
Abstract
Background
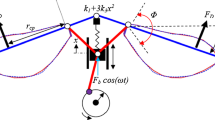
In recent decades, the use of compliant mechanisms has been moved from the context of precision engineering to flapping-wing micro aerial vehicles. One of the features of compliant mechanisms in the field of bio-inspired vehicles is the high speed and high frequency of flapping-wing motion that leads to the effect of the dynamic properties of the mechanism.
Purpose
In this paper, the effect of the vibrational properties of a semi-constrained compliant mechanism on the mechanism’s generated path is discussed.
Methods
The kinematic and dynamic governing equations of the mechanism are extracted and the analytical solution for the desired path is obtained with a vibrational approach. To validate the analytical and numerical results, one of the studied cases was constructed by the smart composite manufacturing method. The experimental results were obtained using a high-speed camera and compared with numerical and analytical solutions.
Results
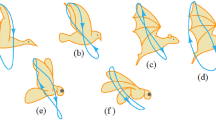
By investigating the results, it was found that by changing the position of the compliant linkage resulting in the frequency variation of the mechanism, flapping-wing paths like peer-shape and 8-type were obtained.
Conclusion
The resulting path error was low and acceptable.













Similar content being viewed by others

Availability of Data and Materials
Not applicable.
References
Ling M, Howell LL, Cao J (2020) Kinetostatic and dynamic modeling of flexure-based compliant mechanisms: a survey. Appl Mech Rev. https://doi.org/10.1115/1.4045679
Howell LL, Midha A (1996) A loop-closure theory for the analysis and synthesis of compliant mechanisms. ASME J Mech Des 118(1):121–125
Lau GK, Chin YW, Goh JTW, Wood RJ (2014) Dipteran-insect-inspired thoracic mechanism with nonlinear stiffness to save inertial power of flapping-wing flight. IEEE Trans Robot 30(5):1187–1197. https://doi.org/10.1109/TRO.2014.2333112
Zhao K, Schmiedeler JP (2016) Using rigid-body mechanism topologies to design path generating compliant mechanisms. J Mech Robot. https://doi.org/10.1115/1.4030623
Saxena A (2005) Synthesis of compliant mechanisms for path generation using genetic algorithm. J Mech Des. https://doi.org/10.1115/1.1899178
Tari H, Su HJ (2011) A complex solution framework for the kinetostatic synthesis of a compliant four-bar mechanism. Mech Mach Theory 46:1137–1152
Lehmann F, Pick S (2007) The aerodynamic benefit of wing–wing interaction depends on stroke trajectory in flapping insect wings. J Exp Biol 210:1362–1377. https://doi.org/10.1242/jeb.02746
Dickinson MH, Farley CT, Full RJ, Koehl MAR, Kram R, Lehman S (2000) How animals move: an integrative view. Science 288(5463):100–106. https://doi.org/10.1126/science.288.5463.100
Lehmann F-O (2008) When wings touch wakes: understanding locomotor force control by wake–wing interference in insect wings. J Exp Biol 211:224–233. https://doi.org/10.1242/jeb.007575
Berg AM, Biewener AA (2010) Wing and body kinematics of takeoff and landing flight in the pigeon (Columba livia). J Exp Biol 213:1651–1658. https://doi.org/10.1242/jeb.038109
McDonald M, Agrawal SK (2010) Desgin of a bio-inspired spherical four-bar mechanism for flapping-wing micro air-vehicle applications. J Mech Robot 2:021012. https://doi.org/10.1115/1.4001460
Jain RK, Majumder S, Dutta A (2012) Multiple path generation by a flexible four-bar mechanism using ionic polymer metal composite. J Intell Mater Syst Struct 23(12):1379–1393. https://doi.org/10.1177/1045389X12447290
Hoover AM, Fearing RS (2008) Fast scale prototyping for folded millirobots. In: IEEE international conference on robotics and automation, Pasadena, CA, USA, May 2008. https://doi.org/10.1109/ROBOT.2008.4543317
Xiao S, Hu K, Huang B, Deng H, Ding X (2021) A review of research on the mechanical design of hoverable flapping wing micro-air vehicles. J Bionic Eng 18:1235–1254. https://doi.org/10.1007/s42235-021-00118-4
Floreano D, Wood RJ (2015) Science, technology and the future of small autonomous drones. Nature 521:460–466
Yue-Qing Yu, Zhou P, Qi-Ping Xu (2019) Kinematic and dynamic analysis of compliant mechanisms considering both lateral and axial deformations of flexural beams. J Mech Eng Sci 233(3):1007–1020. https://doi.org/10.1177/0954406218760956
Sattari Sarebangholi M, Najafi F (2022) Design of a path generating compliant mechanism using a novel rigid-body-replacement method. Meccanica 57:1701–1711. https://doi.org/10.1007/s11012-022-01527-3
Funding
No funding was received for conducting this study.
Author information
Authors and Affiliations
Contributions
This study was conducted by Milad Sattari Sarebangholi under the supervision of Dr. FN. All authors contributed to the study's conception and design. Material preparation, experiment conduction, and analysis were performed by MSS. The first draft of the manuscript was written by MSS and FN reviewed and edited the previous versions of the manuscript. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Sattari Sarebangholi, M., Najafi, F. Kinematic and Dynamic Analysis of a Compliant Mechanism to Generate Different Flapping-Wing Paths Based on Vibration Characteristics. J. Vib. Eng. Technol. 11, 3907–3915 (2023). https://doi.org/10.1007/s42417-022-00791-7
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s42417-022-00791-7