
Abstract
The rotatory motion of a rigid body having a cavity, close to a spherical form, filled with a viscous incompressible fluid around its center of mass is investigated. It is assumed that the Reynolds number has a modest restricted value due to the high velocity of the fluid. The body rotates under the influence of a viscous fluid besides the action of a gyrostatic moment vector about the principal axes of the body. The governing system of motion is derived and the averaging of the Cauchy problem of this system is analyzed. The analytic solutions are derived through several transformations and plotted graphically to demonstrate the positive influence of the physical body's parameters on the motion. The stability of these solutions is examined through their phase plane diagrams. In light of the efficiency of a gyrostatic moment on the considered motion, new results of this work have been achieved. The significance of this work stems from its numerous uses in everyday life, particularly in vehicles that hold liquids, such as aircraft, submarines, ships, and other vehicles. Moreover, it is also used in engineering applications that depend on the gyroscopic theory.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
The rigid body problem is looked at, as one of the most attractive problems in mechanics, which is attributable to its practical significance for engineering applications especially for the rotational motion of a spacecraft, as well as for the theory of the gyro motion. Such problems are considered very complex to deal with because they involve both the difficulties of both rigid body and hydrodynamics problems. The outgrowth and generalization of the present problem are the problems of rigid bodies that contain a fluid in a cavity. Zhukovskii [1] in 1885, was the first scientist to deal with such a topic. In the general context, he investigated the body's motion when the cavity is entirely filled with an ideal incompressible fluid. He supposed that the impact of the fluid on the rigid body can be considered as a connection with another body, in which the centers of masses of the fluid and body coincide with each other. The stability of a steady body with a uniform vortices flow in a cavity was investigated firstly in [2] and [3]. Numerous works have investigated the stability of the rigid body motion in which it contains cavities filled with a fluid such as [4,5,6,7].
The problems relating to the rigid bodies dynamics contain cavities filled with a viscous fluid are considered that have difficulties than those of an ideal fluid. Chernous’ko F. L. in [8, 9] has made a major contribution to deal with such problems. The impact of the fluid on the parametric motion is reduced to the existence of specific moments of disturbance for a fictitious body in the Euler’s dynamic equations. Several works were dedicated to investigate the passive motion of bodies with cavities fully filled with a viscous fluid, e.g., [10,11,12]. In [10], the author studied the stabilizing influence of the liquid on the motion of an anti-symmetric top with cavities entirely filled with incompressible liquid. In [11], the governing equations describing the evolution of the rotational motion of asymmetric rigid body containing cavities completely filled with a viscous fluid are derived; while in [12], the case of inertia's ellipsoid that is close to the rotation's ellipsoid is considered. In [13, 14], the stabilization of the rotary motion of a symmetrical gyrostat, having a spherical cavity contains a viscous fluid, about the dynamic symmetry axis is studied. The approach presented in [9] has been revisited in [15] to simulate the dynamics of a rigid body that has a cavity fully filled with high-viscosity viscous fluid.
The motion of satellite under the action only of gravitational torques was investigated in [16], while the formulas for the light pressure torque, acting on a body (without cavity with fluid) bounded by a surface of revolution were obtained in [17]. The rotatory relative motion of a satellite contains a viscous fluid in a cavity to the center of mass is studied in [18,19,20,21,22]. This motion is examined under the effectiveness of various forces and moments such that; gravitational moment due to the gravity force [18], or in the presence of light pressure force only [19], or both of them [20]. The asymptotic study of the controlling system is carried out applying the modified averaging method [16, 23, 24] and the numerical results are analyzed. Moreover, some special cases of the motion of a symmetric satellite are investigated in [20].
