
Abstract
The deep concern towards efficient and green energy has brought to the development of intermediate energy storage system. Electric vehicles (EVs), for example, is an application where the energy storage devices are vital. In EV, the bidirectional DC–DC converter is high in demand due to its nature EV of having two or more separate DC sources. A recent technology called the dual active bridge (DAB) converter has quickly become popular in DC–DC converter thanks to its inherent galvanic isolation via a high-frequency transformer. Furthermore, DAB topology allows for high-efficiency conversion and soft switching adaption. This paper presents the optimization of the phase shift angle controller of DAB using Particle Swarm Optimization (PSO). From the preliminary study, it was found out that the optimization performs well until there are abrupt changes in the system. The system is not able to respond to the reference voltage step change as the traditional one-time execution PSO have local optima entrapped in react to the changes. The paper proposes a reset function to allow PSO to identify that its current optimized value is not optimal anymore. This drives PSO to look for a new optimal value to improve DAB’s overall dynamic performance. Simulation of the modified PSO is done on a 200 kW DAB system with 20 kHz switching frequency is developed in MATLAB/Simulink environment. Simulation has been carried out with the objective to minimize the steady-state error as well as to improve the dynamic performance of the DAB. The DAB performance with the proposed solution is evaluated in terms of steady-state error and transient response by testing the system under various reference voltage and step-change input voltage. The self-excited re-exploration PSO also have been presented as to respond to the reference voltage step change as the basic PSO have local optima entrapped in react to the changes. In order to validate the simulation results, a hardware-in-the-loop (HIL) experimental circuit is built in Typhoon HIL-402 to verify the dynamic response and the steady state performance of the system.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Recently, electric vehicles (EVs) application has become an emerging technology in industry [1, 2]. The high demand of EVs application have carried to the development of intermediate storage system that required bidirectional power flow [3, 4]. Hence, the dual active bridge (DAB) DC–DC converter are most chosen as power conversion platform due to high efficiency, zero voltage switching, galvanic isolation with high frequency transformer and high density [5,6,7].
Basically, the phase shift angle between primary and secondary bridge will determine the magnitude and direction of the power in DAB converter. Therefore, many modulation techniques have been applied in DAB system to control the power transmission such as single phase shift (SPS), extended phase shift (EPS), dual phase shift (DPS) and triple phase shift (TPS) [8]. The difference among the aforementioned methods is the dimension control of the angle, which SPS is one dimension control as just control one angle between primary and secondary part. On the other hand, the two dimension control of EPS required one additional inner phase shift in primary or secondary bridge compared to the single dimension control in SPS. Whereas in DPS and TPS, both modulation have inner phase shift at primary and secondary bridges, which same degree for both inner phase shift in DPS is required and different degree should be applied in TPS modulation technique. In this paper, since the limited range of EV voltage is considered, the simplest and reliable of SPS modulation techniques is chosen as this technique can guarantee better efficiency and extend the soft switching region in DAB converter [3, 6, 8].
As to produce the optimal phase shift angle, many optimization technique have been proposed such as Lagrange multiplier method, mathematical programming methods, genetic algorithm (GA) and Ant Colony Optimization (ACO) [6, 9, 10]. Due to high computational burden and complicated techniques, an offline tuning method by using particle swarm optimization (PSO) is proposed in [6] where the swarm intelligence offers the advantages of reducing the computational load, easy to implement and high convergence speed. However, since the lookup table is required to implement the offline methods, it is not so practical to certain circumstances especially with the presence of disturbance in DAB system. Thus, the online tuning method using PSO algorithm is proposed in this paper to overwhelm the demerits of the offline tuning and offers a promising high robustness system.
2 Operating principle converter
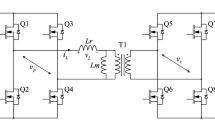
The dual active bridge converter is a kind of DC–DC converter that have bidirectional power flow, galvanic isolation with high frequency transformer, high efficiency and high density features [8, 11, 12]. The DAB is a converter based on two active bridges interconnected through a high frequency transformer as depicted in Fig. 1. It comprise of four IGBT switches at each bridges, where the diagonal switches have same signal and the rest are complement to it. In forward direction, which power is transferring from the primary side to the secondary part, the pulse of S1 and S4 (primary bridge) will lead the pulse of S5 and S8 (secondary bridge) with certain degree of phase shift angle, \( \phi \). In contrast, the secondary pulse will lead the primary pulse in backward direction where the primary bridge demands some power from the secondary part.

