate a strong refraction pattern from cell membranes upon widefield illumination (Figs. 1B and 3B). This characteristic is critical to identify the cellular boundary with CellDissect if cells are not naturally in a single-cell suspension, and it eliminates the need for a fluorescent cell boundary marker. Another advantage is that a standard widefield fluorescent microscope available in many cell biology facilities can be used without modifications. Our CellDissect approach is suitable if the scientific question does not require to know the exact cell shape in 3D or the cell-to-cell context in a cell culture plate or tissue. After image acquisition, the computational workflow in CellDissect (Fig. 1A) consists of defining minimum and maximum nucleus and cell sizes for a specific cell type that can be determined by using a GUI. This step needs to be performed once for a specific cell type and microscope setup. After these parameters have been determined in a small number of cells, correct nuclear segmentation in 3D (Fig. 2) is followed by cell boundary segmentation in 2D (Fig. 3).

Automated nuclear segmentation of 3D image stacks. (A) Maximum projected cell nuclei with variable DAPI intensities (top). Distribution of integrated DAPI intensities within an image (bottom). (B) Workflow of the nuclear segmentation code after providing cell type-specific definitions of minimal and maximum nuclear area. (C) Increasing threshold result in an increase and then decrease in connected regions (top row). Binary images from the top are analyzed for connected regions within a cell type specific size range (bottom row). (D) Threshold binary images in the top row are added resulting in a pseudo image of large and small connected regions (Added Images). (E) Separation of connected objects before and after individual investigation of nuclei to maximize objects fitting size parameters. (F) Low and High estimate of nuclear area after watershed algorithm labels individual nuclei resulting in segmented nuclei. (G) Boundary of the nucleus is determined individually by first radially identifying the fluorescent intensity of pixels in and around the nucleus (top, green circle). For each cell a threshold in the maximum cumulative fluorescent intensity (blue line) was determined using the High estimate of nuclear area to robustly identify the nuclear boundary in 3D across all cell types and imaging conditions (bottom). (H) Nuclear segmentation in 3D from the bottom to top presented as series of images. (I) Nuclear segmentation accuracy (F1-score) quantification of 3D nuclear segmentation comparing fully automated adaptive threshold algorithm CellDissect (blue), maximum nuclei threshold algorithm (orange) and manual thresholding (yellow) in comparison to manual segmentation in four different cell lines and two different imaging magnifications. Mean and standard deviations are computed from quantifying 3–4 images by three independent human experts (left) or 3 replicas by one human expert (right).

Automated cell boundary segmentation. (A) Workflow of the automated cell boundary segmentation. (B–G) Images showing individual processing steps: (B) Maximum projected widefield image using several images with clear cell boundaries is used to generate a (C) background image using disk smoothing. (D) After background subtraction, the maximum projected widefield image is overlaid with the segmented nuclei. (E) A watershed algorithm is applied resulting in segmented cells with cells on the image boundary removed (F). (G) Overlay of widefield (grey), DAPI (blue), nuclear (yellow) and cytoplasmic (magenta) segmented mESC. Scalebar 13.3 µm (H) Cell segmentation accuracy (F1-score) quantification of 2D cell segmentation comparing fully automated adaptive threshold algorithm CellDissect (blue), maximum nuclei threshold algorithm (orange) and manual thresholding (yellow) in comparison to manual segmentation in four different cell lines and two different imaging magnifications. Mean and standard deviations are computed from quantifying the 3–4 images by three independent human experts (left) or 3 replicas by one human expert (right).
Nuclear segmentation in three dimensions
Traditionally, cells are segmented by using a fixed intensity threshold16,17,18,19. Although this has been sufficient to segment yeast cells, mammalian cells exhibit large variation in their nuclear DNA resulting in variable DAPI intensities (Fig. 2A). If the goal is to precisely segment the nucleus, then the intensity of each individual nucleus needs to be considered. In order to ensure segmentation of cells with different DAPI intensities, in CellDissect we propose an adaptive thresholding approach (Fig. 2B). Here we generate binary images from maximum intensity projected DAPI images with increasing thresholds and filter objects based on size (Fig. 2C). This size filtering depends on the user-defined minimum and maximum nuclear size, which helps eliminate most instances of nuclei being blended together due to a low threshold (since it results in an abnormally large object) as well as noise or bright subsections of nuclei that are smaller than a complete nucleus (Fig. 2D). To separate connected nuclei, we investigate each object to determine if removing layers of the added binary image results in separate nuclei fitting the size requirements (Fig. 2E). This methodology allows one to identify the maximum number of individual nuclei in each image, and two different masks are generated during this process (Fig. 2F). The first is a mask that results from removing the greatest number of layers while retaining the greatest number of nuclei, which becomes an underestimate of the nuclear area (Fig. 2F, top). The second is a mask resulting from removing the least number of layers while still retaining the maximum number of nuclei, which results in a slight overestimate of the nuclear area for each nucleus (Fig. 2F, bottom).