Recently, the averaging technique [25] is used in [26] and [27] to obtain the analytic solutions of a charged rigid body under the action of a full vector of a gyro moment and electromagnetic field, respectively. Some interesting applications related with the restoring moment, perturbing moments and others are presented. The motion of an electromagnetic gyrostat is examined in [28], in which the Euler’s angles are estimated analytically and numerically to determine the orientation of the gyro at any instant. On the other hand, the case of irrational frequencies for the rigid body motion is investigated in [29] using the small parameter method of Poincaré [25], while the method of Krylov–Bogoliubov–Mitropolski [25] is used in [30,31,32] to get the asymptotic solutions of the system of motion for the rigid body motion when the ellipsoids of inertia and rotation are closed with each other, in which its generalization is found in [33]. The method of immersed boundary projection is used in [34] to deal with the interaction between the fluid and the rigid bodies. This technique is subedited in affixed reference system on the body under the influence of flow structure. Therefore, the controlling system of motion can be solved without duplicates, efficiently and accurately. In [35], the author examined the free rotational motion of a whole body which contains a spherical cavity completely filled with an incompressible fluid flow. The existence of the solutions whether global weak or local strong is demonstrated. Moreover, the fluid's velocity as well as the angular velocity, with respect to the outer solid material, converges to zero when time tends to infinity.
In [36], the authors provided a well-developed method for the motion of rigid bodies under the influence of perturbation moments according to the physical nature of these bodies. They covered the fundamentals of rigid body dynamics as well as the averaging method, in which a thorough approach based on the averaging procedure that can be used to bodies with any inertia ellipsoids can be used. In a weakly resistant medium, a heavy asymmetric rigid body contains a spherical cavity filled with a high-viscosity liquid rapidly rotating around a fixed point is studied in [37]. Two problems of the dynamical motion of a symmetric rigid body having a cavity fully filled with a viscous liquid in the presence of a movable mass were investigated in [38]. The combined action of this fluid and the mass on the body’s motion is examined.
The fast dynamical motion of asymmetric satellite in relation to its center of mass is investigated in [39]. It is considered that the satellite having a hollow filled with viscous fluid with low Reynolds numbers and the motion under the action of gravitational and external resistance torques. Low Reynolds numbers are used to investigate rotatory motion of a dynamically asymmetric satellite around its center of mass is investigated in [40], in which the author considered a spherical cavity filled with viscous liquid in the satellite. A numerical investigation of a solid body's vector change in kinetic momentum was carried out. The inertial movements of a coupled system made up of a rigid body with a hollow completely filled with a viscous liquid are studied in [41]. The authors focus on the asymptotic behavior of these movements over time.
The steady rotational motion of a spherical solid particle in a spherical cavity filled with nanofluid is investigated in [42]. It is considered that, the rotation of both the particle and the cavity around an axis that connecting their centers with two distinct angular velocities. The behavior of a vibrating solid cylinder in an incompressible fluid inside a rectangular cavity is studied experimentally in [43], while the mechanical motion of a solid body having an inner chamber filled with an incompressible viscous fluid is considered in [44]. The authors identified the system's equilibria, and investigated the various stability characteristics. Recently, the influence of the gyro torques on the motion of a symmetric body containing a viscous fluid inside a spherical cavity is examined in [45] analytically and numerically, in which the obtained analytical solutions generalized one of the examined problems in [38].
In this paper, we will examine the motion of a rigid body around its center of mass in which it has a cavity, close to a spherical case, filled with a viscous incompressible fluid. The Reynolds number is supposed to be small owing to the velocity of the fluid is sufficiently high. The body rotates under a force that acting from the side of viscous fluid and in the presence of a gyrostatic torque to achieve new results of the field of interest. The governing system of regulating motion is derived and the averaging of the Cauchy problem of this system is analyzed. The asymptotic and numerical results are obtained and plotted graphically to evaluate the considered motion of the body completely at any instant. The achieved results are considered a new contribution of the gyrostatic motion field and a generalization of some previous works.
Mathematical Construction of the Problem
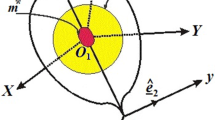
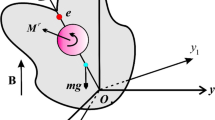
In this part, we consider the motion of a rigid body, contains a spherical cavity of radius \(a\) filled with a viscous incompressible fluid with density \(\rho\), relative to the center of principal inertia's axes. Let \(Oxyz\) is a fixed coordinate system with an origin \(O\), \(Ox_{1} y_{1} z_{1}\) is a mobile coordinate one (connected rigidly with the body) coincides with the inertia's center of the system, \(\underline{\omega }\) is the angular velocity vector in which \(p,q,r\) denote their projections on the principal axes of the body,\(I \equiv (I_{1} ,I_{2} ,I_{3} )\) is the inertia's principal moments tensor and \(P\) refers to a constant tensor for the case of the spherical cavity, see Fig. 1.