Dual active bridge circuit configuration
In DAB, each bridges produced symmetrical square pulses by giving 50% of duty ratio to all switches. Leakage inductance Lk is use to transfer energy from primary to secondary bridges and vice versa. Equation (1) presents the formulae to calculate the Lk. The ratio of high frequency transformer and voltage conversion ratio of DAB can be determine by using Eqs. (2) and (3) respectively. As the SPS modulation is applied, the voltage conversion ratio, k must close to one in ensuring soft switching and high efficiency in DAB [6]. Thus, the operating voltage that was considered in this paper is 250–420 V with range of k is 0.67–1.12.
3 Particle swarm optimization algorithm
Particle swarm optimization is a swarm intelligence that was initiated by Kennedy and Ebehart [13]. The PSO imitate the behavior of birds flock where its intelligence are able to resolve any optimization problems with group communications [14]. The PSO are chosen in this research paper due to its simplicity and efficient approach [15]. Starting with the random initialization value of the phase shift angle (initial position), particles population doing the searching process. In PSO, each particles have potential solution that reflect to the optimization objective, where the minimum steady state error is the objective in this online tuning method.
Then, each particles will update its fitness and the best fitness will be keep as (best position of each particle (Pbest) in every iteration. The global best (Gbest) is the best fitness that was selected among the best particles. The position and velocity of the particles will be updated correspondingly using Eqs. (4) and (5) at the end of each iteration.
where, \( w \) = inertia weight, \( c_{1} \,and \,c_{2} \) = acceleration coefficient, \( r_{1} \,and\, r_{2} \) = random number between 0–1, \( P_{{best_{i} }} \) = personal best position of particle i, \( G_{best} \) = best position of the particles and \( k \) representing the iteration number.
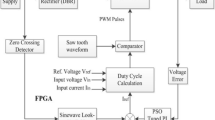
Lastly, the gate signal with optimal phase shift angle will be generated through IGBT switches to be used to run the DAB system accordingly. The flowchart and block diagram are represented in Figs. 2 and 3 respectively. By referring to Fig. 3, the closed loop system shows that the output voltage is being fed to the system and compared with reference voltage. The voltage error is sent into the PSO to determine the minimal steady state and optimized angle for the SPS as online tuning. The proposed method adjusts the \( \phi \) according to the change and generate the performance as desired.

Flowchart of the proposed algorithm

Block diagram of the proposed algorithm
The simulation and experimental works of 20 kHz DAB DC–DC converter was simulated and developed using the parameters as shown in Table 1. For real time verification, the DAB converter is built in Typhoon HIL-402 by using TI F28335 DSP control card as depicted in Fig. 4.

Experimental setup
4 Results and discussion
In this paper, the DAB performance with PSO algorithm was tested under different reference voltage which are 270 V, 300 V, 365 V, 400 V and 420 V. The step change for reference voltage and input voltage has also been established to evaluate the dynamic performance of the DAB system. In SPS modulation, only one angle, \( \phi \) need to be controlled as shown in Fig. 5. The DAB performance in this research paper is analyzed in forward direction only. Hence, the primary pulse will lead the secondary pulse in all conditions with optimal phase shift angle.

Square waveform and leakage inductance current
Figures 6 and 7 demonstrate the basic PSO performance on output voltage waveforms under various voltage reference from simulation in Simulink and HIL validation results respectively. It depicts that all of the tested outputs can be regulated using the basic PSO methods and it shows that the PSO technique is valid to be used in DAB system. The steady state error produced are small, which are less than 4% in DAB as tabulated in Table 2 for both results. The good dynamic response have been proved by using PSO algorithm as the output voltages achieve the settling state around 0.15 s.

Output voltage waveform under various voltage reference (simulation)

Output voltage waveform under various voltage reference (experimental)
For input voltage step change condition, the input voltage steps is changed from 750 to 375 V for 0.07 s. Figure 8 illustrates the output voltage waveform with the input voltage step change. It demonstrates that the controller is able to regulate the output voltage after disturbance occurred at 0.25–0.32 s in simulation work. While in experimental part, the step change is applied at 2–2.07 s as presented in Fig. 9. These results show that the proposed basic PSO controller guarantees fast dynamic response which allow the output voltage to response dynamically when input voltage is reduced in certain periods of time. Table 3 presented the DAB transient response in terms of rise time and settling time to verify the dynamic performance of the proposed controller during the step change of input voltage.

Output voltage waveform with input voltage step change (simulation)

Output voltage waveform with input voltage step change (experimental)
Figure 10a shows the output voltage waveform with reference voltage step change using the proposed traditional one-time execution PSO controller. It illustrates that the phase shift angle is unable to change due to the local optima problem in the PSO, which the output voltage does not follow the desired voltage after step change is applied at 0.2 s. In order to solve this issue, the basic PSO is modified to enable the system to respond to the changes. Figures 10b and 11 shows the simulation and experimental results of the output voltage waveform with reference voltage step change using the proposed self-excited re-exploration PSO controller respectively. The phase shift angle is able to change according to the applied voltage changes at 0.2 s in simulation and 2 s during experimental and generate the desired output voltage. Table 4 presented the DAB dynamic response in terms of steady-state error percentage and settling time to verify the dynamic performance of the proposed controller during the step change of the reference voltage. The DAB dynamic performance is demonstrated where the output voltages respond and changed to the desired voltage in less than 0.15 s after the reference voltage changes are applied in both simulation and experimental results as can be seen in Table 4.

