
Abstract
Purpose
Vibration control of pipes conveying fluid at high pressure and pulsating velocity has been a key area of research for many engineering applications. The variation of velocity of flowing fluid with time leads to parametric instabilities in the transverse motion of the pipe. The objective of the present work is to effectively control the parametric instabilities of flexible pipes conveying pulsating fluid (sinusoidal velocity profile) by applying shape memory alloy (SMA) based actuation.
Methods
The Equivalent Coefficient of Thermal Expansion (ECTE) based SMA model has been employed to assimilate the actuator effect as part of the governing equation. Bolotin’s approach has been used to investigate the principal primary and secondary instability regions due to pulsating flow in a pipe with and without the actuator.
Results
It is observed that the extent of the instability region increases with a rise in flow velocity of the fluid, however, the inclusion of SMA wire actuator causes a significant reduction in the region of principal primaryinstability. The effect of other parameters like fluid-pipe mass ratio, and mean component of fluid velocity on both primary and secondary instabilities of the system is also addressed.
Conclusion
SMA actuators could be effectively used for the vibration control of pipes containing pulsating flows, as long as the harmonic component of the fluctuation of the flow is within a specific limit.











Similar content being viewed by others

Abbreviations
- \(d_a\) :
-
Diameter of the SMA wire actuator
- e :
-
Offset of the actuators from the axis of the pipe
- F :
-
Transverse force between the pipe wall and the fluid
- \(f_a\) :
-
Force developed by the SMA wire actuator
- h :
-
Convective heat transfer coefficient
- \(i_a\) :
-
Input current supplied to the SMA wire actuator
- \(l_p\) :
-
Length of the pipe
- \(M_p\) :
-
Bending moment acting on the pipe
- P :
-
Pressure of the fluid measured above the atmosphere
- \(Q_p\) :
-
Transverse shear force in the pipe
- \(q_p\) :
-
Shear stress on the internal surface of the pipe
- \(R_a\) :
-
Resistance per unit length of SMA wire actuator
- \(S_p\) :
-
Internal surface area of the pipe
- \(T_a\) :
-
Temperature of SMA wire actuator
- t :
-
Time
- \(\gamma\) :
-
Pipe flow parameter
- \(T_p\) :
-
Time period of periodic solution
- \(U_f\) :
-
Axial flow velocity of the fluid
- u :
-
Non-dimensional axial flow velocity
- x :
-
Distance from the left support along the length of the pipe
- z :
-
Transverse displacement of the pipe
- \(A_a\) :
-
Cross-sectional area of SMA wire actuator
- \(A_f\) :
-
Cross-sectional area of flow
- \(C_a\) :
-
Specific heat of SMA wire actuator
- \(E_a\) :
-
Elastic modulus of SMA wire actuator
- \(E_pI_p\) :
-
Flexural rigidity of the pipe
- T :
-
Tension force in the pipe wall
- \(I_a\) :
-
Amplitude of input current in SMA wire actuator
- \(m_a\) :
-
Mass per unit length of SMA wire actuator
- \(m_f\) :
-
Mass of the fluid per unit length of pipe
- \(m_p\) :
-
Mass of the pipe per unit length
- \(S_a\) :
-
Surface area of the unit length of the SMA wire actuator
- \(T_\circ\) :
-
Ambient temperature
- \(u_\circ\) :
-
Mean component of the pulsating flow
- \(\mathcal {F}\) :
-
Non-dimensional force developed in the SMA wire actuator
- w :
-
Non-dimensional transverse displacement of the pipe
- \(\alpha _a\) :
-
Effective coefficient of thermal expansion (ECTE) of SMA wire actuator
- \(\beta\) :
-
Fluid-pipe mass ratio parameter
- \(\varepsilon _a\) :
-
Total axial strain in SMA wire actuator
- \(\theta\) :
-
Slope of the pipe at some point
- \(\lambda\) :
-
Excitation parameter
- \(\mu\) :
-
Non-dimensional distance from the left support along the length of the pipe
- \(\rho _a\) :
-
Density of SMA wire actuator
- \(\sigma _a\) :
-
Stress induced in SMA wire actuator
- \(\tau\) :
-
Non-dimensional time
- \(\omega\) :
-
Frequency of harmonic fluctuation of the fluid velocity
- \(\mathrm \Omega\) :
-
Non-dimensional frequency of pulsating flow
References
Gu Z, Bai C, Zhang H (2019) Stochastic finite-element modeling and dynamic characteristics analysis of pipe-conveying fluid. J Vib Eng Technol 7:251–259. https://doi.org/10.1007/s42417-019-00118-z
