
Abstract
Purpose
Currently, the observational resolution of Earth observation satellites and space telescopes is progressively advancing. Nevertheless, the detrimental effects of vibrations induced by solar panel oscillation, control torque gyroscopic reaction force, and internal noise within satellites seriously affect the observational precision of satellite-mounted precision optical payloads. This paper introduces the application of electromagnetic damping to mitigate optical payload vibrations.
Methods
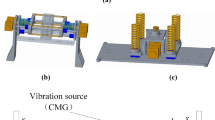
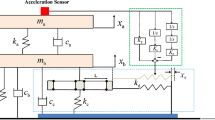
The electromagnetic damping mechanism is investigated through electromagnetic laws, and the magnetic field characteristics of the damper are validated using ANSOFT Maxwell. An optical payload isolation system with Gough–Stewart parallel configuration is constructed with flexible hinges. The Newton–Euler method is employed to formulate the dynamic equation governing the system. Through analyze the external disturbance frequency band, the isolation bandwidth and natural frequency of the system are determined, subsequently guiding the determination of the structural parameters. On this basis, a prototype of optical payload vibration isolation system is designed, and a ground vibration isolation experiment system is established to validate its performance under various excitations.
Results
The electromagnetic damper employed in this article features viscous damping characteristics. The parallel manipulator prototype can effectively attenuate the vibrations over the entire frequency range starting from approximately 1 Hz.
Conclusions
The electromagnetic damper is beneficial to the damping control of the vibration isolation system. The simulation and experimental results both demonstrate the effective vibration isolation capabilities of the system, affirming the feasibility of utilizing the platform for isolating vibrations in space optical payloads. Furthermore, these findings offer valuable theoretical and experimental insights for future space applications.













Similar content being viewed by others

Data availability
The data that support the findings of this study are available from the corresponding authors upon reasonable request.
References
Wu Y, Yu K, Jiao J, Cao D, Chi W, Tang J (2018) Dynamic isotropy design and analysis of a six-dof active micro-vibration isolation manipulator on satellites. Robot Comput Integr Manuf 49:408–425
Jacobs JH, Ross JA, Hadden S, Gonzalez M, Rogers Z, Henderson BK (2004) Miniature vibration isolation system for space applications: phase II. In: Smart structures and materials 2004: industrial and commercial applications of smart structures technologies, vol 5388, SPIE, pp 32–42
Zhang Z, Aglietti GS, Zhou W (2011) Microvibrations induced by a cantilevered wheel assembly with a soft-suspension system. AIAA J 49(5):1067–1079
Zhang J, Guo Z, Zhang Y, Tang L, Guan X (2016) Inner structural vibration isolation method for a single control moment gyroscope. J Sound Vib 361:78–98
Kamesh D, Pandiyan R, Ghosal A (2010) Modeling, design and analysis of low frequency platform for attenuating micro-vibration in spacecraft. J Sound Vib 329(17):3431–3450
Luo Q, Li D, Zhou W, Jiang J, Yang G, Wei X (2013) Dynamic modelling and observation of micro-vibrations generated by a single gimbal control moment gyro. J Sound Vib 332(19):4496–4516
Wei Z, Li D, Luo Q, Jiang J (2015) Performance analysis of a flywheel microvibration isolation platform for spacecraft. J Spacecr Rockets 52(4):1263–1268
Zhou W, Li D (2013) Experimental research on a vibration isolation platform for momentum wheel assembly. J Sound Vib 332(5):1157–1171
Pendergast KJ, Schauwecker CJ (1998) Use of a passive reaction wheel jitter isolation system to meet the advanced X-ray astrophysics facility imaging performance requirements. In: Space telescopes and instruments V, vol 3356, SPIE, pp 1078–1094
Heiberg CJ, Bailey D, Wie B (2000) Precision spacecraft pointing using single-gimbal control moment gyroscopes with disturbance. J Guid Control Dyn 23(1):77–85
Cobb RG, Sullivan JM, Das A, Davis LP, Hyde TT, Davis T, Rahman ZH, Spanos JT (1999) Vibration isolation and suppression system for precision payloads in space. Smart Mater Struct 8(6):798
Luo Q, Li D, Jiang J (2016) Analysis and optimization of microvibration isolation for multiple flywheel systems of spacecraft. AIAA J 54(5):1719–1731