After the initial identification of the maximum number of nuclei, each nucleus is thresholded individually to determine the correct nuclear boundary (Fig. 2G). The individual threshold is identified by utilizing the overestimate of nuclear area in the previous step to identify a threshold in the cumulative distribution of the DAPI signal for each nucleus independently. Although the slight overestimate of nuclear area often results in some noise being included in the initial nuclear determination, this is largely corrected by a subsequent processing step that removes all but the largest connected volume in 3D. Our CellDissect approach allows for automated and precise 3D nuclear segmentation (Fig. 2H). Finally, we compare the accuracy of three nuclear thresholding algorithms that we developed and tested, which are (1) the adaptive thresholding algorithm CellDissect (blue bar), (2) an algorithm that uses a fixed threshold that maximizes the number of segmented nuclei (orange bar) and (3) a manually chosen fixed threshold (yellow bar), to the original images using human experts (Fig. 2I). We scored false positive cells and nuclei as those that were detected computationally but not segmented correctly (>20% error). False negatives were cells or nuclei that were not identified computationally but were identified by a human expert. Applying the CellDissect approach to several cell types measured at different magnifications resulted in high accuracy (F1-score) in nuclear segmentation when compared to the ground truth of cell segmentation from several researchers (Fig. 2I). The F1-score is defined as the harmonic average of precision and sensitivity20. Precision shows how many of the computationally segmented objects are segmented correctly. Sensitivity shows how many of the total objects are segmented correctly. Fixed thresholds yielded good results in determining the number of S. cerevisae (S.c.) and S. pombe (S.p.) yeast nuclei per image. However, fixed thresholds performed extremely poor in identifying the correct number of nuclei in mammalian cells. We overcame this problem with our adaptive thresholding approach CellDissect (Fig. 2C–E). In addition, defining an individual DAPI intensity threshold for each cell was essential to correctly segment the nuclear boundary in 3D (Fig. 2G,H). In summary, we have demonstrated with CellDissect, for a range of different cell types and imaging modalities, that using multiple thresholds increases the number of nuclei identified and is essential to correctly identifying the number of mammalian nuclei with F1-scores of up to 0.98 which is significantly better than previously reported by CellProfiler4 (Fig. 2I). In addition, individual thresholding of nuclei is essential to correctly identifying the nuclear boundary and ensuring 3D nuclear segmentation for all the different cell types.
Cell boundary segmentation
To segment individual cells in 2D, our CellDissect pipeline consists of maximum projection of widefield images, background correction, composite image generation, watershed cell segmentation and object removal based on size resulting in segmented single cells (Fig. 3A). First, we project several maximum contrast widefield images by maximum intensity to generate the cell outline as a white ring (Fig. 3B). Next, we generate a background image from the cell widefield image through disk smoothing (Fig. 3C). We then subtract this background image to enhance the contrast in the widefield image. Next, we generate a composite image of the processed widefield image and the nuclear mask (Fig. 3D). This composite image is the input for a watershed algorithm (Fig. 3E). Elements that are too big, too small or on the image boundary are removed (Fig. 3F). The overlay of the processed widefield image, the DAPI image, and the segmented nuclear and cytoplasmic boundary is shown in Fig. 3G.
