
Abstract
We study the regularity of solutions of parabolic partial differential equations with inhomogeneous boundary conditions on polyhedral domains \(D\subset \mathbb {R}^3\) in the specific scale \(\ B^{\alpha }_{\tau ,\tau }, \ \frac{1}{\tau }=\frac{\alpha }{3}+\frac{1}{p}\ \) of Besov spaces. The regularity of the solution in this scale determines the order of approximation that can be achieved by adaptive numerical schemes. We show that for all cases under consideration the Besov regularity is high enough to justify the use of adaptive algorithms. Our results are in good agreement with the forerunner (Dahlke and Schneider in Anal Appl 17:235–291, 2019), where parabolic equations with homogeneous boundary conditions were investigated.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
This paper is concerned with the regularity theory of partial differential equations (=PDEs) of parabolic type. The analysis of parabolic PDEs has a long history and a lot of results concerning existence and uniqueness of solutions are known. However, in most cases, an analytic expression of the solution is not available, so that numerical algorithms for the constructive approximation of the unknown solution up to a given tolerance are needed. Our main goal here is to justify the use of adaptive schemes when solving parabolic PDEs numerically, in particular on non-smooth domains \(\Omega \subset \mathbb {R}^d\). As a prototype of our investigations one may think of the heat equation with inhomogeneous initial boundary conditions, i.e.,
where u is the unknown solution describing the distribution of heat over time, the right hand side f represents an outer heat source, g is some adequate function defined on the boundary, and \(u_0\) is a function which represents the initial temperature at time \(t = 0\). We treat more general parabolic PDEs of higher order in the course of our investigations as well.
We are interested in regularity properties of the unknown solution u in specific nonstandard smoothness spaces, i.e., the so-called adaptivity scale of Besov spaces
where \(\alpha >0\) stands for the smoothness of the solution and \(\tau \) displays its integrability. The smoothness in these scales of spaces is related with the achievable convergence order of adaptive algorithms. To briefly explain the concept, in an adaptive strategy the choice of the underlying degrees of freedom is not a priori fixed but depends on the shape of the unknown solution. In particular, additional degrees of freedom are only spent in regions where the numerical approximation is still ‘far away’ from the exact solution.
On the other hand, it is the regularity of the solution in the scale of (fractional) Sobolev spaces \(H^s(\Omega )\), where now s indicates the smoothness of u, which encodes information on the convergence order for nonadaptive (uniform) methods. Thus, we can justify the use of adaptivity if the smoothness of the exact solution of a given PDE within the scale of Besov spaces is high enough compared to its classical Sobolev smoothness, i.e., when \(\alpha >s\).
For elliptic PDEs there are a lot of positive results in this context. For example, for the Poisson equation with homogeneous Dirichlet conditions it is well-known that if the domain under consideration, the right-hand side, and the coefficients are sufficiently smooth, then the problem is completely regular and there is no reason why the Besov smoothness should be higher than the Sobolev smoothness. However, on nonsmooth (e.g. polyhedral) domains, the situation changes completely. On these domains, singularities at the boundary may occur that diminish the Sobolev regularity of the solution significantly, cf. [6, 17, 18, 20] (but can be compensated by suitable weight functions). However, recent studies show that these boundary singularities do not influence the Besov regularity too much, cf. [7, 8], so that for certain nonsmooth domains the use of adaptive algorithms is completely justified. In [29] the authors contributed to these studies and also obtained positive results for the Poisson equation with inhomogeneous (Dirichlet, Neumann as well as mixed) boundary conditions.
Concerning parabolic PDEs not much is known in this respect so far. A first step in this direction was done by Aimar et al. [1] and later on continued in [2, 3]. These studies are limited to the heat equation with zero Dirichlet boundary conditions, i.e., (1.0.1) with \(g=u_0=0\). Moreover, in [10, 11] the authors obtained Besov regularity estimates for more general linear and nonlinear parabolic PDEs but again for zero Dirichlet boundary conditions only. In good agreement with the elliptic setting in all parabolic problems studied it turns out that (again) adaptivity pays off.
Unfortunately, all results established so far for parabolic PDEs do not deal with inhomogeneous boundary conditions, which is very restrictive in view of possible applications. It is our intention to close this gap now with our investigations.
As a main tool for establishing our results we work with weighted Sobolev spaces defined on domains of polyhedral type D, whose importance in this context comes from the fact that the weights can compensate the above mentioned singularities of the solutions at the boundary. Our specific weighted Sobolev spaces (which will be briefly refered to as V-spaces in the sequel) are taken from Maz’ya, Rossmann [26] and can be seen as a refinement of the well-known Kondratiev spaces. However, in contrast to the Kondratiev spaces, our V-spaces here invoke mixed weights, which reflect in a more subtle way the distance(s) to the vertices and edges of the underlying polyhedral domain.
Kondratiev spaces have been heavily used for regularity studies in the past, since they are very much related with Besov spaces in the adaptivity scale (1.0.2), in the sense that powerful embedding results exist, see, e.g. [19].
For our purposes, in Theorem 2.10 we transfer these embeddings to the setting of our V-spaces and obtain
subject to some further restrictions on the parameters. In particular, the parameter l above denotes the smoothness and p the integrability of the function considered, whereas \(\varvec{\beta },\delta \) are exponents related with the weights measuring the distance to the vertices and edges of the domain D of polyhedral type. As can be seen from (1.0.3), having established regularity in the scale of V-spaces as well as fractional Sobolev spaces (using the coincidence \(B^{s}_{2,2}(D)=H^s(D)\)) in turn yields Besov regularity of the solution under consideration.
Having this in mind we process as follows: first we improve and generalize the findings from [10, 28] for parabolic PDEs with homogeneous boundary conditions from Kondratiev to V-spaces.
Afterwards, in order to obtain regularity results for parabolic PDEs with inhomogeneous initial boundary conditions, we adapt the proofs from [28] by reducing the inhomogenous parabolic problem to a similar (easier) one, where only homogeneous boundary terms appear (e.g. for the heat equation in (1.0.1) this leads to a similar problem with new boundary term \({\tilde{g}}=0\), a new right hand side \({\tilde{f}}\) and initial condition \({\tilde{u}}_0\), which then depend on g). There are similar strategies to reduce inhomogeneous elliptic problems to homogeneous ones, but for parabolic equations this is technically more involved and requires a more subtle analysis (in particular in view of the regularity of g). With this reduction strategy we are then able to establish Sobolev and weighted Sobolev regularity results for parabolic PDEs with inhomogeneous boundary conditions. These together with our embedding result (1.0.3) finally allow us to establish Besov and Hölder–Besov regularity for our parabolic problems.
The paper is organized as follows. In Sect. 2 we introduce the relevant function spaces needed for our investigations, in particular, the weighted Sobolev spaces (V-spaces), Besov spaces, and certain Banach-space valued function spaces as well as Hölder-spaces.
In Sect. 3 we provide regularity results in Sobolev spaces with and without time derivatives for the inhomogeneous parabolic problem. Afterwards we establish regularity results the scale of V-spaces for the homogeneous as well as the inhomogeneous problem. Then using our embedding result we deduce regularity in the scales of (Hölder-)Besov spaces. Finally, we give a short discussion and comparison of our findings with the forerunners from [28].
2 Preliminaries
Notation
We start by collecting some general notation used throughout the paper. As usual, \(\mathbb {N}\) stands for the set of all natural numbers, \(\mathbb {N}_0={\mathbb {N}}\cup \{0\}\), \(\mathbb {Z}\) denotes the integers, and \(\mathbb {R}^d\), \(d\in \mathbb {N}\), is the d-dimensional real Euclidean space with |x|, for \(x\in \mathbb {R}^d\), denoting the Euclidean norm of x. Moreover, by \([\cdot ]\) we denote the floor function \( [x]:=\max \{m\in \mathbb {Z}: \, m\le x\} \) for \(x\in \mathbb {R}\). Let \(\mathbb {N}_0^d\) be the set of all multi-indices, \(\alpha = (\alpha _1, \ldots ,\alpha _d)\) with \(\alpha _j\in \mathbb {N}_0\) and \(|\alpha |:= \sum _{j=1}^d \alpha _j\). Then for partial derivatives we write \(\partial ^\alpha f=\frac{\partial ^{|\alpha |}f}{\partial x^\alpha }\). Furthermore, \(B_r(x)\) is the open ball of radius \(r >0\) centered at x.
We denote by c a generic positive constant which is independent of the main parameters, but its value may change from line to line. The expression \(A\lesssim B\) means that \( A \le c\,B\). If \(A \lesssim B\) and \(B\lesssim A\), then we write \(A \sim B\).
Throughout the paper ’domain’ always stands for an open and connected set. The test functions on a domain \(\Omega \) are denoted by \(C^{\infty }_0(\Omega )\). Let \(L_p(\Omega )\), \(1\le p\le \infty \), be the Lebesgue spaces on \(\Omega \) as usual. We denote by \({C}(\Omega )\) the space of all bounded continuous functions \(f:\Omega \rightarrow \mathbb {R}\) and \({C}^k(\Omega )\), \(k\in \mathbb {N}_0\), is the space of all functions \(f\in {C}(\Omega )\) such that \(\partial ^{\alpha }f\in {C}(\Omega )\) for all \(\alpha \in \mathbb {N}_0\) with \(|\alpha |\le k\), endowed with the norm \(\sum _{|\alpha |\le k}\sup _{x\in \Omega }|\partial ^{\alpha }f(x)|\).
Moreover, the set of distributions on \(\Omega \) will be denoted by \({\mathcal {D}}'(\Omega )\), whereas \({\mathcal {S}}'(\mathbb {R}^d)\) denotes the set of tempered distributions on \(\mathbb {R}^d\).
Lipschitz diffeomorphism and Lipschitz domain
We say that the one-to-one mapping \(\Phi :\mathbb {R}^d\rightarrow \mathbb {R}^d\) is a Lipschitz diffeomorphism, if the components \(\Phi _k(x)\) of \(\Phi (x)=(\Phi _1(x),\ldots ,\Phi _d(x))\) are Lipschitz functions on \(\mathbb {R}^d\) and
where the equivalence constants are independent of x and y. Then the inverse of \(\Phi \) is also a Lipschitz diffeomorphism on \(\mathbb {R}^d\). We define a Lipschitz domain according to [28, Def. 2.1.1] as follows: Let \(\Omega \) be a bounded domain in \(\mathbb {R}^d\) with boundary \(\Gamma =\partial \Omega \). Then \(\Omega \) is said to be a (bounded) Lipschitz domain, if there exist N open balls \(K_1,\ldots ,K_N\) such that \(\ \bigcup _{j=1}^N K_j \supset \Gamma \) and \(K_j\cap \Gamma \ne \emptyset \) if \(j=1,\ldots ,N\), with the following property: for every ball \(K_j\) there are Lipschitz diffeomorphisms \(\psi ^{(j)}\) such that \( \psi ^{(j)}:\, K_j \longrightarrow V_j\) for \(j=1,\ldots ,N\), where \(V_j:=\psi ^{(j)}(K_j)\) and
Sobolev and fractional Sobolev spaces
Let \(m \in \mathbb {N}_0\) and \(1\le p \le \infty \). Then \(W^{m}_p(\Omega )\) denotes the standard \(L_p\)-Sobolev spaces of order m on the domain \(\Omega \), equipped with the norm
By \(\mathring{W}^m_{p}(\Omega )\) we denote the closure of \({\mathcal {D}}(\Omega )\) in \(W^m_p(\Omega )\), where \({\mathcal {D}}(\Omega )\) stands for the collection of all infinitely differentiable functions with support compactly contained in \(\Omega \).
If \(p=2\) we shall also write \(H^m(\Omega )\) instead of \(W^m_2(\Omega )\). Moreover, for \(s\in \mathbb {R}\) we define the fractional Sobolev spaces \({H}^s(\mathbb {R}^d)\) as the collection of all \(u\in {\mathcal {S}}'(\mathbb {R}^d)\) such that
where \({\mathcal {F}}\) denotes the Fourier transform with inverse \({\mathcal {F}}^{-1}\). These spaces partially coincide with the classical Sobolev spaces for \(s=m\) with \(m\in \mathbb {N}_0\). Corresponding spaces on domains can be defined via restrictions of functions from \({H}^s(\mathbb {R}^d)\) equipped with the norm
If, additionally, \(\Omega \subset \mathbb {R}^d\) is a bounded Lipschitz domain, then for \(s=m+\sigma \) with \(m\in \mathbb {N}_0\) and \(\sigma \in (0,1)\), an alternative norm comes from the Sobolev–Slobodeckij spaces and is given by
This follows from the extension operator in [17, Thm. 1.2.10] and the fact that the corresponding spaces defined on \(\mathbb {R}^d\) coincide, cf. [33, Sect. 2.3.5].
The following definition of domains of polyhedral type can be found in [26, Def. 4.1.1].
Definition 2.1
A bounded domain \(D\subset \mathbb {R}^3\) is said to be a domain of polyhedral type if
-
(i)
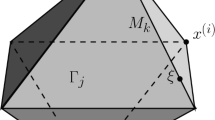
the boundary \(\partial D\) consists of smooth (of class \(C^{\infty }\)) open two-dimensional manifolds \(\Gamma _j\) (the faces of D), \(j = 1,\ldots ,n\), smooth curves \(M_k\) (the edges), \(k = 1,\ldots ,d\), and vertices \(x^{(1)},\ldots ,x^{(d')}\),
-
(ii)
for every \(\xi \in M_k \) there exist a neighborhood \({\mathcal {U}}_{\xi }\) and a diffeomorphism (a \(C^{\infty }\) mapping) \(\kappa _{\xi }\) which maps \(D\cap {\mathcal {U}}_{\xi } \) onto \({\mathcal {D}}_{\xi }\cap B_1\), where \( {\mathcal {D}}_{\xi }\) is a dihedron and \(B_1\) is the unit ball,
-
(iii)
for every vertex \(x^{(j)}\) there exist a neighborhood \({\mathcal {U}}_j\) and a diffeomorphism \(\kappa _j\) mapping \(D\cap {\mathcal {U}}_j\) onto \(K_j\cap B_1 \), where \(K_j\) is a cone with edges and vertex at the origin.
The set \(M_1\cup \cdots \cup M_d\cup \{ x^{(1)},\ldots ,x^{(d')} \} \) of the singular boundary points is denoted by S.
Remark 2.2
-
We do not exclude the cases \(d=0\) and \(d'=0\). In the latter case, the set S consists only of smooth non-intersecting edges. In Fig. 1 we can see a typical domain of polyhedral type, the so called Fichera corner. Figures 2 and 3 illustrate the cases when \(d=0\) and \(d'=0\), respectively.
-
Not every domain of polyhedral type is a Lipschitz domain. An easy counterexample is given by two cuboids lying on top of each other, cf. [15, Example 6.5].

A domain of polyhedral type

The case \(d=0\)

The case \(d'=0\)
2.1 Weighted Sobolev spaces for domains of polyhedral type
In order to study the regularity of parabolic PDEs in weighted Sobolev spaces on domains of polyhedral type we introduce in this subsection the space \(V_{\varvec{\beta },\delta }^{l,p}(D)\) using [26, Subsec. 4.1.2] with D being a bounded domain of polyhedral type.
Definition 2.3
Let \(D\subset \mathbb {R}^3\) be a bounded domain of polyhedral type with edges \(M_1,\ldots ,M_d\) and vertices \(x^{(1)},\ldots ,x^{(d')}\). We denote the distance of x from the edge \(M_k\) by \(r_k(x)\) and the distance from the vertex \(x^{(j)} \) by \(\rho _j(x)\). Furthermore, we denote by \(X_j\) the set of all indices k such that the vertex \(x^{(j)} \) is an end point of the edge \(M_k\). Let \({\mathcal {U}}_1,\ldots ,{\mathcal {U}}_{d'}\) be domains in \(\mathbb {R}^3\) such that
Then for \(l\in \mathbb {N}_0\), \(1<p<\infty \), \(\varvec{\beta }=(\beta _1,\ldots ,\beta _{d'})\in \mathbb {R}^{d'}\) and \(\delta =(\delta _1,\ldots ,\delta _{d})\in \mathbb {R}^d\), we define \(V_{\varvec{\beta },\delta }^{l,p}(D)\) as the closure of the set \(C_0^{\infty }({\overline{D}}{\setminus }S) \) with respect to the norm
Remark 2.4
We collect some remarks and properties of the weighted Sobolev spaces \( V_{\varvec{\beta },\delta }^{l,p}(D)\).
-
The space \( V_{\varvec{\beta },\delta }^{l,p}(D)\) is Banach space. The proof can be derived from a generalized result e.g. from [23, p. 18, Thm. 3.6].
-
\(V_{\varvec{\beta },\delta }^{l,p}(D) \subset L_p(D)\) for \(l\ge \beta _j,\, j=1,\ldots ,d' \) and \(l\ge \delta _k,\, k=1,\ldots ,d\).
-
Similarly as in [30, Rem. 2.2, Subsec. 2.1] it can be shown that a function \(\varphi \in C^l(D)\) is a pointwise multiplier in \(V_{\varvec{\beta },\delta }^{l,p}(D)\), i.e., for \(u\in V_{\varvec{\beta },\delta }^{l,p}(D)\) we have
$$\begin{aligned} \Vert \varphi u|V_{\varvec{\beta },\delta }^{l,p}(D)\Vert \le c \Vert u|V_{\varvec{\beta },\delta }^{l,p}(D)\Vert . \end{aligned}$$ -
The weighted Sobolev spaces \( V_{\varvec{\beta },\delta }^{l,p}(D)\) are refinements of the Kondratiev spaces \({\mathcal {K}}_{a,p}^m(D)\), cf. [9, Rem. 4 (ii)].
-
The space \(V_{\varvec{\beta },\delta }^{l,p}(D) \) does not depend on the choice of the domains \({\mathcal {U}}_j\), cf. [26, Subsec. 4.1.2, p. 142].
-
If \(s,\,t\in \mathbb {R}\), then by \(V_{\varvec{\beta }+s,\delta +t}^{l,p}(D) \) we mean the space \(V_{\varvec{\beta }',\delta '}^{l,p}(D) \) with the weight parameters \(\varvec{\beta }'=(\beta _1+s,\ldots ,\beta _{d'}+s )\) and \(\delta '=(\delta _1+t,\ldots ,\delta _d+t) \).
