
Highlights
-
Dense and flat freestanding Bi2Te3-based thermoelectric nano films were successfully fabricated by sputtering technology using a newly developed nano graphene oxide membrane as a substrate.
-
On-chip micro temperature controllers were integrated using conventional micro-electromechanical system technology, to achieve energy-efficient temperature control for low-power electronics.
-
The tunable equivalent thermal resistance enables an ultrahigh temperature control capability of 100 K mW−1 and an ultra-fast cooling rate exceeding 2000 K s−1, as well as excellent reliability of up to 1 million cycles.
Abstract
Multidimensional integration and multifunctional component assembly have been greatly explored in recent years to extend Moore’s Law of modern microelectronics. However, this inevitably exacerbates the inhomogeneity of temperature distribution in microsystems, making precise temperature control for electronic components extremely challenging. Herein, we report an on-chip micro temperature controller including a pair of thermoelectric legs with a total area of 50 × 50 μm2, which are fabricated from dense and flat freestanding Bi2Te3-based thermoelectric nano films deposited on a newly developed nano graphene oxide membrane substrate. Its tunable equivalent thermal resistance is controlled by electrical currents to achieve energy-efficient temperature control for low-power electronics. A large cooling temperature difference of 44.5 K at 380 K is achieved with a power consumption of only 445 μW, resulting in an ultrahigh temperature control capability over 100 K mW−1. Moreover, an ultra-fast cooling rate exceeding 2000 K s−1 and excellent reliability of up to 1 million cycles are observed. Our proposed on-chip temperature controller is expected to enable further miniaturization and multifunctional integration on a single chip for microelectronics.

Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
Temperature control is critical in modern electronics, due to the multiple effects of temperature on the performance of almost all microelectronic devices [1,2,3], as diverse as accuracy [4], sensitivity [5, 6], reliability [7, 8], stability [9, 10] and adjustability [11,12,13,14] of electronic components. Typically, temperature changes mainly come from diurnal and seasonal temperature variations of the external environment [15] (even a fluctuation of ~ 40 K/day or ~ 80 K/year) and the inevitable heating effect caused by operating internal high-power components (e.g., near-field wireless transmission of data [16, 17] and power [18, 19]) in the same microsystems. Moreover, the miniaturization of electronics towards high-performance and low-power consumption [20] and the diversification of demand for multidimensional integrated devices [21] in the Internet of Things make the temperature distribution of multifunctional microsystems manifest with spatial inhomogeneity and temporal uncertainty [22], leading to further challenges in thermal management [23, 24].
Heat transfer engineering is particularly important for temperature control, including passive heat transfer generally induced by a temperature difference in space, and active heat transfer driven by external physical fields [25]. To enhance solid-state thermal conduction, reducing thermal resistance [26, 27] between high-power electronics and their environment is the most widely studied passive heat dissipation strategy (demonstrated in Fig. 1a). Heat conduction can be significantly improved when combined with thermal convection using commercial fan cooling at the system level or liquid cooling at the chip level [28]. In general, two drawbacks of the above overall heat dissipation methods exist: they are not suitable for achieving local temperature stabilization at the component level; and they are limited to passively lowering the temperature difference (ΔT = Ts − Ta) between the power electronics (set temperature Ts) and their environment (ambient temperature Ta). Paradoxically, lowering ΔT, in return, reduces their heat dissipation power (proportional to ΔT), resulting in poor temperature control.

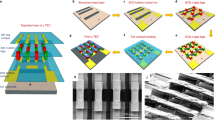
Design concept of the on-chip micro temperature controllers. Schematics of temperature control through a cooling by a heat sink with an ultra-low intrinsic thermal resistance \(R_{\text{th}}\) for high-power electronics, b heating by a microheater with an ultra-high \(R_{\text{th}}\) and c controlling by a micro thermoelectric (TE) temperature controller with a widely controllable equivalent thermal resistance \({R}_{\text{th}}^{\text{ e}}\) for low-power electronics. Note that the heating effect in a mainly causes the temperature fluctuations in b and c through their shared substrate. d SEM images of the nanoporous carbon nanotube (CNT) film, graphene oxide (GO) nano membrane by dip-coating and dense TE film by sputtering, respectively. e Top view false-colour SEM image of micro temperature controller (μ-TCer), showing the lateral multilevel microstructures. f Close-up image of TE legs marked in e. g 3D schematic of the TCer in vacuum, composed of a TE temperature control circuit driven by working current Iw (blue arrow), and a Pt sensor to measure temperature and simulate low-power electronics using a heating current Ih (green arrow). h Schematic vertical multilayer nanostructures of the μ-TCer marked with a white circle in g
Microheaters based on the Joule effect can maximize the performance of temperature-sensitive components by actively providing a stable set temperature at the microscale [10,11,12,13,14], which can enable a micro-electromechanical system (MEMS) resonator to achieve ppb frequency stability over external temperature variations of up to 100 K [10], and the temperature control capability can exceed 5 K mW−1 after increasing the thermal resistance Rth (as shown in Fig. 1b). While this overheating method results in increased system power consumption and heat dissipation, and inevitably leads to performance degradation and shortened lifetime of electronics, this is the only on-chip temperature stabiliser available to date. Therefore, a micro temperature controller (μ-TCer) with the ability to actively control ΔT by adjusting the equivalent thermal resistance (\({R}_{\text{th}}^{\text{ e}}\) = ΔT/Ph) for the low-power component (with heating power Ph) is highly advantageous. While intrinsic thermal resistance Rth is determined solely by material properties and geometry, \({R}_{\text{th}}^{\text{ e}}\) can be controlled by the ambient conditions (convection and radiation), active and passive heat transport in the system. In particular, \({R}_{\text{th}}^{\text{ e}}\) can be widely tuned by active solid-state cooling technologies based on the caloric [29] and thermoelectric [30] effects. A comprehensive comparison with the caloric coolers shows that an electronically controllable thermoelectric cooler (TEC) is more favourable owing to its stable device structure, and the advantages of not causing noise, vibration or volume changes in service. Particularly, thin-film micro TECs compatible with the integrated electronics exhibit high cooling power density and ultra-fast response [31,32,33,34].
