
Abstract
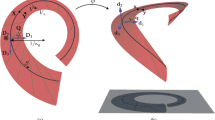
Motivated by a general thermomechanical theory of Cosserat rods, an isothermal constrained theory is developed which generalizes a three-dimensional elastica to have a growing circular cross-section and a growing centroidal length. An Eulerian formulation of constitutive equations is developed using evolution equations for elastic dilatation, elastic cross-sectional radial stretch, elastic curvature and elastic torsional twist. These evolution equations include time-dependent inelastic effects of homeostasis which cause a tendency for these elastic deformation measures to approach their homeostatic values. An important feature of the Eulerian evolution equations is that they depend only on the current state of the rod and therefore are appropriate for modeling growth. Examples of growing rods are considered. In particular, the example of a stress-free growing helical rod suggests a possible mechanical mechanism for a climbing vine which grabs an object as its radius decreases.


Similar content being viewed by others

Data availability
Data sharing not applicable to this article as no datasets were generated or analyzed during the current study.
References
Ambrosi, D., Ateshian, G.A., Arruda, E.M., Cowin, S., Dumais, J., Goriely, A., Holzapfel, G.A., Humphrey, J.D., Kemkemer, R., Kuhl, E., et al.: Perspectives on biological growth and remodeling. J. Mech. Phys. Solids. 59(4), 863–883 (2011)
Ateshian, G., Humphrey, J.: Continuum mixture models of biological growth and remodeling: past successes and future opportunities. Ann. Rev. Biomed. Eng. 14, 97–111 (2012)
Ateshian, G.A., Costa, K.D., Azeloglu, E.U., Morrison, B., Hung, C.T.: Continuum modeling of biological tissue growth by cell division, and alteration of intracellular osmolytes and extracellular fixed charge density. J. Biomech. Eng. 131(10), 101001 (2009)
Bilby B, Gardner L, S. A.: Continuous distributions of dislocations and the theory of plasticity. In: Proceedings of the 9th International Congress of Applied Mechanics. vol. 9, pp.35-44. University de Brussels (1957)
Bruce, D.M.: Mathematical modelling of the cellular mechanics of plants, Philosophical Transactions of the Royal Society of London. Ser. B Biol. Sci. 358(1437), 1437–1444 (2003)
Chen, Y. C., Hoger, A.: Constitutive functions of elastic materials in finite growth and deformation. In: Advances in Continuum Mechanics and Thermodynamics of Material Behavior. Springer (2000)
Cowin, S.C., Hegedus, D.: Bone remodeling I: theory of adaptive elasticity. J. Elast. 6(3), 313–326 (1976)
Cowin, Stephen C.: Wolff’s law of trabecular architecture at remodeling equilibrium. J. Biomech. Eng. 108, 83–88 (1986)
Tissue growth and remodeling: Annu. Rev. Biomed. Eng. 6, 77–107 (2004)
Eckart, C.: The Thermodynamics of irreversible processes. IV, The theory of elasticity and anelasticity. Phys. Rev. 73(4), 373–382 (1948)
Erlich, A., Moulton, D.E., Goriely, A.: Are homeostatic states stable? dynamical stability in morphoelasticity. Bull. Math. Biol. 81(8), 3219–3244 (2019)
Goriely, A.: The Mathematics and Mechanics of Biological Growth, vol. 45. Springer (2017)
Goriely, A., Neukirch, S.: Mechanics of climbing and attachment in twining plants. Phys. Rev. Lett. 97(18), 184302 (2006)
Goriely, A., Robertson-Tessi, M., Tabor, M., Vandiver, R.: Elastic growth models. In: Mathematical Modelling of Biosystems, pp. 1-44. Springer (2008)
Green, A.E., Naghdi, P.M.: A dynamical theory of interacting continua. Int. J. Eng. Sci. 3(2), 231–241 (1965)
Green, A.E., Naghdi, P.M.: A theory of mixtures. Arch. Ration. Mech. Anal. 24(4), 243–263 (1967)
Green, A.E., Naghdi, P.M.: On thermodynamics and the nature of the second law. Proc. R. Soc. Lond. A. Math. Phys. Sci. 357(1690), 253–270 (1977)
Green, A.E., Naghdi, P.M.: On thermal effects in the theory of rods. Int. J. Solids Struct. 15(11), 829–853 (1979)
Green, A.E., Naghdi, P.M., Wenner, M.L.: On the theory of rods. I. derivations from the three-dimensional equations. Proc. R. Soc. Lond. A. Math. Phys. Sci. 337(1611), 451i483 (1974a)
Green, A.E., Naghdi, P.M., Wenner, M.L.: On the theory of rods II. developments by direct approach. Proc. R. Soc. Lond. A. Math. Phys. Sci. 337(1611), 485i507 (1974b)
Hamant, O., Traas, J.: The mechanics behind plant development. New Phytol. 185(2), 369–385 (2010)
Hsu, F.-H.: The influences of mechanical loads on the form of a growing elastic body. J. Biomech. 1(4), 303–311 (1968)
Humphrey, J.D., Rajagopal, K.R.: A constrained mixture model for growth and remodeling of soft tissues. Math. Model. Methods Appl. Sci. 12(03), 407–430 (2002)