The dynamical model
The components of \(P\) are reefed with \(P_{ij} = P_{0} \delta_{ij} ;\,\,\,P_{0} > 0\), in which \(\delta_{ij}\) is a Kronecker delta symbol and \(P_{0} = {{8\,\pi \,a^{7} } \mathord{\left/ {\vphantom {{8\,\pi \,a^{7} } {525}}} \right. \kern-\nulldelimiterspace} {525}}\) for the case of a spherical cavity. It is considered that the body rotates in the presence of a gyrostatic moment vector \(\underline{\ell } \equiv (\ell_{1} ,\ell_{2} ,\ell_{3} )\) in which the first two projections equal null while the third one \(\ell_{3}\) goes away from zero. Therefore, Euler's dynamic equations take the form [46, 47]
where dot denotes the derivative with respect to time \(t\), \(M\) represents the moment of all external forces affecting on the body due to the viscosity of the fluid in the cavity and it is defined as [48]
Here,
and \(\nu\) is the kinematic viscosity.
Substituting (2) and (3) into (1) to get the equations of motion (EOM) in the form
Now, we investigate the case when the values of the principal moments of inertia that are close to each other i.e.,
where \(0 < \varepsilon < < 1\) represents a small parameter.
In addition, we assume that
According to (5) and (6), we can write
Taking into account (5)–(7), the EOM according to the slow time parameter \(\tau = \varepsilon \;t\) can be rewritten in the form
besides the initial conditions
It clear that the previous system (8) consisting of three first-order nonlinear differential equations with respect to the slow time parameter \(\tau\). An inspection of the third one reveals that \(r\) is a slow variable due to the small parameter \(\varepsilon\) and the frequency of that system depending on \(r\). Therefore, the perturbations \(\varepsilon \,f_{p} ,\varepsilon \,f_{q}\) and \(\varepsilon \,f_{r}\) take the form
It is worthwhile to mention that, the moment of friction forces due to the existence of the viscous fluid inside the cavity is very minimal.
Methodology of the Research
Now, we are going to obtain the solution of system (8) for \(\varepsilon = 0\) when \(\,{1 \mathord{\left/ {\vphantom {1 \nu }} \right. \kern-\nulldelimiterspace} \nu } = 0\) in accordance with the used approach in [22]. Therefore, system (8) becomes
Integration of the third equation in (11) yields \(r = r_{0}\), then substituting into the first two equations, differentiating the first equation with respect to \(\tau\) and using the second one to obtain
where
The previous equation represents a simple harmonic equation that can be solved using Laplace transformation with the above initial conditions (9) to obtain
which can be replicated in the equivalent form below
where \(h = \sqrt {p_{0}^{2} + ({{\dot{p}_{0} } \mathord{\left/ {\vphantom {{\dot{p}_{0} } \varpi }} \right. \kern-\nulldelimiterspace} \varpi })^{2} }\) and \(\phi\) are the amplitude and the phase of (12).
Differentiating the first equation of (14) with respect to \(\tau\) and then using the first equation of system (8) to get
Making use of the third equation in (8) and (14) to obtain
Now, we are going to solve Eqs. (15) and (16) with respect to \(\dot{h}\) and \(\dot{\phi }\). Therefore, equating the coefficients of \(\sin \phi\) and \(\cos \phi\) in both sides of (15), and then averaging the resulted equation to obtain [49]
where
Averaging of Eq. (16) gives
where
Now, we are going to transform the variables \(h\) and \(r\) to other ones \(x\) and \(y\) according to the following substitutions
Here, \(x\) and \(y\) are considered slow variables. According to (17), (19), and (21) besides its first derivative, we obtain
It is worthy to mention that, the procedure for solving system (22) is close to that described in the previous article [22]. Based on the previous two equations in (22), one writes
Inserting new parameters \(z,\tilde{\alpha }\) and \(\tilde{\beta }\) according to the following forms
into (23) to obtain
Let us consider the transformation \(\theta = \ln \,y\), therefore \(\frac{dz}{{d\theta }} = y\frac{dz}{{dy}}\) and according to (25), one obtains the following nonhomogeneous linear equation
The general solution of the previous equation has the form
where \(C_{1}\) is the integration constant.