The in-plane freestanding TEC based on nanograined SiGe films can achieve a cooling temperature of 10.3 K, but the low figure of merit of SiGe films (~ 0.14) needs to be improved [35]. A cooling temperature of up to 14 K was achieved recently by integrating high-performance Bi2Te3-based films with ordered microstructures into micro TECs, however, interface problems still hinder further improvement [36]. Therefore, the integration of high-performance TE nano films prepared by bottom-up strategies [37] into a micro TCer to achieve energy-efficient and wide-range temperature control for low-power components remains a major challenge. In this work, we present an on-chip μ-TCer based on a co-design concept that combines a high intrinsic Rth and a widely controllable \({R}_{\text{th}}^{\text{ e}}\) (schematically shown in Fig. 1c), enabling efficient and wide-range temperature control for low-power microelectronics. We have obtained dense and flat freestanding Bi2Te3-based TE nano films by sputtering technology using a newly developed ultra-thin graphene oxide membrane as a substrate (Fig. 1d), which were integrated into the μ-TCers using conventional MEMS technology (see Fig. S1 for detailed integration process). Figure 1e–h shows the structure of the μ-TCer, mainly consisting of a unicouple of 750-nm-thick n- and p-type TE legs with a length of ~ 25 μm and a width of ~ 50 μm, detailed parameters are summarized in Tables S1and S2. This optimized μ-TCer exhibits a remarkable temperature control capability of 100 K mW−1 and a fast response time of 5 ms, as well as excellent operational stability and cycle durability.
2 Experimental Section
2.1 Fabrication of Freestanding TE Nano Films
The carbon nanotube films prepared by vacuum filtration of carbon nanotube solution were first transferred onto SiN/Si frames (Fig. S2a−c). Then monolayer graphene oxide nanosheets were covered on carbon nanotube films by dip-coating method to form ultra-thin hybrid nano membranes (Fig. S2d, e), details in Sect. S1.1. High-purity Sb2Te3 (99.99%), Bi2Te3 (99.99%) and Bi2Se3 (99.99%) targets were used for co-sputtering p-type (Bi-doped Sb2Te3) and n-type (Se-doped Bi2Te3) films on above nanoporous carbon nanotube film and nanometre-thick hybrid membrane substrates, with a base chamber pressure of ~ 5.0 × 10−4 mTorr and Ar operating pressure of ~ 5 mTorr at 580 K with a ~ 30 min annealing before device integration and performance characterization. Controlling the deposition rate of the individual targets by varying the sputtering power can precisely regulate the chemical composition of the TE films.
2.2 Materials and Performance Characterization
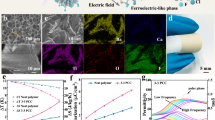
The microstructures and phase purity of the samples were characterized by X-ray diffraction (XRD, 3000 PTS diffractometer, GE Inspection Technologies GmbH, Cu radiation) and scanning electron microscopy (SEM, Zeiss ultra55, Germany), and Energy-dispersive spectra (EDS) were used to characterize the compositions of the samples. The thicknesses of the TE films were measured by cross-sectional SEM images (Fig. S2). The standard four-probe method (LSR-3, Linseis) was used to simultaneously measure the in-plane temperature-dependent Seebeck coefficient (α) and electrical conductivity (σ) with the He gas protection from room temperature to 420 K. The power factor (PF) was calculated according to the relation PF = α2 × σ. The measurement uncertainties for σ, α and PF were less than 2%, 5%, and 12%, respectively. The Hall electrical conductivity was measured with a physical property measurement system (PPMS) system based on the van der Pauw method, used for electrical conductivity calibration.
2.3 Integration and Measurement of Micro TCers
The fabrication process of the on-chip TE TCers is shown in Fig. S1. Beginning with a 1 × 1 cm2 silicon/silicon nitride (Si/Si3N4) substrate, including ~ 300-μm-thick Si and ~ 100-nm-thick double-sided Si3N4 layers, the Si3N4 layer was partially etched by reactive ion etching (RIE) using CF4 gas under the protection of the patterned photoresist. The freestanding Si3N4 window was obtained after removing the Si layer in the 40% KOH at 353 K for ~ 300 min. Second, temperature sensor electrodes (Pt/Ti, 38/6 nm, marked by green in Fig. 1e–h) were deposited on the Si3N4 window using standard lithography, magnetron sputtering, and lift-off process, followed by a 50-nm-thick Atomic Layer Deposition (ALD) of SiO2 at 473 K as an insulation layer. Next, the photoresist was lithographically patterned on the SiO2 layer, to open the electrodes for performance measurement by RIE with CF4 gas. Third, working electrodes (Au/Cr, 180/20 nm, marked by yellow in Fig. 1e–h) can be obtained by sputtering and patterned etching. It is worth noting that the key role of the above SiO2 layer is to insulate the Pt sensor and Au working electrodes in TCer (illustrated in the multilayer structure in Fig. 1g). Fourth, the unnecessary parts of the Si3N4 window together with SiO2 are thoroughly etched by RIE with CF4 gas to ensure good thermal insulation conditions for the μ-TCer. Finally, the individually prepared n- and p-type freestanding Bi2Te3-based TE thin films (Sect. 2.1) were integrated onto the above-prepared chips by the focused dual-beam technique (FEI, Helios 600i). The integrated on-chip μ-TCer is shown in the SEM image (Fig. 1e, f) and the corresponding 3D schematic (Fig. 1g, h), details in Tables S1 and S2. The PPMS system can provide a high vacuum (~ 0.01 mTorr) and accurate ambient temperature setting (280−380 K) for the performance test of our μ-TCers (similar to the operating temperature range of microelectronics). A Pt temperature sensor was used to assess the temperature controllability of our TCers (Fig. S3). Heat-compensation method (dual currents) was used for the cooling power and efficiency test, one is the working current (Iw), and another one is the heating current (Ih) to simulate the Joule effect of the micro components and simultaneously monitor the real-time temperature, details in Sect. S1.2.