-
For \(p=2\) we use the abbreviation \(V_{\varvec{\beta },\delta }^{l}(D):=V_{\varvec{\beta },\delta }^{l,2}(D) \).
-
The closure of the set \(C_0^{\infty }(D)\) in \(V_{\varvec{\beta },\delta }^{l,p}(D) \) is denoted by \(\mathring{V}_{\varvec{\beta },\delta }^{l,p}(D) \).
-
The space \(V_{\varvec{\beta },\delta }^{-l,p}(D) \) denotes the dual space of \(\mathring{V}_{-\varvec{\beta },-\delta }^{l,p'}(D) \), \(p'=p/(p-1)\), with respect to the dual pairing \(\langle \cdot , \cdot \rangle _{D}:=\langle \cdot , \cdot \rangle _{ V_{\varvec{\beta },\delta }^{-l,p}(D)\times \mathring{V}_{-\varvec{\beta },-\delta }^{l,p'}(D)}\). This space is provided with the norm
$$\begin{aligned} \Vert u|V_{\varvec{\beta },\delta }^{-l,p}(D) \Vert =\sup \{ | \langle u,v\rangle _D |\, : \, v \in \mathring{V}_{-\varvec{\beta },-\delta }^{l,p'}(D) , \, \Vert v| V_{-\varvec{\beta },-\delta }^{l,p'}(D) \Vert =1 \}. \end{aligned}$$ -
Moreover, for \(l\ge 1\) we denote by \(V_{\varvec{\beta },\delta }^{l-1/p,p}(\Gamma _j) \) the trace space for \(V_{\varvec{\beta },\delta }^{l,p}(D)\) on the face \(\Gamma _j\) of D. The corresponding norm is defined as
$$\begin{aligned} \Vert u|V_{\varvec{\beta },\delta }^{l-1/p,p}(\Gamma _j) \Vert =\inf \{\Vert v| V_{\varvec{\beta },\delta }^{l,p}(D)\Vert : \, v\in V_{\varvec{\beta },\delta }^{l,p}(D),\ v=u \text { on } \Gamma _j \}. \end{aligned}$$
We provide embeddings between the spaces \( V_{\varvec{\beta },\delta }^{l,p}(D)\), which will be needed later on when establishing our regularity results. First, we recall [26, Lem. 4.1.3].
Lemma 2.5
Let \(l,\,l'\) be nonnegative integers and \(1<p\le q<\infty \) such that \(l-3/p\ge l'-3/q\). Then we have the embedding
if \(\beta _j-l+3/p\le \beta _j'-l'+3/q\) for \(j=1,\ldots ,d'\), and \(\delta _k-l+3/p \le \delta '_k-l'+3/q\) for \(k=1,\ldots ,d\).
Remark 2.6
-
An analogous result holds for the trace spaces \(V_{\varvec{\beta },\delta }^{l-1/p,p}(\Gamma _j) \) in view of [26, Lem. 4.1.5].
-
Lemma 2.5 holds for arbitrary integers \(l,l'\) when \(p=q=2\). This follows from the following consideration:
Let \(l'\le l\le 0\), \(\beta _j-l\le \beta _j'-l'\) for \(j=1,\ldots ,d'\), and \(\delta _k-l \le \delta '_k-l'\) for \(k=1,\ldots ,d\). Then, applying Lemma 2.5 we obtain
$$\begin{aligned} \mathring{V}_{-\varvec{\beta }',-\delta '}^{-l'}(D) \hookrightarrow \mathring{V}_{-\varvec{\beta },-\delta }^{-l}(D). \end{aligned}$$Since the spaces \( V_{\varvec{\beta },\delta }^{l}(D),\,V_{\varvec{\beta }',\delta '}^{l'}(D)\) are the dual spaces of \(\mathring{V}_{-\varvec{\beta },-\delta }^{-l}(D)\) and \(\mathring{V}_{-\varvec{\beta }',-\delta '}^{-l'}(D) \), respectively, it follows that
$$\begin{aligned} V_{\varvec{\beta },\delta }^{l}(D)\hookrightarrow V_{\varvec{\beta }',\delta '}^{l'}(D). \end{aligned}$$(2.1.2)It remains to consider the case when \(l'\le 0 \le l\). Then applying Lemma 2.5 and (2.1.2) we have the embeddings
$$\begin{aligned} V_{\varvec{\beta },\delta }^{l}(D)\hookrightarrow V_{\varvec{\beta }'-l',\delta '-l'}^{0}(D)\hookrightarrow V_{\varvec{\beta }',\delta '}^{l'}(D). \end{aligned}$$(2.1.3)
Lemma 2.5 and Remark 2.6 yield the following special cases which we shall use later on.
Corollary 2.7
For \(l\ge 0\) we have the embeddings
for all \(j=1,\ldots ,d'\) and \(k=1,\ldots ,d\).
2.2 Besov spaces via wavelets
Under certain restrictions on the parameters, the Besov spaces \(B_{p,q}^s\), defined by the classical approach via higher order differences or alternatively by the Fourier-analytical approach coincide and even allow an equivalent characterization in terms of wavelet decompositions, see e.g. [33, 34] and also [5, 25]. Therefore, in this section we introduce Besov spaces via wavelet decompositions as in [19, Sec. 2, p. 563], since this characterization is extremely convenient for our purposes when providing embedding results between weighted Sobolev and Besov spaces later on. Consider the wavelet construction of Daubechies, see e.g. [13, 14], with the mother function \(\eta \) and the scaling function \(\phi \), which satisfy the following conditions:
We set \(\psi ^0=\phi \), \(\psi ^1=\eta \), define E as the set of the nontrivial vertices of \([0,1]^d\), and put
Moreover, let \( \Psi ':=\{\psi ^e: \, e\in E \} \) and consider the set of dyadic cubes,
Now we put \(\Lambda '={\mathcal {D}}^+\times \Psi '\), where \({\mathcal {D}}^+\) is the set of the dyadic cubes with measure at most 1. Furthermore, we use the notation \({\mathcal {D}}_j:=\{I\in {\mathcal {D}}: \, |I|=2^{-jd}\}\). The functions from \(\Psi '\) are rescaled in the following way:
Then the set \(\{ \psi _I:\, I\in {\mathcal {D}},\, \psi \in \Psi ' \}\) forms an orthonormal basis in \(L_2(\mathbb {R}^d)\). Let Q(I) denote some dyadic cube of minimal size such that \( \text {supp}\,\psi _I\subset Q(I)\) for every \(\psi \in \Psi '\). Then we can write every function \(f\in L_2(\mathbb {R}^d)\) as
where \(P_0\) is the orthogonal projector onto the closure of the span of the function \(\Phi (x)=\phi (x_1)\cdots \phi (x_d)\) and its integer shifts \(\Phi (\cdot -k),\, k\in \mathbb {Z}^d\), in \(L_2(\mathbb {R}^d)\). It will be convenient to include \({\phi }\) into the set \(\Psi '\). We use the notation \({\phi }_I:=0\) for \(|I|<1\), \({\phi }_I={\phi }(\cdot -k)\) for \(I=k+[0,1]^d\), and can simply write
With these considerations we can now define Besov spaces \(B^s_{p,q}(\mathbb {R}^d)\) by decay properties of the wavelet coefficients, if the parameters fulfill certain conditions, as follows.
Definition 2.8
Let \(0<p,q<\infty \) and \(s>\max \left( 0,d(\frac{1}{p}-1)\right) \). Choose \(r\in \mathbb {N}\) such that \(r > s\) and construct a wavelet Riesz basis as described above. Then the function \(f\in L_p(\mathbb {R}^d)\) belongs to the Besov space \(B_{p,q}^s(\mathbb {R}^d)\) if it admits a decomposition of the form
(convergence in \( {\mathcal {S}}'(\mathbb {R}^n) \)) with
Corresponding spaces on domains \(\Omega \subset \mathbb {R}^d\) can be defined by restriction via
normed by
Remark 2.9
-
We mention that according to [27] for a bounded Lipschitz domain \(\Omega \) there exists a universal extension operator \(E:B_{p,q}^s(\Omega )\longrightarrow B_{p,q}^s(\mathbb {R}^d)\) satisfying
$$\begin{aligned} \Vert Eu|B_{p,q}^s(\mathbb {R}^d)\Vert \lesssim \Vert u|B_{p,q}^s(\Omega )\Vert . \end{aligned}$$ -
Moreover, when \(p=q=2\) the Besov spaces coincide with the fractional Sobolev spaces, i.e., in this case we have the coincidence \(B^s_{2,2}(\Omega )=H^s(\Omega )\), \(s>0\).
-
For \(r=0,\, p=q\) we use the convention \(B_{p,p}^0(\Omega ):=L_p(\Omega )\) in view of the embedding \(B_{p,p}^s(\Omega )\hookrightarrow L_p(\Omega )\) for \(s>0\) and \(0<p<\infty \).
Using the wavelet characterization of the Besov spaces, in [29, Thm. 3.1, Sec. 3] we established an embedding result on polyhedral cones, which displays the close relation between the V- and Besov spaces, respectively. Applying localization arguments we now generalize this embedding for domains of polyhedral type, which will be one of our main tools when investigating the Besov regularity of solutions for the parabolic problems.
Theorem 2.10
(Embeddings on domains of polyhedral type) Let D be a bounded domain of polyhedral type in \(\mathbb {R}^3\) with edges \(M_1,\ldots ,M_d\) and vertices \(x^{(1)},\ldots ,x^{(d')} \). Moreover, let \(s>0\), \(l\in \mathbb {N}_0\), \(1< p<\infty \), \(\varvec{\beta }=(\beta _1,\ldots ,\beta _{d'})\in \mathbb {R}^{d'}\) with \(l> \max _{j=1,\ldots ,d'}\beta _j\) and \(\delta =(\delta _1,\ldots ,\delta _d)\in \mathbb {R}^d\) with \(|\delta ^+|=\sum _{j=1}^d \max (\delta _j,0)\). Then we have a continuous embedding
where
Proof
Step 1: The weighted Sobolev space \(V_{\beta ,\delta }^{l,p}(K)\) can be seen as a subcase of Definition 2.1 for the bounded polyhedral cone K with edges \(M_1,\ldots ,M_d\), since K is also a domain of polyhedral type, where now \(d'=1\), \(\varvec{\beta }=\beta \in \mathbb {R}\), \( X_1=\{1,\ldots ,d\}\) in the norm (2.1.1), and the integral domain \(D\cap {\mathcal {U}}_1\) is now K itself with \( {\mathcal {U}}_1\) being the unit ball around the vertex of the cone.
Moreover, according to their definition, domains of polyhedral type D can be covered by domains \({\mathcal {U}}_1,\ldots ,{\mathcal {U}}_{d'}\) such that
i.e., if \(M_k\) is not adjacent to \(x^{(j)}\). Since the diffeomorphisms \(\kappa _j\) in Definition 2.1 are \(C^{\infty }\) (and therefore also Lipschitz-diffeomorphisms), we have \(|\kappa _j(x)-\kappa _j(y)|\sim |x-y|\) and \(|\kappa _j^{-1}(x)-\kappa _j^{-1}(y)|\sim |x-y|\) for \(|x-y|\le 1\). This yields
using the transformation theorem, where \(\kappa _j(D\cap {\mathcal {U}}_j)\) is a bounded polyhedral cone according to Definition 2.3 and \(\delta ^{(j)}\) contains the components of \(\delta \) related to the edges of the cone \(\kappa _j(D\cap {\mathcal {U}}_j)\), i.e., the components with indices from \(X_j\).
Since the definition of the spaces \(V_{\varvec{\beta },\delta }^{l,p}(D)\) is independent of the covering \({\mathcal {U}}_j\), cf. Remark 2.4, we can take a slightly larger covering \({\mathcal {U}}_j':=\{ x\in \mathbb {R}^3: \,\text {dist} (x,{\mathcal {U}}_j)<\varepsilon \} \supset {\mathcal {U}}_j\) such that
where \(\varepsilon >0\) is sufficiently small. Furthermore, we can take a subordinated family \(\{ \psi _j' \}_{j=1}^{d'}\) of smooth functions satisfying
for \(j=1,\ldots ,d'\), and define a resolution of unity subject to \({\mathcal {U}}'_j\) as follows:
for \(x\in D\). The functions \(\eta _j\) are well defined since \(\sum _{j=1}^{d'}\psi _j'(x) \) is non-zero for all \(x\in {\mathcal {U}}_j\), \(j=1,\ldots ,d'\). Furthermore, since every point in D is covered at least once and at most \(d'\)-times by \({\mathcal {U}}_j\), we have for \(x\in D\) that
We now show that the following norms are equivalent:
Using (2.2.2), (2.2.3), (2.2.4), and the fact that the functions \(\eta _j\in C^{\infty }\) are pointwise multipliers in the spaces \(V_{\beta _j,\delta ^{(j)}}^{l,p}(\kappa _j(D\cap {\mathcal {U}}_j)) \), we calculate
which shows (2.2.5).
Step 2: As for the Besov spaces involved in the embedding (2.2.1), we can apply the localization principle from [34, Thm. 2.4.7(ii)] to \(B_{p,p}^s(D)\). In particular a close inspection of the proof of that theorem together with [34, Sect. 2.4.7, Rem. 2] yields that our functions \(\eta _j\) can be used for the localization, since we have a good control of their supports and derivatives. This altogether shows
where the latter step was proven (even for anisotropic Besov spaces) in [21, Thm. 23]. A corresponding estimate holds for the term with \(B_{\tau ,\tau }^r(D)\).
Step 3: In [29, Thm. 3.1] we have shown that on polyhedral cones it holds
hence,
Taking the pth power on both sides and summing over \(j=1,\ldots ,d'\) together with (2.2.5) and (2.2.6) we obtain the desired result
\(\square \)
Remark 2.11
We briefly discuss the role of \(\varvec{\beta }\) and \(\delta \), where for simplicity we assume that \(\varvec{\beta }\) has the same components, i.e., \(\varvec{\beta }=(\beta ,\ldots ,\beta )\) for some \(\beta \in \mathbb {R}\). In particular, these two parameters “compensate” possible singularities at the vertices or at the edges of the domain of polyhedral type D with the help of the weight functions \(\rho _j\) and \(r_k\), respectively. Moreover, in order to deal with \(L_p\) functions we require that \(\beta _j\le l\) for all \(j=1,\ldots ,d'\) and \(\delta _i\le l\) for all \(i=1,\ldots ,d\), cf. Remark 2.4 (the second condition is incorporated in the even more restrictive inequality \(0\le r<3(l-|\delta ^+|)\)). Moreover, by using [26, Lem. 4.1.3], we see that
for all \(k=1,\ldots , d\), which implies \(|\delta |\le |\delta '|\). Furthermore, the smaller \(|\delta ^+|\), the greater the smoothness parameter \(r<3(l-|\delta ^+|)\) can be chosen. The embedding (2.2.7) of the V-scale is reflected in the condition for r, since decreasing values of \(|\delta ^+|\) correspond to shrinking V-spaces, which then in turn can be embedded into smaller Besov spaces, i.e. with larger smoothness parameters r (and hence a growing upper bound for r can be observed).
The dependence on \(\varvec{\beta }\) is slightly different. Also in this context from [26, Lem. 4.1.3] we deduce for \(\varvec{\beta }'=(\beta ',\ldots ,\beta ')\in \mathbb {R}^{d'}\) that
Therefore, in this case we see that for every (fixed) l we can choose any \(\beta <l\) with the effect that the resulting space \(V^{l,p}_{\varvec{\beta },\delta }(D)\) still embeds into the same Besov space with smoothness \(r<\min \{l,3(l-|\delta ^+|)\}\) independent of \(\varvec{\beta }\) (again ignoring the dependence on s for the moment). Moreover, the weight parameter \(\varvec{\beta }\) (connected to the distances to the vertices of D) not playing any role in the condition on r (besides the requirement \(\max _{j=1,\ldots ,d'}\beta _j=\beta <l\) needed for the embedding into \(L_p\)) is analogous to previous results for smooth cones, cf. [12, Sec. 2], where the singular set is just a point (of dimension 0).
2.3 Banach-space valued function spaces
In order to investigate parabolic problems in the sequel we introduce some Banach-valued function spaces following [28, Subsec. 2.2.2].
Definition 2.12
Let X be a Banach space and \(I\subset \mathbb {R}\) some interval. We denote by \(L_p(I,X)\), \(1\le p\le \infty \), the space of (equivalence classes of) measurable functions \(u\,:\,I\rightarrow X\) such that the mapping \(t\mapsto \Vert u(t)\Vert _X\) belongs to \(L_p(I)\), which is endowed with the norm
Furthermore, for \(m\in \mathbb {N}_0\) we denote by \(W_p^m(I,X)\) the space of all functions \(u\in L_p(I,X)\), whose weak derivatives of order \(0\le k\le m \) belong to \( L_p(I,X)\), normed by
Moreover, if \(p=2\) we write \(H^m(I,X):= W_2^m(I,X)\).
Remark 2.13
The spaces \( L_p(I,X)\) and \(W_p^m(I,X) \) are Banach spaces, cf. [10, Subsec. 2.2, p. 10].
In particular, for \(D_{T}=(0,T] \times D\) with D being some domain of polyhedral type we abbreviate
where \((H^{m}(D))'\) denotes the dual space of \(H^m(D)\). Moreover, we put
normed by
where \(\mathring{H}^m(D) \) denotes the closure of \({\mathcal {D}}(D)\) in \(H^m(D)\) and \(H^{-m}(D)\) stands for the dual space \((\mathring{H}^m(D))'\). Moreover, the pairing \((\cdot , \cdot )_{L_2(D)}\) (or \((\cdot ,\cdot )\) if there is no danger of confusion) denotes the inner product in \(L_2(D)\) whereas \(\langle \cdot , \cdot \rangle \) is the dual pairing of \(\mathring{H}^m(D)\) and \(H^{-m}(D)\) or \(H^m(D)\) and \((H^{m}(D))'\), respectively. Furthermore, we define the space
normed as in (2.3.1) with obvious modifications.
Since \(\mathring{H}^m(D)\hookrightarrow H^m(D)\) and \((H^m(D))'\hookrightarrow H^{-m}(D)\) we have the embeddings
where the respective norms for the spaces considered in the second embedding are essentially the same.