To demonstrate the robustness and throughput of our approach, we applied our CellDissect pipeline to S. cerevisae (S.c.), S. pombe (S.p.) yeast cells, mouse embryonic stem cells (mESCs) and human Jurkat cells with images taken at 100x magnification (Fig. 4A). We also applied our CellDissect approach to mESCs and Jurkat cells imaged at 20x magnification. These results demonstrate qualitatively how our optimized experimental cell preparation protocol results in high quality and high cell density images at different cell magnifications, which is the basis for imaging large numbers of single cells. In addition, we quantified accuracy (F1-score) of our CellDissect approach in comparison to the ground truth that was independently generated from three human experts for one biological replica or three biological replicas assessed by one expert (Fig. 3H). These results show quantitatively that Cell Dissect outperforms the other approaches regardless of cell type and magnification. Finally, we outline how our CellDissect methode can be utilized on a single desktop computer or on a computing cluster that processes images in parallel to increase throughput (Fig. 4B).

Application, implementation and performance of cell segmentation for different cell types from different organism imaged at low and high resolution. (A) Overlay of widefield (grey), DAPI (blue), nuclear (yellow) and cytoplasmic (magenta) segmented S. cerevisiae, S. pombe, mESC and Jurkat cells imaged at 100x and mESC and Jurkat cells imaged at 20x. (B) Image processing can be performed on a desktop computer or on a computing cluster for each individual image stack resulting in significant throughput. Segmenting one image takes on overage 30 minutes. For an average time course experiment consisting of 64 images of yeast cells, parallelization speeds up the image processing 64 fold.
Discussion
We present CellDissect, a combined experimental and computational workflow to identify individual cells and segment their nuclei in 3D at high accuracy, at high cell density and with high throughput. In cases where cells are not already in a single-cell suspension and knowledge about cell morphology, nearest neighbor interaction or single cell time trajectory is not required, dissociating cells into single-cell suspensions greatly improves data quality, uniformity and throughput (Fig. 1). This is because cells form spheres in suspension, generating a strong diffraction pattern and allowing these cells to be imaged in widefield with high contrast cell boundaries (Fig. 1B). Generating cell suspensions circumvents the problem of low contrast cell boundaries in adherent cells as well as the problems arising from three-dimensional cell aggregates. Although overall cell morphology changes, we demonstrate that nuclear volume and integrated intensity do not change between adherent and suspension cells (Fig. S2), and previous literature shows that trypsinization does not significantly affect cell survival and cell fate decisions21,22. This suggests that dissociation does not compromise the integrity of cells and their internal structures. In addition, cell segmentation is independent of the density of imaged cells. With this optimized experimental workflow in CellDissect that results in high contrast widefield images, we then improved nuclear segmentation by taking into consideration variable nuclear straining intensities due to differences in DNA content (Fig. 2A,B). In CellDissect, we developed an adaptive thresholding algorithm that consists of two steps. In the first step, we apply a range of thresholds to identify all the nuclei in the image (Fig. 2C–F). In the second step, we threshold each nucleus independently to account for the DAPI intensity differences, resulting in 3D segmented nuclei of high quality (Fig. 2G,H). A quantitative assessment by human experts of nuclear segmentation confirmed CellDissect’s high accuracy, outperforming manually or automatically-chosen single threshold approaches (Fig. 2I). CellDissect works very well for different types of cells imaged at different magnifications without the need for a large amount of training data or crowd sourcing approaches23.
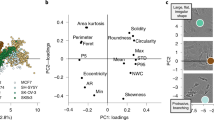
The nuclei that were initially determined are used as seeds to segment cell boundaries (Fig. 3). Qualitative comparison between widefield images and the segmented images demonstrate the high accuracy of CellDissect’s image segmentation (Fig. 3H). We then applied our CellDissect approach to other cell lines imaged at different magnifications (Fig. 4A) and continued to observe a very high accuracy in nuclear and cell segmentation of all cell types using the F1-score metric in comparison to the ground truth generated by several humans (Fig. 3H). CellDissect is written in a modular manner that is amenable to processing images either on a desktop computer or in parallel on a computing cluster to increase throughput (Fig. 4B). This essentially makes the throughput of CellDissect dependent on the number of processors available to the user. Using this throughput, we quantified nuclear and cellular characteristics of thousands of cells, determined how these differed between the cell lines we used (Figs. S3 and S4) and how they changed or stayed the same for mESCs upon trypsinization (Fig. S2). The settings for both applications are generated through a GUI that can be adapted to different cell lines and microscope modalities23,24,25. These results show highly accurate nuclear and cell segmentation without the need for large training data sets. In addition, high accuracy in nuclear and cell segmentation is achieved by only using widefield imaging and DAPI stained nuclei. Recently developed cell segmentation approaches using deep learning indicate that cell segmentation is possible at high quality but most often requires very large data sets of images and significant hardware infrastructure to infer model parameters3,9,14.