2.4 Heat Transfer in Power Electronics
To stabilize the temperature of a low-power temperature-sensitive component in a closed system, its heating power Ph will be completely transferred to the heat sink by net cooling power Pc (Ph = Pc), and Pc can be described by the heat transfer equation [38]:
where PP, PJ, Pcon and PL are the Peltier cooling and Joule heating power, conductive heat power, and convective and radiative heat loss power, respectively. Since Ph = Pc and PL is negligible in a closed vacuum system, Eq. (1) can be expressed in detail as:
where Iw, T, α and R are the working current, absolute temperature, Seebeck coefficient and internal resistance of the μ-TCer, respectively. Hence, as a primary indicator of the μ-TCers for a power electronic component (with a heating current \(I_{\text{h}}\)), ΔT can be controlled by regulating the magnitude and direction of Iw (Fig. 2a). And its power consumption P can be expressed as [38]:

Cooling performance characterization. a Dependence of temperature difference ΔT on working current Iw and heating current Ih of the μ-TCer with optimized geometric parameters. b \(\Delta T_{{\text{c}}}^{ \max }\) (green) and \(R_{\text{th}}\) (black) as a function of the section-to-length ratio (S/L) in a series of μ-TCers (NO.1–NO.8) and their fitting lines. c Comparisons of cooling performance of the previously reported micro TECs (square) and μ-TCers in this work (circle), including \({\Delta T}_{{\text{c}}}^{{\text{ max}}}\) (Pc = 0 W) and corresponding cooling temperature control capability η. Note that the colour bar indicates their intrinsic \(R_{\text{th}}\) valves, detailed data and related references are provided in Tables S1 and S3
Furthermore, considering that the Pc value is always equal to the Ph value, as a comprehensive evaluation index, the \(R_{\text{th}}^{\text{ e}}\) = ΔT/Ph defined in this study can be described as:
According to Eq. (4), \(R_{\text{th}}^{\text{ e}}\) can be regulated by the Peltier and Joule effects, which can reflect both the temperature control range and efficiency of the μ-TCers for low-power components. In addition, we systematically analysed the effect of thermal resistances (intrinsic Rth and tunable \(R_{\text{th}}^{\text{ e}}\)) on temperature control using a heat-compensation method (Sect. S1.2), including the temperature control capability (η = ΔT/P) and coefficient of performance (COP = Pc/P).
3 Results and Discussion
3.1 Cooling for Ultra-Low Power Electronics
For an ultra-low power component (Ih = 5 μA and negligible Ph < 50 nW), the heating temperature difference continuously increases as a function of Iw from 0 to − 1 mA (Figs. 2a and S3d), due to the combined influence of Peltier and Joule effects [39]. Conversely, when Iw is reversed, the cooling temperature difference (ΔTc = Ta – Ts) decreases with an increase of Iw and reaches a minimum value before increasing (0–5 mA). Accordingly, ΔTc is decisive for the temperature control range, which is also the unique feature that distinguishes TECs from microheaters with only a heating function.
For a comparative analysis of geometric parameter effect on the cooling performance (Fig. 2b), a series of devices with different section-to-length ratios (S/L) were fabricated (labelled NO.1–NO.9 in Tables S1 and S2). As the S/L value increases, the maximum cooling temperature difference \(\Delta {T}_{\text{ c}}^{ \, {\text{max}}}\) increases, due to the relatively reduced effect of conductive heat loss through the Pt sensor (Fig. 1e), which was revealed by our simulations (Sect. S2 and Fig. S4). In contrast, the Rth value decreases as the S/L value increases because of their reciprocal relationship. As shown in Eq. (1), a large intrinsic Rth can suppress Pcon for efficient cooling, therefore, the ΔTc and Rth are two key parameters of the on-chip μ-TCer. Due to the small S/L of TE legs in our TCers, the ultra-high intrinsic Rth is two orders of magnitude higher than those of conventional TECs [40,41,42], resulting in extremely high η valves and greatly improved \(\Delta {T}_{\text{ c}}^{ \, {\text{max}}}\) (detailed comparison in Fig. 2c and Sect. S3).
