
Abstract
In this paper, we study a diffusive SIR epidemic model with saturated incidence rate and discontinuous treatments under Neumann boundary conditions. Firstly, the existence and boundedness of the solution of the system are addressed. Then, on the basis of the differential inclusions theory, we analysis the existence of endemic equilibrium. Furthermore, by constructing different appropriate Lyapunov functions, we investigate the global asymptotic stability of the disease free equilibrium(DFE) and the endemic equilibrium(EE), respectively. Additionally, numerical simulations are given to confirm the correctness of theorem. Finally, we give a brief conclusion and discussion in the end of the paper.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Nowadays, The SARS-Cov-2 pandemic pose a great threat to human health, which has introduced an evident research boom into biophysical and mathematical modeling of infection expansions. In order to develop control strategies to prevent disease epidemics and reduce the number of infections, many scholars have used mathematical models of reaction-diffusion equations to study the infection mechanisms of infectious diseases, for example in [1,2,3,4,5,6]. Moreover, reaction -diffusion mechanisms have been successfully applied to many patterning phenomena in predator-prey system [7,8,9,10,11,12].
It should be noted that most of the above models have continuous terms. But in practice, when an infectious disease occurs in the host population, some treatment measures need to be considered, which usually was described by some discontinuous (or non-smooth) control functions when constructing the mathematical model. Moreover, the discontinuous control strategy has been also extensively studied in many other resource management areas in real life. For instance, discontinuous harvesting on fishery was investigated in [13]. Li et al. [14] studied the the dynamic behaviour of a computer worm virus system with discontinuous control
strategy. In [15], Guo et al. considered the impact of discontinuous treatments to SIR epidemic system. Zhang and Zhao considered a predator-prey model with discontinuous harvesting policy with spatial diffusion in [16]. However, there are few results in the public literature on the effects of discontinuous treatments in SIR epidemic diffusive system. Recently, in [17], Li et al. studied the global dynamics of a diffusive SIR epidemic system with linear incidence rate and discontinuous term. Other relate work can be found in [18,19,20].
Inspired by [17] and the above discussions. In this article, we consider a diffusive SIR epidemic model with nonlinear saturated incidence rate and discontinuous treatments. First, we denote the densities of susceptible and infected individuals at position x and time t by S(x, t) and I(x, t), respectively. Besides, a saturated incidence rate function \(g(I)=\frac{\beta I}{1+mI}\) is considered, which was first proposed by Capasso and Serio in [21], subsequently, many scholars have done relevant research about this type of incidence rate (for example, [22,23,24]). Where \(m>0\) is the saturation coefficient, \(\beta >0\) is the rate of disease transmission. This incidence rate seems to be more realistic in some cases, as the number of effective contacts between infected and susceptible individuals may be saturated at high levels of infection due to congestion in infected individuals or protective measures in susceptible individuals. Therefore, we focus on the following epidemic reaction-diffusion model under Neumann boundary conditions
where S(x, t), I(x, t) and m are described as before. \(\Omega \) is a bounded open set in \(R^{n}\), n is the outward unit normal vector of the boundary \(\partial \Omega \). The homogeneous Neumann boundary conditions indicate that the epidemic system is self-inclusion and zero population flux across the boundary. \(d_1 > 0\) and \(d_2 > 0\) are the diffusion rates of susceptible and infected individuals, respectively. And the positive number A is the recruitment rate of susceptible individuals. The positive coefficients \(\mu \) and \(\mu _{1}\) represents natural mortality and mortality caused by diseases, respectively. Function h(I) represents the treatment strategy which \(\lambda \) is positive coefficient. We give some properties of function h(I) as follows.
-
(H1)
h(I) is continuous except in a cluster of countable isolated points \({\rho _{k}}\), where \(h(\rho _{k}^+)\) and \(h(\rho _{k}^-)\) represents the right and left limits, respectively, with \(h(\rho _{k}^+)>h(\rho _{k}^-)\). Besides, h(I) has a finite discontinuous points in any compact interval \([0,+\infty )\).