Kröner, E.: General continuum theory of dislocations and intrinsic stresses. Arch. Ration. Mech. Anal. 4(1), 273 (1959)
Kuhl, E.: Growing matter: A review of growth in living systems. J. Mech. Behav. Biomed. Mater. 29, 529–543 (2014)
Lee, E.H.: Elastic-plastic deformation at finite strains. J. Appl. Mech. 36(1), 1–6 (1969)
Leonov, A.: Nonequilibrium thermodynamics and rheology of viscoelastic polymer media. Rheological Acta. 15, 85–98 (1976)
Naghdi, P.M., Rubin, M.B.: Constrained theories of rods. J. Elast. 14(4), 343–361 (1984)
Onat, E.: The notion of state and its implications in thermodynamics of inelastic solids. In: Irreversible Aspects of Continuum Mechanics and Transfer of Physical Characteristics in Moving Fluids, pp. 292–314. Springer (1968)
Rajagopal, K. R., Tao, L.: Mechanics of mixtures, vol. 35. World scientific (1995)
Rodriguez, E.K., Hoger, A., McCulloch, A.D.: Stress-dependent finite growth in soft elastic tissues. J. Biomech. 27(4), 455–467 (1994)
Ross, S., Callaghan, T., Ennos, A., Sheffield, E.: Mechanics and growth form of the mosshylocomium splendens. Ann. Bot. 82(6), 787–793 (1998)
Rubin, M.B.: Hyperbolic heat conduction and the second law. Int. J. Eng. Sci. 30(11), 1665–1676 (1992)
Rubin, M.B.: Plasticity theory formulated in terms of physically based microstructural variables - Part I: Theory. Int. J. Solids Struct. 31(19), 2615–2634 (1994)
Rubin, M.B.: On the treatment of elastic deformation in finite elastic- viscoplastic theory. Int. J. Plast. 12(7), 951–965 (1996)
Rubin, M.B.: An intrinsic formulation for nonlinear elastic rods. Int. J. Solids Struct. 34(31–32), 4191–4212 (1997)
Rubin, M. B.: Cosserat Theories: Shells, Rods and Points. vol. 79 of Solid Mechanics and its Applications. Kluwer ( 2000)
Rubin, M.B.: Physical reasons for abandoning plastic deformation measures in plasticity and viscoplasticity theory. Arch. Mech. 53(4–5), 519–539 (2001)
Rubin, M.B.: Removal of unphysical arbitrariness in constitutive equations for elastically anisotropic nonlinear elastic-viscoplastic solids. Int. J. Eng. Sci. 2012, 38–45 (2012)
Rubin, M.B., Safadi, M.M., Jabareen, M.: A unified theoretical struc- ture for modeling interstitial growth and muscle activation in soft tissues. Int. J. Eng. Sci. 90, 1–26 (2015)
Rubin, M. B.: Continuum Mechanics with Eulerian Formulations of Constitutive Equations, vol. 265. Springer Nature ( 2020)
Rubin, M.B.: Invariance under superposed rigid body motions with constraints. J. Elast. 142(1), 83–88 (2020)
Rubin, M.B.: Modeling orthotropic elastic-inelastic response of growing tissues with application to stresses in arteries. Mech. Soft Mater. 3(1), 1–27 (2021)
Sassi, M., Traas, J.: When biochemistry meets mechanics: A systems view of growth control in plants. Curr. Opin. Plant Biol. 28, 137–143 (2015)
Sciume, G., Shelton, S., Gray, W.G., Miller, C.T., Hussain, F., Ferrari, M., Decuzzi, P., Schrefler, B.: A multiphase model for three-dimensional tumor growth. New J. Phys. 15(1), 015005 (2013)
Skalak, R.: Growth as a finite displacement field. In: Proceedings of the IUTAM symposium on finite elasticity, pp. 347-355. Springer (1981)
Skalak, R., Dasgupta, G., Moss, M., Otten, E., Dullemeijer, P., Vilmann, H.: Analytical description of growth. J. Theor. Biol. 94(3), 555–577 (1982)
Speck, T., Rowe, N.P.: Modelling primary and secondary growth pro- cesses in plants: a summary of the methodology and new data from an early lignophyte. Phil. Trans. R. Soc. Lond. Ser. B. Biol. Sci. 358(1437), 1473–1485 (2003)
Truesdell, C.: Mechanical basis of diffusion. J. Chem. Phys. 37(10), 2336–2344 (1962)
Truesdell, C., Toupin, R.: The Classical Field theories. In: Principles of classical mechanics and field theory, pp. 226-858. Springer (1960)
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The author declares no competing interests.
Appendix. Details of some developments
Appendix. Details of some developments
Using (3), (9), and (47) yields
Then, with the help of (46) and (48) it follows that
Next, using the fact that for the constrained theory \(\mathbf {d}_\alpha\) are orthogonal to \(\mathbf {d}_3\), it can be shown that
where use has been made of the expressions
Finally, substituting (98) into (97) yields the evolution equation (49).
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Rubin, M. An Eulerian formulation of a growing rod in three dimensions with mass accretion. Mech Soft Mater 4, 9 (2022). https://doi.org/10.1007/s42558-022-00047-0
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s42558-022-00047-0