For later use we need also the following embedding theorem which is a direct consequence of the proof of [28, Thm. 2.4.12].
Theorem 2.14
Let \(X,\,X_1,\,X_2\) be Banach spaces such that \(X_1\cap X_2 \hookrightarrow X \). Moreover, let \(k\in \mathbb {N}_0\), \(0<p\le \infty \), and \(0<T<\infty \). Then the following embedding holds
Furthermore, for \(u\in W^k_p([0,T],X_1) \cap W^k_p([0,T],X_2)\) we have the estimate
In the sequel we shall need the following Banach-space valued Hölder spaces, which can be also found in [28, Subsec. 2.2.2].
Definition 2.15
(Hölder spaces) Consider a Banach space X and an interval \(I = [0,T]\subset \mathbb {R}\) with \(T<\infty \). We write C(I, X) for the space consisting of all bounded and (uniformly) continuous functions \(u: I\rightarrow X\) normed by
Moreover, we say that \(u\in C^k(I,X)\), \(k\in \mathbb {N}_0\), if u has a Taylor expansion
for all \(t+h\), \(t\in I\) such that \(u^{(j)}(t)\) depends continuously on t for all \(j = 0,\ldots ,k\) and \( \lim _{|h|\rightarrow 0}\frac{\Vert r_k(t,h)|X\Vert }{|h|^k}=0. \) The space \(C^k(I,X)\) is then equipped with the following norm
Given \(\alpha \in (0,1)\), we denote by \(C^{\alpha }(I,X)\) the Hölder space containing all \(u \in C(I,X)\) such that
Consequently, \({\mathcal {C}}^{k,\alpha }(I,X)\) contains all functions \(u \in C(I,X)\) such that
Remark 2.16
-
(i)
We have the following embedding
$$\begin{aligned} H^1([0,T], H^m, (H^m)')\hookrightarrow C([0,T],L_2(D)). \end{aligned}$$(2.3.2)This can be shown as follows: For real Hilbert spaces V, H such that \( V\hookrightarrow H=H' \hookrightarrow V' \) with dense embeddings it holds that
$$\begin{aligned} u\in L_2([0,T],V), \quad u'\in L_2([0,T],V')\quad \text {implies} \quad u\in C([0,T],H), \end{aligned}$$(2.3.3)cf. [35, Thm. 25.5]. For \(u\in H^1([0,T], H^m, (H^m)') \) we have \(u\in L_2([0,T],H^m(D))\) and \(u'\in L_2([0,T],(H^m(D))')\). Then choosing \(V=H^m(D)\) and \(H=L_2(D)\) in (2.3.3) with \(H^m(D)\hookrightarrow L_2(D)\hookrightarrow (H^{m}(D))'\) dense, we obtain (2.3.2).
Moreover, in a similar way we can show that
$$\begin{aligned} H^1([0,T], \mathring{H}^m, H^{-m}) \hookrightarrow C([0,T],L_2(D)), \end{aligned}$$(2.3.4)choosing \(V=\mathring{H}^m(D)\) and \(H=L_2(D)\) in (2.3.3), since \( \mathring{H}^m(D)\hookrightarrow L_2(D)\hookrightarrow (H^{-m}(D)) \) with dense embeddings.
-
(ii)
Furthermore, for some (quasi-)Banach space Y with \(X\hookrightarrow Y\) it holds that
$$\begin{aligned} C^k(I,X) \hookrightarrow C^k(I, Y ) \quad \text {and}\quad {\mathcal {C}}^{k,\alpha }(I,X)\hookrightarrow {\mathcal {C}}^{k,\alpha }(I,Y), \end{aligned}$$(2.3.5)see e.g. in [28, Remark 2.2.4]. Moreover, for \(1<p<\infty \) and \(m\in \mathbb {N}\), we have a generalized version of Sobolev’s embedding theorem,
$$\begin{aligned} W^m_p(I,X)\hookrightarrow {\mathcal {C}}^{m-1,1-\frac{1}{p}}(I,X), \end{aligned}$$(2.3.6)cf. [28, Thm. 2.2.5].
For later use we provide the following auxiliary embedding result which is a generalization of [16, Thm. 4, § 5.9.2].
Lemma 2.17
Let D be an open bounded Lipschitz domain, \(m\in \mathbb {N}_0\), and \(k\in \mathbb {N}\). Suppose that \(u\in L_2([0,T],H^{m+2k}(D))\) with \(\partial _t u\in L_2([0,T],H^m(D))\). Then
and the following estimate holds
where the constant C is independent of u.
Proof
The proof is based on the proof in [16, Thm. 4, § 5.9.2] with suitable modifications according to our needs. We consider first \(m=0\), in which case
We select a bounded open set \( V \supset \supset D\) and construct the corresponding extension \({\bar{u}}:=Eu\) using the extension operator from [31, Chap. VI, §3.1, Thm. 5] (in particular, we have \(\textrm{supp}(Eu)\subset V\), see [31, Formula (31) on p. 191]). Moreover, since
we see that \({\bar{u}}\in L_2([0,T],H^{2k}(V))\) and
for an appropriate constant C independent of u. Moreover, since E is a universal extension operator, it is also an extension operator from \(L_2(D)\) into \(L_2(V)\), and hence, by a similar argument as in [16, Thm. 4, § 5.9.2] we obtain that \( \partial _t{\bar{u}}\in L_2([0,T],L_2(V))\) with the estimate
We proceed by assuming for the moment that \( {\bar{u}}\) is a smooth function. We then compute
where we used Hölder’s inequality, the inequality \(2ab\le a^2+b^2\), and the fact that there is no boundary term when we integrate by parts, since the extension \({\bar{u}}\) has compact support within V. Integrating both sides of (2.3.10) w.r.t. the time-variable t from \(s_1\) to \(s_2\) for \(0\le s_1 \le s_2\le T\) we obtain
Since (2.3.11) holds for arbitrary \(0\le s_1 \le s_2\le T\) we choose them such that one of \(s_1,\, s_2\) provides the minimum of \(\Vert {\bar{u}}(\cdot )|H^{k}(V)\Vert \) and the other one provides the maximum. We denote them by \(t_{\max }\) and \(t_{\min }\), respectively. Then for the left-hand side of (2.3.11) we calculate w.l.o.g. for \(s_1=t_{\min }\), \(s_2=t_{\max }\) that
Moreover, we have
Considering (2.3.11), (2.3.12), and (2.3.13) we deduce
where C depends only on T. The estimate (2.3.14) together with (2.3.8) and (2.3.9) yields the desired result,
The case when u is not smooth follows by approximating u using a mollifier, i.e., \(u^{\varepsilon }=\eta _{\varepsilon }*u\), as in in [16, Thm. 4, § 5.9.2]. As above it follows in this case that \(u\in C([0,T], H^k(D))\).
It remains to show the case when \(m\ge 1\), which can be reduced to the case when \(m=0\) as follows. Let \(\alpha \) be a multiindex of order \( |\alpha |\le m\) and set \(v_{\alpha }:=\partial _x^{\alpha }u\). Then
Hence, we can apply (2.3.15), with u replaced by \(v_{\alpha }\), and sum over all indices \( |\alpha |\le m\) which leads to the desired estimate (2.3.7). This completes the proof. \(\square \)
2.4 The fundamental parabolic problems
We present the fundamental parabolic problems with homogeneous and inhomogeneous boundary conditions, that we want to consider in the sequel. Let \(D\subset \mathbb {R}^3\) be some domain of polyhedral type with faces \(\Gamma _j\), \(j=1,\ldots ,n\). For \(0<T<\infty \) put \(D_{T}=(0,T] \times D\) and \(\Gamma _{j,T}=[0,T]\times \Gamma _j\).
Parabolic problem with homogeneous boundary conditions. Let \(m\in \mathbb {N}\). We consider the following initial-boundary value problem,

Here f is a function given on \(D_T\), \(\nu \) denotes the exterior normal to \(\Gamma _j\), and the partial differential operator L is given by
where \(a_{\alpha \beta }\) are bounded real-valued functions from \(C^{\infty }(D_T)\) with \(a_{\alpha \beta }=a_{\beta \alpha }\). Furthermore, the operator L is assumed to be uniformly elliptic with respect to \(t\in [0,T]\), i.e.,
Let us denote by
the time-dependent bilinear form. In the sequel, w.l.o.g. we suppose that \(B(t,\cdot ,\cdot )\) satisfies
for all \(u\in \mathring{H}^m(D)\) and a.e. \(t\in [0,T]\). Moreover, we set
Finally, we explain what is meant by the weak solution of problem (\(P_{\text {hom}}\)).
Definition 2.18
Given \(f\in L_2([0,T],H^{-m}(D))\) a function u satisfying
is called a weak solution of problem (\(P_{\text {hom}}\)) if, and only if, \(u(0,\cdot )=0 \) in D and the equality
holds for all \(v\in \mathring{H}^m(D)\) and a.e. \(t\in [0,T]\).
It is also our intention to study inhomogeneous versions of (\(P_{\text {hom}}\)). Therefore, we modify (\(P_{\text {hom}}\)) as follows.
Parabolic problem with inhomogeneous boundary conditions. Let \(m\in \mathbb {N}\). We consider the following initial-boundary value problem,

where g and \(u_0\) are functions given on \(D_T\) and D, respectively, and f, L are as explained before for problem (\(P_{\text {hom}}\)). We wish to point out here that the condition on the coefficients \(a_{\alpha \beta }\) of L to be smooth is quite strong and can probably be weakened. This requires a careful check of the subsequent regularity results. However, the since presentation is already quite technical and not easy to read, we decided to merely focus on the (necessary) regularity assumptions regarding the right hand side f as well as the initial and boundary conditions \(u_0\) and g, respectively.
Remark 2.19
In analogy to Definition 2.18 we can define what is meant by a weak solution of the inhomogeneous problem (\(P_{\text {inhom}}\)) as follows. Let \({\tilde{f}}=f-\frac{\partial }{\partial t} g- L(t,x,\partial _x)g \). We say that u is a weak solution of (\(P_{\text {inhom}}\)) if for \({\tilde{f}}\in L_2([0,T],H^{-m}(D))\) and \(g\in H^1([0,T], H^m, (H^m)')\) the function \(u-g\) satisfies
with
and the equality
holds for all \(v\in \mathring{H}^m(D)\) and a.e. \(t\in [0,T]\). By our conditions (2.4.4) on \(u-g\), in view of (2.3.4) we see that \(u-g\in C([0,T], L_2(D))\), and thus the equality (2.4.5) makes sense.
2.5 Operator pencils
Following [26, Subsec. 4.1.6] and [28, Sec. 3.5] we now consider the operator pencils generated by the boundary value problem for elliptic equations (also with inhomogeneous boundary conditions for later use)
for \(j=1,\ldots ,n\) and \(k=1,\ldots ,m\), where \(D\subset \mathbb {R}^3\) is a domain of polyhedral type with faces \(\Gamma _j\). We assume that
is a uniformly elliptic differential operator of order 2m with smooth coefficients \(A_{\alpha }\).
Operator pencils
The boundary value problem (2.5.1) generates two types of operator pencils, \(A_{\xi }(\lambda )\) and \({\mathfrak {A}}_j(\lambda ) \), for the edge points and vertices of D, respectively.
1. Operator pencils \(A_{\xi }(\lambda )\) for edges: Let \(\xi \) be a point on an edge \(M_k\), and let \(\Gamma _{k_+},\, \Gamma _{k_-}\) be the faces of D adjacent to \(\xi \). Then by \({\mathcal {D}}_{\xi }\) we denote the dihedron which is bounded by the half-planes \(\mathring{\Gamma }_{k_{\pm }}\) tangent to \(\Gamma _{k_{\pm }}\) at \(\xi \) and the edge \(\mathring{M}_{\xi }= \overline{\mathring{\Gamma }}_{k_+}\cap \overline{\mathring{\Gamma }}_{k_-}\). Furthermore, let \(r,\varphi \) be polar coordinates in the plane perpendicular to \(\mathring{M}_{\xi } \) such that
Then we define the operator \(A_{\xi }(\lambda ) \) as follows:
where \(u(x) = r^{\lambda }U(\varphi )\) and
denotes the principal part of the differential operator \(L(x,\partial _x)\) with coefficients frozen at \(\xi \). The operator \(A_{\xi }(\lambda )\) realizes a continuous mapping
for every \(\lambda \in \mathbb {C}\), where \(I_{\xi }\) denotes the interval \((-\theta _{\xi }/2,+\theta _{\xi }/2)\). We denote by \(\delta _+(\xi )\) and \(\delta _-(\xi )\) the greatest positive real numbers such that the strip
is free of eigenvalues of the pencil \(A_{\xi }(\lambda )\). Furthermore, we define
for \(k=1,\ldots ,d\).
2. Operator pencils \({\mathfrak {A}}_i(\lambda )\) for vertices: Let \(x^{(i)}\) be a vertex of D, and let \(J_i\) be the set of all indices j such that \(x^{(i)}\in {\overline{\Gamma }}_j \). By our assumptions in Definition 2.1, there exist a neighborhood \({\mathcal {U}}\) of \(x^{(i)}\) and a diffeomorphism \(\kappa \) mapping \(D\cap {\mathcal {U}}\) onto \(K_i\cap B_1\) and \(\Gamma _k\cap {\mathcal {U}}\) onto \(\mathring{\Gamma }_k\cap B_1\) for \(k\in J_i\), where
is a cone with vertex at the origin, and \(\mathring{\Gamma }_k=\{ x:\, x/|x|\in \gamma _k \}\) are the faces of this cone. Without loss of generality, we may assume that the Jacobian matrix \(\kappa '(x)\) is equal to the identity matrix I at the point \(x^{(i)}\). We introduce spherical coordinates \(\rho =|x|,\, \omega = x/|x|\) in \(K_i\), and define
where \( u(x)=\rho ^{\lambda }U(\omega )\), \(U\in \mathring{H}^{m}(\Omega _i)\). The operator \({\mathfrak {A}}_i(\lambda )\) realizes a continuous mapping
for arbitrary \(\lambda \in \mathbb {C}\).
Remark 2.20
(Operator pencils for parabolic problems) Since we shall study parabolic PDEs, where the differential operator \(L(t, x,\partial _x)\) additionally depends on the time t, we have to work with operator pencils \(A_{\xi }(\lambda , t)\) and \({\mathfrak {A}}_i(\lambda , t)\) in this context. The philosophy is to fix \(t \in [0, T]\) and define the pencils as above: We replace (2.5.2) by
and work with \(\delta _{\pm }^{(\xi )}(t)\) and \(\delta _{\pm }^{(k)}(t)=\displaystyle \inf _{\xi \in M_k}\delta _{\pm }^{(\xi )}(t)\) in (2.5.3) and (2.5.4), respectively. Moreover, we put
Similar for \({\mathfrak {A}}_i(\lambda , t)\), where now (2.5.5) is replaced by
3 Regularity results for parabolic PDEs
In this section we study the regularity of parabolic partial differential equations in weighted Sobolev spaces and (Hölder-)Besov spaces on domains of polyhedral type. We extend the works of Maz’ya and Rossmann [26] (where only elliptic problems were considered), Luong and Loi [24] (whose results were established on polyhedral cones only), and Schneider [28] (where regularity in Kondratiev spaces was studied, which are contained in our scale of weighted Sobolev spaces).
To provide Besov regularity for the parabolic problem with inhomogeneous boundary conditions we first shall prove two Sobolev regularity theorems (without and with time derivatives) for the inhomogeneous problem based on the homogeneous case from [28]. Then we give regularity assertions in V-spaces for homogeneous and inhomogeneous problems for domains of polyhedral type D. Finally, we deduce Besov and Hölder–Besov regularity by applying the embedding \(V_{\varvec{\beta },\delta }^{l,2}(D)\cap H^s(D)\hookrightarrow B^r_{\tau ,\tau }(D)\) subject to some restrictions on the parameters.
3.1 Known auxiliary results
For our regularity assertions we rely on known results for elliptic equations when fixing the time parameter t. Therefore, we consider first the elliptic problem (2.5.1) (also with inhomogeneous boundary conditions for later use) and provide a lemma on the regularity of its solutions in domains of polyhedral type, which is a direct consequence of [26, Cor. 4.1.10, Thm. 4.1.11].
Lemma 3.1
Let \(D\subset \mathbb {R}^3\) be a domain of polyhedral type and \({\tilde{\gamma }}, \gamma '\ge m\). Moreover, let \(u\in V_{{\tilde{\varvec{\beta }}},{\tilde{\delta }}}^{{\tilde{\gamma }}}(D)\) be a solution of (2.5.1), where
for all \(j=1,\ldots ,n\) and \(k=1,\ldots ,m\). Suppose that the closed strip between the lines \(\text {Re}\, \lambda ={\tilde{\gamma }}-{\tilde{\beta }}_j-3/2\) and \(\text {Re}\, \lambda =\gamma '-\beta _j'-3/2\) is free of eigenvalues of the pencil \({\mathfrak {A}}_j(\lambda )\) for \(j=1,\ldots ,d'\) and that
for \(k=1,\ldots ,d\). Then \(u\in V_{\varvec{\beta }',\delta '}^{\gamma '}(D)\) and the following inequality holds
where C is a constant independent of u, f and \(g_{j,k}\).
Later on we rely also on the following lemma from [28, Lem. 5.2.1].
Lemma 3.2
(Continuity of bilinear form) Assume that \( F(t,\cdot ,\cdot ):\mathring{H}^m(D) \times \mathring{H}^m(D)\rightarrow \mathbb {R}\) is a bilinear map satisfying
for all \(t\in [0,T]\) and all \(u,v\in \mathring{H}^m(D) \), where C is a constant independent of \(u,\,v\), and t. Assume further that \(F(\cdot , u, v)\) is measurable on [0, T] for each pair \(u, v \in \mathring{H}^m(D)\). Assume that \(u\in H^1([0,T], \mathring{H}^m, H^{-m})\) satisfies \(u(0)\equiv 0\) and
for a.e. \(t \in [0, T]\) and all \(v \in \mathring{H}^m(D)\). Then \(u\equiv 0\) on \([0,T]\times D\).
We recall [28, Thm. 5.2.2], which guarantees the existence (and uniqueness) of the weak solution of the homogeneous problem (\(P_{\text {hom}}\)) and provides Sobolev regularity without time derivatives for it.