-
(H2)
h(I) is monotonically non-decreasing in \([0,+\infty )\), \(\forall I \in [0, +\infty )\), \(0\le h(I)\le 1 \) and \(h(0) = h(0^{+}) = 0\).
Due to the function h(I) is not continuous, here, we applying differential inclusion theory instead of theories and methods in ordinary differential equations, So the system (1.1) can be written as the following differential inclusion
where \({\overline{co}}[h(I)]=[h(I^{-}), h(I^{+})]\), \(h(I^{-}), h(I^{+})\) represent the left and right limits of function h at I, respectively.
Remark 1.1
\({\overline{co}}[h(I)]\) is an interval with non-empty interior when h is discontinuous at I, while \({\overline{co}}[h(I)] = h(I)\) is a singleton if h is continuous at I.
When saturation coefficient \(m=0\), the nonlinear saturated incidence rate become the linear incidence rate, which is corresponding to the system in literature [17]. To the best of the authors’ knowledge, there are few analysis results about diffusive SIR epidemic model with saturated incidence rate and discontinuous term in the open literature. The aim of this paper is to investigate whether we can conclude some different dynamic behaviour of the system (1.1) owing to the saturated incidence rate, and whether saturation coefficient m will affects the global stability of the endemic equilibrium of system (1.1). The rest of this paper is arranged as follows. Firstly, we mainly investigate the existence and some properties of the solution of the diffusive epidemic system (1.1) in Sect. 2. Secondly, we discuss about the existence of the endemic equilibrium of the system in Sect. 3. Thirdly, by constructing different suitable Lyapunov functions, we prove the global asymptotic stability of the disease free equilibrium(DFE) and endemic equilibrium(EE) respectively in Sect. 4. Finally, we give a brief conclusion in Sect. 5.
2 The existence of solution
In this section, we are concerned with the existence and properties of the solution of the system (1.1). Firstly, we assume that the initial values S(x, 0), I(x, 0) of system (1.1) satisfy the following condition.
(H3) \(S(x,0), I(x,0)\in L^{\infty }\), \(S(x,0)>0\) and \(I(x,0)>0\) on \(\Omega \).
Lemma 2.1
Suppose that the assumptions (H1-H3) hold, then there exist two positive constants \(M_{1}\) and \(M_{2}\), which depend on \(A, \beta , m, \mu , \mu _{1},\lambda \) and initial values \(S_{0}, I_{0}\), such that every possible solution (S(x, t), I(x, t)) of system (1.1) satisfy
Proof
Firstly, to prove the boundedness of solutions \((S(x, t), I(x, t))\), we give the invariant rectangle \(\Sigma :=[{\mathcal {S}}_{1}, {\mathcal {S}}_{2}] \times [{\mathcal {I}}_{1}, {\mathcal {I}}_{2}]\), where
Obviously, \(S_0(x)\) and \(I_0(x)\) are closed for the rectangle \(\Sigma \). The vector field of the system (1.1) is given
all points on the rectangle \(\Sigma \) point inside. Secondly, through the above analysis, we have the following conclusions:
-
(i)
