
Abstract
Loess landslides in mountainous regions of the Ili Valley have resulted in numerous casualties as well as huge economic losses. However, the characteristics and driving mechanisms of surface deformation related to loess landslides in mountainous areas remain unclear, thus limiting our ability to identify, monitor, and warn populations of potential catastrophic events. This study was conducted in a typical mountainous area of the Ili Valley, where landslides have been documented by field investigations, unmanned aerial vehicle images, and light detection and ranging data. With ascending and descending Sentinel‑1 time series synthetic aperture radar images, acquired using the small baselines subset method, surface deformation was observed for the period from October 2014 to October 2021, and loess landslides were concurrently mapped to delineate hazardous areas. Using the methods of this study, we were able to identify 74.4% of previously documented landslides. Additionally, we observed a seasonal time-series of deformation that had a time delay of less than one month and was responsive to rainfall. Our analysis of the characteristics and driving mechanisms of creeping landslides in the Ili Valley led to the compilation of a new inventory of active slopes that will offer valuable guidance for land managers tasked with implementing disaster prevention measures.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Landslides are one of the most common geological hazards in the natural environment, and they can result in significant casualties and property damage (Hu et al. 2020). Landslides are generally recognized to be a physical response to external triggers, such as heavy rainfall, an earthquake or anthropogenic activity (road construction, deforestation, cultivation, or mining activities) (Jones et al. 2021, Zou et al. 2022). Catastrophic landslides typically do not occur instantaneously. Rather, typical warning signs such as minor movements tend to be exhibited before the major landslide eventually takes place (Eker and Aydın 2021). Monitoring surface deformation helps provide a better understanding of the spatiotemporal characteristics and driving factors of landslides (Kang et al. 2021). Additionally, detecting and characterizing surface deformation assists in the development of appropriate strategies to reduce landslide risk and to improve the planning, design, and implementation of prevention and mitigation measures (Hu et al. 2019).
Interferometric Synthetic Aperture Radar (InSAR) compares the phase information of two or more radar images to obtain deformation information about the target area’s surface, including subsidence, uplift, and sliding (Gabriel et al. 1989). SAR sensor platforms, which continue to accumulate SAR images and are regularly updated, have come a long way. Corresponding time series InSAR analysis methods are also advancing, such as persistent scatterers InSAR (Ferretti et al. 2001) and Small Baselines Subset (SBAS) InSAR (Berardino et al. 2002). These methods have been developed to enable the large-scale detection of active slopes and the identification of potential landslides based on dense measurements taken both in space and time. These methods also allow for the assessment of the deformation state and dynamic development trends of active slopes over years or decades (Eker and Aydın 2021). As a result, InSAR is widely used for slope stability monitoring and mapping within the scientific community (Bekaert et al. 2020, Hu et al. 2020, Shi et al. 2022, Tang et al. 2023). Unmanned Aerial Vehicle (UAV) photogrammetry, which is equipped with various sensors such as optics and Light Detection and Ranging (LiDAR), enables high-precision observations in small areas from a few acres up to a couple square kilometers. Consequently, it can serve as an effective auxiliary tool for interpreting InSAR results and conducting on-site investigations (Xu et al. 2021).
The Ili Valley in the western Tianshan Mountains is characterized by complex geological structures and a fragile ecological environment. It represents a typical loess deposit in Xinjiang Region of Central Asia, with thicknesses ranging from meters to hundreds of meters (Zeng et al. 2021). Loess landslides in this region are easily and frequently triggered by geological or meteorological events and have led to casualties and property damages, such as during events in 2002, 2004, and 2012, which were caused by snowmelt (Zhuang et al. 2018), heavy precipitation (Wang et al. 2019), and freeze-thaw cycles (Liu et al. 2017), respectively. To address this situation, the Xinjiang Provincial Authority has utilized optical remote sensing, UAV photogrammetry, and field investigations to conduct a comprehensive survey of geological disasters and to compile a list of landslides in the Ili Valley. Significant efforts have also been dedicated to monitoring and understanding the mechanisms of landslides. Post-disaster analysis of the Piliqing River landslide indicated that freeze-thaw cycles were the primary triggers for landslide occurrence (Zhuang et al. 2018). Research has highlighted that the Zeketai landslide was induced by initial seismic activity followed by heavy rainfall (Yanjun et al. 2022). Physical experiments have also revealed the relationship between the tensile strength of loess in the Ili Valley and its moisture content (Zheng et al. 2022). However, the spatiotemporal characteristics of many other unstable regions in the Ili Valley remain unclear due to limitations of remote sensing technologies and in-situ observations. Additionally, the creeping stage of deformation has yet to be described for numerous landslides due to a lack of time-series observations (Kang et al. 2021). Therefore, to gain a comprehensive understanding of the spatial distribution characteristics and development trends of potential loess landslides in the Ili Valley, it will be crucial to integrate various technical tools and datasets, including InSAR, etc., to analyze the kinematics of loess landslides and to assess the impact of meteorological and hydrological factors on their stability.
In this study, we first applied time-series InSAR analysis with both ascending and descending Sentinel‑1 SAR images taken from October 2014 to 2021 to identify active loess landslides. Then, documented landslide datasets, which included field observations, UAV images, and LiDAR data, were integrated to map the morphological and kinematic characteristics of three typical landslides. We also used statistical methods and the wavelet analysis tool to analyze the correlation between rainfall and deformation. Specifically, this paper aimed to (i) document the spatial distribution of active slopes in the Ili Valley, (ii) interpret and analyze the general characteristics and potential drivers of creeping landslides in a loess-covered mountainous area and (iii) discuss the limitations and applicability of our findings in loess landslide monitoring for the broader Ili Valley and similar environments.
2 Study Area
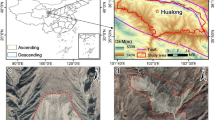
A typical area in the Ili Valley was selected for this study (Fig. 1a). Situated in the western section of China’s Tianshan Mountains, the Ili Valley experiences a temperate continental climate and is marked by a multi-year average temperature of 10.4 °C and a multi-year average precipitation of 417.6 mm (Zhuang et al. 2021). The precipitation is more characteristic in the mountainous areas than the valley. It mainly concentrates between April and September and accounts for 85% of the total annual precipitation. The Loess strata is mainly distributed in the foothills on both sides of the valley, with the upper boundary reaching the forest line and the lower boundary connecting with the valley plain (Wang et al. 2019). The strata thickness is usually in the range of 5–30 m, though in some individual locations it goes up to 100 m. Loess landslides in this region are distributed along both sides of the valleys (Zhuang et al. 2018). The altitude of the study area varies significantly from 935 to 3747 meters, and the middle of the valley is flat due to intensive human activity; it has mostly been reclaimed as arable land. The Normalized Difference Vegetation Index (NDVI) reveals a substantial level of vegetation coverage (Fig. 1b).