Theorem 3.3
(Sobolev regularity without time derivatives for homogeneous problem) Let \(f\in L_2([0,T],H^{-m}(D))\). Then problem (\(P_{\text {hom}}\)) has a unique weak solution u in the space \(H^1([0,T], \mathring{H}^m, H^{-m})\) and the following estimate holds
where C is a constant independent of u and f.
The above theorem can be strengthened as follows to include Sobolev regularity results for the time derivatives as well, cf. [28, Thm. 5.2.3].
Theorem 3.4
(Sobolev regularity with time derivatives for homogeneous problem) Let \(l\in \mathbb {N}_0\) and assume that the right hand side f of problem (\(P_{\text {hom}}\)) satisfies
Then the weak solution u in the space \(H^1([0,T], \mathring{H}^m, H^{-m})\) of problem (\(P_{\text {hom}}\)) has derivatives with respect to t up to order l satisfying
and
where C is a constant independent of u and f.
3.2 Regularity results in Sobolev spaces for the inhomogeneous problem
In this section we generalize Theorems 3.3 and 3.4 to the inhomogeneous setting. Our main strategy for proving our regularity results in Sobolev spaces with inhomogeneous boundary conditions will be to reduce the inhomogeneous problem to a similar one with homogeneous boundary conditions. We briefly illustrate the concept for elliptic PDEs.
Consider the problem
where \(g\in H^m(D)\) is the inhomogeneous boundary condition and L an elliptic differential operator of the form (2.4.1) (independent of the time parameter t). Using the variational formulation, a weak solution of (3.2.1) is a function \(u\in H^m(D)\) such that \(u-g\in \mathring{H}^m(D)\), i.e., \(u=g\) on \(\partial D\) in the trace sense, satisfying
for all \(\varphi \in \mathring{H}^m(D)\). This can be rewritten in terms of \(w:=u-g\). Then the corresponding (homogeneous) problem is to find \(w\in \mathring{H}^m(D)\) such that
Therefore, instead of solving (3.2.2) we solve (3.2.3) in order to obtain a weak solution for (3.2.1). For parabolic PDEs this works in a similar (slightly more technical) manner.
Using the above described strategy we start with generalizing Theorem 3.3 to the inhomogeneous setting. The proof follows closely [28, Thm. 5.2.2] and [16, Sect. 7.1.2] subject to suitable modifications.
Theorem 3.5
(Sobolev regularity without time derivatives for inhomogeneous problem) Let D be a bounded Lipschitz domain of polyhedral type. Moreover, assume \(f\in L_2([0,T],H^{-m}(D))\) and let the initial-boundary conditions satisfy \(g\in H^1([0,T], H^m, (H^m)')\) and \(u_0\in L_2(D)\).
Then problem (\(P_{\text {inhom}}\)) has a unique weak solution u in \(H^1([0,T], {H}^m, H^{-m})\) and the following estimate holds
where C is a constant independent of \(f,\,g,\,u_0\), and u.
Remark 3.6
The restriction of the boundary data g at time \(t=0\) makes sense: By our assumptions \(g(0,\cdot )\in L_2(D)\) is well-defined, since by (2.3.2) we have
Proof
First we show the uniqueness of the solution. Let \(u_1,\, u_2\in H^1([0,T], {H}^m, H^{-m})\) be two weak solutions of (\(P_{\text {inhom}}\)). Then \(w_1=u_1-g,\,w_2=u_2-g\in H^1([0,T], \mathring{H}^m, H^{-m})\) are two weak solutions of the following homogeneous problem
with the new right hand side \(F\in L_2([0,T],H^{-m}(D))\). In this case we have for \(i=1,2\) that
where \(B(t,w,\varphi )=\displaystyle \int _{D} L w(t,x)\varphi (x) \, dx \) and \(\langle F, \varphi \rangle =\langle f,\varphi \rangle -\langle \partial _t g,\varphi \rangle -B(t,g,\varphi ) \). Subtraction yields
Applying Lemma 3.2 to \(w_1-w_2\) with the bilinear form \(F\equiv 0\) on \(\mathring{H}^m(D)\times \mathring{H}^m(D)\), gives \(w_1-w_2\equiv 0\) on \(D_T\). Therefore,
which proves the uniqueness of the solution of problem (\(P_{\text {inhom}}\)).
Now we turn towards proving the existence of a solution. By the assumption \(a_{\alpha \beta }=a_{\beta \alpha }\) for \(|\alpha |,|\beta |\le m\), L is formally a self-adjoint operator. Moreover, the Rellich–Kondrachov Theorem tells us that the embedding \(\mathring{H}^m(D)\hookrightarrow L_2(D)\) is compact (in particular, this holds for bounded Lipschitz domains and therefore also for bounded Lipschitz domains of polyhedral type).
From this we deduce that the operator \(L(0,x,\partial _x)\) possesses a set \(\{\psi _k\}_{k=1}^{\infty }\) consisting of all its eigenfunctions, which is not only an orthogonal basis of \(\mathring{H}^m(D)\) but also an orthonormal basis of \(L_2(D)\). We refer to [15, Thm. 8.39] in this context (with \(X=\mathring{H}^m, \, Y=L_2\); the fact that the embedding \(\mathring{H}^m(D)\hookrightarrow L_2(D)\) is compact is crucial here). We now want to approximate w, the solution of problem (3.2.6). For each positive integer N consider the function
where \(\left\{ C_k^N(t)\right\} _{k=1}^N\) is the solution of the ordinary differential equation system
for \(k=1,\ldots , N\). After multiplying both sides of (3.2.8) by \(C_k^N(t)\), taking the sum with respect to k from 1 to N, and integrating with respect to t from 0 to T (\(T>0\)), we arrive at
From this we deduce
where we applied [32, Chap. III, Lem. 1.2] for the first term, since \(w^N\in L_2([0,T],\mathring{H}^m(D)) \) and \(\partial _t w^N \in L_2([0,T],H^{-m}(D))\).
The equality (3.2.10) yields
Applying Young’s inequality, i.e., \(ab\le \frac{1}{2}\left( \varepsilon a^2+\frac{b^2}{\varepsilon } \right) \), we can estimate term I by
For term II we similarly obtain that
Applying Hölder’s and again Young’s inequality, we estimate for term III
since \(B(t,g,w^N)\) consists of the derivatives of \(g,\, w^N\in H^m(D)\) of order less or equal m and the coefficients \(a_{\alpha ,\beta }\) of L (and their derivatives) are smooth and therefore bounded in D.
Using the coercivity of the bilinear form B, cf. (2.4.2), on the left-hand side in (3.2.11) we estimate
Therefore, choosing \(0< 3\varepsilon <2\mu \) we get from (3.2.11)–(3.2.15) that
We now estimate term IV as follows: Put
Then (3.2.10) and similar estimates as in (3.2.12)–(3.2.16) (this time without integration over t) show that
for a.e. \(0\le t\le T\), where we used that \(B(t,w^N,w^N)\) in (3.2.10) is non-negative due to (2.4.2). For the functions \(\eta \) and \(\xi \) we now can apply the differential form of Gronwall’s inequality, cf. [16, App. B.2], which yields the estimate
We now estimate the term \(\eta (0)\) using the definition of \(w^N\) and the fact that \(\{\psi _k\}_{k=1}^{\infty }\) is an orthonormal basis in \(L_2(D)\) and obtain
Then we obtain from (3.2.17) the estimate
This inserted in (3.2.16) yields
Now fix any \(v\in \mathring{H}^m(D)\) with \(\Vert v|H^m(D)\Vert \le 1\), and write \(v=v_1+v_2\), where \(v_1\in \textrm{span}(\psi _1,\ldots , \psi _N)\) and \((v_2,\psi _l)_{L_2(D)}=0\), for \(l=1,\ldots , N\). Since the functions \(\left\{ \psi _l\right\} _{l=1}^N\) are orthogonal in \(\mathring{H}^m(D)\), \(\Vert v_1|{H}^m(D)\Vert \le \Vert v|{H}^m(D)\Vert \le 1\). We obtain from (3.2.8) that
Therefore,
Since \(\Vert v_1|{H}^m(D)\Vert \le 1\), we see that
thus,
Integration over t together with (3.2.18) yields
where in the last step we used the embedding \(H^1([0,T], H^m, (H^m)')\hookrightarrow C([0,T],L_2(D))\) for the term \(\Vert g(0,\cdot )|L_2(D)\Vert ^2\). Now using (3.2.18), (3.2.19) and the triangle inequality we get for \(u^N=w^N+g\) that
where in the second step we use the fact that \(H^1([0,T], H^m, (H^m)')\hookrightarrow H^1([0,T], {H}^m, H^{-m})\) since \((H^m(D))'\hookrightarrow H^{-m}(D)\). Moreover, the appearing constant is independent of \(f,\,g,\, u_0\) and N.
We see that \(\{u^N\}_{N=1}^{\infty }\) is a uniformly bounded sequence in the reflexive space \( H^1([0,T], {H}^m, H^{-m})\), thus, by the same arguments as in [16, Ch. 7, Thm. 3] we conclude that there exists a subsequence \(\{u^{N_l}\}_{l=1}^{\infty }\) of \(\{u^N\}_{N=1}^{\infty }\) which weakly converges to a weak solution \(u\in H^1([0,T], {H}^m, H^{-m})\) of problem (\(P_{\text {inhom}}\)). In particular, this solution satisfies
and satisfies the initial-boundary conditions
using \(w=u-g\), (3.2.5) and the construction from (3.2.7), (3.2.9). This completes the proof. \(\square \)
To prove the generalization of Theorem 3.4 to the inhomogeneous setting we will need the following auxiliary lemma whose proof is based on [4, Lem. 4.3] with suitable modifications for our needs and which is related to the following problem:

Problem (\(P_3\)) has the advantage that it is easier to handle since now homogeneous boundary conditions appear.
Lemma 3.7
(Sobolev regularity with first time derivatives) Let D be a bounded Lipschitz domain of polyhedral type. Moreover, assume
and
Then problem (\(P_3\)) has a unique weak solution w in \(H^1([0,T], {H}^m, L_2):=L_2([0,T],H^{m}(D))\cap H^1([0,T], L_2(D))\) and the following estimate holds
where C is a constant independent of \(f,\,\varphi _0\) and w.
Remark 3.8
Later on we shall apply Lemma 3.7 to \(\varphi _0:= u_0-g(0,\cdot )\in \mathring{H}^m(D)\) in order to relate problem (\(P_3\)) with our inhomogeneous problem (\(P_{\text {inhom}}\)). Thus, for the function \(u_0\) we require \(u_0\in {H}^m(D)\) and for g we require that it is smooth enough such that
This is satisfied if
cf. Lemma 2.17 concerning the embedding. Furthermore, in this case we have the estimate
Proof
Step 1: Let us consider first the case \(f \in L_2(D_T)\). We use the same construction as in (3.2.7) but now for each positive integer N consider the function
where \(\left\{ C_k^N(t)\right\} _{k=1}^N\) is the solution of the ordinary differential equation system
for \(k=1,\ldots , N\). Here the pairing \((\cdot , \cdot )_{\mathring{H}^m(D)}\) denotes the inner product in \(\mathring{H}^m(D)\). Multiplying both sides of (3.2.22) by \(2\frac{dC_k^N}{dt}\), then taking the sum with respect to k from 1 to N, and afterwards integrating with respect to t from 0 to T, we arrive at
Here we used that \(\langle f,\partial _t w^N \rangle =( f,\partial _t w^N )_{L_2(D)}\) for \(f(t,\cdot ) \in L_2(D)\subset H^{-m}(D)\) and \(\partial _t w^N(t,\cdot ) \in \mathring{H}^m (D)\). Using integration by parts with respect to t we obtain
Since \(a_{\alpha \beta }, \frac{\partial a_{\alpha \beta }}{\partial _t} \) are bounded on \(D_T\), from (3.2.21), (3.2.23), Cauchy’s and Young’s inequalities we obtain
Furthermore, we use the estimate (3.2.18) replacing \(u_0-g(0,\cdot )\) by \(\varphi _0\) and g by the zero function and obtain
In view of (3.2.24), (3.2.27), (3.2.28), and (2.4.2) we deduce
Combining (3.2.28) and (3.2.29) we obtain
where \(C'\) is a constant independent of \(N,\, f\), and \(\varphi _0\). Hence, we see that \(\{w^N\}_{N=1}^{\infty }\) is a uniformly bounded sequence in the reflexive space \(H^1([0,T], {H}^m, L_2) \). Thus, by the same arguments as in [16, Ch. 7, Thm. 3] we conclude that there exists a subsequence \(\{w^{N_l}\}_{l=1}^{\infty }\) of \(\{w^N\}_{N=1}^{\infty }\) which weakly converges to a weak solution \(w\in H^1([0,T], {H}^m, L_2)\) of problem (\(P_3\)). In particular, this solution satisfies
which proves the lemma for \(X=L_2(D_T)\).
Step 2: Now let \(f\in H^1([0,T],H^{-m}(D))\). Applying [16, Sec. 5.9, Thm. 2, (iii)] to the complete normed vector space \(X=H^{-m}(D)\) we obtain
where the constant C depends only on T.
Similarly to (3.2.24) we obtain
Noting that \(\int _0^T\langle f,\partial _t w^N \rangle \, dt=- \int _0^T\langle \partial _t f, w^N \rangle \, dt+ \langle f, w^N \rangle |_0^T\), using (3.2.30) and Young’s inequality twice we calculate
Combining (3.2.25), (3.2.26), (3.2.28), (3.2.32) together with the coercivity of the bilinear form B, cf. (2.4.2), for \(0<\varepsilon ', {\varepsilon } <\mu \) we obtain from (3.2.31) that
Finally, combining (3.2.28) and (3.2.33) yields
By the same argument as in Step 1 above, we conclude the existence of a convergent subsequence of \(\{w^N\}_{N=1}^{\infty }\) to a function \(w\in H^1([0,T], {H}^m, L_2)\) and obtain the assertion of the lemma for the case \(f\in H^1([0,T],H^{-m}(D))\). \(\square \)
Remark 3.9
For later use we remark that if \(\varphi \in \mathring{H}^{m}(D)\) and \(f=f_1+f_2\) with \(f_1\in H^1([0,T],H^{-m}(D))\), \(f_2\in L_2(D_T) \), then one can decompose problem (\(P_3\)) into two parts
and
where \(c\in \mathbb {R},\, 0\le c\le 1\).
Then if \(w_1,\,w_2\) are the solutions of (3.2.34) and (3.2.35), respectively, we deduce from Lemma 3.7 that \(w=w_1+w_2\) is the solution of (\(P_3\)) and the following inequality holds
We now generalize Theorem 3.4 to inhomogeneous boundary conditions. We rely on the proof of the homogeneous case from [28, Thm. 5.2.3] and [4, Thm. 3.1] with suitable modifications. First we have to introduce the so called compatibility conditions appearing in [4, Sec. 3] modified according to our needs:
Definition 3.10
(Compatibility conditions) Using the notations from problem (\(P_{\text {inhom}}\)) we define
and
where
We say that the l-th-order compatibility conditions are fulfilled if \(\partial _{t^k}F\in L_2([0,T],{H}^{(l-k)2m}(D))\) for \(k=0,\ldots , l\), and additionally, it holds that \(\varphi \in \mathring{H}^{(2\,l+1)m}(D)\),
Remark 3.11
Note that such compatibility conditions are not needed in Theorem 3.5 since this would simply correspond to require that \(u_0 -g(0,\cdot )=0\) on \(\partial D\) (no further conditions in terms of derivatives w.r.t. time are needed). However, since \(g(0,\cdot )\) and \(u_0\) by the assumptions belong to \(L_2(D)\) (and are therefore not defined pointwise) such a condition is not necessary (does not make sense) in this context.
With these compatibility conditions we are now able to generalize Theorem 3.4 for the inhomogeneous problem (\(P_{\text {inhom}}\)) as follows.
Theorem 3.12
(Sobolev regularity with time derivatives for inhomogeneous problem) Let D be a bounded Lipschitz domain of polyhedral type. Moreover, let \(l\in \mathbb {N}_0\) and assume that the right hand side f of problem (\(P_{\text {inhom}}\)) satisfies
For g we assume
Moreover, let \(u_0\in {H}^{(2l+1)m}(D)\) and the l-th order compatibility conditions be satisfied. Then the weak solution \(u\in H^1([0,T], {H}^m, L_2)\) of Problem (\(P_{\text {inhom}}\)) has derivatives with respect to t up to order l satisfying
Moreover, we have the estimate
where C is a constant independent of \(f,\,g,\,u_0\), and u.
Proof
We define the function \(w:=u-g\) and consider the following equivalent problem to problem (\(P_{\text {inhom}}\)):
In particular, problem (3.2.38) has the advantage that it is easier to handle compared to problem (\(P_{\text {inhom}}\)), since now homogeneous boundary conditions appear. In what follows, we will show the theorem by induction on l and additionally prove that the following equalities hold:
and
for all \( \eta \in \mathring{H}^m(D)\). The case \(l=0\) follows directly from Lemma 3.7 (and Theorem 3.5) which for \(F\in L_2(D_T)\) and \(\varphi _0=u_0-g(0,\cdot )\in \mathring{H}^m(D)\) gives the estimate
In particular, \(F\in L_2(D_T)\) follows from \(f\in L_2(D_T)\) and the fact that the assumptions on g imply \(\partial _t g\in L_2([0,T],L_2(D))\) and \(Lg\in L_2([0,T],L_2(D))\).
Therefore, we obtain
which inserted in (3.2.40) and using the embedding (3.2.20) gives
This proves the claim for \(l=0\). Assuming that the assumptions hold for \(l-1\), i.e.,
together with
and \(\ \partial _{t^k}w(0,\cdot )=\varphi _k,\quad k=0,...,l-1,\)
we will prove them for l (\(l\ge 1\)). We consider first the following problem: find a function \(v\in {H^1([0,T], \mathring{H}^m, H^{-m})}\) satisfying \(v(0,\cdot )=\varphi _l\) and
for all \(\eta \in \mathring{H}^m(D)\) and a.e. \(t\in [0,T]\). (Note that the idea here is that by construction we want \(v=\partial _{t^l}w=\partial _{t^l}(u-g)\).) We show that the functional \({\widetilde{F}}(t)\), \(t\in [0,T]\) on the right hand side of belongs to \({\widetilde{F}}\in L_2([0,T], H^{-m}(D))\): From the inductive hypothesis, the fact that
together with \((H^m(D))'\hookrightarrow H^{-m}(D)\) and (2.4.3), we see that
where \(C'\) is a constant independent of \(f,\, g,\, u_0\), and u.