On the left side of the first quadrant invariant rectangle with \(S={\mathcal {S}}_{1}\), \({\mathcal {I}}_{1}<I<{\mathcal {I}}_{2}\), by the definition of \({\mathcal {S}}_{1}\), it satisfies the following estimate:
$$\begin{aligned}&\displaystyle A-\frac{\beta SI}{1+mI}-\mu S=A-\frac{\beta {\mathcal {S}}_{1}I}{1+mI}-\mu {\mathcal {S}}_{1}\nonumber \\&\quad >A-\frac{\beta {\mathcal {S}}_{1}}{m}-\mu {\mathcal {S}}_{1}\ge 0. \end{aligned}$$(2.4) -
(ii)
On the right side of the the first quadrant invariant rectangle with \(S={\mathcal {S}}_{2}\), \({\mathcal {I}}_{1}<I<{\mathcal {I}}_{2}\), by the definition of \({\mathcal {S}}_{2}\), it satisfies the following estimate:
$$\begin{aligned}&\displaystyle A-\frac{\beta SI}{1+mI}-\mu S=A-\frac{\beta {\mathcal {S}}_{2}I}{1+mI}-\mu {\mathcal {S}}_{2}\nonumber \\&\quad <A-\mu {\mathcal {S}}_{2}\le 0. \end{aligned}$$(2.5) -
(iii)
On the bottom side of the the first quadrant invariant rectangle with \(I={\mathcal {I}}_{1}\), \({\mathcal {S}}_{1}<S<{\mathcal {S}}_{2}\), by the definition of \({\mathcal {I}}_{1}\), it satisfies the following estimate:
$$\begin{aligned}&\displaystyle \frac{\beta SI}{1+mI}-\mu _{1}I-\lambda {\overline{co}}[h(I)]I=\frac{\beta S{\mathcal {I}}_{1}}{1+m{\mathcal {I}}_{1}}-\mu _{1}{\mathcal {I}}_{1}\nonumber \\&\quad >\frac{\beta {\mathcal {S}}_{1}{\mathcal {I}}_{1}}{1+m{\mathcal {I}}_{1}}-\mu _{1}{\mathcal {I}}_{1}\ge 0. \end{aligned}$$(2.6) -
(iv)
On the left side of the the first quadrant invariant rectangle with \(I={\mathcal {I}}_{2}\), \({\mathcal {S}}_{1}<S<{\mathcal {S}}_{2}\), by the definition of \({\mathcal {I}}_{2}\), it satisfies the following estimate:
$$\begin{aligned}&\displaystyle \frac{\beta SI}{1+mI}-\mu _{1}I-\lambda {\overline{co}}[h(I)]I=\frac{\beta S{\mathcal {I}}_{2}}{1+m{\mathcal {I}}_{2}}-\mu _{1}{\mathcal {I}}_{2} -\lambda {\mathcal {I}}_{2}\nonumber \\&\quad <\frac{\beta {\mathcal {S}}_{2}}{m}-\mu _{1}{\mathcal {I}}_{2}-\lambda {\mathcal {I}}_{2}\le 0. \end{aligned}$$(2.7)
Finally, by virtue of the definition on [20], in view of the above discussions, we can conclude that \(\Sigma :=[{\mathcal {S}}_{1}, {\mathcal {S}}_{2}] \times [{\mathcal {I}}_{1}, {\mathcal {I}}_{2}]\) is the invariant rectangle of the vector field (2.3). Thus, we can choose \(M_1 = \min \{{\mathcal {S}}_1, {\mathcal {I}}_1\}\) and \(M_2 = \max \{{\mathcal {S}}_{2}, {\mathcal {I}}_{2}\}\), which completes the proof. \(\square \)
Now, we give the following definition. Firstly, we denote
Definition 2.1
(S, I) is the strong solution [or weak solution] of the differential inclusion (1.2), where S, \(I \in C([0, T]; H)\), and there exists \(\psi _{2}(S, I) \in L^1([0, T]; H), \psi _{2}(S, I) \in \varphi _{2}(S, I)\) almost everywhere in (0, T), and such that solution is a strong solution [or weak solution] over (0, T) to the system, which is given by
Obviously, we can obtain that the map \(\varphi _{1}(S, I)\) is bounded. By assumptions (H1), (H2) and (H3), with combining the above discussions, it is easy to know \(\varphi _{2}(S, I)\) is an upper semi-continuous bounded set-valued mapping with non-empty compact convex values.
