
Abstract
Purpose: Establish a technique for simultaneous interrupted volumetric imaging of internal structure and time-resolved full-field surface strain measurements during in-situ X-ray micro-computed tomography (XCT) experiments. This enables in-situ testing of stiff materials with large forces relative to the compliance of the in-situ load frame, which might exhibit localization (e.g., necking, compaction banding) and other inhomogeneous behaviors.Methods: The system utilizes a combination of in-situ XCT, 2D X-ray imaging, and particle tracking to conduct volumetric imaging of the internal structure of a specimen with interrupted loading and surface strain mapping during loading. Critically, prior to the laboratory-scale XCT experiments, specimens are speckled with a high-X-ray-contrast powder that is bonded the surface. During in-situ loading, the XCT system is programmed to capture sequential 2D X-ray images orthogonal to the speckled specimen surface. A single particle tracking (SPT) or digital image correlation (DIC) algorithm is used to measure full-field surface strain evolution throughout the time-sequence of images. At specified crosshead displacements, the motion and 2D image sequence is paused for volumetric XCT image collection. Results: We show example results on a micro-tensile demonstration specimen additive manufactured from Inconel 718 nickel-chrome alloy. Results include XCT volume reconstructions, crosshead-based engineering stress, and full-field strain maps. Conclusion: We demonstrate an in-situ technique to obtain surface strain evolution during laboratory-scale XCT testing and interrupted volumetric imaging. This allows closer investigation of, for example, the effect of micro-pores on the strain localization behavior of additive manufactured metal alloys. In addition to describing the method using a representative test piece, the dataset and code are published as open-source resources for the community.
Graphical abstract

Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction and Motivation
To thoroughly understand the deformation mechanics of metals, or more generally optically opaque materials, efforts have been made to use X-rays to measure specimen deformation behavior in full-field 3D during applied loading or deformation. X-ray absorption can measure density-based contrast, such as caused by different phases of material (solid metal versus pores will be shown herein), while diffraction measurements can provide crystallographic information. Absorption-based X-ray radiography and X-ray Computed Tomography (XCT) have been used as a non-destructive means to measure 2D/3D deformation while loads/strains are being applied (in-situ) dating back at least to the late 20th century [1, 2]. Powerful tools for conducting both XCT and X-ray diffraction in-situ have been developed by others at synchrotron beamlines, using the high-flux environment to enable rapid imaging, minimize hold times, and/or image during continuous loading [3,4,5,6]. Using these techniques, static and dynamic loading have been studied, 3D deformations have been measured using digital volume correlation, and a wide range of materials have been investigated under diverse environmental conditions [7,8,9]. Of particular note, projection images (or radiographs) have been used as the basis for computing strains; specifically, this concept has been applied to cases where multiple deforming materials may interact within each projection image, complicating the strain tracking task [10]. However, these examples are typically applied to synchrotron sources or similar cases with rapid, high flux illumination.
In-situ load stages have also been developed for laboratory-scale XCT devices, loosely defined here as stand-alone cabinet machines that fit in a standard laboratory space or shop floor. See the review by Singh et al. for a more comprehensive discussion of XCT testing [11]. This includes the development of commercial in-situ load stages for laboratory use, such as the device manufactured by Deben [12]Footnote 1, which is used in this work. These laboratory-scale instruments make in-situ testing, and the additional data they enable, much more approachable for a wide range of researchers, practitioners, and manufacturers who in general do not have ready access to world-class synchrotron equipment. However, they do have notable drawbacks compared to synchrotron in-situ experiments (see for example Withers et al. [9] for more insightful discussion of the differences between synchrotron and laboratory systems) or traditional load-frame tests with ex-situ inspection.
One major drawback to be addressed in part herein is the difficulty in quantitative mechanical testing of stiff materials such as metals, ceramics, or composites. Current lab-scale in-situ loading systems often employ a stiff polymer (PEI in the Deben) cylinder as the load column. While excellent in terms of X-ray transparency, and allowing for the 180° or 360° rotation required for tomography, such load columns are generally not sufficiently optically transparent to image specimens, and block physical access. This makes accurate measurement of specimen strain (either total or a full-field map) difficult, since conventional solutions such as optical-light digital image correlation, extensometers, and strain gauges cannot be used. The Deben system, for instance, shows a displacement and derived strain channel that is based on a transducer measurement of the crosshead displacement. Our preliminary experiments have shown this to be highly imprecise for measurements of stiff specimens, such as the nickel-based alloy IN718 we demonstrate here. Compared to previous measurements using a conventional load frame for the exact same material (cf. [13]) the elastic stiffness measured by the Deben system was a factor of 26 lower (i.e., \(\frac{E_{conventional}}{E_{in-situ}} = 26\)). For this comparison, strain and load were measured by the Deben system and specimen cross-sectional area was measured; we computed the elastic stiffness as the slope of the linear region of the stress-strain curve, following the standard practices outlined in ASTM E111-17. Similarly, Gullane et al. [14] have reported low modulus and high elongation for Ti-6Al-4V when conducting tests with the Deben stage and attributed it to material characteristics (small gauge section/few grains). This reasoning might not be the only cause of unusual values as the description of the strain measurement is not provided in great detail. Another possible cause, for instance, is compliance in the load frame, fixtures/grips, and non-gauge part of the specimen. Although the loaded area of the PEI cylinder is much larger than that of the specimen, its elastic modulus is much lower: a cross-head based measure of displacement would effectively result in the series-spring-type convolution of the two, resulting in a substantial decrease in observed elastic modulus and increase overall displacement. Since elastic modulus and elongation are impacted, but yield and ultimate strength remain similar, compliance and poorly measured displacement is a likely culprit. Moreover, crosshead-based displacement (and derived strains) provide only bulk information, whereas correlating localization of strains to internal structure is generally of interest for in-situ mechanical testing.