Preumont A, Horodinca M, Romanescu I, De Marneffe B, Avraam M, Deraemaeker A, Bossens F, Hanieh AA (2007) A six-axis single-stage active vibration isolator based on Stewart platform. J Sound Vib 300(3–5):644–661
Chi W, Cao D, Wang D, Tang J, Nie Y, Huang W (2015) Design and experimental study of a vcm-based Stewart parallel mechanism used for active vibration isolation. Energies 8(8):8001–8019
Zhang Y, Li M, Zhang J (2017) Vibration control for rapid attitude stabilization of spacecraft. IEEE Trans Aerosp Electron Syst 53(3):1308–1320
Yi S, Junwei W, Peilun Y, Huayan P, Zhongjie L, Jiheng D, Jun L, Shaorong X, Yan P, Min W (2020) An active hybrid control approach with the fx-rls adaptive algorithm for active-passive isolation structures. Smart Mater Struct 29(10):105005
Tang J, Cao D, Yu T (2019) Decentralized vibration control of a voice coil motor-based Stewart parallel mechanism: simulation and experiments. Proc Inst Mech Eng Part C J Mech Eng Sci 233(1):132–145
Wang M, Fang X, Wang Y, Ding J, Sun Y, Luo J, Pu H (2023) A dual-loop active vibration control technology with an rbf-rls adaptive algorithm. Mech Syst Signal Process 191:110079
Huynh T, Lee D-H, Kim Y-B, A study on robust noninteracting control system design with disturbance feedforward for 6-dof active vibration isolation platform. In: (2022) international symposium on semiconductor manufacturing (ISSM). IEEE 2022, pp 1–6
Lafarga V, Jamshidi R, Rodrigues G, Seiler R, Collette C (2023) Multi-degree-of-freedom active isolation platform for microvibrations. J Spacecr Rockets 1–18
De Marneffe B, Avraam M, Deraemaeker A, Horodinca M, Preumont A (2009) Vibration isolation of precision payloads: a six-axis electromagnetic relaxation isolator. J Guid Control Dyn 32(2):395–401
Chen W, Du C, Tong J, Liu F, Men Y (2023) Dynamics solution and characteristics analysis of a 6-sps passive vibration isolator based on ms-dt-tmm. J Vib Eng Technol 1–20
Singh YP, Ahmad N, Ghosal A (2024) Design of decoupled and dynamically isotropic parallel manipulators considering five degrees-of-freedom. J Mech Robot 16(1):011009
Wu Z, Jing X, Sun B, Li F (2016) A 6dof passive vibration isolator using x-shape supporting structures. J Sound Vib 380:90–111
Hu F, Jing X (2018) A 6-dof passive vibration isolator based on Stewart structure with x-shaped legs. Nonlinear Dyn 91:157–185
Zhou J, Wang K, Xu D, Ouyang H, Li Y (2017) A six degrees-of-freedom vibration isolation platform supported by a hexapod of quasi-zero-stiffness struts. J Vib Acoust 139(3):034502
Wang M, Hu Y, Sun Y, Ding J, Pu H, Yuan S, Zhao J, Peng Y, Xie S, Luo J (2020) An adjustable low-frequency vibration isolation Stewart platform based on electromagnetic negative stiffness. Int J Mech Sci 181:105714
Tang J, Yang Y, Li Y, Cao D (2021) A 6-dof micro-vibration isolation platform based on the quasi-zero-stiffness isolator. Proc Inst Mech Eng Part C J Mech Eng Sci 235(22):6019–6035
Chen W, Jiang J, Liu J, Bai S, Chen W (2013) A passive eddy current damper for vibration suppression of a force sensor. J Phys D Appl Phys 46(7):075001
Chow TL (2006) Introduction to electromagnetic theory: a modern perspective. Jones & Bartlett Learning
Ulaby FT, Ravaioli U (2015) Fundamentals of applied electromagnetics, vol 7. Pearson, Upper Saddle River
Jiang H-Z, Tong Z-Z, He J-F (2011) Dynamic isotropic design of a class of Gough–Stewart parallel manipulators lying on a circular hyperboloid of one sheet. Mech Mach Theory 46(3):358–374
Acknowledgements
The authors gratefully acknowledge the National Natural Science Foundation of China (Grant no. 12102368), the Natural Science Foundation of Sichuan Province (Grant no. 2022NSFSC1961) and the Fundamental Research Funds for the Opening Project of Applied Mechanics and Structure Safety Key Laboratory of Sichuan Province (Grant no. SZZZKT-202202).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendices
Appendix A
Expressions of the matrices in Eq. 28 are presented as follows:
where \({\theta _c}\) means \(\cos \theta\), \({\theta _s}\) means \(\sin \theta\), \({\phi _c},{\phi _s}, {\phi _c}, {\varphi _s}\) have a similar meaning, and
Appendix B
Expressions of the matrices in Eq. 35 are presented as follows:
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Tang, J., Zhao, K., Li, Y. et al. Vibration Suppression of Optical Payload Based on Parallel Manipulator. J. Vib. Eng. Technol. (2024). https://doi.org/10.1007/s42417-024-01314-2
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s42417-024-01314-2