Since increasing ΔTc and Rth to improve the temperature controllability and efficiency can not be simultaneously achieved, specific geometric parameters need to be re-designed based on practical applications. In this study, when the S/L value increases from 1.3 to 2.3 μm, the Rth and η valves decrease rapidly (Fig. 2b, c), but the \(\Delta T_{{\text{c}}}^{ \max }\) value increases slowly. This is due to the local temperature rise of the heat sink in this single-stage TCer. Multi-stage cooling strategies (e.g., TECs combined with water/air cooling systems [43] and multi-stage TECs [44]) can overcome this bottleneck while reducing their efficiency [43]. Notably, they are not suitable as on-chip μ-TCer that require simple and compact structures. For comprehensive considerations, the appropriate S/L value is 1.5 μm (NO.7). The temperature-dependent \(\Delta T_{{\text{c}}}^{ \max }\) values are shown in Fig. 3a. Specifically, it can achieve temperature differences of ~ 2 K to ~ 45 K at Ta of 100–380 K, a 100% improvement compared to flexible porous TE films with ordered microstructures [36]. For example, this on-chip μ-TCer can build and maintain a constant temperature region of 335 K for an ultra-low power component in a 380 K environment (Fig. S3e), making it quite suitable for the temperature control of modern microelectronics and even low-temperature electronics. Although PL increases with working pressure, resulting in temperature control losses, the industrial ~ 10-mTorr vacuum packaging [45] can ensure temperature control losses of less than 0.5% (Sect. S4).

Device thermoelectric performance. Temperature-dependent a experimental (data point) and calculated (line) maximum cooling temperature difference \(\Delta T_{{\text{c}}}^{ \max }\), b dimensionless device figure of merit ZTD. c Device Seebeck coefficient α, d thermal resistance Rth and e internal resistance R of the μ-TCers, NO.7 with dense TE films (green) and NO.9 with porous TE films (black), respectively. The inset in a shows the morphological details of the porous TE films
Figure 3 shows the temperature-dependent device TE performance of our μ-TCers, which were evaluated to explain the key role of device integration in their cooling ability. The cooling performance of the TCer (NO.7) fabricated by integrating dense and flat TE films is significantly higher than the TCer (NO.9) integrated by porous TE films (Fig. 3a). The experimental \(\Delta {T}_{\text{ c}}^{ \, {\text{max}}}\) values for the former also match the predicted values better than the latter, based on their device figure of merit (defined as [46], ZTD = \(\alpha^{2}\)×Rth/R × T in Fig. 3b). In detail, the α values of these two μ-TCers are comparable without being significantly affected by the nanoporous structure, and increase with the increasing temperature (Fig. 3c), which is consistent with the excellent performance of our TE films (Fig. S5). However, compared with Rth (Fig. 3d), the R value increases more significantly by ~ 40% at 300 K, due to the interface effect (~ 30%) and porous structure (~ 10% reduction in electrical conductivity, Fig. S5), mainly leading to the decrease in cooling performance (Fig. 3a). It can be concluded that the high cooling capacity should be attributed to the high performance of freestanding TE films and their high-quality integration to reduce interfacial effects, which all benefit from the improved density and flatness of the freestanding TE films. In addition, interface engineering is expected to further optimize the interface quality, thereby improving the cooling performance [47].
3.2 Temperature Control for Low-Power Electronics
For efficient directionally transferring Ph of low-power electronics while maintaining a stable control temperature, Pc is as essential as \(\Delta T_{{\text{c}}}\) and Rth for the μ-TCer. The Pc and COP of our μ-TCer exhibit a linear relationship with ΔT (Figs. S6 and S7), which is mainly due to the Pcon shown in Eq. (1). To further evaluate the ability of our μ-TCer to stabilize the temperature for a ~ 70-μW electronic component in a variable temperature environment, we comprehensively analysed its power consumption P calculated by Eq. (3). Figure 4a shows the P of the μ-TCer as a function of Ts and Ta, where the cyan area represents that P is less than zero, owing to its TE generation function based on the Seebeck effects [39]. The upper and lower areas close to the cyan area represent the P of TE cooling and heating, respectively. Figure 4b shows the P as a function of Ts, reaching its lowest P at a Ts of ~ 376 K (point 1, the intersection of cooling and heating P curves). The ΔT of ~ 26 K (between this Ts of ~ 376 K and Ta of 350 K) is caused by the ~ 70-μW heating effect of the component. And driven by this ΔT, this μ-TCer achieved a maximum TE power generation of 0.5 μW (comparable to the on-chip TE generators [48]), leading to a minimum P of − 0.5 μW. When this power is used for cooling or heating, P is zero, marked by the points 2 and 3 in Fig. 4b, respectively. To completely transfer the 70 μW Ph, a 55 μW P is required to eliminate ΔT (Ts = Ta = 350 K at point 4), resulting in a COP of 1.36. When Ts is below ~ 345 K, P increases rapidly with ΔT (Ta increases and/or Ts decreases) and even exceeds 100 µW, because of the overcooling in temperature (upper red area in Fig. 4a). Similarly, as the heating ΔT increases, P also increases rapidly because of the overheating (lower red area in Fig. 4a), which is consistent with the COP data in Figs. S7 and S8.