Abdelrahman WG, Al-Garni AZ, Abdelmaksoud SI, Abdallah A (2018) Effect of piezoelectric patch size and material on active vibration control of wind turbine blades. J Vib Eng Technol 6:155–161. https://doi.org/10.1007/s42417-018-0020-9
Chopra I, Sirohi J (2013) Smart structures theory. Cambridge Aerospace Series (Cambridge University Press). https://doi.org/10.1017/CBO9781139025164
Shen X, Chen Y, Wang J, Li J, Chang L, Sun Y (2019) Design, experiment and verification of resonant frequency-tunable vibration isolator based on annular metal rubbers and shape memory alloy actuators. J Vib Eng Technol 7:277–289. https://doi.org/10.1007/s42417-019-00109-0
Jia Y, Li L, Wang C, Lu Z, Zhang R (2019) A novel shape memory alloy damping inerter for vibration mitigation. Smart Mater Struct. https://doi.org/10.1088/1361-665x/ab3dc8
Zareie S, Issa AS, Seethaler RJ, Zabihollah A (2020) Recent advances in the applications of shape memory alloys in civil infrastructures: a review. Structures 27:1535. https://doi.org/10.1016/j.istruc.2020.05.058
Suhail R, Amato G, McCrum D (2020) Active and passive confinement of shape modified low strength concrete columns using SMA and FRP systems. Compos Struct. https://doi.org/10.1016/j.compstruct.2020.112649
Mao Z, Xu Z, Wang Q (2020) Shape memory alloy actuator with active cooling device and deflectable winglet application. Smart Mater Struct. https://doi.org/10.1088/1361-665x/aba9ab
Kalra S, Bhattacharya B, Munjal BS (2018) Development of shape memory alloy actuator integrated flexible poly-ether-ether-ketone antenna with simultaneous beam steering and shaping ability. J Intell Mater Syst Struct 29(18):3634. https://doi.org/10.1177/1045389X18798946
Srivastava R, Sharma AK, Hait AK, Bhattacharya B (2018) Design and development of active bimorph structure for deployable space application, in active and passive smart structures and integrated systems XII, vol. 10595, ed. by A. Erturk. Int Soc Optics Photonics (SPIE), vol. 10595, pp. 818 – 829. https://doi.org/10.1117/12.2296547
Fonseca LM, Savi MA (2020) Nonlinear dynamics of an autonomous robot with deformable origami wheels. Int J Nonlin Mech. https://doi.org/10.1016/j.ijnonlinmec.2020.103533
Huang X, Kumar K, Jawed MK, Mohammadi Nasab A, Ye Z, Shan W, Majidi C (2019) Highly dynamic shape memory alloy actuator for fast moving soft robots. Adv Mater Technol 4(4):1800540. https://doi.org/10.1002/admt.201800540
Meng L, Kang R, Gan D, Chen G, Chen L, Branson DT, Dai JS (2020) A mechanically intelligent crawling robot driven by shape memory alloy and compliant bistable mechanism. J Mech Robotics 12(6):061005. https://doi.org/10.1115/1.4046837
Ishii H, Ting KL (2004) SMA actuated compliant bistable mechanisms. Mechatronics 14(4):421. https://doi.org/10.1016/S0957-4158(03)00068-0
Mekaouche A, Chapelle F, Balandraud X (2018) A compliant mechanism with variable stiffness achieved by rotary actuators and shape-memory alloy. Meccanica 53:2555. https://doi.org/10.1007/s11012-018-0844-0
Banerjee A, Bhattacharya B, Mallik AK (2010) Optimum discrete location of shape memory alloy wire for enhanced actuation of a compliant link. J Mech Des 132(2). https://doi.org/10.1115/1.4000643
Abitha H, Kavitha V, Gomathi B, Ramachandran B (2020) A recent investigation on shape memory alloys and polymers based materials on bio artificial implants-hip and knee joint. Mater Today Proc. https://doi.org/10.1016/j.matpr.2020.07.711
Stoeckel D, Pelton A, Duerig T (2009) Self-expanding Nitinol stents for the treatment of vascular disease, in shape memory alloys for biomedical applications. In: Yoneyama T, Miyazaki T (eds). Woodhead Publishing Series in Biomaterials. Woodhead Publishing, pp. 237 – 256. https://doi.org/10.1533/9781845695248.2.237
Bhattacharya B, Patel OP (2011) A new shape memory alloy based smart encoder for sensing of direction and angular motion. Sens Transducers 130(7):103
Jain AK, Sharma AK, Khandekar S, Bhattacharya B (2020) Shape memory alloy-based sensor for two-phase flow detection. IEEE Sens J 20(23):14209. https://doi.org/10.1109/JSEN.2020.3008191
Bhaskar J, Sharma AK, Bhattacharya B, Adhikari S (2020) A review on shape memory alloy reinforced polymer composite materials and structures. Smart Mater Struct. https://doi.org/10.1088/1361-665x/ab8836
Lee SH, Kim SW (2020) Self-sensing-based deflection control of carbon fibre-reinforced polymer (CFRP)-based shape memory alloy hybrid composite beams. Compos Struct. https://doi.org/10.1016/j.compstruct.2020.112544