According to the above transformations, we can rewrite Eq. (27) in terms of the slow variables \(x\) and \(y\) as
Substituting (28) into the second equation of (22), we get
which can be integrated using separation of variables [22].
Discussion of the Results
This section outlines on the graphical representations of the system of Eqs. (14) for the solutions \(p\) and \(q\), for the integration of the second equation in (17), and the equations of system (22).
Figures 2 and 3 describe the time history of the first two components of the angular velocity in which they are calculated when \(I_{1} = 15\,kg.m^{2} ,\,\,I_{2} = 12\,kg.m^{2} ,\,\,J_{0} = 10\,kg.m^{2} ,\,\,\varepsilon = 0.01,\,\,r_{0} = 0.01\,rad.s^{ - 1}\) and \(p_{0} = 0.01\,rad.s^{ - 1}\). An inspection of these figures shows that we have obtained progressive waves when \(\ell_{3}\) has the values \((0.3,\,0.4,\,0.5)\,kg.m^{2} .s^{ - 1}\). The amplitudes of the waves plotted in these figures decrease with the increasing of \(\ell_{3}\), as predicted from Eq. (14). Moreover, the wavelength of the waves increases when \(\ell_{3}\) growing up and the motion is stable. The phase plane plots of the angular velocity components \(p\) and \(q\) are presented in the parts of Fig. 3 to reveal the stability of the behavior of these components at \(\ell_{3} = 0.3 \, kg.m^{2} .s^{ - 1}\) (Fig. 4).

The time history of the angular velocity component \(p\) when \(\ell_{3} = { (0}{\text{.3, 0}}{.4, 0}{\text{.5)}}\)

The time history of the angular velocity component \(q\) when \(\ell_{3} = { (0}{\text{.3, 0}}{.4, 0}{\text{.5)}}\)

The phase plane of the components \(p\) and \(q\) at \(\ell_{3} = 0.3\)
The presented curves in Figs. 5 and 6 describe the behavior of \(\phi\) when \(\ell_{3}\) and \(r_{0}\) have different values, respectively. These figures are calculated according to the general data \(I_{1} = 15\, \, kg.m^{2} ,I_{2} = 12 \, \,kg.m^{2} ,J_{0} = 10\, \, kg.m^{2} ,\varepsilon = 0.01\) and \(p_{0} = 0.01\, \, rad.s^{ - 1}\) in which they are plotted when \(r_{0} = 0.01 \, \,rad.s^{ - 1} ,\, \, \ell_{3} = (0.3,\,\,0.4,\,\,0.5) \, kg.m^{2} .s^{ - 1}\) and \(\ell_{3} = 0.5 \, kg.m^{2} .s^{ - 1} ,\) \(r_{0} = (0.01, \, 0.02, \, 0.03) \, rad.s^{ - 1}\), respectively.

The variation of \(\phi\) via time \(t\) when \(\ell_{3} = (0.3,\,\,0.4,\,\,0.5)\) and \(r_{0} = 0.01\)

The time variation of \(\phi\) at \(r_{0} = (0.01,\,\,0.02,\,\,0.03)\) and \(\ell_{3} = 0.5\)
It is worthwhile to mention that \(\phi\) increases gradually when time goes on and we have different straight lines corresponding to the different data of \(\ell_{3}\) and \(r_{0}\) as expected from the second equation in (17).
