
Abstract
Bioinspired flapping-wing micro-air-vehicles (FWMAVs) have the potential to be useful aerial tools for gathering information in various environments. With recent advancements in manufacturing technologies and better understanding of aerodynamic mechanisms behind of the flapping flight, outdoor flights have become a reality. However, to fully realize the potential of FWMAVs, further improvements are necessary, particularly in terms of stability and robustness under gusty conditions. In this study, the response and control of a tailless two-winged FWMAV under the wind gusts are investigated. Physical experiments are conducted with a one-degree-of-freedom gimbal to focus on effects of wind gusts on the rotational motion of the FWMAV. Proportional-derivative and sliding-mode controls are adopted for the attitude control. Results present that the body angles changed in time and reached approximately 50\({}^\circ\) at the maximum due to the wing gusts. The sliding-mode controller can more effectively control the rotational angle in the presence of disturbances and both the wing speed and changes in wind speed have an impact on the effectiveness of attitude control. These results contribute to the development of of tailless two-winged, single-motor driven FWMAVs in terms of the design of attitude controller and testing apparatus.











Similar content being viewed by others


Data Availability
The data are available from the corresponding author on reasonable request.
References
Floreano, D., & Wood, R. J. (2015). Science, technology and the future of small autonomous drones. Nature, 521, 460–466. https://doi.org/10.1038/nature14542
Phan, H. V., & Park, H. C. (2019). Insect-inspired, tailless, hover-capable flapping-wing robots: Recent progress, challenges, and future directions. Progress in Aerospace Sciences, 111, 100573. https://doi.org/10.1016/j.paerosci.2019.100573
de Croon, G. (2020). Flapping wing drones show off their skills. Science Robotics, 5, eabd0233. https://doi.org/10.1126/scirobotics.abd0233
Xiao, S., Hu, K., Huang, B., Deng, H., & Ding, X. (2021). A review of research on the mechanical design of hoverable flapping wing micro-air vehicles. Journal of Bionic Engineering, 18, 1235–1254. https://doi.org/10.1007/s42235-021-00118-4
Singh, S., Zuber, M., Hamidon, M. N., Mazlan, N., Basri, A. A., & Ahmad, K. A. (2022). Classification of actuation mechanism designs with structural block diagrams for flapping-wing drones: A comprehensive review. Progress in Aerospace Sciences, 132, 100833. https://doi.org/10.1016/j.paerosci.2022.100833
Shyy, W., Aono, H., Kang, C.-K., & Liu, H. (2013). An introduction to flapping wing aerodynamics. Cambridge University Press.
Chin, D. D., & Lentink, D. (2016). Flapping wing aerodynamics: From insects to vertebrates. Journal of Experimental Biology, 219, 920–932. https://doi.org/10.1242/jeb.042317
Ortega-Jimenez, V. M., Badger, M., Wang, H., & Dudley, R. (2016). Into rude air: Hummingbird flight performance in variable aerial environments. Philosophical Transactions of the Royal Society B: Biological Sciences, 371, 20150387. https://doi.org/10.1098/rstb.2015.0387
Keennon, M., Klingebiel, K., & Won, H. (2016). Development of the nano hummingbird: A tailless flapping wing micro air vehicle. In: 50th AIAA Aerospace Sciences Meeting Including the New Horizons Forum and Aerospace Exposition, Nashville, Tennessee, U.S.A. (pp. 1–24).
Karásek, M., Muijres, F. T., De Wagter, C., Remes, B., & de Croon, G. (2018). A tailless aerial robotic flapper reveals that flies use torque coupling in rapid banked turns. Science, 361, 1089–1094. https://doi.org/10.1126/science.aat0350
Phan, H. V., Kang, T., & Park, H. C. (2017). Design and stable flight of a 21 g insect-like tailless flapping wing micro air vehicle with angular rates feedback control. Bioinspiration & Biomimetics, 12, 036006. https://doi.org/10.1088/1748-3190/aa65db
Phan, H. V., Aurecianus, S., Kang, T., & Park, H. C. (2019). KUBeetle-S: An insect-like, tailless, hover-capable robot that can fly with a low-torque control mechanism. International Journal of Micro Air Vehicles, 11, 1–10. https://doi.org/10.1177/1756829319861371
Phan, H. V., Aurecianus, S., Au, T. K. L., Kang, T., & Park, H. C. (2020). Towards the long-endurance flight of an insect-inspired, tailless, two-winged, flapping-Wing flying robot. IEEE Robotics and Automation Letters, 5, 5059–5066. https://doi.org/10.1109/LRA.2020.3005127
Tu, Z., Fei, F., & Deng, X. (2020). Untethered flight of an at-scale dual-motor hummingbird robot with bio-inspired decoupled wings. IEEE Robotics and Automation Letters, 5, 4194–4201. https://doi.org/10.1109/LRA.2020.2974717
Chirarattananon, P., Ma, K. Y., & Wood, R. J. (2014). Adaptive control of a millimeter-scale flapping-wing robot. Bioinspiration & Biomimetics, 9, 025004. https://doi.org/10.1088/1748-3182/9/2/025004
Chirarattananon, P., Ma, K. Y., Cheng, R., & Wood, R. J. (2015). Wind disturbance rejection for an insect-scale flapping-wing robot. In: 2015 IEEE/RSJ international conference on intelligent robots and systems, Hamburg, Germany. https://doi.org/10.1109/IROS.2015.7353355.
Chirarattananon, P., Chen, Y., Helbling, E. F., Ma, K. Y., Cheng, R., & Wood, R. J. (2017). Dynamics and flight control of a flapping-Wing robotic insect in the presence of wind gusts. Interface Focus, 7, 20160080. https://doi.org/10.1098/rsfs.2016.0080