Hence, according to Theorem 3.5 the problem (3.2.41) has a solution \(v\in {H^1([0,T],} {{\mathring{H}^m}, H^{-m})}\) with
where C is a constant independent of \(f,\, g,\, u_0\) and u.
We put now
Then we have \(\gamma (0,\cdot )=\varphi _{l-1}\), \(\partial _t \gamma =v\), \(\partial _t \gamma (0,\cdot )=v(0,\cdot )=\varphi _l\). Note that
and
Using (3.2.42) and (3.2.43) we rewrite (3.2.41) as follows
Since \(L_{t^{k}}=\displaystyle \sum _{|\alpha |,|\beta |=0}^m {(-1)^{|\alpha |}}\partial _x^{\alpha }(\partial _{t^{k}} a_{\alpha \beta } \partial _x^{\beta } ) \) we deduce from (2.4.3) that
for all \(\omega \in \mathring{H}^{2m}(D)\), \(\eta \in \mathring{H}^m(D)\), and all \(t\in [0,T]\). From the compatibility conditions and (3.2.45) we see that
Using (3.2.46), the fact that \(\gamma (0,\cdot )=\varphi _{l-1}\), \(\partial _t\gamma (0,\cdot )=\varphi _{l}\), \(\partial _{t^k}w(0,\cdot )=\varphi _k\) for \(k=0,...,l-1,\) and integrating (3.2.44) with respect to t from 0 to t we obtain
where most of the ‘boundary terms’ corresponding to \(t=0\) after integration cancel out. Put \(z=\gamma -\partial _{t^{l-1}}w\). Then \(z(0,\cdot )=0\) since \(\partial _{t^{l-1}}w(0,\cdot )=\gamma (0,\cdot )=\varphi _{l-1}\). It follows from the inductive assumption (3.2.39) with l replaced by \(l-1\) and (3.2.47) that
for all \(\eta \in \mathring{H}^m(D)\).
Moreover, \(z\in H^1([0,T], \mathring{H}^m, H^{-m}) \), since \(v=\partial _t \gamma \in H^1([0,T], \mathring{H}^m, H^{-m})\) and \(\partial _{t^{l-1}}w=\partial _{t^{l-1}}(u-g)\in H^1([0,T], \mathring{H}^m, L_2):=L_2([0,T],\mathring{H}^m(D))\cap H^1([0,T],L_2(D))\hookrightarrow H^1([0,T], \mathring{H}^m, H^{-m}) \) according to the induction assumption on u and the conditions on g.
Now applying Lemma 3.2, we can see from (3.2.48) that \(z\equiv 0\) on \([0,T]\times D\). This implies \(\partial _{t^l}(u-g)=\partial _{t^l}w=\partial _t \gamma =v\in {H^1([0,T], \mathring{H}^m, H^{-m})} \), and hence, \(\partial _{t^l}u\in {H^1([0,T], H^m, {H^{-m}})}\), since according to our assumptions \(\partial _{t^l}g\in {H^1([0,T], H^m, (H^m)')}\). It remains to show that in fact we actually have \(\partial _{t^l}u\in H^1([0,T], {H}^m, L_2)\). For this we rewrite (3.2.41) as
where \({\widehat{F}}_1(t)\), \({\widehat{F}}_2(t)\), \(t\in [0,T]\) are the functionals defined by
Since \(\partial _{t^{l+1}}g\in L_2(D_T)\) and \(\partial _{t^l}f\in L_2(D_T)\) we see immediately that \({\widehat{F}}_1\) in fact belongs to \(L_2(D_T)\). Moreover, we see from (3.2.49) that \({\widehat{F}}_2\) belongs to \(H^1([0,T],H^{-m}(D))\): We deduce \({\widehat{F}}_2, \ \partial _t {\widehat{F}}_2\in L_2([0,T], H^{-m}(D))\), from (3.2.49) and
using the regularity assumptions \(\partial _{t^{l}}g\in L_2([0,T],H^{2m+m}(D))\), \(\partial _{t^{l+1}}g\in L_2([0,T],H^{m}(D))\), and \(\partial _{t^k}u\in L_2([0,T], H^{m}(D))\) for all \(k=0,\ldots , l\).
Thus, from Remark 3.9 after Lemma 3.7 we conclude \(v=\partial _{t^l}(u-g)\in H^1([0,T], {H}^m, L_2)\), which implies \(\partial _{t^l}u\in H^1([0,T], {H}^m, L_2)\). The desired estimate (3.2.37) holds since \(\Vert {\widehat{F}}_1|L_2(D_T)\Vert \), \(\Vert {\widehat{F}}_2|H^1([0,T],H^{-m}(D))\Vert \) and \( \Vert \varphi _l|H^m(D)\Vert \) can be estimated by the right hand side of (3.2.37). This finally completes the proof. \(\square \)
Remark 3.13
Note that the regularity conditions (3.2.36) on g in Theorem 3.12 are necessary since we require \(\partial _{t^{l+1}}g\in L_2([0,T],H^{m}(D))\) in (3.2.50).
3.3 Regularity results in weighted Sobolev spaces
In this subsection we provide regularity assertions for the weak solution of problems (\(P_{\text {hom}}\)) and (\(P_{\text {inhom}}\)) in the spaces \(V_{\varvec{\beta },\delta }^{l,p}(D) \). Forerunners for the homogeneous case can be found in [24, Thm. 3.3], where the underlying domain is a polyhedral cone, and in [28, Thms. 5.2.9, 5.2.12], where corresponding regularity results are proven on domains of polyhedral type in the scale of Kondratiev spaces (which is contained in the scale of V-spaces). We now want to generalize these results to the more general spaces \(V_{\varvec{\beta },\delta }^{l,p}(D) \) where the underlying domain is of polyhedral type for both, the homogeneous and the inhomogeneous setting.
3.3.1 Weighted Sobolev regularity for the homogeneous problem
We first investigate the regularity in weighted Sobolev spaces for the parabolic problem (\(P_{\text {hom}}\)) on domains of polyhedral type.
Theorem 3.14
(\(A_{\text {hom}}\): Regularity in V-spaces of homogeneous problem) Let \(D\subset \mathbb {R}^3\) be a bounded Lipschitz domain of polyhedral type with edges \(M_1,\ldots ,M_d\) and vertices \(x^{(1)},\ldots ,x^{(d')} \). Let \(\gamma \in \mathbb {N} \) with \(\gamma \ge 2m\) and put \(\gamma _m:=\left[ \frac{\gamma -1}{2m}\right] \). Furthermore, let \( \delta \in \mathbb {R}^d\), \(\varvec{\beta }\in \mathbb {R}^{d'}\) with \({\delta _k\in [-m,m]}\) for \(k=1,\ldots ,d\) and \(\beta _j\in [-m,m] \) for \(j=1,\ldots ,d'\). Assume that the right hand side f of problem (\(P_{\text {hom}}\)) satisfies
-
(i)
\(\partial _{t^k} f\in L_2(D_T)\cap L_2([0,T], V_{\varvec{\beta },\delta }^{2m(\gamma _m-k)}(D) )\), \(k=0,\ldots , \gamma _m\), and \(\partial _{t^{\gamma _m+1}} f\in L_2(D_T)\),
-
(ii)
\(\partial _{t^k} f(0,x)=0\), \(k=0,\ldots , {\gamma _m}.\)
Moreover, suppose that the closed strip between the lines \(\text {Re}\, \lambda =m-3/2\) and \(\text {Re}\, \lambda = 2m(\gamma _m-i)-\beta _j+2m-3/2\) is free of eigenvalues of the pencil \({\mathfrak {A}}_j(\lambda )\) for \(j=1,\ldots ,d',\, i=0,\ldots ,\gamma _m\) and that
for \(k=1,\ldots ,d\) and \(i=0,\ldots ,\gamma _m\). Then for the weak solution \(u\in H^1([0,T], \mathring{H}^m, H^{-m}) \) (with time-derivatives \(\partial _{t^k}u\in H^1([0,T], \mathring{H}^m, H^{-m}) \text { for } k=1,\ldots ,\gamma _{m}+1 \)) of problem (\(P_{\text {hom}}\)) we have
for \(l=-1,0,\ldots , \gamma _m\). In particular, for the derivatives \(\partial _{t^{l+1}} u\) up to order \(\gamma _m+1\) we have the a priori estimate
where the constant is independent of u and f.
Remark 3.15
The existence of the solution \(u\in H^1([0,T], \mathring{H}^m, H^{-m}) \) with derivatives \(\partial _{t^k}u\in H^1([0,T], \mathring{H}^m, H^{-m}) \,\text {for}\, k=1,\ldots ,\gamma _{m}+1 \) in Theorem 3.14 follows from Theorems 3.3 and 3.4 with \(l=\gamma _m+1\).
Proof
We prove the theorem by induction. In particular, we first show the claim for the induction basis \(\gamma =2m\). Then we proceed with the induction step from \(\gamma -1\) to \(\gamma \) with \(l=\gamma _m\), and finally, we make a backwards induction from \(l=\gamma _m,\gamma _m-1,\ldots ,i\) to \(l=i-1\) with arbitrary \(\gamma \).
Let \(\gamma =2m\), then we have \(\gamma _m=0\). Since by our assumptions \(f, \partial _t f\in L_2(D_T)\hookrightarrow L_2([0,T],H^{-m}(D))\) it follows from Theorem 3.4 that \(\partial _t u(t)\in \mathring{H}^m(D)\). Furthermore, according to [26, p. 143, and Lem. 3.1.6] and Lemma 2.5 one obtains that \(\mathring{H}^m(D)\subset V_{0,0}^m(D)\subset V_{\varvec{\beta },\delta }^0(D)\) if \(-m\le \beta _j\) for all \(j=1,\ldots ,d'\) and \(-m\le \delta _k\) for all \(k=1,\ldots ,d\). In this case Theorem 3.4 gives the estimate
Moreover, we have
where for fixed t the right hand side belongs to \(V_{\varvec{\beta },\delta }^0(D)\) and according to (2.1.4) also to \( V_{0,0}^{-m}(D)\) if \(\beta _j\le m,\, j=1,\ldots ,d'\) and \(\delta _k\le m,\, k=1,\ldots ,d\). Thus, an application of Lemma 3.1 (with \({\tilde{\gamma }}=m\), \({\tilde{\delta }}_k=0\), \(k=1,\ldots ,d\), \(\tilde{\beta _j}=0\), \(j=1,\ldots ,d'\), \(\gamma '=2m\), \(\varvec{\beta }'=\varvec{\beta }\), \(\delta '=\delta \)) gives \(u(t)\in V_{\varvec{\beta },\delta }^{2m}(D)\) with the a priori estimate
Now integration w.r.t. the parameter t together with (3.3.2) proves the claim for \(\gamma =2m\), i.e.,
Assume inductively that our assumption holds for \(\gamma -1\). This means, in particular, that we have the following a priori estimate
We are going to show that the claim then holds for \(\gamma \) as well. If \(l=\gamma _m\) by our assumptions on f we have \(\partial _{t^{k}} f\in L_2(D_T)\hookrightarrow L_2([0,T],H^{-m}(D))\) for \(k=0,\ldots , \gamma _m+1\), and by Theorem 3.4 together with (2.1.4) and \(\mathring{H}^m(D)=\mathring{V}_{0,0}^m(D)\), cf. [26, p. 143], we have
where \(j=1,\ldots ,d'\) and \(k=1,\ldots ,d\). In particular, Theorem 3.4 provides us with the a priori estimate
which shows the claim for \(l=\gamma _m\) and arbitrary \(\gamma \). Hence, the claim holds for \(l=\gamma _m\). We now proceed by backwards induction. Suppose now the result holds for \(\gamma \) and \(l=\gamma _m, \gamma _m-1, \ldots , i\) where \(0\le i\le \gamma _m\). We show that it then also holds for \(i-1\). Differentiating (\(P_{\text {hom}}\)) i-times gives
where \(\partial _{t^{i-k}}L= \sum _{|\alpha |,|\beta |=0}^m (-1)^{|\alpha |}\partial _x^{\alpha }(\partial _{t^{i-k}} a_{\alpha \beta } \partial _x^{\beta } ) \). From our initial assumptions on f we see that \(\partial _{t^i}f(t)\in V^{2m(\gamma _m-i)}_{\varvec{\beta },\delta }(D)\) and from the inductive assumptions it follows that \(\partial _{t^{i+1}}u(t)\in V^{2m(\gamma _m-i)}_{\varvec{\beta },\delta }(D)\) and
where we used Lemma 2.5 and the fact that \((\gamma -1)_m-(k-1)\ge \gamma _m-i+1\) for \(k=0,\ldots , i-1\). The differential operator \(\partial _{t^{i-k}} L\) diminishes the space regularity by 2m since its coefficients \(a_{\alpha \beta }\) are smooth functions. Thus, from (3.3.5) we see that
hence, the right hand side of (3.3.4) belongs to \( L_2([0,T],V^{2m(\gamma _m-i)}_{\varvec{\beta },\delta }(D))\) and by (2.1.4) also to \( L_2([0,T],V^{-m}_{0,0}(D))\) since \(\beta _j\le m\), \(\delta _k\le m\) for \(j=1,\ldots ,d'\) and \(k=1,\ldots ,d\). An application of Lemma 3.1 (now with \(\gamma '=2m(\gamma _m-(i-1))\), \(\varvec{\beta }'=\varvec{\beta }\), \( \delta '=\delta \) and again taking \({\tilde{\gamma }}=m\), \({\tilde{\beta }}_j=0\) for \(j=1,\ldots ,d'\) and \({\tilde{\delta }}_k=0\) for \(k=1,\ldots ,d\)) yields
Moreover, we have the a priori estimate
where we used (3.3.5) in the last step. Integration w.r.t. the parameter t together with the inductive assumptions on \(\partial _{t^{i+1}}u\) and \(\partial _{t^k} u\) (cf. (3.3.3)) gives the a priori estimate
where in the last step we used the fact that \((\gamma -1)_m\le \gamma _m\). This shows that the claim is true for \(i-1\) and completes the proof. \(\square \)
Remark 3.16
(Restrictions on the parameter \(\delta \)) We discuss the restrictions on the parameter \(\delta =(\delta _1,\ldots , \delta _d)\) appearing in Theorem 3.14. For simplicity, let the domain of polyhedral type D be a polyhedron with straight edges and faces where \(\theta _k\) denotes the angle at the edge \(M_k\). Then we require for \(\delta _k,\, k=1,\ldots ,d\) that
We consider the case of the heat equation when \(m=1\) and \(\delta _{\pm }^{(k)}=\frac{\pi }{\theta _k}\), cf. [22, Subsect. 2.1.1] or [24, Sect. 4]. For general angles \(\theta _k\) we obtain the restrictions
which are satisfied if
To guarantee that such \(\delta _k\)’s exist we require
which shows that the greater the angle \(\theta _k\), the smaller \(\gamma _1\) (and thus \(\gamma \)) has to be in order to satisfy the assumptions. In particular, for the extremal case \(\theta _k=2\pi \) we require \(\gamma _1=0\) (i.e., \(\gamma =2\) and \(\frac{1}{2}<\delta _k\le 1\)) whereas for \(\theta _k=\frac{\pi }{4}\) we obtain \(\gamma _1<2\) (i.e., \(\gamma <4\) with \(-1<\delta _k\le 1\) for \(\gamma =3\)). Moreover, if \(\gamma _1=0\) in (3.3.6) then \(\max \big ( 2(\gamma _1-i)-\frac{\pi }{\theta _k}+1,-1 \big )=\max \big (1-\frac{\pi }{\theta _k},-1\big ) \). In this case it is always possible to find suitable \(\delta _k\)’s, since \(1- \frac{\pi }{\theta _k}<1\) is always satisfied. If \(\gamma _1=1\) (and \(i=0\)) then \(\max \big ( 2(\gamma _1-i)-\frac{\pi }{\theta _k}+1,-1 \big )=\max \big (3-\frac{\pi }{\theta _k},-1\big ) \). In this case we require that
Thus, in this case we can find suitable \(\delta _k\)’s only for not too great angles, in particular, only for angles smaller than \( \frac{\pi }{2}.\)
Furthermore, if we have a non-convex angle \(\theta _k>\pi \) then only \(\gamma _1=0\) is allowed, and hence, \(\gamma =2\) is required with \( \max \big (1-\frac{\pi }{\theta _k},-1\big )=1-\frac{\pi }{\theta _k}<\delta _k\le 1\). In this case it is possible to find suitable \(\delta _k\)’s but they cannot be negative since \(1-\frac{\pi }{\theta _k}>0\).
From the above discussion we see that the shape of the domain limits strongly the regularity of the solutions even for smooth data.
In general, we see that the largest angle of the edges determines the maximal (possible) range for the smoothness \(\gamma \), which can be considered. For every vertex \(x_j\), \(j=1,\ldots , d'\), we can use that the truncation near the vertex is a polyhedral cone, and hence, for the edges at this vertex we can use the formula \(\theta _{j_1}+\cdots +\theta _{j_l}=(l-2)\pi \). For fixed l the maximum of the angles is the smallest in the case of a polyhedron having the same angles, i.e., \(\theta =\theta _{j_i}=\frac{l-2}{l}\pi \), \(i=1,\ldots , l\). We see that the greater l is, the greater is also \(\theta \). Therefore, the ’best’ case (when one wishes to consider large values of \(\gamma \)) is the tetrahedron with angles \(\theta =\frac{\pi }{3}\).
We now present our second result concerning weighted Sobolev regularity for the parabolic problem (\(P_{\text {hom}}\)) on domains of polyhedral type, where the right–hand side f now is arbitrarily smooth with respect to time.