Figures 7, 8, and 9, 10 reveal the variation of \(x\) and \(y\) via time \(t\). These figures are generally calculated at the values \(I_{1} = 1 \, kg.m^{2} ,I_{2} = 0.2 \, kg.m^{2} ,\)\(J_{0} = 0.1 \, kg.m^{2} ,\nu = 0.001 \, m^{2} .s^{ - 1} ,\)\(\varepsilon = 0.01,\)\(r_{0} = 0.01 \, rad.s^{ - 1} ,\)\(\ell_{3} = 0.5 \, kg.m^{2} .s^{ - 1} ,\beta = 81 \, kg.m^{2} ,\) and especially when \(\alpha = { 47}{\text{.2305}}\,,\) \(\eta = (2600, \, 2800, \, 3000)\) and \(\alpha = 47.2305,\)\(\eta = (28.88, \, 31.11, \, 33.33)\) for Figs. 7, 8, and 9, 10, respectively. In additions Figs. 9 and 10 are calculated also at \(\rho = (0.2,0.3,0.4) \, kg.m^{ - 3}\).

The time history of \(x\) at \(p_{0} = (0.013,0.014,0.015)\)

The time history of \(y\) when \(p_{0} = (0.013,0.014,0.015)\)

The change of \(x\) with time \(t\) at \(\rho = (0.2,0.3,0.4)\)

The variation of \(y\) against time \(t\) at \(\rho = (0.2,0.3,0.4)\)
To visualize the motion according to the initial value \(p_{0}\) and the density \(\rho\) of the fluid, Figs. 7, 8, and 9, 10 are represented graphically. A closer look at these graphs reveals that the different values of \(p_{0}\) and \(\rho\) have a good impact on the motion of the body. The curves included in these figures obey carefully to the equations of (22) when \(\ell_{3}\) has a constant value. It should be noted that Figs. 7, 8, 9, 10 can be considered as a generalization of those which were obtained in [22], since when the value of the third compound is absent, and taking into account the same values for the different parameters of the body in [22], one can get the same results directly. Therefore, parts of Fig. 11 have been drawn as special case when \(\ell_{3} = 0\) and \(p_{0} = 0.013\) besides the other data mentioned above to represent the time histories of \(x\) and \(y\).

The variation of \(x(t)\) and \(y(t)\) at \(\ell_{3} = 0\) and \(p_{0} = 0.013\)
Conclusion
The motion of a rigid body contains a viscous incompressible fluid in a cavity; with a very minimal Reynolds number about its center of mass has been examined. The motion of the body is considered under the influence of a gyrostatic moment vector and a viscous fluid force. The governing system of motion is derived and the averaging of the Cauchy problem of this system is analyzed. Some transformations are used to reduce the required parameters to their suitable form. Therefore, the analytic solutions have been achieved and drawn in some plots to show the time behavior of the solution at any instant. Moreover, the phase plane diagrams have been plotted to reveal the stability of these solutions. The acquired new results are regarded as a generalization of those obtained in [21] and [22] for the case of absence gyrostatic moment, in which the attained results and the presented figures support this this statement. The significant impact of the various parameters of the body like the axial angular velocity, density of the fluid, inertia's principal moments, and gyrostatic moment is evident from the presented graphs. The importance of the gained results is due to its applications in life such as in submarines, ships, and for different applications that used the gyroscopic theory.
Data Availability
No data, models, or code were generated or used during the study.