Next, we denote
Let X be a real Banach space, \(U=(S,I)\) be the solution of system (1.1) with initial value \(U(0)=(S_0,I_0)>0\), and we defined \(\Psi :D(\Psi )\ni X\rightarrow X\) is the infinitesimal generator of a \(C_0\)-semigroup of linear contractions I(t). Furthermore, we defined \(\Psi :[0,T]\times X \rightarrow X\) be a function which measurable in t and Lipschitz continuous in X, uniformly with respect to \(t \in [0,T]\). Then we have the following conclusion:
-
(i)
If \(U_{0}\in X\), there exists a unique weak solution of system (2.9).
-
(ii)
If X is a Hilbert space, \(\Psi \) is a self-adjoint and dissipative on X with \(U(0)\in D(\Psi )\), and we can obtained
$$\begin{aligned} \begin{array}{lll} \displaystyle U\in W^{1,2}([0,T];X)\cap L^2([0,T];D(\Psi )), \end{array} \end{aligned}$$(2.10)which shows that the weak solution of system (2.9) is actually a strong solution.
Theorem 2.1
Suppose that assumptions (H1),(H2) and (H3) hold, then system (1.1) has at least one strong solution.
Proof
By the Theorem 2.4 in [28], there exists a strong solution (S, I) of system(1.1) with \(t\in [0,T_0]\), where \(0<T_0<+\infty \). Thus, for system (1.1), there exists a maximum existence interval \([0,T_{max}]\). According to [29], if the condition \(T_{max} <+\infty \), then
But by Lemma 2.1, where the invariant \(\Sigma \) is an \(L^{\infty }\) a priori bound for the solution (S, I) of the system (1.1), it is a contradiction which implies \(T_{max} =\infty \), i.e., so for all \((x, t) \in \Omega \times [0, +\infty )\), the solution of system (1.1) exists and bounded. Which completes the proof. \(\square \)
3 The existence of the equilibria
In this section, we are concerned about the existence of disease free equilibrium(DFE) and endemic equilibrium(EE) of the system (1.1). We using the analysis method in [17]. Firstly, when \(h(I)=0\), the DFE \(E_0(S_0^*,I_0^*)=(\frac{A}{\mu },0)\) always exists. Additionally, the EE \(E^*=(S^*,I^*)\) satisfies
Through a simple transformation, we define g(I) as follows
Lemma 3.1
The system (3.1) has a unique positive solution \({\bar{I}}\) satisfying \({\bar{I}}< \frac{A\beta -\mu \mu _1}{\mu _1(\beta +\mu m)}\) if \(A\beta >\mu \mu _1\) holds.
Proof
We are divided into the following three steps to prove.
-
Step 1.
We prove that system (3.1) exists a positive solution \({\bar{I}}\), when \(A \beta > \mu \mu _{1}\) holds, it means \(g(0)>0\), and we know the function g(I) is the monotonically decreasing of I and h(I) is non-decreasing of I. Obviously, \(g(I)\le 0\) if \(I\ge \frac{A\beta -\mu \mu _{1}}{\mu _{1}(\beta +\mu m)}\). Therefore, the set \(\left\{ I:g(I)\ge h(I^+), I>0 \right\} \) is bounded, then denote \({\bar{I}}=\sup \left\{ I:g(I)\ge h(I^+), I>0\right\} \). So, we can obtained that \(g({\bar{I}})\ge h({\bar{I}}^-)\) and \(0\le {\bar{I}}\le \frac{A\beta -\mu \mu _1}{\mu _{1}(\beta +\mu m)}\).
-
Step 2.
We prove \(g({\bar{I}})\in [h({\bar{I}}^-),h({\bar{I}}^+)]\). If not, \(g({\bar{I}})>h({\bar{I}}^+)=\lim _{I\rightarrow {\bar{I}}^+}h(I)\). Therefore, we can find a small constant number \(\epsilon \) such that \(g({\bar{I}}+\epsilon )>h({\bar{I}}+\epsilon )=h(({\bar{I}}+\epsilon )^+)\), which does not conform to the definition of \({\bar{I}}\). So, \(g({\bar{I}})\in [h({\bar{I}}^-),h({\bar{I}}^+)]\).