In summary, by utilizing the experimental workflow in CellDissect, we prepare high quality single-cell suspensions that are subsequently imaged at high density, resulting in high quality images. These images are then analyzed by the computational workflow in CellDissect, that consists of reliable segmentation of nuclei and cells at high accuracy for a range of cell types and magnification without the need for large training data sets.
Materials and Methods
Experimental methods
Cell culture
The Saccharomyces cerevisiae (S. cerevisiae) strain BY4741 (MATa his3∆1 leu2∆0 met15∆0 ura3∆0) was used and cultured as previously described26.
The Saccharomyces pombe (S. pombe) strain 972h- was used. Three days before the experiment, S. pombe cells were streaked out on a YES (0.0002% each of adenine, histidine, leucine, lysine, uracil (w/v), 0.25% yeast extract) + 3% glucose plate from a glycerol stock stored at −80 °C. The day before the experiment, a colony from the YES plate was inoculated in 5 ml YES + 3% glucose media (pre-culture) and grown at 32 °C. After 6–12 h, the optical density (OD) of the pre-culture was measured and the cells were diluted in new YES + 3% glucose media to reach an OD of 0.8 the next evening.
For imaging at 20x, the mouse embryonic stem cell (mESC) cell line 16.727 was grown with 1 million seeded cells on 75 cm2 tissue culture flasks with vented caps (Falcon 353110) gelatinized with EmbryoMax 0.1% Gelatin Solution (Millipore ES-006-B) for 30 minutes at 37 C and plated with 2 million C57Bl/6 mouse embryonic fibroblasts as feeder cells (Gibco A34960) and with serum + LIF media composing of: DMEM with high glucose (Life Technologies 11960-044), 15% ES Cell qualified FBS (Gibco 16141-061), 25 mM HEPES (Gibco 15630-030), 1x MEM NEAA (Life technologies 11140-050), 1x (100 U/mL) Penicillin-Streptomycin (Gibco 15140-122), 100 μM 2-mercaptoethanol (Life Technologoies 21985-023), 500 U/mL LIF (EMD Millipore ESG1106), 1x GlutaMAXTM (Gibco 35050-061), and 1x (1 mM) sodium pyruvate (Gibco 11360-070). Cells were grown at 37 °C in a 5% CO2 humidity-controlled environment for two passages before experiments.
For imaging at 100x, mESCs were thawed onto an MEF plate with conditioned media serum + LIF media as described for the 20x. The next day, media was changed with 2i media composed of: DMEM with high glucose (Life Technologies 11960-044), 25 mM HEPES (Gibco 15630-030), 0.5x MEM NEAA (Life technologies 11140-050), 1x (100 U/mL) Penicillin-Streptomycin (Gibco 15140122), 100 μM 2-mercaptoethanol (Life Technologies 21985-023), 1000 U/mL LIF (EMD Millipore ESG1106), 0.25x GlutaMAXTM (Gibco, Catalog#: 35050-061), and 1x (1 mM) sodium pyruvate (Gibco 11360-070), 20 μg/mL human insulin (Sigma I9278-5ML), 1 μM (Sigma PD0325901), 3 μM (Sigma CHIR99021), 1000 U/mL LIF (EMD Millipore ESG1107). After three days, the cells were passaged onto a plate gelatinized with 0.1% gelatin without feeders and grown for another passage.
Jurkat, Clone E6-1 (ATCC® TIB-152™), cells were cultured at 0.5-1* 106 cells/ml in RPMI 1640 media (Corning, Catalog#: 15-040-CV) containing 10% Heat inactivated FBS (Gibco 16140-071), 1x Penincillin-Streptomycin (Gibco, Catalog#: 15140-122) and 1x GlutaMAXTM (Gibco 35050-061) at 37 °C in a 5% CO2 humidity controlled environment.