Theorem 3.17
(\(B_{\text {hom}}\): Regularity in V-spaces of homogeneous problem) Let \(D\subset \mathbb {R}^3\) be a bounded Lipschitz domain of polyhedral type with edges \(M_1,\ldots ,M_d\) and vertices \(x^{(1)},\ldots ,x^{(d')} \) and let \(\eta \in \mathbb {N} \) with \(\eta \ge 2m\). Moreover, let \(\delta \in \mathbb {R}^d\) with \(\delta _k\in [-m,m],\, k=1,\ldots ,d\), and \(\varvec{\beta }\in \mathbb {R}^{d'} \) with \(\beta _j\in [-m,m],\, j=1,\ldots ,d'\). Assume that the right hand side f of problem (\(P_{\text {hom}}\)) satisfies
-
(i)
\( f\in \bigcap _{l=0}^{\infty }H^l([0,T], L_2(D)\cap V^{\eta -2m}_{\varvec{\beta },\delta }(D))\),
-
(ii)
\(\partial _{t^l} f(0,x)=0\), \(l\in \mathbb {N}_0.\)
Furthermore, suppose that the closed strip between the lines \(\text {Re}\, \lambda =m-3/2\) and \(\text {Re}\, \lambda =\eta -\beta _j-3/2\) is free of eigenvalues of the pencil \({\mathfrak {A}}_j(\lambda )\) for \(j=1,\ldots ,d'\) and that
for \(k=1,\ldots ,d\). Then for the weak solution \(u\in H^1([0,T], \mathring{H}^m, H^{-m})\) (with time-derivatives \( \partial _{t^k}u\in H^1([0,T], \mathring{H}^m, H^{-m}) \) for all \(k\in \mathbb {N}\)) of (\(P_{\text {hom}}\)) we have
In particular, for the derivatives \(\partial _{t^k} u\), \(k=0,\ldots , l\), we have the a priori estimate
where the constant is independent of u and f.
Proof
We prove the theorem by induction. In particular, we first show the theorem for \(\eta =2m\) and \(l=0\). Then from the induction assumption \(\eta =2m,\, k=0,\ldots ,l-1\) we make an induction step to \(\eta =2m,\, k=l\). Afterwards, with the induction assumption \(\eta -1,\, l\in \mathbb {N}_0 \) we prove the theorem for arbitrary \(\eta \ge 2m\) and \(l\in \mathbb {N}_0\).
Let \(\eta =2m\). Since by our assumptions \(f, \partial _t f\in L_2(D_T)\hookrightarrow L_2([0,T],H^{-m}(D))\) it follows from Theorem 3.4, [26, p. 143, and Lem. 3.1.6], and (2.1.4) that \(\partial _t u(t) \in \mathring{H}^m(D)\subset V^0_{\varvec{\beta },\delta }(D)\) if \(-m\le \beta _j,\, j=1,\ldots ,d'\) and \(-m\le \delta _k,\, k=1,\ldots ,d\). In this case Theorem 3.4 gives the estimate
Moreover, since
where for fixed t the right hand side F(t) belongs to \(V^0_{\varvec{\beta },\delta }(D)\) (and due to the fact that \(\beta _j,\,\delta _k \le m\), we have \(\partial _t u(t) \in \mathring{H}^m(D)\hookrightarrow V^0_{\varvec{\beta },\delta }(D)\hookrightarrow V^{-m}_{0,0}(D)\), thus, also \(F(t)\in V^{-m}_{0,0}(D)\)) an application of Lemma 3.1 (with \({\tilde{\gamma }}=m\), \({\tilde{\beta }}_j=0,\, j=1,\ldots ,d'\), \({\tilde{\delta }}_k=0,\, k=1,\ldots ,d\), \(\gamma '=2m\), \(\varvec{\beta }'=\varvec{\beta }\), \(\delta '=\delta \)) gives \(u(t)\in V^{2m}_{\varvec{\beta },\delta }(D)\) with the a priori estimate
Now integration w.r.t. the parameter t and (3.3.9) prove the claim for \(\eta =2m\) and \(l=0\), i.e.,
We now assume that the claim is true for \(\eta =2m\) and \(k=0,\ldots , l-1\). Then differentiating (\(P_{\text {hom}}\)) l-times gives
By our initial assumptions \(\partial _{t^l}f(t)\in V^0_{\varvec{\beta },\delta }(D)\) and \(\partial _{t^{l+1}}u(t)\in \mathring{H}^m(D)\hookrightarrow V^0_{\varvec{\beta },\delta }(D)\). Moreover, the inductive assumptions provide us with \(\partial _{t^k}u(t)\in V^{2m}_{\varvec{\beta },\delta }(D)\), thus, \(\partial _{t^{l-k}}L(\partial _{t^k}u)(t)\in V^{0}_{\varvec{\beta },\delta }(D)\) and we see that \(F_2(t)\in V^{0}_{\varvec{\beta },\delta }(D)\). Applying Lemma 3.1 (again with \({\tilde{\gamma }}=m\), \({\tilde{\beta }}_j=0,\, j=1,\ldots ,d'\), \( {\tilde{\delta }}_k=0,\, k=1,\ldots ,d\), \(\gamma '=2m\), \(\varvec{\beta }'=\varvec{\beta }\), \(\delta '=\delta \)) gives \(\partial _{t^l}u(t)\in V^{2m}_{\varvec{\beta },\delta }(D)\) and we have the following a priori estimate
Integration w.r.t. t, our inductive assumptions, and Theorem 3.4 give
Assume now inductively that our assumption holds for \(\eta -1\) and all derivatives \(l\in \mathbb {N}_0\). We are going to show first that the claim then holds for \(\eta \) and \(l=0\) as well. Looking at (3.3.10) we see that \(f(t)\in V^{\eta -2m}_{\varvec{\beta },\delta }(D)\) and by our inductive assumption and Lemma 2.5 we obtain \(\partial _t u(t)\in V^{\eta -1}_{\varvec{\beta },\delta }(D) \hookrightarrow V_{\varvec{\beta },\delta }^{\eta -2m}(D)\) for \(m\ge 1\). Therefore, \( F(t)\in V_{\varvec{\beta },\delta }^{\eta -2m}(D)\) and an application of Lemma 3.1 (with \({\tilde{\gamma }}=m,\, {\tilde{\beta }}_j=0,\, j=1,\ldots ,d',\, {\tilde{\delta }}_k=0,\, k=1,\ldots ,d,\, \gamma '=\eta ,\, \varvec{\beta }'=\varvec{\beta },\, \delta '=\delta \)) gives \(u(t) \in V_{\varvec{\beta },\delta }^{\eta }(D)\) with a priori estimate
Integration w.r.t. the parameter t and our inductive assumptions show that the claim is true for \(\eta \) and \(l=0\), i.e.,
Suppose now that it is true for \(\eta \) and derivatives \(k=0,\ldots , l-1\). Differentiating (\(P_{\text {hom}}\)) l-times again gives (3.3.11). From our initial assumptions on f we see that \(\partial _{t^l}f(t)\in V^{\eta -2m}_{\varvec{\beta },\delta }(D)\) and from the inductive assumptions it follows that \(\partial _{t^{l+1}}u(t)\in V^{\eta -1}_{\varvec{\beta },\delta }(D)\hookrightarrow V^{\eta -2m}_{\varvec{\beta },\delta }(D)\). Moreover, by the inductive assumptions \(\partial _{t^k}u(t)\in V^{\eta }_{\varvec{\beta },\delta }(D)\) for \(k=0,\ldots , l-1\), and therefore,
This shows that the right hand side in (3.3.11) satisfies \(F_2(t)\in V^{\eta -2m}_{\varvec{\beta },\delta }(D)\). Applying Lemma 3.1 again (with \({\tilde{\gamma }}=m\), \({\tilde{\beta }}_j=0\), \({\tilde{\delta }}_k=0\), \(\gamma '=\eta \), \(\varvec{\beta }'=\varvec{\beta }\), \(\delta '=\delta \)) gives \(u(t)\in V^{\eta }_{\varvec{\beta },\delta }(D)\) with a priori estimate
Integration w.r.t. the parameter t together with our inductive assumptions gives
which finishes the proof. \(\square \)
Remark 3.18
In Theorem 3.17 compared to Theorem 3.14 we require for \(\delta _k,\, k=1,\ldots ,d\) only the parameter restrictions
where \(\eta \ge 2m\). Focusing again on the heat equation with \(m=1\) and \(\delta _+^{(k)}=\frac{\pi }{\theta _k}\) this is satisfied if we assume
Hence, we require
Let now an angle \(\theta _k\) of D be non-convex, i.e., \(\theta _k>\pi \), then only \(\eta =2\) is possible at best. Moreover, the restriction \(1-\frac{\pi }{\theta _k}< \delta _k\le 1\) leads to the same situation that we already discussed in Remark 3.16.
On the other hand, for smaller angles we obtain a better result compared to Theorem 3.14: If \(\theta _k=\frac{\pi }{4}\) (or slightly below) then \(\eta <6 \) is allowed (compared to \(\gamma _1<2\) in Theorem 3.14 and hence, maximal regularity of u being \(2(\gamma _1+1)=4\)) and suitable \(\delta _k\)’s can be chosen.
Again we refer to the discussion in Remark 3.16 in this context. As was also mentioned there we deduce from the above considerations that the ’best’ possible range for \(\eta \) is obtained for a tetrahedron with angles \(\theta =\frac{\pi }{3}\): In this case \(\eta <2+3=5\), and thus, \(2\le \eta \le 4\) with \(-1<\delta _k\le 1\) for \(\eta =2,3\) and \(0<\delta _k\le 1\) for \(\eta =4\).
3.3.2 Weighted Sobolev regularity for the inhomogeneous problem
We now generalize Theorem 3.14 to inhomogeneous boundary conditions. The proof is based on the homogeneous case subject to suitable modifications.
Theorem 3.19
(\(A_{\text {inhom}}\): Regularity in V-spaces of inhomogeneous problem) Let \(D\subset \mathbb {R}^3\) be a bounded Lipschitz domain of polyhedral type with edges \(M_1,\ldots ,M_d\) and vertices \(x^{(1)},\ldots ,x^{(d')} \). Let \(\gamma \in \mathbb {N} \) with \(\gamma \ge 2m\) and put \(\gamma _m:=\left[ \frac{\gamma -1}{2m}\right] \). Furthermore, let \( \delta \in \mathbb {R}^d\), \(\varvec{\beta }\in \mathbb {R}^{d'}\) with \({\delta _k\in [-m,m]}\) for \(k=1,\ldots ,d\) and \(\beta _j\in [-m,m] \) for \(j=1,\ldots ,d'\). Assume that \(f,\,g,\, u_0\) of problem (\(P_{\text {inhom}}\)) satisfy
-
(i)
\(\partial _{t^k} f\in L_2([0,T],H^{(\gamma _m+1-k)2m}(D)\cap V_{\varvec{\beta },\delta }^{2m(\gamma _m-k)}(D) )\), \(k=0,\ldots , \gamma _m\), and
\(\partial _{t^{\gamma _m+1}} f\in L_2(D_T)\),
-
(ii)
\(\partial _{t^k}g\in L_2([0,T],H^{(\gamma _m+2-k)2m+m}(D)\cap V_{\varvec{\beta },\delta }^{2m(\gamma _m+1-k)}(D) )\), \(k=0,\ldots ,\gamma _m+1\), and \(\partial _{t^{\gamma _m+2}}g\in L_2([0,T],H^m(D))\),
-
(iii)
\(u_0\in H^{(2(\gamma _m+1)+1)m}(D),\)
and the \((\gamma _m+1)\)-st order compatibility conditions from Definition 3.10 hold. Moreover, suppose that the closed strip between the lines \(\text {Re}\, \lambda =m-3/2\) and \(\text {Re}\, \lambda = 2\,m(\gamma _m-i)-\beta _j+2m-3/2\) is free of eigenvalues of the pencil \({\mathfrak {A}}_j(\lambda )\) for \(j=1,\ldots ,d',\, i=0,\ldots ,\gamma _m\) and that
for \(k=1,\ldots ,d\) and \(i=0,\ldots ,\gamma _m\). Then for the weak solution \(u\in H^1([0,T], {H}^m, {L_2})\) (with derivatives \(\partial _{t^k}u\in H^1([0,T], {H}^m, {L_2})\) for \(k=1,\ldots ,\gamma _m+1\)) of problem (\(P_{\text {inhom}}\)) we have
for \(l=-1,0,\ldots , \gamma _m\). In particular, for the derivatives \(\partial _{t^{l+1}} u\) up to order \(\gamma _m+1\) we have the a priori estimate
where the constant is independent of \(f,\,g,\,u_0\), and u.
Remark 3.20
The existence of the solution \(u\in H^1([0,T], {H}^m, {L_2})\) with \(\partial _{t^k}u\in H^1([0,T], {H}^m, {L_2})\) for \(k=1,\ldots ,\gamma _m+1\) in Theorem 3.19 follows from Theorems 3.5 and 3.12 with \(l=\gamma _m+1\).
Proof
We prove the theorem by induction. In particular, we first show the claim for the induction basis \(\gamma =2m\). Then we proceed with the induction step from \(\gamma -1\) to \(\gamma \) with \(l=\gamma _m\), and finally, we make a backwards induction from \(l=\gamma _m,\gamma _m-1,\ldots ,i\) to \(l=i-1\) with arbitrary \(\gamma \).
We define the function \(w:=u-g\) and consider again the following equivalent problem to problem (\(P_{\text {inhom}}\)):
Let \(\gamma =2m\), then we have \(\gamma _m=0\). Since by our assumptions \(f,\, \partial _t g\in L_2([0,T],H^{2m}(D))\) and \(g\in L_2([0,T],H^{4m}(D))\), we have \(F\in L_2([0,T],H^{2m}(D))\). Moreover, from \(\partial _t f,\,\partial _{t^2}g\in L_2([0,T],L_2(D)) \) and from the assumptions on g above we obtain that \(\partial _t F\in L_2(D_T) \). Finally, applying Lemma 2.17 to g, since \(g\in L_2([0,T],H^{4m}(D))\), \( \partial _t g\in L_2([0,T],H^{2m}(D))\) we deduce
with the estimate
Hence, we obtain \(u_0-g(0,\cdot )\in H^{3m}(D)\). Thus, it follows from Theorem 3.12 that \(w(t),\, \partial _t w(t)\in {\mathring{H}^m(D)}\). Furthermore, according to [26, p. 143, and Lem. 3.1.6] and Lemma 2.5 one obtains that \(\mathring{H}^m(D)\subset V_{0,0}^m(D)\subset V_{\varvec{\beta },\delta }^0(D)\) if \(-m\le \beta _j\) for all \(j=1,\ldots ,d'\) and \(-m\le \delta _k\) for all \(k=1,\ldots ,d\). In this case Theorem 3.12 gives the estimate
Moreover, we have
where for fixed t the right hand side belongs to \(V_{\varvec{\beta },\delta }^0(D)\) (cf. (3.3.16) and the initial assumptions on \(f,\,g,\,u_0\)) and according to (2.1.4) also to \( V_{0,0}^{-m}(D)\) if \(\beta _j\le m,\, j=1,\ldots ,d'\) and \(\delta _k\le m,\, k=1,\ldots ,d\). Thus, an application of Lemma 3.1 (with \({\tilde{\gamma }}=m\), \({\tilde{\delta }}_k=0\), \(k=1,\ldots ,d\), \(\tilde{\beta _j}=0\), \(j=1,\ldots ,d'\), \(\gamma '=2m\), \(\varvec{\beta }'=\varvec{\beta }\), \(\delta '=\delta \)) gives \(w(t)\in V_{\varvec{\beta },\delta }^{2m}(D)\) with the a priori estimate
Now integration w.r.t. the parameter t together with (3.3.16) yields
From (3.3.16) together with (3.3.17) we obtain
Using that \(u=w+g\) from (3.3.18), the initial assumptions and the fact that the differential operator L diminishes the space regularity by 2m we calculate
where we used (3.3.15) in the last step. This shows the claim for the induction basis \(\gamma =2m\).
Assume inductively that our assumption holds for \(\gamma -1\). This means, in particular, that we have the following a priori estimate
We are going to show that the claim then holds for \(\gamma \) as well. Let \(l=\gamma _m\). Then by our assumptions on \(f,\,g\) using that \(\partial _{t^k} (Lg)= \sum _{r=0}^k {k \atopwithdelims ()r} (\partial _{t^{k-r}}L)(\partial _{t^r}g)\) (where \(\partial _{t^{k-r}}L= \sum _{|\alpha |,|\beta |=0}^m (-1)^{|\alpha |}\partial _x^{\alpha }(\partial _{t^{k-r}} a_{\alpha \beta } \partial _x^{\beta }) \)) and the fact that the differential operators \(\partial _{t^i}L\) diminish the space regularity by 2m for \(i=0,\ldots ,k\) (since the coefficients \(a_{\alpha \beta }\) are smooth functions), we have \(\partial _{t^{k}} F\in L_2([0,T],H^{(\gamma _m+1-k)2m}(D))\) for \(k=0,\ldots , \gamma _m+1\).