References
Zhukovskii NY (1885) On the motion of a rigid body with cavities filled with a homogeneous liquid drop. Zh Fiz-Khim Obs Physics 17:81–113
Greenhill AG (1880) On the general motion of a liquid ellipsoid. Proc Camb Phil Soc 4:4–14
Hough SS (1895) The oscillations of a rotating ellipsoidal shell containing fluid. Phil Trans R Soc Lond A 186:469–506
Sobolev SL (1960) On the motion of a symmetric top with a cavity filled with a fluid. Zh Prikl Mech Tekhn Fiz 3:20–55
Moiseyev NN, Rumyantsev VV (1968) Dynamic stability of bodies containing fluid. Springer, New York
Kostyuchenko AG, Shkalikov AA, Yurkin MY (1998) On the stability of a top with a cavity filled with a viscous fluid. Funct Anal Apll 32:100–113
Kopachevsky ND, Krein SG (2000) Operator approach to linear problems of hydrodynamics, vol 2. Birkh_auser Verlag, Basel-Boston-Berlin
Chernou’sko FL (1968) The motion of rigid body with cavities filled with a viscous fluid. Vychisl.Tsentr AN SSSR, Moscow (in Russian)
Chernousko FL (1972) Motion of a rigid body with cavities containing a viscous fluid. NASA Technical Translations
Smirnova EP (1974) Stabilization of free rotation of an asymmetric top with cavities completely filled with a liquid. J Appl Math Mech 38(6):931–935
Vil’ke VG (1993) Evolution of the motion of symmetric rigid body with spherical cavity filled with viscous liquid, Vestn Mosk Univ, Ser. 1: Mat. Mekh., No. 1, pp 71–76
Baranova EY, Vil’ke VG (2013) Evolution of motion of a rigid body with a fixed point and an ellipsoidal cavity filled with a viscous liquid. Mosc Univ Mech Bull 68:15–20
Bezglasnyi SP (2017) Global stabilization of gyrostat program motion with cavity filled with viscous fluid. Proceedings of the World Congress on Engineering, vol I, London
Bezglasnyi SP (2017) Stabilizing the programmed motion of a rigid body with a cavity filled with viscous fluid. J Comput Syst Sci Int 56(5):749–758
Ramodanov SM, Sidorenko VV (2017) Dynamics of a rigid body with an ellipsoidal cavity filled with viscous fluid. Int J Non Linear Mech 95:42–46
Chernous’ko FL (1963) On the motion of a satellite about its center of mass under the action of gravitational moments. J Appl Math Mech 27(3):708–722
Karymov AA (1964) Stability of rotational motion of a geometrically symmetrical artificial satellite of the sun in the field of light pressure forces. J Appl Math Mech 28(5):1117–1125
Akulenko LD, Leshchenko DD, Rachinskaya AL (2007) Evolution of rotations of a satellite with cavity filled with viscous liquid. Mekh Tverd Tela 37:126–139
Akulenko LD, Leshchenko DD, Rachinskaya AL (2008) Rotations of a satellite with cavity filled with viscous liquid under the action of a moment of light pressure forces. Mekh Tverd Tela 38:95–110
Akulenko LD, Zinkevich YS, Leshchenko DD, Rachinskaya AL (2011) Rapid rotations of a satellite with a cavity filled with viscous fluid under the action of moments of gravity and light pressure forces. Cosm Res 49(5):440–451
Akulenko LD, Leshchenko DD, Palii E (2019) Motion of a nearly dynamical spherical rigid body with cavity filled with a viscous fluid. Mech Math Methods 1:17–24 (In Russian)
Akulenko L, Leshchenko D, Paly K (2021) Perturbed rotational motions of a spheroid with cavity filled with a viscous fluid. Proc Instit Mech Eng C. 235(20):4833–4837. https://doi.org/10.1177/0954406220941545
Volosov VM, Morgunov BI (1971) Averaging methods in the theory of Non-Linear oscillatory systems. Mosk Gos Univcow, Moscow
Akulenko LD (2002) Higher-order averaging schemes in systems with fast and slow phases. J Appl Math Mech 66(2):153–163
Nayfeh AH (2004) Perturbations methods. WILEY-VCH Verlag GmbH and Co. KGaA, Weinheim
Amer TS, Abady IM (2018) On the motion of a gyro in the presence of a Newtonian force field and applied moments. Math Mech Solids 23(9):1263–1273
Galal AA, Amer TS, El-Kafly H, Amer WS (2020) The asymptotic solutions of the governing system of a charged symmetric body under the influence of external torques. Results Phys 18:103160
El-Sabaa FM, Amer TS, Sallam AA, Abady IM (2022) Modeling and analysis of the nonlinear rotatory motion of an electromagnetic gyrostat. Alex Eng J 61(2):1625–1641