a The location and topography of the study area. The dotted red lines represent the mid-low mountain area boundaries (loess sediment boundaries), the black dashed frame outline is the study area, the red points represent the location of documented landslides, and the black polygons outline the extent of UAV and airborne LiDAR data; b NDVI of the study area was generated using a Sentinel‑2 optical image acquired on 15 June 2021; c Location of the study area, the yellow area represents the loess deposition region; d The extent of ascending and descending Sentinel‑1 tracks
3 Data and Methodology
In this study, we used the SBAS technique for the multi-temporal InSAR analysis to identify active landslides. Then, the information collected on catalogued landslides was used to map the characteristics of three typical landslides. In addition, the periodic characteristics of the deformation and the response of the deformation to rainfall were analysed using the wavelet analysis tool (Fig. 2).

Schematic flowchart. LS Least Squares, LOS Line of Sight direction, CWT Continuous Wavelet Transform, XWT Cross Wavelet Transforms
3.1 Data Acquisition
The monitoring of creeping landslides in the Ili Valley was conducted using two stacks of C‑Band Sentinel‑1 SAR images. The Sentinel‑1 data, sourced from the European Space Agency (ESA), was obtained through the Alaska Satellite Facility (ASF) website, accessible at https://search.asf.alaska.edu/#/. High-resolution UAV imagery and point cloud data acquired via airborne LiDAR for some documented landslides was used to aid in the interpretation and evaluation of the results of InSAR. The basic parameters of these datasets are summarized in Table 1. The ALOS World 3D 30 m Digital Elevation Model (DEM), released in 2015 by the Japan Aerospace Exploration Agency (JAXA) (Takaku et al. 2016), was used for the co-registration of SAR images, the generation of differential interferograms, and for geocoding. The DEM is accessible at http://www.eore.jaxa.jp/ALOS/en/aw3d30/. In addition, daily precipitation data from meteorological station Y5214 (longitude: 83.74°, latitude: 43.46°), which is located within the study area, was obtained for this analysis.
3.2 Time-series InSAR Analysis
We used the open-source GPU accelerated interferometric SAR processing software (Yu et al. 2019) to process the Sentinel‑1 dataset. For Sentinel‑1 IW images acquired in Terrain Observation with Progressive Scans (TOPS) mode, there was a separation of doppler centroid frequencies between bursts. Sub-pixel image co-registration (< 0.001 pixel) was needed to avoid phase discontinuities (Rodriguez-Cassola et al. 2015). Afterward, a 4:1 multi-looking operation was applied to the co-registered Single Look Complex (SLC) images in both the range and the azimuth directions to suppress noise. Before February 2017, the revisit cycle was 24 days, with some images missing. To ensure complete and evenly distributed interferogram connections, each image was connected to the next two images to generate differential interferogram pairs. The spatial baseline threshold was 100 meters, and no threshold was set for the temporal baseline. The generated pairs of differential interferograms had a temporal baseline of 12–72 days (Fig. 3). Subsequently, the noise in the differential interferograms was further suppressed by adaptive filtering using the Distributed Scatterer Interferometry Processing (DSIPro) software (Jiang et al. 2015). Next, an amplitude dispersion threshold of 0.6 was chosen, and any pixels larger than this threshold were eliminated. Then the phase stability was analyzed, and all pixels with a temporal coherence greater than 0.3 were retained (Shi et al. 2022). Lastly, the continuous phases in the spatial and temporal dimensions were retrieved by performing 3D phase unwrapping (Hooper et al. 2007). We evaluated the coherence of the interferogram stack based on the coherence map and selected a pixel that maintained high coherence, exhibiting stable and non-deforming behaviour, over all interferogram pairs as the reference point.

Normal baseline formed by (a) the Sentinel‑1 dataset for the ascending (T12) and (b) the Sentinel‑1 dataset for the descending (T165)
In this context, \(\varnothing _{\mathrm{unw}}\) represents the unwrapped phase, while \(\varnothing _{\mathrm{orb}}\), \(\varnothing _{\mathrm{topo}}\), \(\varnothing _{\mathrm{disp}}\), \(\varnothing _{\mathrm{aps}}\), and \(\varnothing _{n}\) correspond to the phase contributions from orbital phase ramps, DEM error, surface deformation, atmospheric and noise, respectively. Each component was calculated separately based on its characteristics. Specifically, orbital phase components were estimated using bilinear polynomial fitting, while elevation error-correlated phase components were determined by applying the least squares method to the linear relationship between the vertical baseline and the DEM error (Shi et al. 2022). Additionally, the topography-dependent atmospheric phase delay was estimated using the least squares method, followed by the application of temporally high-pass and spatially low-pass filters to remove the phase introduced by turbulence effects (Liao et al. 2013). After removing orbital ramps, topography errors, and atmospheric delays, we used Least Squares (LS) inversion to retrieve the time series displacements. This allowed us to generate a mean velocity map in the Line of Sight (LOS) direction and to mitigate any residual ramps in the velocity field (Berardino et al. 2002).
3.3 Mapping
3.3.1 Z-score Analysis
Mapping landslides using InSAR is a challenging task (Herrera et al. 2009). Geometric image distortions due to layover and shadow effects, unwrapping errors caused by fast-moving landslides, gaps in radar image time series, and unfavourable geometric relationships between satellite LOS directions and actual terrain movements all make the reliable detection of deformation areas challenging (Barra et al. 2016, Haghshenas Haghighi and Motagh 2016). Therefore, several important post-processing steps needed to be performed after deriving LOS displacement. In this case, we employed the Getis-Ord Gi* statistical method to post-process the InSAR results, aiming to eliminate outliers and to identify reliable clusters in the LOS deformation maps (Herrera et al. 2013; Ord and Getis 1995; Wang et al. 2023).