Moreover, since \(g\in L_2([0,T],H^{(\gamma _m+2)2m}(D))\) and \(\partial _{t}g \in L_2([0,T],H^{(\gamma _m+1)2m}(D))\) we deduce from Lemma 2.17 that \(g\in C([0,T],H^{(2(\gamma _m+1)+1) m}(D))\) with the a priori estimate
This implies that \(u_0-g(0,\cdot )\in H^{(2(\gamma _m+1)+1) m}(D) \). Then by Theorem 3.12 together with (2.1.4) and \(\mathring{H}^m(D)=\mathring{V}_{0,0}^m(D)\), cf. [26, p. 143], we have
where \(j=1,\ldots ,d'\) and \(k=1,\ldots ,d\). In particular, Theorem 3.12 provides us with the a priori estimate
from which we obtain
We first estimate term I and calculate
For term II we use (3.3.20) and obtain
which together with (3.3.21) and (3.3.22) shows the claim for \(l=\gamma _m\) and arbitrary \(\gamma \). Hence, the claim holds for \(l=\gamma _m\). We now proceed by backwards induction. Suppose now the result holds for \(\gamma \) and \(l=\gamma _m, \gamma _m-1, \ldots , i\), where \(0\le i\le \gamma _m\). We show that it then also holds for \(i-1\). Differentiating (3.3.13) i-times gives
From our initial assumptions on f and g we see that \(\partial _{t^i}F(t)\in V^{2m(\gamma _m-i)}_{\varvec{\beta },\delta }(D)\) and from the initial assumptions on g together with the inductive assumptions it follows for \(w=u-g\) that \(\partial _{t^{i+1}}w(t)\in V^{2m(\gamma _m-i)}_{\varvec{\beta },\delta }(D)\) and
where we used Lemma 2.5 and the fact that \((\gamma -1)_m-(r-1)\ge \gamma _m-i+1\) for \(r=0,\ldots , i-1\). Since the differential operator \(\partial _{t^{i-k}} L\) diminishes the space regularity by 2m, from (3.3.24) we see that
Hence, the right hand side of (3.3.23) belongs to \( L_2([0,T],V^{2m(\gamma _m-i)}_{\varvec{\beta },\delta }(D))\) and by (2.1.4) also to \( L_2([0,T],V^{-m}_{0,0}(D))\) since \(\beta _j\le m\), \(\delta _k\le m\) for \(j=1,\ldots ,d'\) and \(k=1,\ldots ,d\). An application of Lemma 3.1 (now with \(\gamma '=2m(\gamma _m-(i-1))\), \(\varvec{\beta }'=\varvec{\beta }\), \( \delta '=\delta \) and again taking \({\tilde{\gamma }}=m\), \({\tilde{\beta }}_j=0\) for \(j=1,\ldots ,d'\) and \({\tilde{\delta }}_k=0\) for \(k=1,\ldots ,d\), since \(\partial _{t^{(i-1)+1}}w(t)\in \mathring{H}^m(D)\subset V^m_{0,0}(D)\)) yields
Moreover, we have the a priori estimate
where we used (3.3.24) in the last step. From that we obtain
Using the fact that
and integrating (3.3.25) w.r.t. the parameter t together with the inductive assumptions on \(\partial _{t^{i+1}}u\) and \(\partial _{t^r} u\) (cf. (3.3.19)) we obtain the a priori estimate
where we used \((\gamma -1)_m\le \gamma _m\). This shows that the claim is true for \(i-1\), which completes the proof. \(\square \)
We now generalize Theorem 3.17 to inhomogeneous boundary conditions. The proof is again based on the homogeneous case subject to suitable modifications.
Theorem 3.21
(\(B_{\text {inhom}}\): Regularity in V-spaces of inhomogeneous problem) Let \(D\subset \mathbb {R}^3\) be a bounded Lipschitz domain of polyhedral type with edges \(M_1,\ldots ,M_d\) and vertices \(x^{(1)},\ldots ,x^{(d')} \) and let \(\eta \in \mathbb {N} \) with \(\eta \ge 2m\). Moreover, let \(\delta \in \mathbb {R}^d\) with \(\delta _k\in [-m,m],\, k=1,\ldots ,d\), and \(\varvec{\beta }\in \mathbb {R}^{d'} \) with \(\beta _j\in [-m,m],\, j=1,\ldots ,d'\). Furthermore, let \(l\in \mathbb {N}_0\) be an arbitrary large fixed number. Assume that the right hand side of problem (\(P_{\text {inhom}}\)) satisfies
-
(i)
\( \partial _{t^k}f\in L_2([0,T],H^{(\eta -2m+l+1-k)2m}(D)\cap V^{\eta -2m}_{\varvec{\beta },\delta }(D))\) for all \(k=0,\ldots ,\eta -2m+l\), and \( \partial _{t^{\eta -2m+l+1}}f\in L_2(D_T)\),
-
(ii)
\( \partial _{t^k}g\in L_2([0,T],{ H^{(\eta -2m+l+2-k)2m+m}(D)}\cap V^{\eta }_{\varvec{\beta },\delta }(D))\) for all \(k=0,\ldots ,\eta -2m+l+1\), and \( \partial _{t^{\eta -2m+l+2}}g\in L_2([0,T],H^m(D))\),
-
(iii)
\(u_0\in H^{(2(\eta -2m+l+1)+1)m}(D),\)
and the \(({\eta -2m+l+1})\)-st order compatibility conditions from Definition 3.10 hold. Moreover, suppose that the closed strip between the lines \(\text {Re}\, \lambda =m-3/2\) and \(\text {Re}\, \lambda =\eta -\beta _j-3/2\) is free of eigenvalues of the pencil \({\mathfrak {A}}_j(\lambda )\) for \(j=1,\ldots ,d'\) and that
for \(k=1,\ldots ,d\). Then for the weak solution \(u\in H^1([0,T], {H}^m, {L_2})\) (with \(\partial _{t^k}u\in H^1([0,T], {H}^m, {L_2}) \) for \(k=1,\ldots ,\eta -2m+l+1\)) of (\(P_{\text {inhom}}\)) we have
In particular, for the derivatives of u up to order l we have the a priori estimate
where the constant is independent of \(f,\,g,\,u_0\), and u.
Remark 3.22
The existence of the solution \(u\in H^1([0,T], {H}^m, {L_2})\) with \(\partial _{t^k}u\in H^1([0,T], {H}^m, {L_2})\) for \(k=1,\ldots ,\eta -2m+l+1\) in Theorem 3.21 follows from Theorems 3.5 and 3.12 replacing l by \(\eta -2m+l+1\).
Proof
We prove the theorem by induction. In particular, we first show the theorem for \(\eta =2m\) and \(l=0\). Then from the induction assumption \(\eta =2m,\, k=0,\ldots ,l-1\) we make an induction step to \(\eta =2m,\, k=l\). Afterwards, with the induction assumption \(\eta -1,\, l\in \mathbb {N}_0 \) we prove the theorem for arbitrary \(\eta \ge 2m\) and \(l\in \mathbb {N}_0\).
We define the function \(w:=u-g\) and consider again the following equivalent problem to problem (\(P_{\text {inhom}}\)):
Let \(\eta =2m\) and \(l=0\). Since by our assumptions \(F\in L_2([0,T],H^{2m}(D)),\, \partial _t F\in L_2(D_T),\, u_0-g(0,\cdot )\in H^{3m}(D)\), cf. (3.3.14), it follows from Theorem 3.12, [26, p. 143, and Lem. 3.1.6], and (2.1.4) that \(w(t),\,\partial _t w(t) \in \mathring{H}^m(D)\subset V^0_{\varvec{\beta },\delta }(D)\) if \(-m\le \beta _j,\, j=1,\ldots ,d'\) and \(-m\le \delta _k,\, k=1,\ldots ,d\). In this case Theorem 3.12 gives the estimate
Moreover, we have
where for fixed t the right hand side belongs to \(V_{\varvec{\beta },\delta }^0(D)\) (cf. (3.3.28) and the initial assumptions on \(f,\,g\)) and according to (2.1.4) also to \( V_{0,0}^{-m}(D)\) if \(\beta _j\le m,\, j=1,\ldots ,d'\) and \(\delta _k\le m,\, k=1,\ldots ,d\). Thus, an application of Lemma 3.1 (with \({\tilde{\gamma }}=m\), \({\tilde{\delta }}_k=0\), \(k=1,\ldots ,d\), \(\tilde{\beta _j}=0\), \(j=1,\ldots ,d'\), \(\gamma '=2m\), \(\varvec{\beta }'=\varvec{\beta }\), \(\delta '=\delta \), since \(w(t) \in \mathring{H}^m(D)\subset V^0_{\varvec{\beta },\delta }(D) \)) gives \(w(t)\in V_{\varvec{\beta },\delta }^{2m}(D)\) with the a priori estimate
Now integration w.r.t. the parameter t together with (3.3.28) yields
Using that \(u=w+g\) from (3.3.30), the initial assumptions and the fact that the differential operator L diminishes the space regularity by 2m we calculate
where we used again (3.3.15) in the last step. This shows the claim for the induction basis \(\eta =2m\) and \(l=0\).
We now assume that the claim is true for \(\eta =2m\) and \(k=0,\ldots , l-1\). Then differentiating (3.3.27) l-times gives
By our initial assumptions \(\partial _{t^l}F(t)\in V^0_{\varvec{\beta },\delta }(D)\) and \(\partial _{t^{l+1}}w(t)\in \mathring{H}^m(D)\hookrightarrow V^0_{\varvec{\beta },\delta }(D)\). Moreover, the inductive assumptions provide us with \(\partial _{t^r}w(t)\in V^{2m}_{\varvec{\beta },\delta }(D),\, r=0,\ldots ,l-1\), thus, \(\partial _{t^{l-r}}L(\partial _{t^r}u)(t)\in V^{0}_{\varvec{\beta },\delta }(D)\) and we see that \(F_2(t)\in V^{0}_{\varvec{\beta },\delta }(D)\). Applying Lemma 3.1 (again with \({\tilde{\gamma }}=m\), \({\tilde{\beta }}_j=0,\, j=1,\ldots ,d'\), \( {\tilde{\delta }}_k=0,\, k=1,\ldots ,d\), \(\gamma '=2m\), \(\varvec{\beta }'=\varvec{\beta }\), \(\delta '=\delta \), since \(\partial _{t^l}w(t)\in \mathring{H}^m(D)\subset V_{0,0}^m(D)\)) gives \(\partial _{t^l}w(t)\in V^{2m}_{\varvec{\beta },\delta }(D)\) and we have the following a priori estimate
Integration w.r.t. t, our inductive assumptions, the embedding \(\mathring{H}^m(D)\subset V^0_{\varvec{\beta },\delta }(D)\) and Theorem 3.12 give (using again that \(u=w+g\))
This shows the claim for \(\eta =2m\) and arbitrary l.
Assume now inductively that our assumption holds for \(\eta -1\) and all derivatives \(l\in \mathbb {N}_0\). We are going to show first that the claim then holds for \(\eta \) and \(l=0\) as well. Looking at (3.3.29) we see that \(F(t)\in V^{\eta -2m}_{\varvec{\beta },\delta }(D)\) and by our inductive assumption and Lemma 2.5 we obtain \(\partial _t w(t)\in V^{\eta -1}_{\varvec{\beta },\delta }(D) \hookrightarrow V_{\varvec{\beta },\delta }^{\eta -2m}(D)\) for \(m\ge 1\). Therefore, \( F(t)-\partial _t w(t)\in V_{\varvec{\beta },\delta }^{\eta -2m}(D)\). Hence, an application of Lemma 3.1 (with \({\tilde{\gamma }}=m,\, {\tilde{\beta }}_j=0,\, j=1,\ldots ,d',\, {\tilde{\delta }}_k=0,\, k=1,\ldots ,d,\, \gamma '=\eta ,\, \varvec{\beta }'=\varvec{\beta },\, \delta '=\delta \), since \(w(t)\in \mathring{H}^m(D)\subset V_{0,0}^m(D)\)) gives \(w(t) \in V_{\varvec{\beta },\delta }^{\eta }(D)\) with a priori estimate
Integration w.r.t. the parameter t and our inductive assumptions show that the claim is true for \(\eta \) and \(l=0\), i.e.,
where we used \(V^{\eta -2m}_{\beta ,\delta }(D)\hookrightarrow V^{\eta -1-2m}_{\beta ,\delta }(D)\).
Suppose now that it is true for \(\eta \) and derivatives \(r=0,\ldots , l-1\). Differentiating (\(P_{\text {inhom}}\)) l-times again gives (3.3.31). From our initial assumptions on \(f,\,g\) we see that \(\partial _{t^l}F(t)\in V^{\eta -2m}_{\varvec{\beta },\delta }(D)\) and from the inductive assumptions it follows that \(\partial _{t^{l+1}}w(t)\in V^{\eta -1}_{\varvec{\beta },\delta }(D)\hookrightarrow V^{\eta -2m}_{\varvec{\beta },\delta }(D)\). Moreover, by the inductive assumptions \(\partial _{t^r}w(t)\in V^{\eta }_{\varvec{\beta },\delta }(D)\) for \(r=0,\ldots , l-1\), and therefore,
This shows that the right hand side in (3.3.31) satisfies \(F_2(t)\in V^{\eta -2m}_{\varvec{\beta },\delta }(D)\). Applying Lemma 3.1 again (with \({\tilde{\gamma }}=m\), \({\tilde{\beta }}_j=0\), \(j=1,\ldots ,d'\), \({\tilde{\delta }}_k=0\) \(k=1,\ldots ,d\), \(\gamma '=\eta \), \(\varvec{\beta }'=\varvec{\beta }\), \(\delta '=\delta \), since \(\partial _{t^l}w(t)\in \mathring{H}^m(D)\subset V_{0,0}^m(D)\)) gives \(\partial _{t^l}w(t)\in V^{\eta }_{\varvec{\beta },\delta }(D)\) with a priori estimate
Integration w.r.t. the parameter t together with our inductive assumptions and with the embedding \(V^{\eta -1}_{\varvec{\beta },\delta }(D)\hookrightarrow V^{\eta -2m}_{\varvec{\beta },\delta }(D)\) yields
where we used \(V^{\eta -2m}_{\beta ,\delta }(D)\hookrightarrow V^{\eta -1-2m}_{\beta ,\delta }(D)\). This shows the claim for arbitrary \(\eta \ge 2m\) and \(l\in \mathbb {N}_0\), which finishes the proof. \(\square \)
3.4 Regularity results in Besov spaces
In this section we study regularity in Besov spaces for the parabolic problems (\(P_{\text {hom}}\)) and (\(P_{\text {inhom}}\)) with homogeneous and inhomogeneous boundary conditions, respectively, on domains of polyhedral type. We shall rely on our previous regularity results in weighted Sobolev spaces (cf. Theorems 3.14, 3.17, 3.19, and 3.21).
3.4.1 Besov regularity for the homogeneous problem
A combination of the regularity results from Theorems 3.4 and 3.14 together with the embedding from Theorem 2.10 yields the following result concerning Besov regularity of the homogeneous parabolic problem (\(P_{\text {hom}}\)).
Theorem 3.23
(\(A_{\text {hom}}\): Besov regularity of homogeneous problem) We assume that the conditions of Theorem 3.14 hold. Then for the weak solution \(u\in H^1([0,T], \mathring{H}^m, {H^{-m}}) \) of problem (\(P_{\text {hom}}\)) we have for \(\frac{1}{\tau }=\frac{r}{3}+\frac{1}{2}\) that
Moreover, we have the a priori estimate
where the constant is independent of u and f.
Proof
By the assumptions, Theorem 3.14 provides a solution \( u\in L_2([0,T],V_{\varvec{\beta },\delta }^{2m(\gamma _m+1)}(D))\). Using Theorem 2.10 (with \(l:=2m(\gamma _m+1),\, s:=m,\, p:=2\)) and the fact that \(B^m_{2,2}(D)=H^m(D)\) (in sense of equivalent norms) we obtain
where the restrictions on r in (3.4.1) immediately follow from the restrictions of Theorem 2.10. Moreover, \(2m(\gamma _m+1)>\beta \) holds, since \(2m(\gamma _m+1)> m\ge \beta \).
Furthermore, the a priori estimate (3.4.2) follows from (3.4.3), Theorem 3.4 and Theorem 3.14 with the following consideration,
This completes the proof. \(\square \)
Remark 3.24
We consider some interesting cases of Theorem 3.23 using the results of [29, Rem. 4.6], where the underlying domain is a polyhedral domain with equal angles \(\theta \) and n edges by a vertex. If we consider the heat equation with \(s:=m=1\) and replace l by \(2m(\gamma _m+1)=2\gamma _1+2\), from [29, Rem. 4.6] we obtain that
Hence, from (3.4.1) we deduce
For a tetrahedron (\(\theta <\frac{\pi }{2}\)) with \(n=3\) and \(\gamma _1=1\), cf. Remark 3.16, this yields \( r<3.\) Furthermore, for a cube (\(\theta =\frac{\pi }{2}\)) with \(n=3\) and \(\gamma _1=0\), cf. (3.3.7), we get \( r< 2.\)
Alternatively, we combine Theorems 2.10, 3.4, and 3.17. This leads to the following regularity result in Besov spaces for the homogeneous problem (\(P_{\text {hom}}\)).
Theorem 3.25
(\(B_{\text {hom}}\): Besov regularity of homogeneous problem) We assume that the conditions of Theorem 3.17 hold. Then for the weak solution \(u\in H^1([0,T], \mathring{H}^m, H^{-m})\) of (\(P_{\text {hom}}\)) we have for \(\frac{1}{\tau }=\frac{r}{3}+\frac{1}{2}\) that
In particular, we have the a priori estimate
where the constant is independent of u and f.
Proof
According to Theorem 3.17 by our assumptions we know \(u\in L_2([0,T],V_{\varvec{\beta },\delta }^{\eta }(D))\). Using Theorem 2.10 (now with \(l:=\eta ,\, s:=m,\, p:=2\)) and the fact that \(B^m_{2,2}(D)=H^m(D)\) (in sense of equivalent norms) we obtain
where the restrictions on r in (3.4.4) immediately follow from the restrictions of Theorem 2.10. Moreover, \(\eta >\beta \) holds, since \(\eta \ge 2m> m\ge \beta \). Furthermore, the a priori estimate (3.4.5) follows from (3.3.8), (3.4.6) and Theorem 3.4 with similar consideration as in the proof of Theorem 3.23. \(\square \)
Remark 3.26
For the same case as in Remark 3.24 replacing now l by \(\eta \) we obtain with analogous arguments that
Now in view of Remark 3.18 we can assume \(\eta =3\) for a tetrahedron or a cube (\(\theta \le \frac{\pi }{2}\)) with \(n=3\) (the number of the edges by a vertex) and conclude \( r< 3. \)
3.4.2 Besov regularity for the inhomogeneous problem
We now provide two regularity results in Besov spaces for the inhomogeneous problem. First we consider the counterpart of Theorem 3.23. The proof is analogous replacing Theorem 3.4 by Theorems 3.12 and 3.14 by Theorem 3.19.
Theorem 3.27
(\(A_{\text {inhom}}\): Besov regularity of inhomogeneous problem) We assume that the conditions of Theorem 3.19 hold. Then for the weak solution \(u\in H^1([0,T], {H}^m, {L_2})\) of problem (\(P_{\text {inhom}}\)) we have for \(\frac{1}{\tau }=\frac{r}{3}+\frac{1}{2}\) that
Moreover, the norm \(\Vert u|L_2([0,T], B_{\tau ,\tau }^r(D))\Vert \) can be estimated from above by the right-hand side of (3.3.12).
Proof
This follows from similar considerations as in Theorem 3.23 now replacing Theorem 3.14 by Theorem 3.19, which yields
Furthermore, the a priori estimate follows from (3.4.7), (3.2.4), and (3.3.12). \(\square \)
Alternatively, we can combine Theorem 2.10 with Theorem 3.21 and obtain the following theorem.