Cell Fixation
S. cerevisiae were fixed in 4% formaldehyde as previously described26.
S. pombe cells were fixed with 1% formaldehyde for 15 minutes at room temperature, quenched with 150 mM glycine for 5 minutes at room temperature and set on ice for 5 minutes afterwards. They were then washed twice with 2x SSC and then permeabilized with 70% ethanol overnight.
mESCs were dissociated after washing with 1x PBS using accutase when cultured in 2i media and 0.05% trypsin when in serum + LIF media. The cell suspension was centrifuged for 5 minutes at 200 g, washed with 1x PBS, and then fixed for 8–10 minutes at room temperature with a 3.7% formaldehyde solution in 1x PBS. The cells were washed twice with 1x PBS and then permeabilized with 70% ethanol at 4 °C for at least one hour.
Jurkat cells were fixed in their media described above with 2% formaldehyde for 10 minutes at room temperature. They were centrifuged for 3 minutes at 1000 × g and then permeabilized with 100% methanol on ice.
DAPI staining
The washing and staining procedure was the same for all cells and has been previously described26, though their centrifugation times and speeds were different and matched what was described above.
Microscopy
Cells were imaged with a Nikon Ti-E microscope and Micromanager software28 using epifluorescence for DAPI and widefield with light for cell boundary detection. Live-cell time-lapse microscopy was performed in flow chambers by taking widefield and RFP fluorescent images. Microscopy on fixed cells was done in z-stacks for the DAPI stained nuclei and widefield images for cell boundary detection. Yeast cells were on 75 × 25 mm Corning microslides (2947–75 × 25) with 22 × 22 glass coverslips (12-542-B). Mammalian cells were on the ibidi 15 μ-Slide Angiogenesis (81506) in wells coated with 0.01% poly-D-lysine (Cultrex 3439-100-01) for 10 minutes.
Computational methods
Size and slice determination (GUI)
The directory and details of images to be analyzed were input into the GUI. The first image from the directory was loaded, and ellipses were drawn to approximate the maximum and minimum nuclear and cellular sizes within the image. Individual slices for the cell boundary were looked at by eye, and a range was determined for when there were bright boundaries in the image.
Nuclear Determination
For adaptive nuclear thresholding, 100 evenly-spaced thresholds between the minimum intensity and maximum intensity were calculated. For each threshold from the 10th to the 100th, a binary image of DAPI signal above the threshold was generated. MATLAB function “bwareaopen” filtered out objects that were too small or large based on the previously defined minimum and maximum nuclear sizes. All the binary images were added together, and each individual object was labeled using “bwlabeln”. It was determined for each individual object if more objects (within the size ranges) would result from removing layers from the binary images added together. Two new binary images resulted: 1) an image with a lower estimate of the nuclear area in the maximum intensity (dapi_label). For this, the maximum number of layers were removed that still had the maximum number of objects that fit the size restrictions. 2) An image with a higher estimate of the nuclear area in which the minimum number of layers were removed for maximum object number (dapi_label_low1).
For comparison, a single threshold was automatically determined. Thresholds were calculated, binary images were generated, and objects were filtered by size as described above. The threshold resulting in the maximum number of nuclei was applied, and this binary image was saved as both dapi_label and dapi_label_low1 for further processing steps.
As another comparison, a manually determined DAPI threshold was also used. A DAPI intensity threshold was picked by eye to identify the maximum number of individual nuclei (not blended together) in the image. This threshold was applied, and the resulting binary image was saved as both dapi_label and dapi_label_low1.
Nuclear Segmentation
Each object in dapi_label_low1 was investigated individually by determining a circle around the center of the object with a radius 1.3 times what would be expected from a circle matching the maximum nucleus size. The maximum intensity projection from the DAPI channel was determined inside this circle. Other nuclei in dapi_label_low1 within the circle other than the nucleus in the center were ignored. The cumulative distribution function (cdf) of DAPI intensity inside the circle was determined, and the area of the nuclear object in dapi_label_low1 was divided by the area of the circle and subtracted from 1 to find a threshold for the nucleus for the cdf. The corresponding intensity value was determined and applied to the circle in 3D (now a cylinder) to determine the nucleus. The other nuclear objects in dapi_label_low1 within the cylinder were again ignored. The objects in each slice were filled in with the MATLAB function “imfill”, and only the largest connected volume in 3D was kept. Nuclei too close to the image border were removed.
