
Abstract
Robustness is defined as the insensitivity of the structure to uncertainties like earthquakes, fire, cyclones, explosions, tsunamis, etc. Robustness analysis of Kalman observer with robust controller for damped outrigger structure is studied to analyze its design performance in the presence of various effects like an earthquake. This is a novel innovative study undertaken in evaluating the robustness of the proposed controller to signify its performance in the field of structural control. The damped outrigger structure is modeled using the finite element approach by finding mode shapes, fundamental natural frequency, and period. The Kalman observer is modeled according to the requirement of the structure with the Riccati equation. The robust proportional–integral–derivative controller is designed according to the input disturbance with Ziegler–Nichols ultimate gain approach. The issue of deterioration in the system performance due to saturation was observed during the analytical investigation of the robust proportional–integral–derivative controller with Kalman observer, which has been addressed by the anti-windup approach. The robustness index of the structure is calculated using sensitivity and complementary sensitivity. The maximum amplitude ratio of the sensitivity for viscous damper-controlled structure is 1.4723 and the value decreases for the other controllers, with a minimum value of 1.0 for the proposed anti-windup robust proportional–integral–derivative controller with Kalman observer. Respectively, the percentage overshoot for the uncontrolled case is 23.4% that values decreasing for other controlled cases, with a minimum of 7.8% for proposed anti-windup robust proportional–integral–derivative controller with Kalman observer. This robustness index and performance indices discriminate the significant robust performance of the proposed robust proportional–integral–derivative controller with Kalman observer-based damped outrigger structure in comparison with other controlled and uncontrolled cases.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
In the construction sector, the structural system is exposed to vibration throughout its lifetime. These structures will be considerably deformed because of the increase in the amplitude of the periodically applied force. Due to the frequency of the applied forces becoming nearer to the structural natural frequency, this is the condition of resonance. This continuous deformation will cause discomfort and acute nausea in the occupants. Structural control approach has been introduced to address this issue of vibration in the system by reducing its effect [1]. In structural control, the response of the structure needs to be mitigated for lateral loads within the permissible limits for serviceability criteria [2]. Therefore, it is a challenge for a structural engineer to design a structure that resists lateral loads using control strategies. In structural control, the lateral loads were resisted by adding the extra strength to the structure. This was usually obtained by constructing larger sections [3], so stiffer and more massive buildings. However, it is obvious that with this method inertial mass becomes greater which will not solve some of the problems like higher security level demand, higher performance requests [4], etc. Therefore, structural control can offer the solution for both points of view of security and comfort. Structural control is a very huge field, and it is difficult to deal with all the techniques [5]. To reduce the force of lateral loads, in the structural design, the vibrations in the structure need to be reduced by introducing a vibration control system. If the structure does not use the supplementary damping device to control the structural vibration, then the stiffness of the structure needs to be increased to control deflection, which is uneconomical. Thus, to control the structure from the external loads, a structural protective system should be installed in the structure to reduce the drift so that the occupant’s safety will be ensured [6]. The vibration control system fitted in the structure has many components in it, such as sensors, dampers, actuators, mechanical devices, control devices, and mechanical connecting appliances. These components are of many types developed over the years to improve the control technique in structural vibration control systems. Therefore, it is significant to use protective systems for earthquake excitation at best in seismically prone regions for safeguarding the structures and the lives [7]. This demands a stronger tall structure within its geometry to reduce the vibration of the structure, therefore outrigger is preferable because it is easier to build, with associated cost-saving and can provide massive lateral stiffness. The performance of an outrigger structure will be increased without changing its architectural view, which is a significant advantage over other lateral load-resisting systems [8]. Adding an outrigger alone to the structure can reduce the vibration response. An outrigger is a deep, stiff beam that connects the core to the perimeter column and it has proven to be a lateral load-resisting structure in earlier studies as it stiffens and strengthens the structure [9]. The outrigger structure concept is compared to a skier who holds the ski poles using his arms and shoulders to get additional stability. By adding the supplementary device in between, the core and outrigger there will be little increase in the stiffness of the structure but a drastic increase in the damping of the structure is witnessed because in tall building the resonant wind load is considered to be more significant than the static wind [10]. The addition of a supplementary device reduces the acceleration of the structure; the dynamic wind load response of the structure is reduced dramatically and design wind forces are reduced. There are various concepts in structural control, but the principle remains the same of connecting or adding the control devices primarily to increase damping than stiffness.