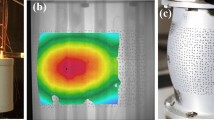
Schematic representation of the overall workflow involved in conducting these measurements. a) optical image of a specimen prepared with powder for strain measurements, b) XCT reconstruction of a specimen gauge region showing lead powder particles used to generate contrast for particle tracking; c) X-ray contrast generated by the decoration particles at zero applied deformation, and d) at about 30 % applied strain measured at the crosshead
The goal of this work is to establish a 2D surface strain mapping and total strain measurement method during in-situ testing with lab-scale instruments, taking inspiration from synchrotron radiography. This is a capability that is lacking in these instruments, which makes quantitative data collection and analysis more limited than with synchrotron-based counterparts. The key tool that permits us to measure full-field strains is the utilization of selected single X-ray projections to capture the motion of a speckle pattern. As such, contrast for the speckle pattern is made with X-ray opaque particles, which are adhered to the surface to the specimen. One benefit of this approach is that many classes of material can be tested regardless of surface or interior characteristics, whereas some previous in-situ studies using X-rays directly have relied on the selecting a material system that inherently has some sort of contrast generating phase(s), as in [15, 16]. The following sections will describe the XCT system, load frame, speckling, and displacement and strain reconstruction (“Methods”), and then demonstrate results on an additively manufactured IN718 specimen, where internal pore deformation as well as surface strains are of interest (“Demonstration Results”).
Methods
The overall technique is comprised of a series of steps, which we show schematically in Fig. 1. The specimen is first prepared for measurement, multi-modal measurements (including XCT, surface strain, and load) are then conducted, and finally the data from each measurement type is collected and analyzed. Further details for the steps along this process are described below.
X-ray Computed Tomography
Options exist for commercial laboratory XCT, and commercial in-situ load stages are either available or under development that can interface with different XCT devices. This work used a Zeiss XRadia XRM-500 and version 14 of the Scout-and-Scan control software provided with the instrument. In particular, the instrument was controlled predominately through the “advanced” mode of Scout-and-Scan Data Explorer (DX), which allows for digital control of the XCT machine in more specific ways than permitted by the scan-only software more typically used for tomography-only experiments.
In the XCT demonstrated here, the source was set at 160 kV and 10 W (maximum for this source), with a combination of geometric and optical (4X) magnification reaching a voxel-edge-length of 3.72±0.1 \(\upmu \)m (Specimen 1) or 3.57±0.1 \(\upmu \)m (Specimen 2). In the example tomographic scans given here, exposure time was generally 1.65 s, and 1101 projection images were taken through a 188\(^{\circ }\) rotation. These settings balance scan time with reconstructed image quality. Reconstruction of the projections into 3D images and subsequent export to slices in a multipage TIFF-image was conducted using the proprietary machine software. Further image processing to create 3D voxel images for visualization and measurement used either the MATLAB scripts for image processing provided by [17], or the custom Python scripts in [18].
In-situ Loading
In-situ loading capabilities were provided by the Deben Microtest CT500 NanoTomography stage (Version 3.5) (Fig. 2), fitted with a 500 N load cell. As Fig. 2 shows, physical and optical access to the specimen is limited. In the control software, crosshead displacement (elongation) is provided as a readback to the nearest micrometer, with rated displacement resolution of 3 \(\upmu \)m. However, compliance of the load frame, specimen fixture, and specimen motion outside the gauge region itself makes the accuracy and precision of this readback value highly uncertain. Preliminary experiments show signs of substantial non-specimen compliance in the stress-strain curve (specifically, exceptionally low elastic modulus, i.e., O(10) GPa versus O(100) GPa in conventional tests), if this crosshead-based displacement measurement is used to compute strain for high-force metallic specimens.

Image of the load stage with tensile specimen mounted, in the beamline of the XCT system. Primary components of the system are labelled

(a) custom tensile specimen geometry designed around the in-situ testing constraints, units of mm; (b) Von Mises stress as computed with elastic finite element analysis (reduced integration hexehedral elements (C3D8R), with pin/clamp boundary conditions modeled but not shown) confirming relatively even distribution of stresses in the gauge section when ideally pin-loaded. The value of the color scale is arbitrary for this elastic analysis, with red being high stress and blue being low
The stage has an initial opening of approximately 10 mm, and is capable of a maximum displacement of 10 mm when configured in tension test mode (for a total opening of approximately 20 mm). The specimen is fixtured by both a through-going pin to facilitate alignment and rough surface clamping jaws (secured with screws). A custom specimen geometry was designed around these geometric constraints, X-ray penetration constraints (approximately 2 mm total thickness of dense metal), and total load (500 N) constraints. The specimen geometry shown in Fig. 3. The stage is single-sided, in that one cross-head is actuated while the other is fixed with respect to the X-ray beam.
X-ray flux of this lab-scale XCT source is insufficient to record volumetric data at a suitable rate to capture deformations during crosshead motion. Full CT scans take at least 30 min for metal specimens, during which time specimen deformation would cause blurring or other artifacts even at the lowest displacement rate achievable by the Deben stage. For some cases, using customized or more complex reconstruction algorithms may be possible, but these are not readily available for this instrument. Using the load frame enables interrupted in-situ tensile testing, whereby during a single tension test displacement is stopped and held constant, during which time the specimen first relaxes and then a XCT image is collected. First introduced at synchrotron beamlines, this technique has been practiced for many years.
Quasi-static deformation was conducted at approximately 0.2 mm/min at the crosshead. This is the slowest drive rate available, and for this geometry results in an effective nominal quasi-static strain rate of \(6.6 \times 10^{-3}\) (note that throughout this paper, tensile stress and strain are positive, and compressive are negative). After an initial scan, stop points for subsequent scans were selected at roughly at yield, partway through plastic deformation, and at roughly ultimate tensile strength. Relaxation was allowed to proceed for 15 min to 30 min before each XCT scan, which allowed for crisp XCT images. Pore motion and deformation, as well as motion and deformation of other markers or unique features, can be observed during testing and quantified by comparing subsequent 3D images using tools such as IMPPY3D [18].
Measuring Surface Deformations
Deformations of specimen surface are often measured with techniques such as digital image correlation (DIC), or more broadly optical flow-based fiducial tracking, and significant efforts have been made to establish metrological efficacy of these techniques across a number of domains [19]. For in-situ XCT deformation measurements, particle tracking and digital volume correlation (DVC, the 3D volumetric extension of DIC) techniques have been applied in specifically selected material systems to track 3D motions, e.g. assessing plastic deformation and crack growth or relative motion of plies in a composite, through subsequent CT images. This concept inspired the use of 2D in-situ X-ray images, rather than optical images, to identify the surface deformation fields throughout an experiment. Volume images typically require an interrupted motion profile during the image collection, whereas the 2D surface measurement does not, because only one exposure and no stage motion is required for 2D images. X-ray images have previously been used for similar purposes, such as to combat thermal refraction [20] or for DIC directly in synchrotron applications [10, 21], a technique Lu et al. terms X-ray DIC (XDIC). However, to our knowledge this has not been applied to the real-time imaging and subsequent measurement of surface deformations with in-situ XCT in lab-scale XCT instruments.