Theorem 3.28
(\(B_{\text {inhom}}\): Besov regularity of inhomogeneous problem) We assume that the conditions of Theorem 3.21 hold. Then for the weak solution \(u\in H^1([0,T], {H}^m, {L_2})\) of (\(P_{\text {inhom}}\)) we have for \(\frac{1}{\tau }=\frac{r}{3}+\frac{1}{2}\) that
Moreover, the norm \(\Vert u|L_2([0,T],B^r_{\tau ,\tau }(D))\Vert \) can be estimated from above by the right-hand side of (3.3.26).
Proof
This follows by similar considerations as in Theorem 3.25 now replacing Theorem 3.17 by Theorem 3.21, which yields
Furthermore, the a priori estimate follows from (3.3.26), (3.4.8), and (3.2.4). \(\square \)
3.4.3 Hölder–Besov regularity for the homogeneous problem
We observe the fact that Theorems 3.14 and 3.17 not only provide regularity properties of the solution u of problem (\(P_{\text {hom}}\)) but also of its partial derivatives \(\partial _{t^k}u\). Following [28, Subsec. 5.4.3] in this subsection we use this fact in combination with the generalized Sobolev embedding (2.3.6) in order to obtain some mixed Hölder–Besov regularity results.
Theorem 3.29
(\(A_{\text {hom}}\): Hölder–Besov regularity of homogeneous problem) We assume that the conditions of Theorem 3.14 together with \(\gamma \ge 4m+1\) hold. Then for the weak solution \(u\in H^1([0,T], \mathring{H}^m, H^{-m}) \) (with time-derivatives \(\partial _{t^k}u\in H^1([0,T], \mathring{H}^m, H^{-m}) \text { for } k=1,\ldots ,\gamma _{m}+1 \)) of problem (\(P_{\text {hom}}\)) we have for \( \frac{1}{\tau }=\frac{r}{3}+\frac{1}{2}\) that
Furthermore, the norm \( \Vert u| {\mathcal {C}}^{\gamma _m-2,\frac{1}{2}}([0,T],B^{r}_{\tau ,\tau }(D))\Vert \) can be estimated from above by the right-hand side of (3.3.1).
Proof
Using the fact that \(H^m(D)=B^m_{2,2}(D)\) in the sense of equivalent norms, Theorems 2.14, 3.4, 3.14, 2.10 together with (2.3.5) and the generalized Sobolev’s embedding (2.3.6), show that under the given assumptions we have for \(0\le k\le \gamma _m-2\) (where \(\gamma _m-2\ge 0\) since \(\gamma \ge 4m+1\)) that
where in the second step we require \(\eta \le 2m(\gamma _m-k)\). Moreover, in the last step by Theorem 2.10 we get the additional restrictions \(\eta >\beta \) and
Therefore, choosing \(k=\gamma _m-2\) the upper bound on r reads as
and for \(\eta =2m(\gamma _m-k)=4m\) it holds \(\eta >m\ge \beta \). Applying Theorems 3.4, 3.14, and the embedding (3.4.9) yields the a priori estimate
which for \(k=\gamma _m-2\) shows the a priori estimate and completes the proof. \(\square \)
Remark 3.30
-
(i)
For \(\gamma \ge 2m+1\) and \(k=\gamma _m-1\) we obtain \(r<\min \{ 2m,3(2m-|\delta ^+|)\}\) in the theorem above. For \(\gamma \ge 2m\) and \(k=\gamma _m\) we get \(\eta =r=0\) and \(\tau =2\) which for \( \beta ,\,\delta _i\in [-m,0]\), \(i=1,\ldots ,d,\) gives \( u\in {\mathcal {C}}^{\gamma _m,\frac{1}{2}}([0,T],L_2(D))\).
-
(ii)
In analogy to [28, Rem. 5.4.9] (for the case of Kondratiev spaces) from the proof above one can see that the solution satisfies
$$\begin{aligned} u\in {\mathcal {C}}^{k,\frac{1}{2}}([0,T],V_{\varvec{\beta },\delta }^{2m(\gamma _m-k)}(D)), \end{aligned}$$which implies that for high regularity in time, which is displayed by the parameter k, we have less spacial regularity in terms of \(2m(\gamma _m-k)\).
We now consider Theorem 3.17 instead of Theorem 3.14 and obtain the following Hölder–Besov regularity result.
Theorem 3.31
(\(B_{\text {hom}}\): Hölder-Besov regularity of homogeneous problem) We assume that the conditions of Theorem 3.17 hold. Then for the weak solution \(u\in H^1([0,T], \mathring{H}^m, H^{-m})\) (with time-derivatives \( \partial _{t^k}u\in H^1([0,T], \mathring{H}^m, H^{-m}) \) for all \(k\in \mathbb {N}\)) of (\(P_{\text {hom}}\)) we have for \( \frac{1}{\tau }=\frac{r}{3}+\frac{1}{2}\) and all \(k\in \mathbb {N}_0\) that
In particular, for fixed k we have the a priori estimate
where the constant is independent of u and f.
Proof
Using \(H^m(D)=B^m_{2,2}(D)\) in the sense of equivalent norms, Theorems 2.14, 3.4, 3.17, 2.10 together with (2.3.5) and the generalized Sobolev’s embedding (2.3.6), show that under the given assumptions we have for arbitrary \(k\in \mathbb {N}_0\) that
where in the last step by Theorem 2.10 we get the restrictions \(\eta >\beta \) (which is satisfied since \(\eta >m\ge \beta \)) and \(r<\min \{\eta ,3(\eta -|\delta ^+|),3m \}.\) Applying Theorems 3.4, 3.17, and embedding (3.4.11) yields the a priori estimate (3.4.10) and completes the proof. \(\square \)
3.4.4 Hölder–Besov regularity for the inhomogeneous problem
Replacing Theorems 3.4 and 3.14 in the proof of Theorem 3.29 by their inhomogeneous counterparts Theorems 3.12 and 3.19, respectively, immediately gives the following counterpart of Theorem 3.29 for the inhomogeneous problem.
Theorem 3.32
(\(A_{\text {inhom}}\): Hölder–Besov regularity of inhomogeneous problem) We assume that the conditions of Theorem 3.19 together with \(\gamma \ge 4m+1\) hold. Then for the weak solution \(u\in H^1([0,T], {H}^m,{L_2})\) (with derivatives \(\partial _{t^k}u\in H^1([0,T], {H}^m, {L_2})\) for \(k=1,\ldots ,\gamma _m+1\)) of problem (\(P_{\text {inhom}}\)) we have for \( \frac{1}{\tau }=\frac{r}{3}+\frac{1}{2}\) that
Furthermore, the norm \( \Vert u|{\mathcal {C}}^{\gamma _m-2,\frac{1}{2}}([0,T],B^{r}_{\tau ,\tau }(D))\Vert \) can be estimated from above by the right-hand side of (3.3.12).
In a similar manner as above, replacing Theorems 3.4 and 3.17 in the proof of Theorem 3.31 by Theorems 3.12 and 3.21, respectively, immediately yields the following counterpart of Theorem 3.31 for the inhomogeneous problem.
Theorem 3.33
(\(B_{\text {inhom}}\): Hölder–Besov regularity of inhomogeneous problem) We assume that the conditions of Theorem 3.21 hold. Then for the weak solution \(u\in H^1([0,T], {H}^m, {L_2})\) (with \(\partial _{t^k}u\in H^1([0,T], {H}^m, {L_2}) \) for \(k=1,\ldots ,\eta -2m+l+1\)) of (\(P_{\text {inhom}}\)) we have for \( \frac{1}{\tau }=\frac{r}{3}+\frac{1}{2}\) that
Moreover, the norm \( \Vert u| {\mathcal {C}}^{l-1,\frac{1}{2}}([0,T],B^r_{\tau ,\tau }(D))\Vert \) can be estimated from above by the right-hand side of (3.3.26).
Remark 3.34
Finally, we compare our regularity results in Besov and Hölder–Besov spaces obtained for parabolic PDEs (cf. Theorems 3.23, 3.25, 3.29, 3.27, 3.28, 3.32), which are based on the regularity results in weighted Sobolev spaces (the V-spaces), with the corresponding forerunners [28, Thms. 5.4.1, 5.4.5, 5.4.8].
-
Since the scale of V-spaces (our weighted Sobolev spaces with mixed weights) contains the scale of Kondratiev spaces on domains of polyhedral type, cf. Remark 2.4, our results are more general and cover the results from [28] completely.
-
Moreover, in Theorems 3.27, 3.28, and 3.32, we also study the inhomogeneous problem (\(P_{\text {inhom}}\)). Although we reduce the inhomogeneous case to the homogeneous one, for parabolic problems this transfer is technically quite involved and requires much more effort in comparison to the homogeneous case, see the proofs of Theorems 3.19 and 3.21 in this context.
-
We now compare the maximal Besov regularity obtained in [28, Thm. 5.4.1] with the regularity results from Theorem 3.23. In [28, Thm. 5.4.1] for a bounded polyhedral domain with singularity set of dimension 1 (i.e., a domain with edges) it was shown that
$$\begin{aligned} u\in L_2([0,T],B^r_{\tau ,\infty }(D))\quad \text {for all}\quad 0<r<\min \left( \gamma , 3m \right) , \end{aligned}$$(3.4.12)subject to some further restrictions on the parameters. In Theorem 3.23 we obtain
$$\begin{aligned} u\in L_2([0,T],B^r_{\tau ,\tau }(D)) \qquad \text {for all} \quad 0<r<\min \Big \{{\gamma },{3\big (\gamma -|\delta ^+|\big )}, {3m} \Big \}. \end{aligned}$$(3.4.13)Actually, in Theorem 3.23 we stated the upper bound with \(\gamma \) replaced by \(2m(\gamma _m+1)\) instead of \(\gamma \). However, these numbers are comparable (essentially the same). In particular, using the fact that \(2m(\gamma _m+1)=2m\left( \left[ \frac{\gamma -1}{2m}\right] +1\right) \ge \gamma \) and choosing \(r\le \gamma \) in (3.4.3) (which is how we argued in [28, Thm. 5.4.1]) yields (3.4.13). Alternatively, we might replace \(\gamma \) by \(2m(\gamma _m+1)\) in (3.4.12).
Comparing (3.4.12) with (3.4.13) we see that the first and third restriction are the same. Since we now deal with the more general V-spaces, we have the additional restriction \(3\big (\gamma -|\delta ^+|\big ) \) resulting from the embedding (2.2.1), which does not appear in [28, Thm. 5.4.1] when one deals with Kondratiev spaces.
The same phenomenon is observed when one compares [28, Thm. 5.4.5] and Theorem 3.25, which for the maximal Besov regularity yield the upper bounds \(r<\min (\eta ,3m)\) and \(r<\min (\eta ,3(\eta -|\delta ^+|),3m)\), respectively. Moreover in [28, Thm. 5.4.8] we have \(r<3m\) compared to \(r<\min (3(4m-|\delta ^+|),3m)\) in Theorem 3.29.
In conclusion, we see that the generalization from Kondratiev to the V-spaces does not yield a better result in terms of the maximal Besov regularity. It would therefore be sufficient to work with the Kondratiev spaces in this context. However, a lot of the regularity results for parabolic PDEs on non-smooth domains are stated in terms of V-spaces, and therefore, it makes sense to use them directly. Our major contribution in this paper is that we are able to study the maximal Besov regularity of inhomogeneous parabolic problems as well, which has not been done so far.
Data availability
All data generated or analysed during this study are included in this published article.
References
Aimar, H., Gómez, I., Iaffei, B.: Parabolic mean values and maximal estimates for gradients of temperatures. J. Funct. Anal. 255, 1939–1956 (2008)
Aimar, H., Gómez, I., Iaffei, B.: On Besov regularity of temperatures. J. Fourier Anal. Appl. 16, 1007–1020 (2010)
Aimar, H., Gómez, I.: Parabolic Besov regularity for the heat equation. Constr. Approx. 36, 145–159 (2012)
Anh, N.T., Hung, N.M.: Regularity of solutions of initial-boundary value problems for parabolic equations in domains with conical points. J. Differ. Equ. 245, 1801–1818 (2008)
Cohen, A.: Numerical Analysis of wavelet Methods. J. Studies in Mathematics and Its Applications, vol. 32, 1st edn. Elsevier, Amsterdam (2003)
Costabel, M.: On the limit Sobolev regularity for Dirichlet and Neumann problems on Lipschitz domains. Math. Nachr. 292, 2165–2173 (2019)
Dahlke, S., Dahmen, W., DeVore, R.: Nonlinear approximation and adaptive techniques for solving elliptic operator equations. In: Dahmen, W., Kurdila, A.J., Oswald, P. (eds.) Multiscale Wavelet Methods for Partial Differential Equations, Wavelet Analysis and Applications, vol. 6, pp. 237–283. Academic Press, San Diego (1997)
Dahlke, S., DeVore, R.A.: Besov regularity for elliptic boundary value problems. Commun. Partial Differ. Equ. 22(1–2), 1–16 (1997)
Dahlke, S., Hansen, M., Schneider, C., Sickel, W.: Properties of Kondratiev spaces (2020) (preprint)
Dahlke, S., Schneider, C.: Besov regularity of parabolic and hyperbolic PDEs. Anal. Appl. 17, 235–291 (2019)
Dahlke, S., Schneider, C.: Describing the singular behaviour of parabolic equations on cones in fractional Sobolev spaces. Int. J. Geomath. 9(2), 293–315 (2018)
Dahlke, S., Sickel, W.: Besov Regularity for the Poisson Equation in Smooth and Polyhedral Cones. Sobolev Spaces in Mathematics II. Applications in Analysis and Partial Differential Equations, pp. 123–145. Springer, New York (2008)
Daubechies, I.: Ten Lectures on Wavelets. Society for Industrial and Applied Mathematics, vol. 61, Philadelphia (1992)
Daubechies, I.: Orthonormal bases of compactly supported wavelets. Commun. Pure Appl. Math. 41(7), 909–996 (1998)
Dobrowolski, M.: Angewandte Funktionalanalysis. Springer-Lehrbuch Masterclass. Springer, Berlin (2010)
Evans, L.C.: Partial Differential Equations. Graduate Studies in Mathematics, vol. 19, 2nd edn. American Mathematical Society, Providence (2010)
Grisvard, P.: Singularities in Boundary Value Problems. Research Notes in Applied Mathematics, vol. 22. Springer, Berlin (1992)
Grisvard, P.: Elliptic Problems in Nonsmooth Domains. Reprint of the 1985 original. Classics in Applied Mathematics, vol. 69, SIAM, Philadelphia (2011)
Hansen, M.: Nonlinear approximation rates and Besov regularity for elliptic PDEs on polyhedral domains. Found. Comput. Math. 15, 561–589 (2015)
Jerison, D., Kenig, C.E.: The inhomogeneous Dirichlet problem in Lipschitz domains. J. Funct. Anal. 130, 161–219 (1995)
Johnson, J., Munch Hansen, S., Sickel, W.: Anisotropic, mixed-norm Lizorkin–Triebel spaces and diffeomorphic maps. J. Funct. Spaces Article ID 964794, 15 (2014)
Kozlov, V.A., Maz’ya, V.G., Rossmann, J.: Spectral Problems Associated with Corner Singularities of Solutions to Elliptic Equations. Mathematical Surveys and Monographs, vol. 85. AMS, Providence (2001)
Kufner, A.: Weighted Sobolev Spaces. Teubner-Texte zur Mathematik, vol. 31. Teubner Verlagsgesellschaft, Leipzig (1980)
Loi, D.V., Luong, V.T.: The first initial-boundary value problem for parabolic equations in a cone with edges. Vestnik SPBGU. Sep.1. T. 2(60), 394–404 (2015)
Meyer, Y.: Wavelets and Operators. Cambridge Studies in Advanced Mathematics, vol. 37. Cambridge (1992)
Maz’ya, V. G., Rossmann, J.: Elliptic Equations in Polyhedral Domains. Mathematical Surveys and Monographs, vol. 162. AMS, Providence (2010)
Rychkov, V.S.: On restrictions and extensions of the Besov and Triebel–Lizorkin spaces with respect to Lipschitz domains. J. Lond. Math. Soc. 60, 237–257 (1999)
Schneider, C.: Beyond Sobolev and Besov; Regularity of Solutions of PDEs and Their Traces in Function Spaces. Lecture Notes in Mathematics, vol. 2291. Springer (2021)
Schneider, C., Szemenyei, F.O.: Sobolev meets Besov: Regularity for the Poisson equation with Dirichlet, Neumann and mixed boundary values. Anal. Appl. 20(5), 989–1023 (2022)
Szemenyei, F. O.: Besov regularity of elliptic and parabolic PDEs with inhomogeneous boundary conditions on Lipschitz domains. Dissertation thesis, Fakultät für Mathematik, Friedrich-Alexander-Universität Erlangen-Nürnberg (2022)
Stein, E.M.: Singular Integrals and Differentiability Properties of Functions. Princeton University Press, Princeton (1970)
Temam, R.: Navier–Stokes Equations: Theory and Numerical Analysis. North-Holland Publishing Company-Amsterdam, New York, Oxford (1977)
Triebel, H.: Theory of Function Spaces. Monographs in Mathematics, vol. 78. Birkhäuser Verlag, Basel (1983)
Triebel, H.: Theory of Function Spaces II. Monographs in Mathematics, vol. 84. Birkhäuser Verlag, Basel (1992)
Wloka, J.: Partial Differential Equations. Cambridge Univ. Press, Cambridge (1992)
Acknowledgements
The work of the first author has been supported by Deutsche Forschungsgemeinschaft (DFG), Grant No. SCHN 1509/1-2. The work of the corresponding author has been supported by Program “Realisierung der Chancengleichheit für Frauen in Forschung und Lehre” (FFL).
Funding
Open Access funding enabled and organized by Projekt DEAL.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
This article is part of the section “Theory of PDEs” edited by Eduardo Teixeira.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Schneider, C., Szemenyei, F.O. Besov regularity of inhomogeneous parabolic PDEs. Partial Differ. Equ. Appl. 4, 43 (2023). https://doi.org/10.1007/s42985-023-00262-y
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s42985-023-00262-y
Keywords
- Parabolic problems
- Adaptive methods
- Besov spaces
- Weighted Sobolev spaces
- Mixed weights
- Domain of polyhedral type
- Banach-space valued function spaces
- Inhomogeneous boundary conditions