Païdoussis M, Issid N (1974) Dynamic stability of pipes conveying fluid. J Sound Vib 33(3):267. https://doi.org/10.1016/S0022-460X(74)80002-7
Singh K, Mallik A (1979) Parametric instabilities of a periodically supported pipe conveying fluid. J Sound Vib 62(3):379. https://doi.org/10.1016/0022-460X(79)90631-X
Singh K, Mallik A (1978) Use of dynamic absorbers to control parametric instabilities of a pipe. J Appl Mech 45(4):949. https://doi.org/10.1115/1.3424454
Mallik A, Narayanan S (1980) Control of parametric instabilities of a periodically supported pipe with dynamic absorber, In: Proceedings of the International Conference on Recent Advances in Structural Dynamics (University of Southampton, UK), pp. 661–676
Mallik AK, Kulkarni SB, Ram KS (1984) Parametric instability of a periodically supported pipe without and with vibration absorbers. J Appl Mech 51(1):159. https://doi.org/10.1115/1.3167561
Yau CH, Bajaj A, Nwokah O (1995) Active control of chaotic vibration in a constrained flexible pipe conveying fluid. J Fluids Struct 9(1):99. https://doi.org/10.1006/jfls.1995.1005
Lin YH, Chu CL (1996) Active flutter control of a cantilever tube conveying fluid using piezoelectric actuators. J Sound Vib 196(1):97. https://doi.org/10.1006/jsvi.1996.0470
Tsai YK, Lin YH (1997) Adaptive modal vibration control of a fluid-conveying cantilever pipe. J Fluids Struct 11(5):535. https://doi.org/10.1006/jfls.1997.0092
Tsai XY, Chen LW (2002) Dynamic stability of a shape memory alloy wire reinforced composite beam. Compos Struct 56(3):235. https://doi.org/10.1016/S0263-8223(02)00008-9
Baz A, Imam K, McCoy J (1990) Active vibration control of flexible beams using shape memory actuators. J Sound Vib 140(3):437. https://doi.org/10.1016/0022-460X(90)90760-W
Williams K, Chu G, Bernhard R (2002) Adaptive-passive absorbers using shape-memory alloys. J Sound Vib 249(5):835. https://doi.org/10.1006/jsvi.2000.3496
Rustighi E, Brennan MJ, Mace BR (2004) A shape memory alloy adaptive tuned vibration absorber: design and implementation. Smart Mater Struct 14(1):19. https://doi.org/10.1088/0964-1726/14/1/002
Baz A, Poh S, Ro J, Gilheany J (1995) Control of the natural frequencies of nitinol-reinforced composite beams. J Sound Vib 185(1):171. https://doi.org/10.1006/jsvi.1994.0370
Dauksher R, Patterson Z, Majidi C (2021) Characterization and analysis of a flexural shape memory alloy actuator. Actuators. https://doi.org/10.3390/act10080202
Utter B (2019) Enhancing the actuation frequency of shape memory alloy wire by vibration-enhanced cooling. J Intelligent Mate Syst Struc 30(20):3177. https://doi.org/10.1177/1045389X19880015
Shin DD, Mohanchandra KP, Carman GP (2004) High frequency actuation of thin film NiTi. Sens Actuators A: Phys 111(2):166. https://doi.org/10.1016/j.sna.2003.09.026
Song SH, Lee JY, Rodrigue H, Choi IS, Kang YJ, Ahn SH (2016) 35 Hz shape memory alloy actuator with bending-twisting mode. Sci Rep 6:21118. https://doi.org/10.1038/srep21118
Dana A, Vollach S, Shilo D (2021) Use the force: review of high-rate actuation of shape memory alloys, use the force: review of high-rate actuation of shape memory alloys. Actuators 10(7):140
Turner TL, Patel HD (2007) Analysis of SMA hybrid composite structures in MSC Nastran and ABAQUS. J Intell Mater Syst Struct 18(5):435. https://doi.org/10.1177/1045389X06066699
Bolotin VV (1964) The dynamic stability of elastic systems, the dynamic stability of elastic systems (Holden-Day). San Francisco. https://doi.org/10.1119/1.1972245
Mallik AK, Bhattacharjee JK (2005) Stability problems in applied mechanics. Alpha Science International Ltd., New Delhi, India
Turner TL (2001) Experimental validation of a thermoelastic model for SMA hybrid composites, in Smart Structures and Materials 2001: Modeling, Signal Processing, and Control in Smart Structures, vol. 4326, ed. by V.S. Rao. Int Soc Optics Photonics (SPIE). 4326: 208 – 219. https://doi.org/10.1117/12.436475
Acknowledgements
The authors acknowledge partial support of this research from Indian Space Research Organisation (ISRO)-Space Technology Cell; Sponsored project STC/ME/2017183.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of Interest
On behalf of all authors, the corresponding author states that there is no conflict of interest.