-
Step 3.
We prove that \({\bar{I}}\) is the unique positive solution of system (3.1). Let \(I_1={\bar{I}}\) is a solution of (3.1), and \(I_2\ne I_1\) is another positive solution of (3.1), then, there exists \(\gamma _1\in {\overline{co}}[h(I_1)]\) and \(\gamma _2\in {\overline{co}}[h(I_2)]\), so we have
$$\begin{aligned}&\displaystyle \frac{A\beta }{(\beta +\mu m)I_1+\mu }-\mu _1=\lambda \gamma _1,\nonumber \\&\frac{A\beta }{(\beta +\mu m)I_2+\mu }-\mu _1=\lambda \gamma _2. \end{aligned}$$(3.3)From the monotonicity of h(I), it implies that \(H=\frac{\gamma _1-\gamma _2}{I_1-I_2}\ge 0\). However, after subtraction of the two equations of (3.3), we obtain
$$\begin{aligned}&\displaystyle \gamma _1-\gamma _2=-\frac{A\beta (\beta +\mu m)}{\lambda [(\beta +\mu m)I_1+\mu ][(\beta +\mu m)I_2+\mu ]}\nonumber \\&\quad (I_1-I_2), \end{aligned}$$(3.4)
which is a contradiction. The proof of the lemma is completed. \(\square \)
A direct result of Lemma 3.1 is the following theorem of endemic equilibrium.
Theorem 3.1
Assume assumptions (H1-H3) hold and \(A \beta >\mu \mu _1+\mu \lambda \), then the system (1.1) has a unique endemic equilibrium \(E^*=(S^*,I^*)\), where \(I^*\)=\(\frac{A\beta -\mu (\mu _1+\lambda \gamma ^*)}{(\mu _1+\lambda \gamma ^*)(\beta +\mu m)}\) and \(S^*\)= \(\frac{A(1+mI^*)}{\beta I^*+\mu (1+mI^*)}\) with \(\gamma ^*\in {\overline{co}}[h(I)]\).
Remark 3.1
By differentiating the equilibrium density of infected individuals with respect to the saturation coefficient m, we get
when \(A \beta >\mu \mu _1+\mu \lambda \) holds, \(I^*\) is decreasing with the saturation coefficient m, it means when \(m \rightarrow +\infty \), the infective individuals may cannot persist.
4 Global stability of DFE and EE
In this section, we discussed the global stability of disease free equilibrium and endemic equilibrium in the invariant rectangle \(\Sigma \), respectively. Firstly, the global stability of DFE \(E_0\) is discussed as follows.
Theorem 4.1
Suppose that \(A\beta \le \mu \mu _1\), then DFE \(E_0=(S_0^*,I_0^*)\) of system (1.1) is globally asymptotically stable.
Proof
We define
Obviously, \(V_1(t)\) is a smooth function. Now, denote
From (H1) and (H2), it is easy to know that the map G is an upper semi-continuous set-valued map with non-empty compact convex value. For any \((w_1,w_2)\in G(S,I)\), there exist a function \(\gamma _{1}(t)\in {\overline{co}}[h(I)]\), we have
So from the above discussions, by calculating \(\nabla V(S,I)\cdot w\), we can obtain that
Owing to the homogeneous Neumann boundary condition, we obtain
Furthermore, when \(A\beta \le \mu \mu _1\), we have
Therefore, we can obtain that
Thus, the disease free equilibrium \(E_0\) is stable, and when \((S,I)=(\frac{A}{\mu },0)\), \(\frac{{\mathrm{d}}}{{\mathrm{d}}t}V_1(t)=0\). So the singleton \(E_0\) is the maximum compact invariant set in \(\Gamma =\{(S,I)|\frac{{\mathrm{d}}}{{\mathrm{d}}t}V_1(t)|=0\}\). By the Lasalle invariance principle [31], \(E_0\) is globally asymptotically stable for system (1.1). The proof is completed. \(\square \)
Theorem 4.2
Suppose that \(4A(1+mI^*)> \beta m M_2I^{*^{2}}\) and \(A \beta >\mu \mu _1+\mu \lambda \) hold, then EE \(E^*=(S^*,I^*)\) of system (1.1) is globally asymptotically stable.