Cell segmentation
A maximum intensity projection of the slices defined by the user was used to start. A background image was generated with a disk smoothing filter over this image based on the minimum cell size. The background image was then subtracted from the maximum projected image. This image was then combined with processed DAPI image corresponding to the low estimate of nuclear area (dapi_label) using morphological reconstruction and cells were segmented with a watershed algorithm. After image segmentation, segmented elements that were too small or large elements were removed. Cells too close to the borders were also removed.
Quantification of Precision, Sensitivity, and Accuracy
To quantify sensitivity and precision, images from the DAPI and transmitted light channels as well as the segmented nuclei and cells were loaded and displayed in one overlaid image. For each cell line, 3–4 images were collected from each of 3 biological replicas. For every image in one biological replica, three experts in the lab manually scored the segmentation quality as described below. The average and standard deviation of the F-scores from the three experts were then computed. In addition, one expert in the lab manually scored the segmentation quality for all three biological replicas, and the average and standard deviation were calculated from the replicas. Experts in our lab labeled each image for false positives and false negatives for both the nuclear and cellular segmentation. A false negative was defined as a lack of segmentation for an object. A false positive was defined as a segmented object with greater than 20 percent error in its area (positive or negative). For instances where two objects were determined as one object, one false positive and one false negative was counted. Objects on the edge of the image were not counted. True positives (TP) were calculated by subtracting the number of false positives from the number of segmented objects determined by the program. Sensitivity was calculated by dividing the number of true positives by the number of false negatives (FN) plus true positives: TP/(FN + TP). Precision was calculated by dividing the number of true positives by the number of false positives (FP) plus true positives: TP/(FP + TP). The accuracy was calculated as the F1-score which is the harmonic average of the precision and sensitivity: 2(Precision × Sensitivity)/(Precision + Sensitivity).
Data Availability
The datasets and computer codes generated and/or analyzed during the current study are available in the public dropbox repository: https://www.dropbox.com/sh/egb27tsgk6fpixf/AADaJ8DSjab_c0gU7N7ZF0Zba?dl=0.
References
Conrad, C. et al. Automatic identification of subcellular phenotypes on human cell arrays. Genome Res. 14, 1130–6 (2004).
Mattiazzi Usaj, M. et al. High-Content Screening for Quantitative Cell Biology. Trends Cell Biol. 26, 598–611 (2016).
Falk, T. et al. U-Net: deep learning for cell counting, detection, and morphometry. Nat. Methods 16, 67–70 (2019).
McQuin, C. et al. CellProfiler 3.0: Next-generation image processing for biology. PLOS Biol. 16, e2005970 (2018).
Caicedo, J. C. et al. Data-analysis strategies for image-based cell profiling. Nat. Methods 14, 849–863 (2017).
Antony, P. M. A., Trefois, C., Stojanovic, A., Baumuratov, A. S. & Kozak, K. Light microscopy applications in systems biology: opportunities and challenges. Cell Commun. Signal. 11, 24 (2013).
Sommer, C., Straehle, C., Kothe, U. & Hamprecht, F. A. Ilastik: Interactive learning and segmentation toolkit. In 2011 IEEE International Symposium on Biomedical Imaging: From Nano to Macro 230–233 (2011).
Selinummi, J. et al. Bright Field Microscopy as an Alternative to Whole Cell Fluorescence in Automated Analysis of Macrophage Images. PLoS One 4, e7497 (2009).
Christiansen, E. M. et al. In Silico Labeling: Predicting Fluorescent Labels in Unlabeled Images. Cell 173, 792–803.e19 (2018).
Berchtold, D., Battich, N. & Pelkmans, L. A Systems-Level Study Reveals Regulators of Membrane-less Organelles in Human Cells. Mol. Cell 72, 1035–1049.e5 (2018).
Lyubimova, A. et al. Single-molecule mRNA detection and counting in mammalian tissue. Nat. Protoc. 8, 1743–1758 (2013).
McKinley, E. T. et al. Optimized multiplex immunofluorescence single-cell analysis reveals tuft cell heterogeneity. JCI Insight 2, e93487 (2017).
Lin, J.-R. et al. Highly multiplexed immunofluorescence imaging of human tissues and tumors using t-CyCIF and conventional optical microscopes. Elife 7, e31657 (2018).