Ethical Approval
The authors would like to thank the following SPIE publication for permitting the use of a figure in the manuscript. Travis L. Turner, “Experimental validation of a thermoelastic model for SMA hybrid composites,” Proc. SPIE 4326, Smart Structures and Materials 2001: Modeling, Signal Processing, and Control in Smart Structures, (21 August 2001).
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary Information
Below is the link to the electronic supplementary material.
Appendix A Equation of Motion
Appendix A Equation of Motion
The assumptions made while deriving the governing equation are as follows:
-
1.
The flow is assumed to be of plug type.
-
2.
The fluid is assumed to be incompressible.
-
3.
The effect of pressurization of flowing fluid is neglected.
-
4.
The damping and axial tension in the pipe are neglected.
-
5.
The motion of the pipe is assumed to be in one plane (X-Z).
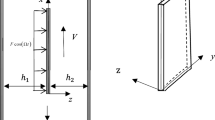
Consider a pinned-pinned flexible pipe conveying pulsating fluid, as shown in Fig. 1 including the SMA actuators. Let \(l_p\) be the pipe length, \(E_pI_p\) is flexural rigidity, \(S_p\) is internal surface area per unit length, and \(m_f\) is mass per unit length of the pipe conveying fluid of mass per unit length \(m_p\). Let \(U_f\) be the axial flow velocity, \(A_f\) is the cross-sectional flow area, and P is the fluid gauge pressure.
Assume a small element of the pipe of length dx and the corresponding element of the enclosed fluid, as shown in Figs. 12 and 13, for deriving the governing equation of motion. Let \(q_p\) is the shear stress on the internal surface of the pipe, F is the transverse force between pipe wall and fluid, \(Q_p\) is the transverse shear force in the pipe, \(f_a\) is the force induced in the SMA actuator, which in turn induces a compressive load in the pipe and \(M_p\) is the bending moment.
For the fluid element shown in Fig. 12, force balance in X and Z directions, respectively, gives

Free body diagram of fluid element
For the pipe element shown in Fig. 13, force balance in X and Z directions gives (z-component of \(f_a\) is neglected since the case is assumed to be of small vibrations)

Free body diagram of pipe element
The relation between \(Q_p\) and \(M_p\) is given by
Combining the Eqs. 33, 35 and 36, we get
Adding the Eqs. 32 and 34 gives
Integrating Eq. 38 from x to \({l_p}\), we get
The pressure at x = \(l_p\) is zero, since it is measured above atmosphere and the fluid discharges to atmosphere, i.e. \({(PA_f}_{x=l_p}=0\) in the above equation and \({\left( T\right) }_{x=l_p}=-f_a\) (compressive)
or
Substituting Eq. 41 into Eq. 37, we get the equation of motion as
Simplifying the above equation further, the governing equation becomes
The equation of motion is converted to the non-dimensional form using the non-dimensional terms given in Sect. 2.1. Thus, we finally obtain
Rights and permissions
Springer Nature or its licensor holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Shaik, N.H., Sharma, A.K. & Bhattacharya, B. Effect of Shape Memory Alloy Actuation on Parametric Instability in Pipes Conveying Pulsating Fluid. J. Vib. Eng. Technol. 11, 3003–3016 (2023). https://doi.org/10.1007/s42417-022-00726-2
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s42417-022-00726-2