Protective systems are classified as active protective systems, passive protective systems, semi-active protective systems and hybrid protective systems. Passive control systems provide a simple and direct approach to control the earthquake forces through the structures [11], 12. In this system, devices are designed specially to dissipate the dynamic earthquake load without using any external or additional energy sources [13], 14. The active protective system includes the devices such as controllers, actuators and sensors [15]. In this system, an external power supply is needed for the operational purpose and needs to be active during the dynamic wind and earthquake load [16], 17. A small amount of external energy or power source is used by the semi-active control system for its operation and consumes a moment of the structure to produce the control force, where the control force can be manipulated by an external power source. To overcome these limitations the hybrid control system is introduced which is a combined system. The hybrid control system adopts the robustness of the passive system and also adopts the high performance of the active system [18]. The combination of a protective system with a lateral load-resisting element will provide collectively improved efficiency. A hybrid mass damper control system is introduced in controlling the structure using robust model predictive control. The authors state that the proposed system mitigates the structural response better than the benchmark controllers proposed earlier [19]. The active tuned mass dampers are facilitated with the robust and adaptive control system by the authors in [20, 21] to improve the performance of the control system in maximizing the structural response control. Other than these control techniques, research has been taking place in controlling the structure by applying the changes in the shape of the system, different structural forms and structural types.
In this study, the outrigger structure facilitated with the dampers is considered in controlling its response to external disturbances like earthquakes. When semi-active systems like MR dampers are integrated along with an outrigger structure, the performance will be enhanced due to the better control algorithm [22]. The uncertainty or the disturbances like earthquakes or sensor failure caused within the integrated system will not be addressed by the conventional control system, and therefore, robust control algorithms need to be introduced to the system [23, 24]. Therefore, the design of the better performing robust controller to reduce the dynamic response of tall structures during an earthquake is very much essential. This has motivated the present research work to choose an outrigger structure, which is lateral load resistant, and whose response could be mitigated by using a robust control algorithm with a Kalman observer. The results obtained using a robust controller with an observer-based design for an optimized damped outrigger structure have proved its reliability and robustness by mitigating structural response. The robustness index is calculated to compare the efficiency of the proposed controllers, and it has given a significant outcome in terms of robustness as presented in the result section.
2 Methodology
In this study, a 60-story outrigger structure with a floor height of 3.5 m, a base dimension of 20 m and a core dimension of 12 m is considered for structural dynamic simulation. In this structure, eight outriggers are present, two in each direction. There are four columns in each direction, constituting a total of twelve columns in this structure as shown in Fig. 1.

Plan and Elevation of 60-story outrigger structure [25]
Some assumptions in the study are that the core of the structure is considered a cantilever and stiffness is considered to be uniform. The connection between the core and outrigger is considered rigid, and thus, both rotate in same the amount. The columns are considered to have pinned connections to the ground. MATLAB and Simulink are the software used in modeling the outrigger structure with the dampers and passive/semi-active controller. In this study, the El-Centro and Kobe earthquakes are considered as uncertainty to the structure. The modeling of the structure is elaborately explained in [25] with the known material properties, sectional properties, and values pertaining to it. The geometrical/material properties like modulus of elasticity of concrete, the density of concrete, base length of a building, thickness of the core/floor, floor height, moment of inertia, and area of the core are briefed in [25]. The mass of the 60-story structure is calculated with known material properties and geometry of the structure with matrix dimension as 120 × 120 (one floor is considered as one node with two degrees of freedom as translational and rotational degrees of freedom). The core of the outrigger structure is modeled as beam element and outriggers are modeled as bar elements. A beam is considered to be a slender member of a structure that helps in resisting lateral forces and resist bending. The shape function of the one-dimensional beam element considers vertical force and bending moment at each node and assumes to have no horizontal forces or axial forces. In modeling the stiffness matrix, the core is considered to have a beam element with vertical displacement and bending moment that rotates at each node [26]. Since forces and moments at each node are connected to the displacement and rotation, the stiffness matrix for each element is of a 4 × 4 matrix, relating respective force to displacement and moment to the rotation of the beam element. The final global stiffness matrix is calculated with the matrix dimension as 120 × 120. The damping ratio is assumed to be 2% for each mode. The frequency of the structure to calculate the Rayleigh damping coefficients considered here is the first two orders as reference frequencies. The overall damping matrix calculated is of dimension 120 × 120 by using the Rayleigh damping method. The overall damping is calculated by known mass, stiffness, damping ratio, and frequency of the structure [27]. The detailed methodology followed in this research is presented in the form of a flowchart that explains the process of developing the uncontrolled/controlled outrigger structure as shown in Fig. 2.