Temperature control for low-power electronics. a Dependence of power consumption P of the thermostatic control for a ~ 70-μW component on Ts and Ta, detailed data in Fig. S8. b Power consumption P versus Ts (Ta = 350 K) marked by the horizontal white dotted line in a. c Average COP versus Ts over different temperature ranges from minimum ambient temperature \({T}_{\text{ a}}^{ \, {\text{min}}}\) to 360 K. d Heating power-dependent \({R}_{\text{th}}^{\text{ e}}\) and relative thermal resistance (\({R}_{{{\text{th}}}}^{{\text{ e}}} /R_{\text{th}}\)) under various Iw at 350 K
For the same P, the cooling temperature range is notably smaller than the heating temperature range due to the counteraction and combination of the Peltier and Joule effects (Fig. 4a). Therefore, an appropriate Ts is the key to realizing efficient temperature control for low-power electronics. To obtain the optimal Ts, the variation of the average COP (\({\overline{COP}}\)) with Ts was summarized in Fig. 4c. In a variable temperature environment (from the minimum ambient temperature \({T}_{\text{ a}}^{ \, {\text{min}}}\) to 360 K), all \({\overline{COP}}\text{s}\) increase as Ts increases and reach their respective maximum values before starting to decrease. For instance, when the temperature range is from 280 to 360 K (\({T}_{\text{ a}}^{ \, {\text{min}}}\) = 280 K), the lowest average P is ~ 30 μW (Fig. S8f), leading to an ideal \({\overline{COP}}\) of 2.3 (Fig. 4c), which is comparable to the COPs of most air conditioners. Moreover, as the \({T}_{\text{ a}}^{ \, {\text{min}}}\) increases from 280 to 320 K, the maximum \({\overline{COP}}\) value increases and reaches as high as 9 in spite of the increase of optimal Ts by 10 K (Fig. 4c). Importantly, the \({\overline{COP}}\) of 6 could be achieved in wearable and implantable electronics because their Ta is always over 310 K, pointing us in a promising practical direction for our μ-TCers.
This μ-TCer aims at building a large and controllable \({R}_{\text{th}}^{\text{ e}}\) to minimise passive Pcon and achieve efficient temperature control for low-power microelectronics. Figure 4d shows the results of the \({R}_{\text{th}}^{\text{ e}}\) value calculated by Eq. (4) as a function Ph under various Iw at a Ta of 350 K, the \({R}_{\text{th}}^{\text{ e}}\) value decreases significantly as Iw increases and can be zero in cooling mode, indicating that the Ph of the microelectronic was transferred through the Peltier and Thomson effects without forming any ΔT. In particular, when Iw is zero, the \({R}_{\text{th}}^{\text{ e}}\) value is ~ 350 K mW−1, which is also the intrinsic Rth. As Iw continues to increase, the \({R}_{\text{th}}^{\text{ e}}\) value becomes negative, this is the unique feature of the TE effect – transferring heat from the low-temperature side to the high-temperature side. For a ~ 5-μW component, the \({R}_{\text{th}}^{\text{ e}}\) value can be adjusted arbitrarily within the range of ± 7.5 MK W−1 (more than ± 20 times compared to intrinsic Rth). However, it can be seen that the lower the Ph of the microelectronic, the better the temperature controllability, which makes the μ-TCer more suitable for low-power electronics.
The widely controllable \({R}_{\text{th}}^{\text{ e}}\) is critical for this μ-TCer to achieve highly energy-efficient temperature control, including the multi-levels of energy savings: (1) micro-zone temperature control; (2) ultra-high thermal resistance; (3) a combination of TE cooling, heating and generation. The high intrinsic \(R_{\text{th}}\) is mainly due to the larger geometry controllability of the S/L (Fig. 2b) compared to other integrated TE devices [48] and the low thermal conductivity of in-plane TE films, as well as avoiding heat loss from substrates [42] and gas environment (Supplementary Sect. 4). The wide tunability of \({R}_{\text{th}}^{\text{ e}}\) relies on the superior ZTD value (Fig. 3b) and the high-quality integration of dense TE films in the compact unicouple μ-TCers to reduce interfacial effects.
3.3 Controllability and Stability
To evaluate the reliability of the μ-TCer, we investigated the temperature control stability and cycling durability using an alternating Iw to drive the cooling and heating functions. Figure 5a shows that during the continuous test (including cooling and heating), the control temperature fluctuates by less than 0.1 K per cycle, and less than 0.2 K after 1000 cycles, demonstrating excellent operational stability. Note that the overall temperature variation throughout 1 h mainly comes from the fluctuating Ta instead of the changes in the control temperature, confirmed by the differences and average values of cooling and heating temperatures (Fig. S9). After excluding the effect of Ta fluctuations, the relative temperature changes of continuous operation is about 0.4% – an order of magnitude improvement over our previously reported highest value [32].

Controllability and stability of the micro TE TCer. Cycling number-dependent control temperature results of the micro TE TCer using an alternating working current (− 0.5/1.85 mA) for heating and cooling, respectively. a Continuous test results (2 s heating and 2 s cooling). b Intermittent test results during a single cycle (~ 80 ms cooling)
The effect of cycling number on control temperature was also characterized to further assess cycling durability and response time (Fig. 5b). The test period of ~ 200 ms is much longer than the time constant of the Peltier and Joule effects [49] to ensure test accuracy. The temperature change is still less than 0.2 K even after 1 million (M) cycles, showing good temperature control stability and reliability. The μ-TCer takes only ~ 4 ms to cool the heating zone from 380 to 350 K (Ta) and features a short response time of 5 ms to further reduce the temperature to 342 K (63.2%), and a total of 30 ms is enough to stabilize the temperature at 320 K during the whole 1 M cycles. This response time is comparable with that of the out-of-plane micro TECs [50] and several orders of magnitude shorter than that of traditional bulk TECs for commercial and academic research [51]. The average cooling rate of 2000 K s−1 is three orders of magnitude higher than the bulk TE coolers [33, 50], owing to its small thermal capacity and high cooling power density.
There are four factors mainly contributing to the excellent reliability: (1) the freestanding flexible films have good flexibility [52] and thus can absorb thermal stress or strain [32], thereby improving structural stability; (2) the simple unicouple structure makes its series circuit a lower risk of failure than a TEC containing hundreds of TE legs; (3) in contrast to the ampere-level Iw reported in the superlattice film-based [41, 53] or bulk [54, 55] TECs, the low Iw (~ 3 mA) has the advantage of generating less heat, as well as avoiding potential breakdown effects and electromagnetic interference on nearby electronics; (4) the vacuum packaging environment minimizes the chemical degradation of device material, thereby improving TE performance stability. Therefore, this μ-TCer can be used for precise temperature control of low-power temperature-sensitive electronics. It can also make an important contribution to the modulation of frequency for on-chip lasers [11, 12] and MEMS clocks [13, 14].