For scatter point i in the InSAR results, the \({G}_{i}^{*}\) statistic is defined as:
Where n represents the total number of scatter points; xi denotes the LOS displacement of scatter point i recorded by InSAR; wi,jstands for the distance between scatter points i and j; \(\overline{X}\) and S represent the mean and standard deviation of all unit displacements, respectively.
The \({G}_{i}^{*}\) statistic yields Z-scores and their corresponding P-values. Typically, significant measurement points (MPs) are those with Z-scores exceeding the 95% confidence level. In this study, scatter points with probability values (P-values) < 0.05 (95% confidence level) and Z‑scores > ±|2| were selected and considered highly reliable.
In this paper, the post-processing of InSAR results was conducted using ArcMap’s hotspot analysis tool (Getis-Ord Gi*).
3.3.2 Mapping the Spatiotemporal Characteristics of Landslides
After post-processing clustering, active slopes were identified based on the LOS deformation maps, using a threshold of ±10 mm displacement rate. Optical images and DEM were integrated to remove misidentified active slopes. Furthermore, geographical characteristics of the active slopes, such as slope angle, aspect, and elevation, were analyzed. A comparison was made with catalogued landslides to compile a new list of active slopes. Then, the displacement rates were overlaid onto high-resolution texture features (digital products acquired from UAV and Lidar) to analyze the morphological characteristics of the landslides. Finally, three MPs with significant displacement on the landslides were selected and integrated with rainfall data to analyze the displacement variation during the rainy season.
3.4 Wavelet Transform for Time-Series Analysis
Wavelet analysis enables time-series records to be analyzed in time-frequency space to identify localized intermittent periodicities (Tomás et al. 2016). In this study, the Continuous Wavelet Transform (CWT) was applied to illustrate the periodicity and seasonality of landslides. Additionally, the Cross-Wavelet Transform (XWT) was also used to illustrate the time lag between rainfall and landslides (Liu et al. 2022). The calculation method of XWT entails multiplying the CWT of the first time series by the complex conjugate of the CWT of the second time series. The resulting phase difference (\(\Updelta \varnothing\)) represents the time lag (\(\Updelta t\)) between the two-time series (Tang et al. 2022). The calculation formula is as follows:
Here, T represents the period corresponding to the frequency domain it belongs to.
Prior to performing the CWT, the linear and non-linear components of the displacements were separated. The linear component was calculated using linear least squares fit, and the difference between the displacement time series and the linear component was the non-linear component (Tomás et al. 2016). Because wavelet analysis requires time-series data to be recorded at regular intervals, linearly interpolated values were used to fill in missing dates at the expected revisit times (12 days). This ensured that the interpolated rainfall data was consistent with the dense InSAR time series. Finally, the time series recordings were converted to the time-frequency domain, thus enabling the evaluation of basic information based on the distribution of the signal and its improved visualization (Damos and Caballero 2021, Tomás et al. 2016).
4 Results
4.1 Inventory of Active Slopes
The mean velocity maps in LOS direction are depicted in Fig. 4. In total, 304,421 MPs were identified from the ascending track datasets, with a density of 582 points per km2 and LOS deformation velocity of −44–37 mm/yr.; and 334,626 MPs were identified from the descending track datasets, with a density of 641 points per km2 and LOS deformation velocity of −35–32 mm/yr. The observation geometries of the ascending track and descending track datasets differed, resulting in different measured displacement rates. The central part of the valley is relatively flat and generally remained stable. Thus most MPs in the central valley exhibited little to no deformation. However, some isolated MPs in the valley did show minor negative velocity values, but they likely represented noise rather than actual deformation. The active slopes were primarily concentrated in the mid-low mountain areas where loess is widely distributed. Additionally, the ascending track datasets effectively captured the eastward-facing slopes, whereas the descending track datasets effectively captured the westward-facing slopes.

The mean velocity map in LOS direction was obtained from Sentinel‑1 datasets in (a) an ascending track and (b) a descending track. Positive values represent motion directed towards the satellite, while negative values represent movement away from the satellite
Based on the mean velocity maps, 121 unstable slopes were detected with an area of 12.79 km2 (Table S1). Of these, only 25 active slopes were detected by both the ascending track and descending track datasets. The ascending track dataset identified 62 active slopes alone, while the remaining 34 active slopes were detected solely by the descending track dataset. Field investigations had documented the spatial distribution of 39 landslides only (Fig. 5). These landslides documented by field surveys were informed by factors such as traffic condition and other hazards that may have positioned the landslide points at the lower edge of the landslide. However, the InSAR monitoring identified where the activity occurred, and given the difference between the two coordinates, the landslides documented near or at the lower edge of the InSAR identification range were considered to be accurately identified for statistical analysis. Among the 39 field-documented landslides, 29 were detected as active slopes in our study, which indicates that slow deformation had been taking place from 2014 to 2021. As such, we detected 74.4% of the past landslides. Those landslides that were not detected, but were still documented, likely are in a stable state today, or their deformation may have exceeded the range detectable by the methodology employed. In contrast, 92 active slopes that had not been previously included in documentation were identified by our methods. These additional slopes may pose potential landslide risks that necessitate further investigation and monitoring.

Detected active slopes. Light yellow polygons represent active slopes detected by both the ascending track and descending track datasets. Orange polygons represent active slopes detected only by the ascending track dataset, and blue polygons represent active slopes detected only by the descending track dataset. Green points indicate documented landslides that were detected by InSAR, while red points represent documented landslides that were not detected by InSAR. The location of meteorological stations is indicated by the white pentagon. The white arrows highlight the locations of the three typical landslides used in the analysis
4.2 Displacements of Typical Landslides
Three documented landslides were selected to further analyze displacement characteristics (Table 2). These landslides were selected based on the inventory map and database of historically active landslide areas. The three selected landslides continue to pose a threat to infrastructure and communities. In addition, these landslides had high-resolution imagery data available that provided useful information for the analysis of InSAR monitoring results. The distribution and size of the landslides was also taken into account. Aksay, a large single landslide, was located in the northwest of the survey area; Kurdnenburak, a cluster of medium-sized landslides, was in the center of the survey area; and Ashotas River, a large cluster of landslides, was in the northeast of the survey area (Fig. 5). For the descending track, the observation geometry meant that the sensor directly faced the eastward facing Kurdnenbrak (azimuth 90.0°) and Ashotas River (azimuth 118.1°) landslides. The average slopes are 17.3 and 17.5°, respectively, angles that are less steep than the observation angle of the descending track. However, this geometry still resulted in layering and foreshortening effects for the descending track images. These effects compressed the slopes of Kurdnenbrak and Ashotas River, thus restricting the extraction of deformation signals. Because there were 174 ascending track images available and 159 for the descending track during the same period, the following analysis utilized results from the ascending dataset only.