In typical digital image correlation (DIC) deformation measurements, the optical images are taken of a specimen surface that has been decorated with locally random contrast-generating fiducial markers, e.g., speckle patterns from black paint with white over-sprayed dots. These methods typically achieve sub-pixel resolution [19]. Alternatively, in some settings, particle tracking is better able to capture deformation fields, since individual fiducials can be tracked instead of subset regions. Algorithms comparable to DIC for tracking for large numbers of particles undergoing large, complex deformations have been developed for solid mechanics applications [22, 23]. This technique generally requires fewer but more distinct and regular fiducials compared to DIC. Fluorescent markers or stenciled dots are common. These are complimentary techniques and the details of patterning and image formation dictate which technique is more performant for a given image set. For the experiments shown herein DIC and particle tracking have been evaluated and, although both are viable, particle tracking has typically offered superior performance in our testing.
As noted above, we focus on so-called interrupted in-situ testing. This simplifies the problem to capturing 2D surface deformations during loading, which can be tracked using projection images only. The loading is periodically stopped (interrupted), during which time the images required for 3D XCT are collected and projections of the speckle pattern are not, since the specimen is rotated with respect to the source during tomography. Techniques such as DIC or particle tracking can then be applied in relatively conventional manner using the 2D projection images collected at approximately 0.3 Hz to 1 Hz during quasi-static deformation. The image capture rate is tuned to provide densely-enough time-sampling of the deformation to extract relevant quantities of interest (see, for example, the DIC Good Practices Guide [24]). This requires a speckle pattern visible in the projection images, contrast generated by differences in X-ray attenuation or differences in phase, for fiducial tracking to compute surface deformation maps. In this case, we focus on attenuation contrast rather than phase contrast, and depending on the material system, speckling using an attenuation contrast generating agent. Contrast is thus generated for either particle tracking or DIC-based techniques as outlined below to measure local surface strains and total gauge strain during loading.
Speckle Pattern Generation
We developed a technique to apply highly X-ray attenuating particles to tensile specimens, such that contrast would be generated on the X-ray detector when taking projection images of the gauge region. Alternative techniques, such as sputter coating masked patterns, were found to be ineffective at making sufficient contrast on comparatively thick metallic specimens. Highly X-ray attenuating materials for the particles, such as lead or tantalum, were chosen to achieve the desired contrast. A balance of particle size is required to achieve at once sufficient contrast and sufficient number of particles to enable reconstruction of the deformation field. Particles must also be affixed such that they represent the underlying deformation of the specimen as closely as possible, for as much of the deformation as possible, but do not inhibit deformation.
Two different types of powder have been shown to be effective. Spherical gas-atomized tantalum powder sieved to between 15 \(\upmu \)m and 45 \(\upmu \)m particle size provides higher contrast and higher confidence in centroid localization (which is beneficial for particle tracking, as described below), but is quite expensive. A lower-cost option is non-spherical crushed lead powder, sieved such that the minimum particle diameter would be 20 \(\upmu \)m and the largest would be 35 \(\upmu \)m; although less ideal in terms of fidelity of deformation field reconstruction, the lower cost makes it more scaleable to larger sample sizes or more extensive experimental campaigns.
In either case, a simple, effective method is used to apply the particles with spatial density and homogeneous distribution suited to deformation capturing. A medium-strength commercial spray adhesive is first lightly applied to the face of the clean specimen. While the adhesive is still tacky, the specimen is dipped into a pool of particle powder. Excess powder is gently tapped off, and the sides of the specimen are scraped clean to minimize the excess powder around the edges. The adhesive keeps particles well-connected with the surface for even a large amount of deformation, and allows the specimens to be handled while mounting in the load frame without damaging the pattern. Optical and 3D XCT images of a decorated specimen used to demonstrate the method with lead powder are shown in Fig. 1(a) and (b). Examples of the resulting speckled projection images, and a cross-section of an XCT image to demonstrate the particle adhesion, are shown in Fig. 4.
Several different adhesives with different strength, initial viscosity, and application style were trialed to identify one that worked well to pick up our powder, but did not over-spray or adhere too many particles not on the gauge section. The specific adhesive choice may depend on the specimen material, powder material, or other conditions. Similarly, premixing adhesive and powder was also attempted, although this tended to result in a less homogeneous powder distribution on the specimen surface.

Example projection images, showing speckling patterns for two specimens: a) specimen 1, with section A-A illustrating the reconstructed cross-section from XCT, and b) specimen 2
Deformation Field Measurement
Images of a decorated specimen were collected during deformation by mounting the sample in the sample holder and then rotating the stage such that the decorated face of the specimen was perpendicular to the X-ray beam with the speckled surface facing the source, and subsequently capturing projection images during testing. The X-ray projections on the detector show the resultant speckle pattern as grayscale images (see Fig. 1(c)). System-level aberration corrections (provided by the DX software) were maintained. Initial reference images were taken, with which the projection series were normalized with bright-field correction and flattening to minimize noise, distortion, and vignetting produced by stochasticity and the cone-beam of the X-ray source. The projection images for quasi-static surface deformation measurements were collected at approximately 0.3 Hz with a 1 s exposure time. Images were collected at this rate using the “averaging” feature of the DX control software, part of the proprietary instrument “Scout-and-Scan” control software that comes with the Zeiss Xradia XRM-500. Projection image collection was halted during XCT image collection, during which time the specimen was held at constant displacement. Each stop point of the projection image collection corresponds to the start of an XCT measurement, enabling registration of the surface strain measurements and XCT measurements at those points. Those hold periods and resulting relaxations were manually removed from the processed force-time curves for ease of visualization. Complete data is available in the associated data publication, see [25].