4 Conclusions
We report an on-chip micro temperature controller consisting of a unicouple of dense and flat freestanding TE films deposited on a newly developed ultra-thin GO nano membrane and further demonstrate its implementation in micro-zone thermal management for low-power temperature-sensitive microelectronic components. It combines the features of large intrinsic Rth and widely tunable \({R}_{\text{th}}^{\text{ e}}\) from positive to negative, leading to energy-efficient temperature control (\({\overline{COP}}\) > 2.3 and η > 100 K mW−1). The combination of Joule and Peltier effects gives it an ultra-fast cooling rate (2000 K s−1) and outstanding cooling temperature difference (~ 45 K). An extremely compact device structure combined with superior reliability (> 1 M) could be important guarantees for its practical applications. In conclusion, we established an unprecedented design concept, conducted temperature control analyses of the prototype devices, proposed \({R}_{\text{th}}^{\text{ e}}\) as a comprehensive performance evaluation indicator. We hope that such temperature controllers can overcome emerging challenges in the ever-developing energy-efficient microelectronics.
References
A.L. Moore, L. Shi, Emerging challenges and materials for thermal management of electronics. Mater. Today 17(4), 163–174 (2014). https://doi.org/10.1016/j.mattod.2014.04.003
L.T. Yeh, Review of heat transfer technologies in electronic equipment. J. Electron. Packag. 117, 333–339 (1995). https://doi.org/10.1115/1.2792113
K.A. Bannister, G. Giorgetti, S. Gupta, Wireless sensor networking for “Hot” applications: effects of temperature on signal strength, data collection and localization. In Proceedings of the 5th workshop on embedded networked sensors (HotEmNets’ 08). (2008), pp. 1–5
A. Beccari, D.A. Visani, S.A. Fedorov, M.J. Bereyhi, V. Boureau et al., Strained crystalline nanomechanical resonators with quality factors above 10 billion. Nat. Phys. 18, 436–441 (2022). https://doi.org/10.1038/s41567-021-01498-4
X. Xu, Q. Wang, J. Tian, L. Yang, Y. Fang et al., On the air buoyancy effect in MEMS-based gravity sensors for high resolution gravity measurements. IEEE Sens. J. 21, 22480–22488 (2021). https://doi.org/10.1109/JSEN.2021.3106667
R.P. Middlemiss, A. Samarelli, D.J. Paul, J. Hough, S. Rowan et al., Measurement of the earth tides with a MEMS gravimeter. Nature 531, 614–617 (2016). https://doi.org/10.1038/nature17397
V. Lakshminarayanan, N. Sriraam, The effect of temperature on the reliability of electronic components. 2014 IEEE International Conference on Electronics, Computing and Communication Technologies (CONECCT), (IEEE, Bangalore, India, 2014), pp. 1–6
L.T. Yeh, R.C. Chu, W.S. Janna, Thermal management of microelectronic equipment: heat transfer theory, analysis methods, and design practices. ASME press book series on electronic packaging. Appl. Mech. Rev. 56, B46–B48 (2003). https://doi.org/10.1115/1.1566408
C.T.C. Nguyen, MEMS technology for timing and frequency control. IEEE Trans. Ultrason. Ferroelectr. Freq. Contr. 54, 251–270 (2007). https://doi.org/10.1109/TUFFC.2007.240
L. Comenencia Ortiz, H.K. Kwon, J. Rodriguez, Y. Chen, G.D. Vukasin et al., Low-power dual mode MEMS resonators with PPB stability over temperature. J. Microelectromech. Syst. 29, 190–201 (2020). https://doi.org/10.1109/JMEMS.2020.2970609
M. Corato-Zanarella, A. Gil-Molina, X. Ji, M.C. Shin, A. Mohanty et al., Widely tunable and narrow-linewidth chip-scale lasers from near-ultraviolet to near-infrared wavelengths. Nat. Photonics 17, 157–164 (2023). https://doi.org/10.1038/s41566-022-01120-w
G. Liang, H. Huang, A. Mohanty, M.C. Shin, X. Ji et al., Robust, efficient, micrometre-scale phase modulators at visible wavelengths. Nat. Photonics 15, 908–913 (2021). https://doi.org/10.1038/s41566-021-00891-y
W.T. Hsu, A.R. Brown, Frequency trimming for MEMS resonator oscillators. 2007 IEEE International Frequency Control Symposium Joint with the 21st European Frequency and Time Forum, (IEEE, Geneva, Switzerland, 2007), pp. 1088–1091
J.C. Salvia, R. Melamud, S.A. Chandorkar, S.F. Lord, T.W. Kenny, Real-time temperature compensation of MEMS oscillators using an integrated micro-oven and a phase-locked loop. J. Microelectromech. Syst. 19, 192–201 (2010). https://doi.org/10.1109/JMEMS.2009.2035932
C.A. Boano, K. Römer, N. Tsiftes, Mitigating the adverse effects of temperature on low-power wireless protocols. 2014 IEEE 11th International Conference on Mobile Ad Hoc and Sensor Systems, (IEEE, Philadelphia, PA, USA, 2014), pp. 336–344