4.2.1 Aksay Landslide
The accumulation body of the Aksay landslide exhibits numerous cracks, with nine cracks being identified from the optical image captured on 25 October 2002 (Fig. 6a). A comparison with the image from 6 July 2019 reveals the formation of a new crack (crack #10) on the upper edge of the landslide, which measures 202 meters in length and has a maximum width of 1.75 meters. Additionally, cracks #4, #6, and #9 have significantly grown. This landslide remained active from October 2014 to October 2021, with substantial displacement velocity in the middle of the landslide, reaching a maximum rate of −44.4 mm/yr. In the image from March 2002, there were ten households downstream of the landslide, but by July 2019, all ten residences had been abandoned and repurposed. The construction land was converted into arable land or grassland (Fig. 6b).

a Historical image of the Aksaiyi landslide (October 25, 2002); b Mean velocity map superimposed on the image (July 6, 2019), where P1 is the selected location for time-series analysis. The white dashed line indicates the distribution of landslide scarps interpreted from the image, and the areas occupied by households are marked with black polygons
4.2.2 Kurdnenburak Landslide
For the Kurdnenburak landslide, the area with the highest deformation rate was located in the middle and upper areas of the landslide, with a max deformation rate of −32.45 mm/yr., during October 2014 and October 2021, while the cumulative deformation exceeded 200 mm (Fig. 7a). The failure was of a minor scale, characterized by a short runout and displaying flow behaviour similar to that of a slurry (Fig. 7b). The sky view factor (SVF) map was generated to accurately identify the erosion range and accumulation area of the landslide (Fig. 7c).

a Mean velocity map superimposed on UAV images acquired in May 2017. The distribution of the Kurdnenburak landslide is delineated by the white dashed lines, where P2 is the location selected for time-series analysis. b 3D surface model of interpreted landslides, c LiDAR-SVF map, where the dotted yellow lines represent interpreted earth flow boundaries within the Kurdnenburak landslide
4.2.3 Ashotas River Landslide
Clastic rocks are exposed at the top of the Ashotas River landslide, and dense MPs were monitored in these areas, especially where they appear to be in a stable state. Active slopes were observed in the middle of the landslide mass group, with maximum creeping rates of −35.68 mm/yr (Fig. 8a). From the generated SVF map, the extent of the landslide could be identified based on texture. Moreover, features such as cracks and traces of water erosion could be observed in the loess landslide (Fig. 8b). Combined with the 3D map, the erosion range and accumulation area of the landslide could be accurately identified. Here the source area of the landslide has eroded due to precipitation, and the distribution passes through the transport area before accumulating in places with smaller slopes (Fig. 8c). Tensile fractures were evident along the rear edge of the landslide, spanning a distance of 312.93 m and a maximum width of 2.13 m. A 3D surface model of the erosion area and a single crack is presented in Fig. 8d, e, respectively. The foot of the landslide is located in a residential area, and the distance from the crack to the residential area is 1183 m, with a height difference of 266 m. Under the influence of external factors, such as heavy rain, the residential area is at relatively high risk of extremely harmful, highly remote landslides. The active area detected by InSAR should be used to guide the installation of ground monitoring equipment and to enhance the regular inspection of this area, especially at the onset of heavy rainfall, to successfully provide early warning if a landslide were to occur.

Combination of multiple remote sensing technologies to characterize an active slope: a Mean velocity map in the LOS direction obtained from the ascending track. P3 is the location selected for time-series analysis. The black dotted rectangle represents the area selected for further 3D analysis. b SVF image, c 3D surface model, where the white dotted line defines the locations of the crack and erosion areas, and the solid red line delineates the landslide boundary; d 3D surface model of the erosion area; e 3D surface model of a single crack
4.3 Time-series Deformation Analysis
The kinematic characteristics of the landslides were mapped by analyzing their time series of deformation. In Fig. 9, the general linear trend of landslides from October 2014 to October 2021 indicates that inelastic deformations occurred under the influence of gravity, though it is important to note that some fluctuation around the linear trend was also observed. These periods overlapped with the rainy season in some years, such as at P1, P2, and P3 in 2017, 2018, 2019, and 2020. To analyze the impact of the rainfall on the deformation rate, the deformation rate during the rainy season was quantified and recorded in Table 3. The average displacement rates of the yearly rainy season at points P1, P2, and P3 from 2017–2020 were 26 mm/yr., 22 mm/yr., and 24 mm/yr., respectively. Most displacement that occurred within each year was concentrated during the rainy season. From April to September, the occurrence of rainfall augmented soil moisture, substantially decreased the shear strength of the landslide, and accelerated deformation. We also observed changes in the velocities of a single landslide during rainy seasons in different years. One possible reason for this was the fluctuation in annual rainfall. Additionally, factors such as rainfall frequency, intensity, duration, and the hydrogeological conditions of the landslide during rainfall events (such as soil moisture content and groundwater levels) can also influence the displacement velocity (Vassileva et al. 2023).

To quantitatively analyze the relationship between rainfall and landslide deformation, the least squares method was utilized to eliminate the linear component in the time series displacement, thereby retaining only the nonlinear component. The remaining data was further analyzed using wavelet analysis tools. Figure 10 displays the nonlinear component of the InSAR time series displacement as well as the CWT analysis results of rainfall, with the color bar representing the gradient of the energy spectrum and the red area representing high-value regions. For the observation period of the nonlinear displacement time series and precipitation between 2014 and 2021, the three landslides all exhibited significant high-frequency signals around a frequency of ~32 in the frequency domain at the 95% confidence level. A frequency domain of 32 corresponds to an approximate period of 384 days (~32*12 days), where 12 days represents the revisit period of Sentinel data. Because rainfall is a well-known periodic seasonal factor with a one-year cycle, both the nonlinear displacement and rainfall are reflected as high-frequency signals within the same frequency domain. Consequently, it can be deduced that the nonlinear displacement exhibits a consistent one-year period (365-day period) similar to that of rainfall. Furthermore, during the periods of intense rainfall occurring between April and September in 2017, 2018, and 2020, we detected certain high-frequency signals from 12 to 48 days that aligned with the effects of seasonal rainfall on landslides.