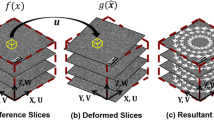
To track motion fields in the grayscale image created using 2D X-ray projections, a specialized version of the ScalE and Rotation Invariant Augmented Lagrangian Particle Tracking (SerialTrack) [23] code was developed, which we term SerialTrack-XR. This version of the algorithm follows the same basic workflow as SerialTrack, while introducing new image corrections, particle detection and feature matching methods, such as those based on the topology-based particle tracking (TPT) algorithm described in Patel et al. [22], and post-processing to estimate initial particle displacement and to project the results onto a 2D Eulerian grid for visualization and interpretation. For these finite-deformation experiments, the SerialTrack-XR method is typically used in incremental mode, comparing each image n to the next image in the sequence \(n+1\). Once an image sequence is defined, the user selects a region of interest (ROI) within the field of view of the reference image (usually the specimen surface in the first image in the sequence). These ROI images are pre-processed via a series of operations to segment and localize the particles with settings guided by user inputs, and the coordinates of each particle are linked and tracked across each frame. The linking and tracking process is a iterative, sequential application of TPT, histogram feature matching [26], and 1st-nearest-neighbor tracking. Linking and displacement guesses are made using a feed-forward strategy within an iterative refinement loop. The refinement loop uses an augmented Lagrangian regularization of the reconstructed displacement to estimate kinematically admissible under-laying displacement and deformation gradient fields at each particle location. For more details regarding the implementation of the architecture see Yang et al. [23]. An archival version of the code is available (see [27]) in addition to a version controlled repositoryFootnote 2.
After the tracking results have been computed, a post-processing step uses finite-deformation incremental-to-cumulative displacement and strain summation derived from Buyukozturk et al. [28] to convert from randomly located sample points on the surface to an Eulerian representation of the total displacement and strain tensor (either infinitesimal as \(\textbf{e} = \textbf{F} - \textbf{I}\), where \(\textbf{e}\) is the infinitesimal strain tensor, \(\textbf{F}\) is the deformation gradient tensor, and \(\textbf{I}\) is the identity matrix, or Green-Lagrange E as \(\textbf{E} = \frac{1}{2}(\textbf{F}^T \cdot \textbf{F} - \textbf{I})\)) projected onto a rectangular coordinate system in the reference (undeformed) configuration. Two methods of strain computation are available, either interpolation of the strains computed at each particle location for the augmented Lagrangian regularization or spatial differentiation of cumulative displacement results after having been projected back to the 2D Eulerian grid.
Demonstration Results
Sequential XCT Measurements
Three dimensional visualizations of the XCT images show the initial state of the outside of a specimen, including the adhered lead powder (Fig. 1(b) and Fig. 4). For the in-situ measurements, the metal is rendered as semi-transparent and the internal pores highlighted by being colored red (Fig. 5). The specimen, speckling particles, and pores can be observed to move, and in the case of the pores, change shape as load is applied between successive XCT images. About 140 pores are measured in this specimen. In this case, images were collected before loading (Fig. 5(a)), at roughly the onset of plastic deformation (Fig. 5(b)), and at two points near the ultimate tensile strength of the material (Fig. 5(c) and (d)). Visually overlaying the undeformed (blue pores) and final near-failure (red pores) images allows for a clear observation of the motion and change of shape of pores during deformation (Fig. 5(e)). The inset showing a circled pore indicates pore elongation along the tensile axis during loading, consistent with prior in-situ work on ductile metals, e.g., [4, 8, 29].

XCT scans at increasing load: a) at zero load, b) at 940 MPa, c) at 1020 MPa, and d) at 1050 MPa, using the interrupted in-situ technique. Gray is the material (rendered as translucent) and red/blue are interior pores. Dense particle decorations can be seen in the lighter gray on the surface and edges of the gauge region. The right-most images, e), show an overlay of initial (zero stress, blue pores) and final (pre-failure at 1050 MPa, red pores) images, highlighting the motion and shape change of interior voids that can be measured. Note that the top of the specimen is held fixed, and the crosshead moves the lower end of the specimen downwards when load is applied in the images
Displacement and Strain Measurements
The full-field surface displacement and strain measurement is used to compute total specimen strain (mean ± standard deviation) in the gauge section over time and investigate the evolution of the surface strain, e.g., identify areas of strain localization. An image pair showing a speckled, undeformed specimen and that specimen at 30 % crosshead strain is shown in the overall workflow, Fig. 1, part 2. This demonstrates the particle patterning achieved, and the nature of deformation to be measured using SerialTrack-XR (see Table 1 for relevant tracking settings). A video of the full strain progression of this underlying speckle pattern is given in the Supplemental Information 1.

Zero-motion and nominal rigid body measurements, shaded regions indicate ± 1 standard error. The \(e_2\)-direction is aligned with the axis of the mini-tensile specimen and the \(e_1\)-direction is orthogonal (i.e., the transverse direction of the specimen). (a) Measured mean displacement across the field of view plotted against nominal displacement from the XCT translation stage. Note that the standard error region is only marginally wider than the the lines themselves, so are practically invisible. (b) Mean strain computed from the same dataset used for (a). Note that the zero-motion data and rigid body motion data are derived from separate experiments conducted with identical settings. Insets Histograms of zero-motion and rigid body motion fields from (a) displacement and (b) strain computations

Plots of the components of the Lagrange strain tensor (transverse, longitudinal, and shear), for (a) specimen 1 (pores and surface strains shown in Fig. 8) and (b) specimen 2 (pores shown in Fig. 5). Overall strain is measured using mean surface strain in the gauge section via cumulated incremental displacement fields from the particle motion. The minor dips and plateaus are expected due to pauses during XCT volume image collection, as indicated by vertical gray bars. Uncertainty quantified as the standard error is rendered as shaded areas
Projection image series with nominally zero motion and a known amount of prescribed rigid body motion series were collected using translation stages (approximately ± 0.1 \(\upmu \)m motion precision) with the specimen installed in the Deben stage to assess noise floor and validate tracking performance against known values. Figure 6 shows representative zero-motion noise floor and rigid body motion displacement, reconstructed using SerialTrack-XR from the known-displacement image series, with inset histograms showing the distribution of motion throughout the image (from which mean is computed) for the two cases. The values are offset slightly from the nominal/prescribed value, likely due to drift or jitter during the stage and instrument initialization. The tracking results for displacement in the moving direction, Fig. 6(a), track well with the imposed motion (i.e., slope of unity), and the stationary axis remains at or near zero.