Aurecianus, S., Phan, H. V., Kang, T., & Park, H. C. (2020). Longitudinal mode model-based controller design for tailless flapping wing robot with loop shaping compensator. Bioinspiration & Biomimetics, 15, 056004. https://doi.org/10.1088/1748-3190/ab9514
Olejnik, D. A., Wang, S., Dupeyroux, J., Stroobants, S., Karásek, M., de Wagter, C., & de Croon, G. (2022). An experimental study of wind resistance and power consumption in MAVs with a low-speed multi-fan wind system. In: 2022 International Conference on Robotics and Automation, Philadelphia, U.S.A.. https://doi.org/10.1109/ICRA46639.2022.9811834.
Olejnik, D. A., Muijres, F. T., Karásek, M., Honfi Camilo, L., de Wagter, C., & de Croon, G. (2022). Flying into the wind: Insects and bio-inspired micro-air-vehicles with a wing-stroke dihedral steer passively into wind-gusts. Frontiers in Robotics and AI, 9, 820363. https://doi.org/10.3389/frobt.2022.820363
Lee, J., Ryu, S., & Kim, H. J. (2020). Stable flight of a flapping-wing micro air vehicle under wind disturbance. IEEE Robotics and Automation Letters, 5, 5685–5692. https://doi.org/10.1109/LRA.2020.3009064
Wang, S., Olejnik, D., de Wagter, C., van Oudheusden, B., de Croon, G., & Hamaza, S. (2022). Battle the wind: Improving flight stability of a flapping wing micro air vehicle under wind disturbance with onboard thermistor-based airflow sensing. IEEE Robotics and Automation Letters, 7, 9605–9612. https://doi.org/10.1109/LRA.2022.3190609
Wang, C., Wang, S., de Croon, G., & Hamaza, S. (2022). Embodied airflow sensing for improved in-gust flight of flapping wing MAVs. Frontiers in Robotics and AI, 9, 1060933. https://doi.org/10.3389/frobt.2022.1060933
Mou, J., Zhang, W., Zheng, K., Wang, Y., & Wu, C. (2022). More detailed disturbance measurement and active disturbance rejection altitude control for a flapping wing robot under internal and external disturbances. Journal of Bionic Engineering, 19, 1722–1735. https://doi.org/10.1007/s42235-022-00236-7
Fuller, S., Yu, Z., & Talwekar, Y. P. (2022). A gyroscope-free visual-inertial flight control and wind sensing system for 10-mg robots. Science Robotics, 7, eabq8184. https://doi.org/10.1126/scirobotics.abq8184
Phan, H. V., & Park, H. C. (2020). Mechanisms of collision recovery in flying beetles and flapping-wing robots. Science, 370, 1214–1219. https://doi.org/10.1126/science.abd3285
Ma, K. Y., Chirarattananon, P., Fuller, S. B., & Wood, R. J. (2013). Controlled flight of a biologically inspired, insect-scale robot. Science, 340, 603–607. https://doi.org/10.1126/science.1231806
Nonami, K., & Den, K. (1994). Sliding model control. Corona Publishing Co. Ltd (in Japanese).
Bluman, J. E., Kang, C.-K., & Shtessel, Y. (2018). Control of a flapping-wing micro air vehicle: Sliding-mode approach. Journal of Guidance, Control, and Dynamics, 41, 1223–1226. https://doi.org/10.2514/1.G003160
Madgwick, S. (2010). An efficient orientation filter for inertial and inertial/magnetic sensor arrays. Report x-io and University of Bristol (UK), 25, 113–118.
Verboom, J. L., Tijmons, S., de Wagter, C., Remes, B., Babuska, R., & de Croon, G. (2015). Attitude and altitude estimation and control on board a flapping wing micro air vehicle. In: 2015 IEEE international conference on robotics and automation, Seattle, U.S.A. (pp. 5846–5851).
Franklin, J. A. (2002). Dynamics, control, and flying qualities of V/STOL aircraft. The American Institute of Aeronautics and Astronautics, Inc.
Cheng, B., & Deng, X. (2011). Translational and rotational damping of flapping flight and its dynamics and stability at hovering. IEEE Transactions on Robotics, 27, 849–864. https://doi.org/10.1109/TRO.2011.2156170
Acknowledgements
This work was partly supported by Japan Society for the Promotion of Science KAKENHI under Grant No. JP22H01397. CK was partly supported by the National Science Foundation under Grant No. CMMI-1761618.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of Interest
The authors have no competing interests to declare that relevant to the content of this article.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary Information
Below is the link to the electronic supplementary material.
Supplementary file 1 (mp4 40835 KB)
Appendices
Appendix 1: Design of Wing Planform
Effects of wing planform on the lift and the lift-to-power ratio of the FWMAV were investigated. Figure 12 showed three tested wing planforms that had wing areas of 1,757 mm\(^2\) and the length of leading edge of the wing, R of 75 mm, 2,000 mm\(^2\) and R = 80 mm, and 2,258 mm\(^2\) and R = 85 mm, respectively. The range of wing size and area was chosen based on that of FWMAVs having similar weight to that of the robot used in this study. Figure 13 presented the experimental setup of simultaneous measurement of lift and lift-to-power ratio. The lift force generated by the FWMAV was measured by a 6-axis force transducer (Nano 17, ATI Industrial Automation Inc.) and the input power was measured by a two-channel oscilloscope (TBS1000C, Tekronix Inc.) and a resistor (2 Ohm, tolerance = ±1%). An external power supply (PW8-3AQP, Texio Corp.) was used to drive the wings. The flapping frequency varied from 13 Hz to 22 Hz. Figure 14 showed the experimental results and the wing with the highest power efficiency (R = 80 mm and wing area of 2,000 mm\(^2\)) at the robot’s weight. Thus, the wing with R of 80 mm and wing area of 2,000 mm\(^2\) were adopted for all the experiments of this study.