Proof
We define
\(V_2(t)\) is a smooth function, based on assumptions (H1) and (H2), there exist a function \(\gamma _{2}\in {\overline{co}}[h(I)]\), we have
By calculating \(\nabla V(S,I)\cdot w\), we can obtain

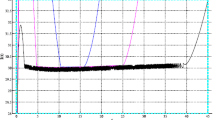
Dynamic behavior of system (1.1) for \(S(0,x)=I(0,x)=1, d_1=d_2=1, A=2, \beta =0.1, m=0.5, \mu =0.5, \mu _1=0.6, \lambda =0.2\)

Dynamic behavior of system (1.1) for \(S(0,x)=I(0,x)=1, d_1=d_2=1, A=3, \beta =0.5, m=0.5, \mu =0.5, \mu _1=0.6, \lambda =0.2\)
Owing to the homogeneous Neumann boundary condition, we can get
By the monotonicity of h(I), we have \(\lambda (I-I^*)(\gamma _{2}-\gamma _{*})\ge 0\). Therefore, if
holds, then \(F_{4}\le 0\). By a simple calculation, if \(4A(1+mI^*)> \beta m M_2I^{*^{2}}\), then we can get
As a result, combined with (4.11), we have
Thus, the endemic equilibrium \(E^*\) is stable, and when \((S,I)=(S^*,I^*)\), \(\frac{{\mathrm{d}}}{{\mathrm{d}}t}V_2(t)=0\). So the singleton \(E^*\) is the maximum compact invariant set in \(\Gamma =\{(S,I)|\frac{{\mathrm{d}}}{{\mathrm{d}}t}V_2(t)|=0\}\). By the Lasalle invariance principle [31], \(E^*\) is globally asymptotically stable for system (1.1). The proof is completed. \(\square \)
5 Numerical simulation
In this section, we show numerical simulations regarding our model to illustrate and support the theoretical results of the previous sections. We illustrate the DFE is globally asymptotically stable if the basic regeneration number \(R_0\) is less than unity in Fig.1 corresponding to \(S(0,x)=I(0,x)=1, d_1=d_2=1, A=2, \beta =0.1, m=0.5, \mu =0.5, \mu _1=0.6, \lambda =0.2\). Then we obtain \(R_0=0.667<1\), which implies that DFE \(E_0=(4,0)\) is globally asymptotically stable by Theorem 4.1 where disease will extinct. And for Fig.2, we show that the EE is globally asymptotically stable, for \( h(I)=\left\{ \begin{array}{lll} 0,&{}I(t)<1\\ 0.8,&{}I(t)\ge 1 \end{array} \right. \), let \(S(0,x)=I(0,x)=1, d_1=d_2=1, A=3, \beta =0.5, m=0.5, \mu =0.5, \mu _1=0.6, \lambda =0.2\). Then we obtain \(A\beta >\mu \mu _1+\mu \lambda \), which implies the EE is globally asymptotically stable by Theorem 4.2 where disease spread in the human world.
6 Conclusion
In this paper, we investigate the dynamic of a diffusive SIR epidemic model under discontinuous treatments. Due to the discontinuous term, the existence of strong solution or weak solution of system(1.1) is proved under the framework of differential inclusion. Based on the differential inclusions theory, we analysis the existence of endemic equilibrium of the system (1.1). Moreover, by constructing different suitable Lyapunov functions, we investigate the global asymptotic stability of the disease free equilibrium(DFE) and the endemic equilibrium(EE), respectively.