The strain in the specimen during these experiments, shown in Fig. 6(b), is nominally zero throughout, although mean measured strain is non-zero. Ideally, in these rigid body motion experiments the strain would remain zero. The observed drift in strain is likely due to several factors, including real strains imposed on the mini-tensile specimen due to drift in the fixture (both ends of the specimen were attached to the fixture to minimize vibration or wobbling during the test), and compounding errors derived from computing spatial derivatives of a noisy displacement signal or incrementally summed steps. The skewness of the distribution of histogram data for the zero-motion is due to edge-effect artifacts that are typical of these measurements. Standard error is given by \(St. Err. = \frac{St. Dev.}{\sqrt{N_{tp}}}\), where St. Dev. is the standard deviation computed from all tracked strain points and \(N_{tp}\) is the number of tracked particles. This is shown as a shaded region around each experiment trace. Note that in Fig. 6(a), the shaded region is largely obscured by the line width of the signal trace.
Two examples of total Lagrange strain versus test time computed with SerialTrack-XR are given in Fig. 7. Note that the test is paused, and time omitted, during the XCT scanning—this results in drops/plateaus in the strain, as the specimen relaxes somewhat during the time it takes to complete an XCT scan. Comparatively small transverse Lagrange strain (E\(_{11}\), where the 1-direction is across the specimen) is consistent with uniaxial loading: some amount of Poisson-effect leads to the initial negative transverse strain, after which plastic localization leads to a leveling of mean transverse strain and increasing spread of the transverse strain signal, as indicated by the widening of the colorbar ranges in Fig. 8. Meanwhile, longitudinal Lagrange strain (E\(_{22}\), where the 2-direction is aligned with the loading axis) increases after an initial, brief set-in that is typical of mini-dogbone tension experiments. The slight drops in strain partway in the strain history are associated with relaxation during XCT volumetric imaging. The two tests are of specimens made with different processing conditions, so material performance was expected to vary. This demonstrates that the measurements are, at least to a limited extent, repeatable. Testing of several more specimens, for brevity not shown, has further confirmed our ability to generate operationally similar datasets between tests.

Components of Lagrange strain and XCT images at corresponding points, at increasing levels of stress. Approximately: column 1 = 0 MPa, column 2 = 920 MPa, column 3 = 1030 MPa, and column 4 = 1090 MPa. Local strain redistribution during plastic deformation can be seen in the upper part of the specimen, aligning with the macroscopically observed strain localization (see SI 1). The behavior of largest pore, in the upper part of the specimen, is explored in more detail in Fig. 9
In addition to total gauge strains, the technique provides surface strain maps over the speckled region, as described above. For example, Fig. 8 shows the transverse E\(_{11}\), axial E\(_{22}\), and shear E\(_{12}\)components of strain mapped onto the reference configuration at progressively increasing stress levels corresponding to the XCT images rendered at the bottom of the figure. After an initial period of uniform deformation, a strain localization band develops in the top quarter of the gauge region; this can be seen qualitatively in the XCT images and is quantified by the surface strain maps. Note that the contour colormap range on Fig. 8 E\(_{11}\) and E\(_{12}\) is relatively small compared to E\(_{22}\). Because surface strain maps and XCT deformation snapshots can be paired (i.e., the final strain map before stopping to conduct an XCT measurement corresponds to the applied deformation during that XCT scan), the multimodal data can be used to interpret the role of sub-surface pores in the surface deformation behavior: growth of one larger pore and its combination with a nearby smaller pore were spatially correlated with plastic localization and eventual failure. More confident interpretation is possible than with surface strain maps, XCT, or post-failure fractography taken separately. For this case, a trace of this large pore can be seen on the fracture surfaces (see Appendix A), but may not have otherwise been identified as a critical feature. Note that the actuation of the load frame is one-sided: one crosshead moves downwards from the bottom of the specimen and the top crosshead is fixed. This results in the part of the specimen moving out of the field of view of the projection image detector when deformation is large, and the truncation of the strain maps in the far right column in Fig. 8.

Deformation the single large pore observed at the top of Specimen 1, in the context of the nearby surface strain. Mean strain is given by the green line (shaded region represents the minimum and maximum strain over the averaging area), pore volume is given by the brown line (shaded region represents combined voxel size and segmentation uncertainty). Pore volume increases with strain. Most of the observed pore growth occurred during the initial strain step, which was mostly elastic deformation, whereas the axial surface strain shows localization of strain at and around the pore at a level well above the global strain but accumulating in a broadly similar form. Steps shown here correspond to the global maps and full specimen volume images also shown in Fig. 8
Measurements of local pores, their nearby surface strains, and the overall stress can also be made. Figure 9 shows the single largest pore, which is responsible for failure, in Specimen 1 in more detail as is grows and merges with a nearby pore with increasing strain. Pore volume of the local region of this pore is computed for each XCT scan and shown with stress and local surface strain history. Minimum and maximum local strain within the surface patch are given by the shaded region around the mean strain, showing that strain tends to polarize once localization occurs. Pore volume uncertainty (shaded brown region) is based on resolution uncertainty from the pixel size calibration and segmentation uncertainty during image processing. Segmentation uncertainty is approximated by computing the pore size using a threshold value 5 % below and above the identified “optimal” value of the threshold for each scan. The lower value of the range given in Fig. 9 is then computed by multiplying the number of voxels in the pores in the image subset given the lower segmentation threshold by the lower bound of voxel size uncertainty. The upper bound in the figure is computed similarly, by multiplying the number of pore-voxels in the higher segmentation threshold by the higher bound voxel size. Although other sources of uncertainty exist in quantifying XCT images, the combination of these two factors likely represent the majority of the pore size uncertainty. Note also that the uncertainties between sequential images are linked - we would expect both resolution and segmentation uncertainty to trend similarly, i.e., the trend in the curve will likely be preserved even if it shifts within the uncertainty bounds.
Discussion
In-situ mechanical testing provides greater insight into the mechanical performance of solid materials than does either testing or XCT independently. The techniques outlined here allows for deformation and strain measurement during such in-situ testing, with greater specificity than has been previously reported for cabinet XCT systems. Although the experiments shown are for parallel-sided, rectangular cross-section specimens, with some care taken to achieving uniform perceived particle density, the technique could be applied to other specimen shapes, such as cylindrical cross-section specimens, shear-notched plates, or 3-point bend specimens, although only in-plane motion will be captured. Further work may explore these configurations more thoroughly.
In some classes of material (i.e., those with sufficient inherent contrast), digital volume correlation (DVC) might be a desirable alternative to compute strains, and would not require the technique we propose. However, our technique provides several advantages over DVC:
-
1.