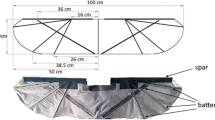
Schematics of tested wing planforms

Experimental apparatus of simultaneous lift and power measurements

Results of lift-to-power and lift for three tested wings
Appendix 2: Relationship Between Control Command and Control Torque
The relationship between the control commands and the control torques generated by the FWMAV was explored. Figures 15 and 16 show the experimental results. For the pitch control, changing the control input \(\theta _{S}\) from -60\({}^\circ\) to +60\({}^\circ\), the measured \(M_{Y,B}\) varied from \(-\)0.83 N\(\cdot\)mm to 1.18 N\(\cdot\)mm, while for the roll control, changing the control input \(\phi _{S}\) from -60\({}^\circ\) to +60\({}^\circ\), the measured \(M_{X,B}\) varied from \(-\)1.07 N\(\cdot\)mm to 0.69 N\(\cdot\)mm. It was also seen that torque was generated even when the command to the servomotor was zero in both pitch and roll directions. This was because the vehicle was made by hand and not perfectly symmetrical. From the experimental data (Figs. 15 and 16), a linear approximation of the relationship (Eqs. 3 and 4) between torque and servomotor input was obtained for the pitch and roll motion.

Experimental results of the relationship between pitch torque (\(\tau _{\theta }\)) and pitch command (\(\theta _S\))

Experimental results of the relationship between roll torque (\(\tau _{\phi }\)) and roll command (\(\phi _S\))
Appendix 3: Effects of Filters on Body Angle Estimation of FWMAV
The impact of filtering on the accuracy of the body angle estimation in the FWMAV was discussed. Measurements were performed with the FWMAV mounted on a gimbal with one degree of freedom (1-DOF) that rotated only either in the pitch direction or the roll direction. The attitudes estimated by the inertial measurement unit (MPU9250) attached to the FWMAV were compared with the attitudes tracked by the digital camera (RX10VII, Sony). Here, the Kalman filter, Madgwick filter, and Complementary filter were considered to estimate body rotational angles from the internal sensors together with the moving average filter. Figure 17 illustrates the schematics and time-histories of pitch (\(\theta\)) and roll (\(\phi\)) angles of FWMAV. For the pitch angle control, the RMSE of three filters with the actual angles from the camera were 15.71\({}^\circ\) (Kalman filter), 3.30\({}^\circ\) (Madgwick filter), and 19.81\({}^\circ\) (complementary filter), while for the roll angle control, the RMSE of three filters with the actual angles from the camera were 8.21\({}^\circ\) (Kalman filter), 2.66\({}^\circ\) (Madgwick filter), and 12.43\({}^\circ\) (complementary filter). Therefore, a filter combining the Madgwick filter with the moving average filter was employed to estimate body rotational angles for the attitude control in this study.

Schematics of experimental setup of measurement of body angle of 1-DOF gimbal and comparison of three filters of estimated values: a pitch angle (\(\theta\)) and b roll angle (\(\phi\))
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Shimura, K., Aono, H. & Kang, Ck. An Experimental Study on Response and Control of a Flapping-Wing Aerial Robot Under Wind Gusts. J Bionic Eng 21, 209–223 (2024). https://doi.org/10.1007/s42235-023-00426-x
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s42235-023-00426-x