CWT of the non-linear deformation and rainfall series for the three typical landslides. The vertical axis of the graph represents the frequency domain, and the thin black line divides the results into reliable and unreliable parts. The full-color areas represent the reliable parts, while the light-colored areas represent the unreliable parts. The thick black line indicates the 95% confidence level (Damos and Caballero 2021)
The XWT was applied to the double time series after CWT to quantitatively analyze the correlation and time lag effect between nonlinear displacement and rainfall. As shown in Fig. 11, when the vertical axis neared the frequency domain of ~32, the time series of rainfall and seasonal displacement displayed clear high-frequency signals with maximum consistency and reached a significant level, thus fully demonstrating the consistent periodic characteristics between rainfall and nonlinear displacement. Meanwhile, at the frequency of ~32, the direction of the arrows inside the thick black solid line pointed slightly down and to the right, which indicated that the time series were in-phase and had a certain delay. Furthermore, the phase differences (arrow directions) that reached significant confidence intervals were statistically analyzed, and the results showed that ∆∅ corresponding to P1, P2, and P3 were 24 ± 8°, 27 ± 7°, and 19 ± 8°, respectively. At the frequency of ~32, the corresponding period T was 365 days, and according to Eq. 2, the delay effect between rainfall and seasonal displacement was approximately 19–27 days.

CWT of the non-linear deformation and rainfall series for the three typical landslides. The relative phase relationship between the time series is shown with arrows. An arrow pointing right indicates that the time series are in phase, an arrow pointing left indicates that they are anti-phase, and an arrow pointing straight down indicates that rainfall leads displacement by 90° (Liu et al. 2022). The color bar denotes magnitude and coherence, where blue represents the lowest power (uncorrelated), and red is associated with the highest power (highly correlated). The 95% confidence level is represented by the thick black line
5 Discussion
5.1 Validity Assessment
Firstly, we analyzed the Aksay landslide (aspect = 162°) by combining data from both the ascending and descending tracks. Compared to the ascending track, the descending track captured sparse MPs in the middle of the landslide. Because the sensitivity of ascending and descending data to LOS motion varied with slope and aspect angle, disparities exist in the LOS displacement derived from these tracks. Nevertheless, the velocity field distributions obtained from both ascending and descending tracks exhibited similarities, with the middle part of the landslide experiencing maximum displacement exceeding 20 mm/year (Fig. 12a, b). Additionally, we conducted a field investigation on the Aksay landslide from May 30 to June 6, 2022 (Fig. 12), and the displacement features obtained by InSAR of this landslide were highly consistent with the actual topography and texture. Several sub-landslide failures were distributed on this landslide where a significant tensile crack was seen at the trailing edge. The crack is 281 m long with a tensile dislocation of 7.39 m. It was obvious before 2002 and is still in an active state. The MPs at both ends of the crack are dense, but there are no MPs in the middle section. The middle is where the deformation gradient should exceed the detectable range of InSAR (Hoeser 2018; Moretto et al. 2021). Furthermore, following the work of Herrera et al. (2013), we projected the LOS displacements of the Aksay landslide from the ascending and descending tracks onto the direction of movement along the slope (Vslope). The value of Vslope depends on the cosine of the angle between the steepest slope direction and the LOS. To avoid anomalous solutions, we discarded Vslope values greater than 3.33 times the Vlos (Herrera et al. 2013). The squared correlation coefficient (R2) for the Vslope of common points between the ascending and descending tracks was 0.52, with a standard deviation of 10.9 mm/year (Fig. 12c).

Validity assessment of Aksay landslide. a and b are displacement velocity maps in LOS direction obtained from the ascending and descending tracks, respectively, where the solid red lines delineate the extent of the landslide; c field investigation; d standard deviation of the Vslope for common points between the ascending and descending tracks, where Vslope represents the LOS displacement projected along the slope direction
Several specific factors in the study area influenced the accuracy of InSAR. The dense vegetation during the summer resulted in a low signal-to-noise ratio in SAR images. Complex terrain introduced phase noise, especially for low-coherence pixels on steep slopes. The measurement density and the maximum detectable velocity in this area were limited by the C‑band Sentinel data. Nevertheless, over a period of 7 years, 174 ascending and 159 descending images that were acquired at intervals of 12–24 days partially mitigated the adverse factors in the observation environment and provided signals for deformation patterns and landslide locations, thus enabling an effective description of the landslide.
5.2 Relationship Between Displacement and Rainfall
The wavelet analysis tool has demonstrated its usefulness and is implemented in freely available MATLAB code that can be used for correlation analysis of two non-linear transformation variables without requiring input parameters (Liu et al. 2022; Tomás et al. 2016). The results of the wavelet analysis in this study indicate that the loess landslides in the Ili Valley are characterized by seasonal variability on a 1-year cycle, which is consistent with the results of some previous studies (Kang et al. 2021; Liu et al. 2022; Pang et al. 2023). It is worth noting that the Ili Valley has a temperate continental arid climate, which means that during the winter season, when the temperature drops below freezing and the air is dry, landslide areas remain stable. However, when the temperature rises above freezing in March, the region experiences increased rainfall that causes a surge in soil moisture and reduces the stability of the soil (Zhuang et al. 2021). The increased moisture in the soil layer adds to the self-weight of the landslide and raises the pore water pressure in the soil layer, thereby leading to the destabilization of the soil layer and hastening the movement of the landslide (Shi et al. 2019). When the rainfall subsides in November and the temperature drops below 0 °C, the landslide areas return to a stable state, thus completing the one-year cycle.
The XWT wavelet analysis tool shows that there is a time lag of less than one month between rainfall and deformation. Seasonal rainfall speeds up landslide deformation by changing the pore pressure at the base, and it requires time for rainwater to seep into the base of the landslide. As a result, there is a lag effect in the response of landslide deformation to rainfall, and this is closely associated with the loess geological features of landslides, hydraulic diffusivity, groundwater level depth, and rainfall intensity (Tomás et al. 2016, Wang et al. 2023). In the future, hydrological models could be used for further analysis to evaluate the geological properties of landslides. This study only analyzed three catalogued typical landslides and only considered rainfall as the influencing factor. Due to the time delay between rainfall and displacements over the local study area, further research is needed to validate these findings.