It largely avoids a fundamental limitation in the DVC-based approach: due to the region-based correlative nature of DVC, surface strains are of generally poor quality due to edge effects ubiquitous to DIC/DVC methods.
-
2.
It is more generalizable: using DVC is fundamentally limited by the inherent contrast in the material being tested - some materials (e.g., rocks or cementitious materials, nodular cast iron, foams) have sufficient internal structure to provide passable DVC results without further alteration, however, these are limited to a small subset of materials. Whereas our method has no inherent material limitations: much like conventional mechanical testing with particle tracking or DIC, well-bonded fiducials with high contrast are necessary and sufficient. Metals, composites, polymers, or minerals would all be possible to measure.
-
3.
It enables deformation measurement during load application in situ: for DVC the maximum temporal frequency at which strain can be measured is that of the XCT scan frequency, which for practical reasons is generally limited to 5-10 points along the stress-strain curve, or equivalently minutes to hours of wait time. This leaves significant unaddressable time gaps, during which strains are unknown. For instance, relaxation during the hold cannot be measured and may be important for elasto-visco-plastic materials. Also, elastic stiffness is very difficult to assess from DVC, since sufficient scans are required to determine a linear-elastic region and each scan may introduce unwanted artifacts.
In the technique described above, we have employed single particle tracking-based measurements. Digital image correlation may also be straightforwardly applied. Due to the limited dimensions of the mini-tensile specimens or other small test-pieces used for benchtop XCT and grayscale contrast limitations in the single-projection images, we have experimentally determined that particle tracking generally provides superior results compared to qDIC [30] or AL-DIC [31]. Particle tracking can offer higher spatial frequency resolution (e.g., for measuring local crack tip propagation) with densely seeded trackers than is achievable with correlation-window based techniques such as DIC or particle image velocimetry (PIV). However, DIC can provide more well-conditioned displacement fields and is less prone to jitter-type errors that appear in particle tracking techniques due to centroid localization uncertainty, particularly for irregular particles [22]. In some applications, DIC-based tracking may be desirable and thus we have also included an AL-DIC-based option, called Augmented Lagrangian Digital Image Correlation with Quadtree meshing for X-Ray Projection images (ALDICq-XR), in the code repository for this technique. This choice will depend on the XCT instrument, test-piece, patterning method, and intended use for the resultant data.
Challenges and Limitations
Several factors still limit the methods herein. Some are physical limitations while others are related to the hardware and software used and could be remediated with more direct access to the system internals or other advancements in hardware and software:
-
Contrast of speckles versus speckle particle size: while small particles are desirable for good adhesion and increase resolution of the displacement measurement, smaller particles attenuate X-rays less and thus have lower contrast. These competing factors must be balanced, which drive limitations on the minimum length scale of particles and the minimum resolvable displacement.
-
Choice of powder composition: more attenuating particles will provide stronger contrast, however, particle material that attenuates too much can cause beam hardening, shadowing, or other unwanted artifacts. Lead and tantalum both seem reasonably effective when paired with IN718, as used here. However, for other base materials, different particles compositions might be more effective. Optimization of the attenuation ratio between speckling phase and material of interest is worth considering for future uses of the technique.
-
Particle adhesion: although the technique described above results in generally good adhesion of particles, there is no assurance that particles track the specimen surface motion perfectly. Particles may also disassociate from the specimen at larger strains, reducing the tracking quality. Particles may also either be generated (a cluster of sub-particles spitting into multiple discrete particles) or destroyed (becoming un-attached or splitting so that not enough contrast is generated); previous testing of the algorithms in [22] and [23] found the them to be fairly robust to these types of artifacts overall, but it still may have an impact on the results.
-
Frame and scan time: to obtain sufficient contrast during deformation and during XCT scans, enough time has to be spent while collecting each projection, i.e., an appropriate exposure time should be selected. For the quasi-static tests shown here, the time is selected to optimize detector counts; in dynamic testing, this would have to be balanced with possible blurring caused by motion during image collection. Further, scans themselves take on the order of one hour, during which time the specimen undergoes relaxation. For as-built IN718 this does not seem to substantially impact the overall behavior and is not significant enough to cause blurring, but it is material dependent and should be considered when choosing a testing modality.
-
Resolution of the projections: during projection collection, one is limited by the detector size relative to the specimen size when choosing an operating pixel pitch. Tensile geometries tend to be slender, which often means a lower resolution and a smaller subset of the detector is used than would be ideal.
-
Sample size and geometry: the current sample size and geometry is dictated by the load cell capacity and frame design. Other in-situ frames may have different constraints. In general, in order to get sufficient X-ray penetration, miniature test coupons (compared to, e.g., standardized test geometries) will likely be necessary.
-
Timings: a current challenge with this implementation is the lack of a means to precisely synchronize timing between the load cell and the CCD camera (X-ray detector) capturing projection images. This issues is specific to our XCT system, not general for the method—in theory it should be relatively easy. The camera has a triggering system and its log files report image times (to the nearest ms) and the load cell has an internal quartz clock providing highly accurate internal synchronization, there is no pathway to connect these, even post test, since timing from the load cell is never reported or used outside of the control hardware itself.
Outlook
Despite the limitations outlined above, we have demonstrated a viable method to capture surface and total strains during in-situ mechanical testing on laboratory-scale XCT instrumentation, using existing hardware and software that can be purchased today, and leveraging open source software co-developed by the authors [18, 23]. We demonstrated it on additively manufactured IN718, where internal pore deformation can be observed in the context of surface strains. Strain localization can be contextualized with a local pore, as in Fig. 8, where both E\(_{11}\) and E\(_{22}\) highlight the necked region (and eventual failure location), which appears in the XCT image as a narrowing of the gauge section (due to the Poisson-effect). Shear strains remain relatively small, although hotspots develop especially after the onset of localization. In this example, eventual failure is easily demonstrated as transecting the largest pore, which extended and linked up with a nearby smaller pore as load increased. Thus, this added information obtained from surface strain maps obtained during the deformation process is helpful in interpretation of the 3D XCT results and the specimen behavior at the ultimate strength limit.