Amer TS, Galal AA, Abady IM, El-Kafly HF (2021) The dynamical motion of a gyrostat for the irrational frequency case. Appl Math Model 89:1235–1267
Amer TS, Ismail AI, Amer WS (2012) Application of the Krylov-Bogoliubov-Mitropolski technique for a rotating heavy solid under the influence of a gyrostatic moment. J Aerosp Eng 25(3):421–430
Amer TS, Abady IM (2017) On the application of KBM method for the 3-D motion of asymmetric rigid body. Nonlinear Dyn 89:1591–1609
Amer TS, Farag AM, Amer WS (2020) The dynamical motion of a rigid body for the case of ellipsoid inertia close to ellipsoid of rotation. Mech Res Commun 108:103583
Amer TS, El-Kafly HF, Galal AA (2021) The 3D motion of a charged solid body using the asymptotic technique of KBM. Alex Eng J 60:5655–5673
Lin T, Hsieh H, Tsai H (2021) A target-fixed immersed-boundary formulation for rigid bodies interacting with fluid flow. J Comput Phys 429:110003
Mazzone G (2021) On the free rotations of rigid bodies with a liquid-filled gap. J Math Anal Appl 496(2):124826
Chernousko FL, Akulenko LD, Leshchenko DD (2017) Evolution of motions of a rigid body about its center of mass. Springer, Cham
Akulenko LD, Leshchenko DD (1982) Rapid rotation of a heavy gyrostat about a fixed point in a resisting medium. Soviet Appl Mech 18(7):660–665
Leshchenko DD, Sallam SN (1992) Some problems on the motion of a rigid body with internal degrees of freedom. Intern Appl Mech 28(8):524–528
Leshchenko D, Akulenko L, Rachinskaya A, Shchetinina Y (2015) Rotational motion of a satellite with viscous fluid under the action of the external resistance torque. Math Eng Sci Aerosp 6(3):383–391
Rachinskaya AL (2015) Motion of a solid body with cavity filled with viscous liquid. Cosm Res 53(6):476–480
Disser K, Galdi GP, Mazzone G, Zunino P (2016) Inertial motions of a rigid body with a cavity filled with a viscous liquid. Arch Rational Mech Anal 221:487–526
Sherief HH, Faltas MS, El-Sapa S (2019) Axisymmetric creeping motion caused by a spherical particle in a micropolar fluid within a nonconcentric spherical cavity. Eur J Mech B Fluids 77:211–220
Schipitsyn VD, Kozlov VG (2018) Oscillatory and steady dynamics of a cylindrical body near the border of vibrating cavity filled with liquid. Microgravity Sci Technol 30(1):103–112
Mazzone G, Prüss J, Simonett G (2019) A maximal regularity approach to the study of motion of a rigid body with a fluid-filled cavity. J Math Fluid Mech 21(3):1–20
Amer WS, Farag AM, Abady IM (2021) Asymptotic analysis and numerical solutions for the rigid body containing a viscous liquid in cavity in the presence of gyrostatic moment. Arch Appl Mech 91:3889–3902
Ismail AI, Amer TS (2002) The fast spinning motion of a rigid body in the presence of a gyrostatic momentum. Acta Mech 154:31–46
Amer TS (2017) On the dynamical motion of a gyro in the presence of external forces. Adv Mech Eng 9(2):1–13
Chernous’ko FL (1965) Motion of a solid with cavities filled with a viscous fluid at small Reynolds numbers. Zh Vychisl Mat i Mat Fiz 5(6):1049–1070
Bogoliubov NN, Mitropolsky YA (1961) Asymptotic methods in the theory of nonlinear oscillations. Gordon and Breach Science, New York
Funding
Open access funding provided by The Science, Technology & Innovation Funding Authority (STDF) in cooperation with The Egyptian Knowledge Bank (EKB). This research received no specific grant from any funding agency in the public, commercial, or not-for-profit sectors.
Author information
Authors and Affiliations
Contributions
AMF: Methodology, Validation, Data curation, Visualization, Writing, Reviewing. TSA: Methodology, Conceptualization, Visualization, Reviewing, Editing. IMA: Investigation, Data curation, Validation, Writing—original draft, Reviewing.
Corresponding author
Ethics declarations
Conflict of Interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Farag, A.M., Amer, T.S. & Abady, I.M. Modeling and Analyzing the Dynamical Motion of a Rigid Body with a Spherical Cavity. J. Vib. Eng. Technol. 10, 1637–1645 (2022). https://doi.org/10.1007/s42417-022-00470-7
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s42417-022-00470-7