5.3 Limitations and Applicability
The study area exhibited dense vegetation during the summer, with a maximum NDVI close to 1 (Fig. 1b). The dense vegetation resulted in a significant reduction in coherence in the interferogram. Additionally, phase gradients were higher over steep terrain, thereby increasing phase unwrapping errors that propagate spatially. Also, atmospheric heterogeneity increases over mountains, thus enhancing delay artifacts that vary with topography (Kang et al. 2021). Due to factors such as high vegetation coverage in the study area, coherence was severely affected by decorrelation. Therefore, in the processing, we employed techniques such as multi-look and filtering to enhance coherence. At the same time, due to sparsely coherent points, we may have encountered phase unwrapping issues during calculation, which would have resulted in the underestimation of or failure to detect landslides. Hence, we adopted a slightly low threshold when selecting points to include more pixels for analysis, and this ultimately led to relatively high noise levels in the results. Therefore, in the landslide identification and deformation analysis process, we focused on analyzing regions with concentrated deformation patterns. The study area had a high-incidence region of landslides, but the dense vegetation made it challenging to obtain high-quality deformation detection data based on the acquisition of InSAR data. However, in the case that the traditional methods cannot meet the actual needs, this paper provides a method to obtain additional deformation information to effectively supplement the traditional methods.
Among the 121 identified active slopes, the majority (118) were distributed in the mid-low mountain range of 1200–2400 meters. According to the slope analysis, 87 active slopes occurred in the gentle slope range of 15–30°, 18 landslides occurred in areas with slopes less than 15°, and 16 landslides occurred in slopes ranging from 30–45° (Fig. 13a, b). This can be attributed to the fact that loess deposits accumulate easily in the gentle slope areas of the mid-low mountains, thus providing a sufficient material foundation for landslide occurrence (Shi and Hu 2023). Based on the geometric characteristics of track direction and angle of incidence, it is more appropriate to utilize ascending track datasets for monitoring active slopes facing east and to utilize descending track datasets for monitoring active slopes facing west. Statistical data indicates that landslides in the Ili Valley are primarily concentrated on slopes facing southeast (45–225°) (Fig. 13c), likely due to the slower evaporation, higher humidity and cooler temperatures in these areas. Conversely, active slopes facing northwest tend to be drier and warmer and have sparse vegetation (Liang et al. 2015), which results in better coherence and more MPs being detected. Combining the ascending and descending orbit data provides a more comprehensive detection of the study area, with the ascending orbit data more applicable to this particular study.

Relationship between the distribution of active slope and a altitude, b slope and c aspect
Under ideal circumstances, based on the Nyquist sampling theorem, the maximum displacement of the same target observed twice is λ/4 of the wavelength. However, the ideal circumstances request high coherence, minimal orbital and topographic errors, no atmospheric artifacts, and low phase noise over a homogeneous deformation field. In practice, the maximum detectable rate is lowered by factors such as uneven terrain, atmospheric effects, and spatial deformation rate gradients (Manconi 2021). When displacement exceeds the measurable gradient, it leads to phase ambiguity and easily introduces phase unwrapping error. This means, therefore, that displacement cannot be detected accurately, which limits the ability of InSAR to subsequently detect the acceleration phase of the landslide (Fobert et al. 2021; Hoeser 2018). For such cases, SAR data with longer wavelengths or shorter revisit periods can increase the ability of InSAR to detect rapid displacement targets (Moretto et al. 2021) as well as to integrate the use of high-resolution optical remote sensing, UAV photogrammetry and ground-based sensor measurements to monitor rapidly displacement targets (Eker and Aydın 2021; Podolszki et al. 2021). Further, point-like target offset tracking can be used as an alternative tool (Shi et al. 2015).
Despite its limitations, InSAR provides useful information in monitoring creeping landslides. Spatial observation points were extracted from InSAR to identify the boundaries of active parts of landslides, which differed from the previously mapped boundaries of landslides. Based on the identified results, and through the analysis of other factors, such as location, extent, magnitude, acceleration state and drivers of deformation, it is feasible to update the active landslide inventory maps in order to specify key areas that require detailed monitoring and to present a practical approach in improving the accuracy of landslide mitigation strategies. Along with the accumulation of available SAR images, the continuous implementation of new satellite missions, multiple wavelengths, and high temporal-spatial resolution satellite data should all assist greatly in monitoring the accelerated phase of landslides. Meanwhile, along with the advancement of computational methods and the improvement of software and hardware efficiency, which make it possible to process large amount of InSAR data rapidly, time series InSAR not only identifies the key areas of landslides, but also reports on the moment of change in rate (acceleration/deceleration) more accurately. This will further improve the capability of time series InSAR technology in landslide monitoring and forecasting (Hoeser 2018).
6 Conclusions
In this study, we utilized InSAR technology to unveil the potential spatial-temporal attributes of creeping loess landslides in the Ili Valley. Through this approach, we were able to identify over 100 active landslides spanning a total coverage area of 12.79 km2. By employing a combination of optical remote sensing, UAVs, and LiDAR techniques, we gained a comprehensive understanding of the morphological characteristics and kinematic mechanisms of these landslides. The findings from our analysis, which incorporated wavelet analysis of three representative documented landslides, indicate that the creeping deformation of landslides exhibits seasonal variations with a one-year cycle. Furthermore, we observed that the creep deformation of landslides was highly responsive to seasonal rainfall, with a time delay of less than one month. These results hold significant implications for the prevention and mitigation of future geological hazards in the Ili Valley and other regions with comparable complex geomorphologies.