The experiments could be augmented by incorporating digital volume correlation DVC if sufficient contrast exists within the specimen volume. Low temporal frequency DVC, i.e., from the full XCT volumes collected during loading pauses, would provide volumetric motion and deformation fields, which could be cross-compared to the surface strain maps at selected increments. One might consider such a scheme for measuring more complex 3D shapes, such as foams [16], where the internal strain would informative to correlate, for example, propagation of compaction bands from collapse of weak internal structures to eventual, delayed, development of strain localization measurable on the specimen surface. The surface strain may also be used to inform the testing routine, for example to design time-sequencing to avoid viscoelastic motion effects during the volume image pauses or to inform critical strain levels for volume imaging during a quasistatic failure process.
Using multimodal loading, XCT, and motion mapping with projection images could provide insight for a range of mechanics problems. For instance, strains in thermally sensitive components for semiconductor electronics could be measured during heating and cooling dynamically in 2D (provided a contrast mechanism) and at steady-state in 3D, even if visually obscured in multi-layer packaging. The 3D deformation patterns of more complex geometrical specimen designs could be more more thoroughly understood, especially if contrast agents could be intelligently applied to specific planes within them. Shear and compression deformation in other metals, or other materials, could also be studied. In bio-relevant soft materials with low X-ray opacity, one could measure more dynamic behavior, such as pressurization of vascular-mimetic channels and the accompanying fluid-structure interactions, especially with recent developments such as Path-Integrated DIC [10] to help deconvolute the motion field.
Conclusions
The work presents a technique to extend the use of laboratory-scale, tube-source X-ray CT for quantifiable measurement of total and surface strains during in-situ mechanical testing using commercial apparatuses. Previously, only total strain as computed from crosshead motion was available, which provides some qualitative notion of deformation but is unrepresentative of the gauge section strain, and thus inappropriate for any quantitative measurement. Adding quantitative strain information to 3D in-situ images provides additional context for the observed behavior of, e.g., interior pores. Local surface deformations were formerly unmeasured for such tests, and can provide added insight into localization and near-failure deformations, beyond what has previously been reported with laboratory-scale in-situ XCT.
Data and Code Availability
The complete data associated with the method development and results discussed are available from: https://doi.org/10.18434/mds2-3127 [25].
The SerialTrack-XR code, including an example case and supporting analysis scripts is published on the National Institute of Standards and Technology institutional GitHub page and an archival version is stored on the Public Data Repository: https://github.com/usnistgov/SerialTrackXR, respectively [27].
Notes
Certain commercial equipment, instruments, or materials are identified in this paper in order to specify the experimental procedure adequately. Such identification is not intended to imply recommendation or endorsement by NIST, nor is it intended to imply that the materials or equipment identified are necessarily the best available for the purpose.
References
Russell SS, Sutton MA (1989) Strain-field analysis acquired through correlation of X-ray radiographs of a fiber-reinforced composite laminate. Experiment Mech 29(2):237–240. https://doi.org/10.1007/BF02321382
Bay BK, Smith TS, Fyhrie DP, Saad M (1999) Digital volume correlation: Three-dimensional strain mapping using X-ray tomography. Experimental Mech 39(3):217–226. https://doi.org/10.1007/BF02323555
Beckmann F, Grupp R, Haibel A, Huppmann M, Nöthe M, Pyzalla A, Reimers W, Schreyer A, Zettler R (2007) In-Situ Synchrotron X-Ray Microtomography Studies of Microstructure and Damage Evolution in Engineering Materials. Adv Eng Mater 9(11):939–950. https://doi.org/10.1002/adem.200700254
Maire E, Carmona V, Courbon J, Ludwig W (2007) Fast X-ray tomography and acoustic emission study of damage in metals during continuous tensile tests. Acta Materialia 55(20):6806–6815. https://doi.org/10.1016/j.actamat.2007.08.043
Buffiere J-Y, Maire E, Adrien J, Masse J-P, Boller E (2010) In Situ Experiments with X ray Tomography: an Attractive Tool for Experimental Mechanics. Experiment Mech 50(3):289–305. https://doi.org/10.1007/s11340-010-9333-7
Schuren JC, Shade PA, Bernier JV, Li SF, Blank B, Lind J, Kenesei P, Lienert U, Suter RM, Turner TJ, Dimiduk DM, Almer J (2015) New opportunities for quantitative tracking of polycrystal responses in three dimensions. Current Opinion Solid State Mater Sci 19(4):235–244. https://doi.org/10.1016/j.cossms.2014.11.003
Stock SR (2008) Recent advances in X-ray microtomography applied to materials. Int Mater Rev 53(3):129–181. https://doi.org/10.1179/174328008X277803
Kafka OL, Yu C, Cheng P, Wolff SJ, Bennett JL, Garboczi EJ, Cao J, Xiao X, Liu WK (2022) X-ray computed tomography analysis of pore deformation in IN718 made with directed energy deposition via in-situ tensile testing. Int J Solids Struct 256:111943. https://doi.org/10.1016/j.ijsolstr.2022.111943
Withers PJ, Bouman C, Carmignato S, Cnudde V, Grimaldi D, Hagen CK, Maire E, Manley M, Du Plessis A, Stock SR (2021) X-ray computed tomography. Nature Rev Methods Primers 1(1):18. https://doi.org/10.1038/s43586-021-00015-4
Jones EMC, Fayad SS, Quintana EC, Halls BR, Winters C (2023) Path-Integrated X-Ray Images for Multi-Surface Digital Image Correlation (PI-DIC). Experimental Mechanics. https://doi.org/10.1007/s11340-023-00949-8
Singh SS, Chawla N (2019) 3D/4D X-Ray microtomography: Probing the mechanical behavior of materials. Handbook of Mechanics of Materials 2013–2033. https://doi.org/10.1007/978-981-10-6884-3_47
CT500 500N in-situ tensile stage for \({\upmu }\)XCT applications. https://deben.co.uk/tensile-testing/%C2%B5xct/ct500-500n-in-situ-tensile-stage-%C2%B5xct-applications/. Accessed: 2022-05-19 (2022)