S. Olenik, H.S. Lee, F. Güder, The future of near-field communication-based wireless sensing. Nat. Rev. Mater. 6, 286–288 (2021). https://doi.org/10.1038/s41578-021-00299-8
E. Baptista, K. Buisman, J.C. Vaz, C. Fager, Analysis of thermal coupling effects in integrated MIMO transmitters. 2017 IEEE MTT-S International Microwave Symposium (IMS), (IEEE, Honololu, HI, USA, 2017), pp. 75–78
X. Lu, P. Wang, D. Niyato, D.I. Kim, Z. Han, Wireless charging technologies: fundamentals, standards, and network applications. IEEE Commun. Surv. Tutor. 18, 1413–1452 (2016). https://doi.org/10.1109/COMST.2015.2499783
L. Portilla, K. Loganathan, H. Faber, A. Eid, J.G.D. Hester et al., Wirelessly powered large-area electronics for the Internet of Things. Nat. Electron. 6, 10–17 (2023). https://doi.org/10.1038/s41928-022-00898-5
W. Arden, M. Brillouët, P. Cogez, M. Graef, B. Huizing et al., More-than-Moore white paper. (International Roadmap for Semiconductors, 2010). http://www.itrs2.net/uploads/4/9/7/7/49775221/irc-itrs-mtm-v2_3.pdf
Y. Zhang, F. Udrea, H. Wang, Multidimensional device architectures for efficient power electronics. Nat. Electron. 5, 723–734 (2022). https://doi.org/10.1038/s41928-022-00860-5
S. Datta, W. Chakraborty, M. Radosavljevic, Toward attojoule switching energy in logic transistors. Science 378, 733–740 (2022). https://doi.org/10.1126/science.ade7656
R. Mahajan, C.-P. Chiu, G. Chrysler, Cooling a microprocessor chip. Proc. IEEE 94, 1476–1486 (2006). https://doi.org/10.1109/JPROC.2006.879800
Z. He, Y. Yan, Z. Zhang, Thermal management and temperature uniformity enhancement of electronic devices by micro heat sinks: a review. Energy 216, 119223 (2021). https://doi.org/10.1016/j.energy.2020.119223
Y. Li, W. Li, T. Han, X. Zheng, J. Li et al., Transforming heat transfer with thermal metamaterials and devices. Nat. Rev. Mater. 6, 488–507 (2021). https://doi.org/10.1038/s41578-021-00283-2
F. Tian, B. Song, X. Chen, N.K. Ravichandran, Y. Lv et al., Unusual high thermal conductivity in boron arsenide bulk crystals. Science 361, 582–585 (2018). https://doi.org/10.1126/science.aat7932
K.M. Razeeb, E. Dalton, G.L.W. Cross, A.J. Robinson, Present and future thermal interface materials for electronic devices. Int. Mater. Rev. 63, 1–21 (2018). https://doi.org/10.1080/09506608.2017.1296605
R. van Erp, R. Soleimanzadeh, L. Nela, G. Kampitsis, E. Matioli, Co-designing electronics with microfluidics for more sustainable cooling. Nature 585, 211–216 (2020). https://doi.org/10.1038/s41586-020-2666-1
H. Hou, S. Qian, I. Takeuchi, Materials, physics and systems for multicaloric cooling. Nat. Rev. Mater. 7, 633–652 (2022). https://doi.org/10.1038/s41578-022-00428-x
L.L. Baranowski, G. Jeffrey Snyder, E.S. Toberer, Effective thermal conductivity in thermoelectric materials. J. Appl. Phys. 113, 204904 (2013). https://doi.org/10.1063/1.4807314
W.Y. Chen, X.L. Shi, J. Zou, Z.G. Chen, Thermoelectric coolers for on-chip thermal management: materials, design, and optimization. Mater. Sci. Eng. R. Rep. 151, 100700 (2022). https://doi.org/10.1016/j.mser.2022.100700
G. Li, J. Garcia Fernandez, D.A. Lara Ramos, V. Barati, N. Pérez et al., Integrated microthermoelectric coolers with rapid response time and high device reliability. Nat. Electron. 1, 555–561 (2018). https://doi.org/10.1038/s41928-018-0148-3
H. Bottner, Micropelt miniaturized thermoelectric devices: small size, high cooling power densities, short response time. ICT 2005.24th International Conference on Thermoelectrics, (IEEE, Clemson, SC, USA, 2005), pp. 1–8
Q. Zhang, K. Deng, L. Wilkens, H. Reith, K. Nielsch, Micro-thermoelectric devices. Nat. Electron. 5, 333–347 (2022). https://doi.org/10.1038/s41928-022-00776-0
Y. Su, J. Lu, D. Villaroman, D. Li, B. Huang, Free-standing planar thermoelectric microrefrigerators based on nano-grained SiGe thin films for on-chip refrigeration. Nano Energy 48, 202–210 (2018). https://doi.org/10.1016/j.nanoen.2018.03.054
Q. Jin, Y. Zhao, X. Long, S. Jiang, C. Qian et al., Flexible carbon nanotube-epitaxially grown nanocrystals for micro-thermoelectric modules. Adv. Mater. 35, 2304751 (2023). https://doi.org/10.1002/adma.202304751
Q. Zhu, S. Wang, X. Wang, A. Suwardi, M.H. Chua et al., Bottom-up engineering strategies for high-performance thermoelectric materials. Nano-Micro Lett. 13, 119 (2021). https://doi.org/10.1007/s40820-021-00637-z
D.M. Rowe, CRC Handbook of Thermoelectrics (CRC Press, Boca Raton, FL, 1995)
L.E. Bell, Cooling, heating, generating power, and recovering waste heat with thermoelectric systems. Science 321, 1457–1461 (2008). https://doi.org/10.1126/science.1158899
G.J. Snyder, J.R. Lim, C.K. Huang, J.P. Fleurial, Thermoelectric microdevice fabricated by a MEMS-like electrochemical process. Nat. Mater. 2, 528–531 (2003). https://doi.org/10.1038/nmat943