Availability of data and material
Data used in this study is available upon reasonable requests made to the first author Binbin Fan (fanbinbin10@mails.ucas.ac.cn)
References
Barra A, Monserrat O, Mazzanti P, Esposito C, Crosetto M, Scarascia Mugnozza G (2016) First insights on the potential of sentinel‑1 for landslides detection. Geomatics Nat Hazards Risk 7:1874–1883. https://doi.org/10.1080/19475705.2016.1171258
Bekaert DPS, Handwerger AL, Agram P, Kirschbaum DB (2020) Insar-based detection method for mapping and monitoring slow-moving landslides in remote regions with steep and mountainous terrain: An application to nepal. Remote Sens Environ 249:111983. https://doi.org/10.1016/j.rse.2020.111983
Berardino P, Fornaro G, Lanari R, Sansosti E (2002) A new algorithm for surface deformation monitoring based on small baseline differential sar interferograms. IEEE Trans Geosci Remote Sens 40:2375–2383. https://doi.org/10.1109/tgrs.2002.803792
Damos P, Caballero P (2021) Detecting seasonal transient correlations between populations of the west nile virus vector culex sp. And temperatures with wavelet coherence analysis. Ecol Inform 61:101216
Eker R, Aydın A (2021) Long-term retrospective investigation of a large, deep-seated, and slow-moving landslide using insar time series, historical aerial photographs, and uav data: The case of devrek landslide (nw turkey). Catena 196:104895. https://doi.org/10.1016/j.catena.2020.104895
Ferretti A, Prati C, Rocca F (2001) Permanent scatterers in sar interferometry. IEEE Trans Geosci Remote Sens 39:8–20. https://doi.org/10.1109/36.898661
Fobert M‑A, Singhroy V, Spray JG (2021) Insar monitoring of landslide activity in dominica. Remote Sens 13:815
Gabriel AK, Goldstein RM, Zebker HA (1989) Mapping small elevation changes over large areas: differential radar interferometry. J Geophys Res 94:9183–9191
Haghshenas Haghighi M, Motagh M (2016) Assessment of ground surface displacement in taihape landslide, New Zealand, with c‑ and x‑band sar interferometry. N Z J Geol Geophys 59:136–146. https://doi.org/10.1080/00288306.2015.1127824
Herrera G, Davalillo J, Mulas J, Cooksley G, Monserrat O, Pancioli V (2009) Mapping and monitoring geomorphological processes in mountainous areas using psi data: Central pyrenees case study. Nat Hazards Earth Syst Sci 9:1587–1598
Herrera G, Gutiérrez F, García-Davalillo JC, Guerrero J, Notti D, Galve JP, Fernández-Merodo JA, Cooksley G (2013) Multi-sensor advanced dinsar monitoring of very slow landslides: The tena valley case study (central spanish pyrenees). Remote Sens Environ 128:31–43. https://doi.org/10.1016/j.rse.2012.09.020
Hoeser T (2018) Analysing the capabilities and limitations of insar using sentinel‑1 data for landslide detection and monitoring.
Hooper A, Segall P, Zebker H (2007) Persistent scatterer interferometric synthetic aperture radar for crustal deformation analysis, with application to volcan alcedo, galapagos. J Geophys Res Earth. https://doi.org/10.1029/2006jb004763
Hu X, Bürgmann R, Lu Z, Handwerger AL, Wang T, Miao R (2019) Mobility, thickness, and hydraulic diffusivity of the slow-moving monroe landslide in california revealed by l‑band satellite radar interferometry. J Geophys Res Solid Earth 124:7504–7518. https://doi.org/10.1029/2019JB017560
Hu X, Bürgmann R, Fielding EJ, Lee H (2020) Internal kinematics of the slumgullion landslide (USA) from high-resolution uavsar insar data. Remote Sens Environ 251:112057. https://doi.org/10.1016/j.rse.2020.112057
Jiang M, Ding X, Hanssen RF, Malhotra R, Chang L (2015) Fast statistically homogeneous pixel selection for covariance matrix estimation for multitemporal insar. IEEE Trans Geosci Remote Sens 53:1213–1224. https://doi.org/10.1109/TGRS.2014.2336237
Jones S, Kasthurba A, Bhagyanathan A, Binoy B (2021) Impact of anthropogenic activities on landslide occurrences in southwest india: an investigation using spatial models. J Earth Syst Sci 130:1–18
Kang Y, Lu Z, Zhao C, Xu Y, Kim J, Gallegos AJ (2021) Insar monitoring of creeping landslides in mountainous regions: A case study in eldorado national forest, california. Remote Sens Environ. https://doi.org/10.1016/j.rse.2021.112400
Liang S, Yi Q, Liu J (2015) Vegetation dynamics and responses to recent climate change in Xinjiang using leaf area index as an indicator. Ecol Indic 58:64–76
Liao M, Jiang H, Wang Y, Wang T, Zhang L (2013) Improved topographic mapping through high-resolution sar interferometry with atmospheric effect removal. ISPRS J Photogramm Remote Sens 80:72–79. https://doi.org/10.1016/j.isprsjprs.2013.03.008
Liu L, Li S, Jiang Y, Bai Y, Luo Y (2017) Failure mechanism of loess landslides due to saturatedunsaturated seepagecase study of gallente landslide in ili,xinjiang. J Eng Geol 25:1230–1237
Liu Y, Qiu H, Yang D, Liu Z, Ma S, Pei Y, Zhang J, Tang B (2022) Deformation responses of landslides to seasonal rainfall based on insar and wavelet analysis. Landslides 19:199–210. https://doi.org/10.1007/s10346-021-01785-4
Manconi A (2021) How phase aliasing limits systematic space-borne dinsar monitoring and failure forecast of alpine landslides. Eng Geol 287:106094. https://doi.org/10.1016/j.enggeo.2021.106094
Moretto S, Bozzano F, Mazzanti P (2021) The role of satellite insar for landslide forecasting: limitations and openings. Remote Sens 13:3735
Ord JK, Getis A (1995) Local spatial autocorrelation statistics: distributional issues and an application. Geogr Anal 27:286–306. https://doi.org/10.1111/j.1538-4632.1995.tb00912.x
Pang L, Li C, Liu D, Zhang F, Chen B (2023) Response of guobu slope displacement to rainfall and reservoir water level with time-series insar and wavelet analysis. Appl Sci 13:5141
Podolszki L, Kosović I, Novosel T, Kurečić T (2021) Multi-level sensing technologies in landslide research—hrvatska kostajnica case study, Croatia. Sensors 22:177
Rodriguez-Cassola M, Prats-Iraola P, Zan FD, Scheiber R, Reigber A, Geudtner D, Moreira A (2015) Doppler-related distortions in tops sar images. IEEE Trans Geosci Remote Sens 53:25–35. https://doi.org/10.1109/TGRS.2014.2313068