Watring DS, Benzing JT, Hrabe N, Spear AD (2020) Effects of laser-energy density and build orientation on the structure-property relationships in as-built inconel 718 manufactured by laser powder bed fusion. Additive Manufact 36:101425. https://doi.org/10.1016/j.addma.2020.101425
Gullane A, Murray JW, Hyde CJ, Sankare S, Evirgen A, Clare AT (2022) Failure modes in dual layer thickness Laser Powder Bed Fusion components using a novel post-mortem reconstruction technique. Additive Manufact 59:103186. https://doi.org/10.1016/j.addma.2022.103186
Buljac A, Shakoor M, Neggers J, Bernacki M, P-oBL Helfen, Morgeneyer TF, Hild F (2017) Numerical validation framework for micromechanical simulations based on synchrotron 3D imaging. Comput Mech 59(3):419–441. https://doi.org/10.1007/s00466-016-1357-0
Landauer AK, Kafka OL, Moser NH, Foster I, Blaiszik B, Forster AM (2023) A materials data framework and dataset for elastomeric foam impact mitigating materials. Scientific Data 10(1):356. https://doi.org/10.1038/s41597-023-02092-4
Kafka OL, Yu C, Cheng P, Wolff SJ, Bennett JL, Garboczi EJ, Cao J, Xiao X, Liu WK (2022) Dataset: X-ray computed tomography analysis of pore deformation in IN718 made with directed energy deposition via in-situ tensile testing. https://doi.org/10.18434/mds2-2512
Moser NH, Kafka OL, Landauer AK (2023) IMPPy3D: 3D X-ray Computed Tomography Image Processing in Python. https://doi.org/10.18434/mds2-2806
Schreier H, Orteu J-J, Sutton MA (2009) Image Correlation for Shape. Springer, Motion and Deformation Measurements. https://doi.org/10.1007/978-0-387-78747-3
Jones EMC, Quintana EC, Reu PL, Wagner JL (2020) X-Ray Stereo Digital Image Correlation. Experiment Techniques 44(2):159–174. https://doi.org/10.1007/s40799-019-00339-7
Lu L, Fan D, Bie BX, Ran XX, Qi ML, Parab N, Sun JZ, Liao HJ, Hudspeth MC, Claus B, Fezzaa K, Sun T, Chen W, Gong XL, Luo SN (2014) Note: Dynamic strain field mapping with synchrotron x-ray digital image correlation. Rev Scientific Instruments 85(7):076101. https://doi.org/10.1063/1.4887343
Patel M, Leggett SE, Landauer AK, Wong IY, Franck C (2018) Rapid, topology-based particle tracking for high-resolution measurements of large complex 3D motion fields. Scientific Reports 8(1):5581. https://doi.org/10.1038/s41598-018-23488-y
Yang J, Yin Y, Landauer AK, Buyukozturk S, Zhang J, Summey L, McGhee A, Fu MK, Dabiri JO, Franck C (2022) SerialTrack: ScalE and rotation invariant augmented Lagrangian particle tracking. SoftwareX 19:101204. https://doi.org/10.1016/j.softx.2022.101204
Jones EM, Iadicola MA et al (2018) A good practices guide for digital image correlation. International Digital Image Correlation Society 10
Kafka OL, Landauer a, Alexander K (2023) Dataset: A technique for in-situ displacement and strain measurement with laboratory-scale X-ray Computed Tomography. https://doi.org/10.18434/mds2-xxxx
Janke T, Schwarze R, Bauer K (2020) Part2Track: A MATLAB package for double frame and time resolved Particle Tracking Velocimetry. SoftwareX 11:100413. https://doi.org/10.1016/j.softx.2020.100413
Landauer AK (2023) Code for SerialTrack-XR particle tracking. https://doi.org/10.18434/mds2-3118
Buyukozturk S, Landauer AK, Summey LA, Chukwu AN, Zhang J, Franck C (2022) High-Speed, 3D Volumetric Displacement and Strain Mapping in Soft Materials Using Light Field Microscopy. Exp Mech. https://doi.org/10.1007/s11340-022-00885-z
Benzing JT, Liew LA, Hrabe N, DelRio FW (2020) Tracking Defects and Microstructural Heterogeneities in Meso-Scale Tensile Specimens Excised from Additively Manufactured Parts. Exp Mech 60(2):165–170. https://doi.org/10.1007/s11340-019-00558-4
Landauer AK, Patel M, Henann DL, Franck C (2018) A q-Factor-Based Digital Image Correlation Algorithm (qDIC) for Resolving Finite Deformations with Degenerate Speckle Patterns. Exp Mech 58(5):815–830. https://doi.org/10.1007/s11340-018-0377-4. Accessed 2022-10-12
Yang J, Bhattacharya K (2019) Augmented Lagrangian Digital Image Correlation. Exp Mech 59(2):187–205. https://doi.org/10.1007/s11340-018-00457-0
Acknowledgements
This research was performed in part while O.K., A.L. and N.M. held NRC Research Associateship awards at NIST. The authors would like to thank Dillon Watring and Ashley Spear for sharing the IN718 material with us.
Funding
No external funding was used for this work.
Author information
Authors and Affiliations
Contributions
OLK: conceptualization and design, XCT, sample preparation, analysis, writing/editing; AKL: software, analysis, writing/editing; J.T.B.: sample preparation, microscopy, resources, writing - review and editing; N.H.M: XCT, software; EM: sample preparation, design, writing/editing, resources; E.J.G.: XCT, resources, supervision.
Corresponding author
Ethics declarations
Competing Interests
The authors declare they have no competing interests.
Ethics approval
This work has been approved by NIST’s internal editorial review board and found suitable for publication.
Consent for publication
All authors have read and agreed to the contents of this manuscript and agree to be listed as authors.
Disclaimers
The opinions, recommendations, findings, and conclusions in the manuscript do not necessarily reflect the views or policies of NIST or the United States Government.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
A.K. Landauer is a member of SEM
This manuscript is a contribution of the National Institute of Standards and Technology and is not subject to copyright in the United States
The original article has been updated.
Appendices
Appendix A Fractography for Specimen 1
Figure 10 shows SEM micrographs, 3D optical imgages, and 3D rendered XCT images of the two sides of the failure surface for Specimen 1. The inset in Fig. 10(a)i shows the suspected large pore location, as evidenced by what appears to be a hole-like feature protruding away from the fracture surface. Since this is now surface-connected, it would not have been highlight in red in Fig. 8.

Fractographic images of a) the upper/shorter side of the failed specimen, and b) the lower/longer side of the failed specimen. Sub-images i) show SEM micrographs of the surface; ii) show optical images, iii) show optical height maps, and iv) show XCT renderings
SI 1
Video of deformation progress.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Kafka, O.L., Landauer, A.K., Benzing, J.T. et al. A Technique for In-Situ Displacement and Strain Measurement with Laboratory-Scale X-Ray Computed Tomography. Exp Tech (2024). https://doi.org/10.1007/s40799-024-00715-y
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s40799-024-00715-y