Compared to literature [17], a different incidence rate \(g(I)=\frac{\beta I}{1+mI}\) is considered in the system (1.1). When saturated incidence rate \(m=0\), the nonlinear saturated incidence rate become the linear incidence rate, which is corresponding to the system in [17]. When saturated incidence rate \(m\rightarrow +\infty \), we conclude that the infective individuals cannot persist in Remark 3.1. This result seems to be consistent with realistic intuition : the more behavioral changes of susceptible individuals or the inhibition of crowding effect of infected individuals, the better disease control. When saturated incidence rate \(0<m<+\infty \), from Theorem 4.2, it is shown that saturated incidence rate m may affect the global stability of the endemic equilibrium. Furthermore, if linear incidence rate is considered and the discontinuous treatments term does not exist in the system(1.1), that is \(m=0\) and \(\lambda =0\), then from Theorem 4.1 and Theorem 4.2 we can easily define the basic reproduction number \(R_0=\frac{A\beta }{\mu \mu _1}\). When \(R_0<1\), the DFE is globally asymptotically stable, and when \(R_0>1\), the EE is globally asymptotically stable. However, in the system (1.1), due to nonlinear incidence rate and the discontinuous term, it follows from Fig.1, we can obtain that when \(R_0<1\), the DFE is also globally asymptotically stable, and when \(R_0>1+\frac{\lambda }{\mu _1}\), it follows from Fig.2, the EE is also globally asymptotically stable. But, when \(1< R_0<1+\frac{\lambda }{\mu _1}\), whether the endemic equilibrium is globally asymptotically stable is still unknown, which will be considered in our future work.
References
Mishra AM, Purohit SD, Owolabi KM (2020) A nonlinear epidemiological model considering asymptotic and quarantine classes for SARS CoV-2 virus. Chaos Solitons and Fractals 138:109953
Saha S, Samanta GP (2021) Modelling the role of optimal social distancing on disease prevalence of COVID-19 epidemic. Int J Dynam Control 9:1053–1077
Ssematimba A, Nakakawa JN, Ssebuliba J et al (2021) Mathematical model for COVID-19 management in crowded settlements and high-activity areas. Int J Dynam Control 9:1358–1369
Beretta E, Hara T, Ma W (2001) Global asymptotic stability of an SIR epidemic model with distributed time delay. Nonlinear Anal Theor 47(6):4107–4115
Capone F, Cataldis VD, Luca RD (2013) On the nonlinear stability of an epidemic SEIR reaction-diffusion model. Ric di Mat 62(1):161–181
Yang J, Wang X (2019) Dynamics and asymptotical profiles of an age-structured viral infection model with spatial diffusion. Appl Math Comput 360:236–254
Guin LN, Pal S, Chakravarty S et al (2021) Pattern dynamics of a reaction-diffusion predator-prey system with both refuge and harvesting. Int J Biomath 14(01):2050084
Guin LN, Acharya S (2017) Dynamic behaviour of a reaction-diffusion predator-prey model with both refuge and harvesting. Nonlinear Dyn 88(2):1501–1533
Guin LN, Mondal B, Chakravarty S (2017) Stationary patterns induced by self-and cross-diffusion in a Beddington-DeAngelis predator-prey model. Int J Dynam Control 5(4):1051–1062
Han R, Guin LN, Dai B (2021) Consequences of refuge and diffusion in a spatiotemporal predator-prey model. Nonlinear Anal Real 60:103311
Haque M (2012) Existence of complex patterns in the Beddington-DeAngelis predator-prey model. Math Biosci 239(2):179–190
Mohan N (2021) Coexistence states of a Lotka Volterra cooperative system with cross diffusion. Partial Diff Equ Appl Math 4:100072