Shi X, Hu X (2023) Characterization of landslide displacements in an active fault zone in northwest china. Earth Surf Process Landforms. https://doi.org/10.1002/esp.5594
Shi X, Zhang L, Balz T, Liao M (2015) Landslide deformation monitoring using point-like target offset tracking with multi-mode high-resolution terrasar‑x data. ISPRS J Photogramm Remote Sens 105:128–140. https://doi.org/10.1016/j.isprsjprs.2015.03.017
Shi X, Yang C, Zhang L, Jiang H, Liao M, Zhang L, Liu X (2019) Mapping and characterizing displacements of active loess slopes along the upstream yellow river with multi-temporal insar datasets. Sci Total Environ 674:200–210. https://doi.org/10.1016/j.scitotenv.2019.04.140
Shi X, Wang J, Jiang M, Zhang S, Wu Y, Zhong Y (2022) Extreme rainfall-related accelerations in landslides in danba county, sichuan province, as detected by insar. Int J Appl Earth Obs Geoinform 115:103109. https://doi.org/10.1016/j.jag.2022.103109
Takaku J, Tadono T, Tsutsui K, Ichikawa M (2016) Validation of “aw3d” global dsm generated from alos prism. ISPRS Ann Photogramm Remote Sens Spatial Inf Sci 3:25–31
Tang W, Zhao X, Motagh M, Bi G, Li J, Chen M, Chen H, Liao M (2022) Land subsidence and rebound in the Taiyuan basin, northern China, in the context of inter-basin water transfer and groundwater management. Remote Sens Environ 269:112792
Tang W, Zhao X, Bi G, Chen M, Cheng S, Liao M, Yu W (2023) Quantifying seasonal ground deformation in Taiyuan basin, China, by sentinel‑1 insar time series analysis. J Hydrol Reg Stud 622:129654. https://doi.org/10.1016/j.jhydrol.2023.129654
Tomás R, Li Z, Lopez-Sanchez JM, Liu P, Singleton A (2016) Using wavelet tools to analyse seasonal variations from insar time-series data: A case study of the huangtupo landslide. Landslides 13:437–450. https://doi.org/10.1007/s10346-015-0589-y
Vassileva M, Motagh M, Roessner S, Xia Z (2023) Reactivation of an old landslide in north-central iran following reservoir impoundment: Results from multisensor satellite time-series analysis. Eng Geol 327:107337. https://doi.org/10.1016/j.enggeo.2023.107337
Wang W, Yin Y, Zhu S, Wei Y, Zhang N, Yan J (2019) Dynamic analysis of a long-runout, flow-like landslide at areletuobie, yili river valley, northwestern China. Bull Eng Geol Environ 78:3143–3157. https://doi.org/10.1007/s10064-018-1322-6
Wang W, Motagh M, Mirzaee S, Li T, Zhou C, Tang H, Roessner S (2023) The 21 july 2020 shaziba landslide in China: results from multi-source satellite remote sensing. Remote Sens Environ 295:113669. https://doi.org/10.1016/j.rse.2023.113669
Xu Q, Guo C, Dong X, Li W, Lu H, Fu H, Liu X (2021) Mapping and characterizing displacements of landslides with insar and airborne lidar technologies: a case study of danba county, southwest china. Remote Sens 13:4234
Yanjun S, Weijun J, Xuetao Y, Dongting J, Zhendong C, Qiang H, Xiaohong C (2022) Geophysical exploration on unique geostructure of super large zeketai landslide in xinyuan county and back analysis on influence of old landslide. J Eng Geol 30:760–771
Yu Y, Balz T, Luo H, Liao M, Zhang L (2019) Gpu accelerated interferometric sar processing for sentinel‑1 tops data. Comput Geosci 129:12–25. https://doi.org/10.1016/j.cageo.2019.04.010
Zeng MX, Song YG, Yang H, Li Y, Cheng LQ, Li FQ, Zhu LD, Wu ZR, Wang NJ (2021) Quantifying proportions of different material sources to loess based on a grid search and monte carlo model: A case study of the ili valley, central asia. Palaeogeogr Palaeoclimatol Palaeoecol. https://doi.org/10.1016/j.palaeo.2020.110210
Zheng P, Wang J, Wu Z, Huang W, Li C, Liu Q (2022) Effect of water content variation on the tensile characteristic of clayey loess in ili valley, China. Appl Sci 12:8470
Zhuang M, Wei Y, Shao H, Zhu S, Shi A, Huang Z, Zhu H (2018) Type and characteristics of loess landslides in piliqing river,in yili of xinjiang uygur autonomous region. Chin J Geol Hazard Control 29:54–59
Zhuang M, Gao W, Zhao T, Hu R, Wei Y, Shao H, Zhu S (2021) Mechanistic investigation of typical loess landslide disasters in ili basin, Xinjiang, China. Sustainability 13:635
Zou Y, Qi S, Guo S, Zheng B, Zhan Z, He N, Huang X, Hou X, Liu H (2022) Factors controlling the spatial distribution of coseismic landslides triggered by the mw 6.1 ludian earthquake in china. Eng Geol 296:106477
Acknowledgements
We would like to thank the HighEdit company for assistance with English language editing of this manuscript. The Copernicus Sentinel‑1 data were provided by European Space Agency (ESA) and downloaded from the Alaska Satellite Facility (ASF). We also acknowledge A. Grindsted, J.C. Moore and S. Jevrejeva for creating the MATLAB package used in CWT, XWT and WTC analysis.
Funding
This research was supported by The Third Xinjiang Scientific Expedition Program (Grant No. 2021xjkk0903) and The High-End Foreign Experts Project (Grant No. E0600101).
Funding
Open Access funding enabled and organized by Projekt DEAL.
Author information
Authors and Affiliations
Contributions
B. Fan: conceived and designed the study, performed the InSAR data processing and analysis; G. Luo: conceived and designed the study, supervised the research and revised the manuscript; O. Hellwich: supervised the research and revised the manuscript; X. Shi: contributed to the interpretation and discussion of the results; X. Yuan: provided advice on the methodology and results; X. Ma: provided advice on the methodology and results; M. Shang: provided advice on the methodology and results; Y. Wang: provided advice on the methodology and results. All authors contributed to drafting the manuscript.
Corresponding authors
Ethics declarations
Conflict of interest
B. Fan, G. Luo, O. Hellwich, X. Shi, X. Yuan, X. Ma, M. Shang and Y. Wang declare that they have no competing interests.
Supplementary Information
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Fan, B., Luo, G., Hellwich, O. et al. Monitoring Creeping Landslides with InSAR in a Loess-covered Mountainous Area in the Ili Valley, Central Asia. PFG 92, 235–251 (2024). https://doi.org/10.1007/s41064-024-00292-0
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s41064-024-00292-0