G. Bulman, P. Barletta, J. Lewis, N. Baldasaro, M. Manno et al., Superlattice-based thin-film thermoelectric modules with high cooling fluxes. Nat. Commun. 7, 10302 (2016). https://doi.org/10.1038/ncomms10302
Y. Chen, X. Nie, C. Sun, S. Ke, W. Xu et al., Realizing high-performance BiSbTe magnetic flexible films via acceleration movement and hopping migration of carriers. Adv. Funct. Mater. 32, 2111373 (2022). https://doi.org/10.1002/adfm.202111373
J. Mao, G. Chen, Z. Ren, Thermoelectric cooling materials. Nat. Mater. 20, 454–461 (2021). https://doi.org/10.1038/s41563-020-00852-w
A. Gross, G. Hwang, B. Huang, H. Yang, N. Ghafouri, et al., High-performance micro scale thermoelectric cooler: an optimized 6-stage cooler. TRANSDUCERS 2009 - 2009 International Solid-State Sensors, Actuators and Microsystems Conference, (IEEE, Denver, CO, USA, 2009), pp. 2413–2416
R.N. Candler, W.-T. Park, H. Li, G. Yama, A. Partridge et al., Single wafer encapsulation of MEMS devices. IEEE Trans. Adv. Packag. 26, 227–232 (2003). https://doi.org/10.1109/TADVP.2003.818062
G.S. Nolas, J. Sharp, H.J. Goldsmid, Thermoelectrics: Basic Principles and New Materials Developments (Springer, Berlin, Heidelberg, 2001)
L. Yin, F. Yang, X. Bao, W. Xue, Z. Du et al., Low-temperature sintering of Ag nanoparticles for high-performance thermoelectric module design. Nat. Energy 8, 665–674 (2023). https://doi.org/10.1038/s41560-023-01245-4
F. Kim, S.E. Yang, H. Ju, S. Choo, J. Lee et al., Direct ink writing of three-dimensional thermoelectric microarchitectures. Nat. Electron. 4, 579–587 (2021). https://doi.org/10.1038/s41928-021-00622-9
E. Younes, J. Christofferson, K. Maize, A. Shakouri, Short time transient behavior of SiGe-based microrefrigerators. MRS Online Proc. Libr. 1166, 106 (2009). https://doi.org/10.1557/PROC-1166-N01-06
H. Bottner, J. Nurnus, A. Gavrikov, G. Kuhner, M. Jagle et al., New thermoelectric components using microsystem technologies. J. Microelectromech. Syst. 13, 414–420 (2004). https://doi.org/10.1109/JMEMS.2004.828740
V.A. Semeniouk, T.V. Pilipenko, Thermoelectric coolers with small response time. Fifteenth International Conference on Thermoelectrics. Proceedings ICT ’96, (IEEE, Pasadena, CA, USA, 2002), pp. 301–306
Q. Jin, S. Jiang, Y. Zhao, D. Wang, J. Qiu et al., Flexible layer-structured Bi2Te3 thermoelectric on a carbon nanotube scaffold. Nat. Mater. 18, 62–68 (2019). https://doi.org/10.1038/s41563-018-0217-z
R. Venkatasubramanian, E. Siivola, T. Colpitts, B. O’Quinn, Thin-film thermoelectric devices with high room-temperature figures of merit. Nature 413, 597–602 (2001). https://doi.org/10.1038/35098012
J. Mao, H. Zhu, Z. Ding, Z. Liu, G.A. Gamage et al., High thermoelectric cooling performance of n-type Mg3Bi2-based materials. Science 365, 495–498 (2019). https://doi.org/10.1126/science.aax7792
Z. Liu, W. Gao, H. Oshima, K. Nagase, C.H. Lee et al., Maximizing the performance of n-type Mg3Bi2 based materials for room-temperature power generation and thermoelectric cooling. Nat. Commun. 13, 1120 (2022). https://doi.org/10.1038/s41467-022-28798-4
Acknowledgements
The authors thank D. Berger, D. Hofmann and C. Kupka in IFW Dresden for helpful technical support. H.R. acknowledges funding from the DFG (Deutsche Forschungsgemeinschaft) within grant number RE3973/1-1. Q.J., H.R. and K.N. conceived the work. With the support from N.Y. and X.J., Q.J. and T.G. fabricated the thermoelectric films and conducted the structural and compositional characterizations. Q.J. prepared microchips and fabricated the on-chip micro temperature controllers. Q.J. and N.P. carried out the temperature-dependent material and device performance measurements. Q.J. and H.R. performed the simulation and analytical calculations. Q.J., H.R. and K.N. wrote the manuscript with input from the other coauthors. All the authors discussed the results and commented on the manuscript.
Funding
Open Access funding enabled and organized by Projekt DEAL.
Author information
Authors and Affiliations
Corresponding authors
Ethics declarations
Conflict of interest
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
Supplementary Information
Below is the link to the electronic supplementary material.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Jin, Q., Guo, T., Pérez, N. et al. On-Chip Micro Temperature Controllers Based on Freestanding Thermoelectric Nano Films for Low-Power Electronics. Nano-Micro Lett. 16, 126 (2024). https://doi.org/10.1007/s40820-024-01342-3
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s40820-024-01342-3