Guo Z, Zou X (2015) Impact of discontinuous harvesting on fishery dynamics in a stock-effort fishing model. Commun Nonlinear Sci Numer Simul 20(2):594–603
Li W, Ji J, Huang L (2020) Dynamics of a discontinuous computer worm system. P Am Math Soc 148(10):4389–4403
Guo Z, Huang L, Zou X (2013) Impact of discontinuous treatments on disease dynamics in an SIR epidemic model. Math Biosci Eng 9(1):97–110
Zhang X, Zhao H (2020) Global stability of a diffusive predator-prey model with discontinuous harvesting policy. Appl Math Lett 109:106539
Li W, Ji J, Huang L (2021) Global dynamics of a controlled discontinuous diffusive SIR epidemic system. Appl Math Lett 121(1):107420
Chakraborty K, Chakraborty M, Kar KT (2011) Optimal control of harvest and bifurcation of a prey-predator model with stage structure. Appl Math Comput 217(21):8778–8792
Xie Y, Wang Z, Meng B (2020) Dynamical analysis for a fractional-order prey-predator model with Holling III type functional response and discontinuous harvest. Appl Math Lett 106:106342
Ni WM, Tang M (2005) Turing patterns in the Lengyel-Epstein system for the CIMA reaction. T Am Math Soc 357(10):3953–3969
Capasso V, Serio G (1978) A generalization of the Kermack-McKendrick deterministic epidemic model. Math Biosci 42(1):43–61
Sun X, Cui R (2020) Analysis on a diffusive SIS epidemic model with saturated incidence rate and linear source in a heterogeneous environment. J Math Anal Appl 490(1):12422
Liu C, Cui R (2021) Qualitative analysis on an SIRS reaction diffusion epidemic model with saturation infection mechanism. Nonlinear Anal Real 62:103364
Wang Y, Wang Z, Lei C (2019) Asymptotic profile of endemic equilibrium to a diffusive epidemic model with saturated incidence rate. Math Biosci Eng 16(5):3885–3913
Du Z, Rui P (2016) A priori \(L^{\infty }\) estimates for solutions of a class of reaction-diffusion systems. J Math Biol 72(6):1429–1439
Liu S, Chen Y (2017) A new two-grid method for expanded mixed finite element solution of nonlinear reaction diffusion equations. Adv Appl Math Mech 9(03):757–774
Weinberger FH (1975) Invariant sets for weakly coupled parabolic and elliptic systems. Rend Math Ser VI
Simsen J, Gentile BC (2009) On p Laplacian differential inclusions-Global existence, compactness properties and asymptotic behavior. Nonlinear Anal Theor 71(7):3488–3500
Hollis SL, Martin RH, Pierre J (1987) Global existence and boundedness in reaction-diffusion systems. SIAM J Math An 18(3):744–761
Bacciotti A, Ceragioli F (1999) Stability and stabilization of discontinuous systems and nonsmooth Lyapunov functions. Esaim Contr Optim Ca 4(4):361–376
Lasalle PJ (1968) Stability theory for ordinary differential equations. J Diff Eq 4(1):57–65
Acknowledgements
This work is supported by the Natural Science Foundation of China (11672074), and the Natural Science Foundation of Fujian Province (2018J01655).
Funding
The research was supported by the Natural Science Foundation of China (11672074), and the Natural Science Foundation of Fujian Province (2018J01655).
Author information
Authors and Affiliations
Contributions
All authors contributed equally to the writing of this paper. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Conflicts of interest
The authors declare that there is no conflict of interests.
Rights and permissions
About this article

Cite this article
Cao, Q., Liu, Y. & Yang, W. Global dynamics of a diffusive SIR epidemic model with saturated incidence rate and discontinuous treatments. Int. J. Dynam. Control 10, 1770–1777 (2022). https://doi.org/10.1007/s40435-022-00935-3
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40435-022-00935-3