Ounkomol, C., Seshamani, S., Maleckar, M. M., Collman, F. & Johnson, G. R. Label-free prediction of three-dimensional fluorescence images from transmitted-light microscopy. Nat. Methods 15, 917–920 (2018).
Carpenter, A. E., Kamentsky, L. & Eliceiri, K. W. A call for bioimaging software usability. Nat. Methods 9, 666–670 (2012).
Bumgarner, S. L. et al. Single-Cell Analysis Reveals that Noncoding RNAs Contribute to Clonal Heterogeneity by Modulating Transcription Factor Recruitment. Mol. Cell 45, 470–482 (2012).
Van Werven, F. J. F. J. et al. Transcription of two long noncoding RNAs mediates mating-type control of gametogenesis in budding yeast. Cell 150, 1170–1181 (2012).
Neuert, G. et al. Systematic Identification of Signal-Activated Stochastic Gene Regulation. Science (80). 339, 584–587 (2013).
Pargett, M., Gillies, T. E., Teragawa, C. K., Sparta, B. & Albeck, J. G. Single-Cell Imaging of ERK Signaling Using Fluorescent Biosensors. in. Methods in molecular biology. 1636, 35–59 (2017).
Lever, J., Krzywinski, M. & Altman, N. Classification evaluation. Nat. Methods 13, 603–604 (2016).
Heng, B. C., Cowan, C. M. & Basu, S. Comparison of Enzymatic and Non-Enzymatic Means of Dissociating Adherent Monolayers of Mesenchymal Stem Cells. Biol. Proced. Online 11, 161 (2009).
Tsuji, K. et al. Effects of Different Cell-Detaching Methods on the Viability and Cell Surface Antigen Expression of Synovial Mesenchymal Stem Cells. Cell Transplant. 26, 1089 (2017).
Altan-Bonnet, G. & Mukherjee, R. Cytokine-mediated communication: a quantitative appraisal of immune complexity. Nat. Rev. Immunol. 19, 205–217 (2019).
Hung, Y. P. et al. Akt regulation of glycolysis mediates bioenergetic stability in epithelial cells. Elife 6, e27293 (2017).
Araujo, A. R. R., Gelens, L., Sheriff, R. S. M. S. M. & Santos, S. D. M. D. M. Positive Feedback Keeps Duration of Mitosis Temporally Insulated from Upstream Cell-Cycle Events. Mol. Cell 64, 362–375 (2016).
Munsky, B., Li, G., Fox, Z. R., Shepherd, D. P. & Neuert, G. Distribution shapes govern the discovery of predictive models for gene regulation. Proc. Natl. Acad. Sci. 115, 7533–7538 (2018).
Lee, J. T. & Lu, N. Targeted Mutagenesis of Tsix Leads to Nonrandom X Inactivation. Cell 99, 47–57 (1999).
Edelstein, A. D. et al. Advanced methods of microscope control using μManager software. J. Biol. Methods 1, 10 (2014).
Acknowledgements
B.K., G.L., A.T., R.V. and G.N. are supported by NIH DP2 GM11484901, NIH R01GM115892, and Vanderbilt Startup Funds. Additionally, B.K. was supported by T32GM008320, RV was supported by T32LM012412 and A.T. is supported by an AHA predoctoral fellowship (18PRE34050016). Vanderbilt ACCRE computing cluster is supported by NIH S10OD023680. We would like to thank J.T. Lee for sharing mESC 16.7 cell line and K. Gould for sharing S. pombe 972h strain.
Author information
Authors and Affiliations
Contributions
B.K. and G.N. developed the image processing pipeline. B.K., G.L., R.V. and A.T. generated the images and analyzed the data. B.K., A.T., R.V. cultured the cells. B.K., A.T., R.V. and G.N. wrote the manuscript.
Corresponding author
Ethics declarations
Competing Interests
The authors declare no competing interests.
Additional information
Publisher’s note: Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary information
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons license, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this license, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Kesler, B., Li, G., Thiemicke, A. et al. Automated cell boundary and 3D nuclear segmentation of cells in suspension. Sci Rep 9, 10237 (2019). https://doi.org/10.1038/s41598-019-46689-5
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41598-019-46689-5
- Springer Nature Limited