Output voltage waveform with reference voltage step change (simulation). a Using traditional one-time execution PSO b. Using Self-excited re-exploration PSO

Output voltage waveform with reference voltage step change using Self-excited re-exploration PSO (experimental)
5 Conclusion
This paper has proposed the online tuning phase shift angle of DAB DC–DC converter using traditional one-time execution PSO algorithm and using Self-excited re-exploration PSO algorithm. The optimal phase shift angle produced the output voltage with minimal steady state error and good dynamic response for various reference voltages, input voltage step changes and reference voltage step changes. The simulation and experimental results show that the proposed method can produce less than 5% steady state error and have good performance of transient response.
References
Dominguez-Navarro JA, Dufo-Lopez R, Yusta-Loyo JM, Artal-Sevil JS, Bernal-Agustin JL (2019) Electrical power and energy systems design of an electric vehicle fast-charging station with integration of renewable energy and storage systems. Electr Power Energy Syst 105:46–58
Evangelou SA, Rehman-Shaikh MA (2017) Hybrid electric vehicle fuel minimization by DC-DC converter dual-phase-shift control. Control Eng Pract 64:44–60
Rodriguez A, Vazquez A, Lamar DG, Hernando MM, Sebastian J (2015) Different purpose design strategies and techniques to improve the performance of a Dual Active Bridge with phase-shift control. IEEE Trans Power Electron 30(2):790–803
Zhao B, Member S, Yu Q, Sun W (2012) Extended-phase-shift control of isolated bidirectional DC–DC converter for power distribution in microgrid. IEEE Trans Power Electron 27(11):4667–4680
Akagi H, Yamagishi T, Tan NML, Miyazaki Y, Kinouchi SI, Koyama M (2015) Power-loss breakdown of a 750-V 100-kW 20-kHz bidirectional isolated DC-DC converter using SiC-MOSFET/SBD dual modules. IEEE Trans Ind Appl 51(1):420–428
Shi H, Wen H, Hu Y, Member S, Jiang L (2018) Reactive power minimization in bidirectional DC- DC converters using a unified-phasor-based particle swarm optimization. IEEE Trans Power Electron 33(12):10990–11006
Shi Y, Li R, Xue Y, Li H (2015) Optimized operation of current-fed dual active bridge DC-DC converter for PV applications. IEEE Trans Ind Electron 62(11):6986–6995
Zhao B, Song Q, Liu W, Sun Y (2014) Overview of dual-active-bridge isolated bidirectional DC–DC converter for high-frequency-link power-conversion system. IEEE Trans Power Electron 29(8):4091–4106
Zhang H, Tong X, Jin Y (2017) Optimal triple phase shift controller design of isolated bidirectional DC-DC converter based on Ant Colony Algorithm and BP Neural Network. IN: IECON 2017—43rd annual conference on IEEE industrial electronics society, pp 8802–8807
Lei T, Wu C, Liu X (2018) Multi-objective optimization control for the aerospace dual-active bridge power converter. Energies 11:1168
Xiong F, Wu J, Liu Z, Hao L (2018) Current sensorless control for dual active bridge DC–DC converter with estimated load-current feedforward. IEEE Trans Power Electron 33(4):3552–3566
Cho YW, Cha WJ, Kwon JM, Kwon BH (2016) High-efficiency bidirectional DAB inverter using a novel hybrid modulation for stand-alone power generating system with low input voltage. IEEE Trans Power Electron 31(6):4138–4147
Kennedy J, Eberhart R (1995) Particle swarm optimization. In: Proceedings of IEEE international conference on neural networks, vol 4, pp 1942–1948
Eswaran T, Kumar VS (2017) Particle swarm optimization (PSO)-based tuning technique for PI controller for management of a distributed static synchronous compensator (DSTATCOM) for improved dynamic response and power quality. Rev Mex Trastor Aliment 15(2):173–189
Liu Y, Huang S, Huang J, Liang W (2012) A particle swarm optimization-based maximum power point tracking algorithm for PV systems. IEEE Trans Energy Convers 27(4):1027–1035
Acknowledgements
This work is supported by Faculty of Electrical and Electronics Engineering, Universiti Malaysia Pahang, under research Grant RDU1703129.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Ab-Ghani, S., Daniyal, H., Ramlan, N.H. et al. Online PSO-tuned phase shift angle controller for dual active bridge DC–DC converter. SN Appl. Sci. 2, 73 (2020). https://doi.org/10.1007/s42452-019-1782-8
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s42452-019-1782-8