Flowchart of detailed methodology
3 Uncontrolled structure
The damped outrigger structure is briefed with material properties and physical parameters are calculated according to the system dynamics. The conversion of the differential equation from the equation of motion to state-space form in the presence of the earthquake excitation and the damper forces is explained in the articles. An uncontrolled condition is when there is no control force acting on the structure in the presence of an external disturbance such as an earthquake. The uncontrolled condition of the damped outrigger is simulated in MATLAB and Simulink to observe the response of the structure. The displacement and acceleration of each floor of the outrigger structure have been recorded and presented to compare the effectiveness with the controlled case [28].
4 Magneto-rheological damper
The semi-active damper that has proved itself promising in controlling the vibration of structure is the MR damper as elaborated. This mechanical device is simple in its application, with a wide range of dynamic properties. Its power consumption is low and has a huge force output capacity. The fluid inside the MR damper has magnetic properties, and it makes the damper promising in controlling the vibration by dissipating the force required by the system. This damper works in a wide range of temperatures of 400 °C to 15,000 °C, with constant hysteresis behavior, huge yielding strength, and small viscosity. The capacity of the MR damper considered in this study is of 3000 kN [29].
5 Proportional–integral–derivative controller
The proportional–integral–derivative (PID) controller is the simplest and most basic controller in the industry that sensors a signal to computing actuator output. This actuator output is calculated based on the proportional, integral, and derivative responses, by adding all of these responses to get desired output. Zeigler–Nichols’s ultimate gain method is used in tuning the PID controller. Equation (1) shows the PID controller formula.
In Eq. (1), \(\mathrm{\hat{e} }\left(t\right)\) is the error calculated, \(\underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}}{u} \left( t \right)\) is the output of the controller as voltage, \({K}_{\mathrm{p}}\) is the proportion constant, \({T}_{\mathrm{i}}\) is integral time and \({T}_{\mathrm{d}}\) is derivative time. This PID controller collaborates with the MR damper and outrigger structure to reduce its response.
6 Robust PID controller with Kalman observer designed for damped outrigger structure
The observer is defined as a soft sensor, which estimates the state of the system; if it knows the system model, system output, and input. A continuous-time system is said to be observable if the initial state \({{\rlap{--} {\text{x}} }}\left( 0 \right)\) is determined uniquely with the knowledge of input and output measurements for any initial state \({{\rlap{--} {\text{x}} }}\left( 0 \right){ }\) and for time \(t>0\). In any system, if it is observable with the knowledge of initial state, all the states can be determined [30]. For a system to be observable some assumptions made are listed below,
-
Observer to estimate the state \({{\rlap{--} {\text{x}} }} \left( t \right)\), the system input and system output are assumed to be measurable exactly.
-
The same state-space modeling of the system that is matrix \(A, B, C, D\) of the system is used for the observer, where state space model of the system is assumed to be known exactly.
-
The observer is considered a deterministic system with nth order linear dynamic equation.
-
The measurement noise and disturbances acting on the system are considered in the study.
Based on these assumptions full-order Kalman observer is designed as it uses the same system matrices for estimating the states.
The full-order Kalman observer is a sub-system designed in this work to reconstruct all the state variables of the damped outrigger system. As a first step of the design, the observability of the system is checked. Where observability of a linear time-invariant system is explained below.
The outrigger system is said to be completely observable if every state \({{\rlap{--} {\text{x}} }}\left( {t_{o} } \right)\) can be determined from the observation of \(\underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\cdot}$}}{\text{y}}\left( t \right)\) over a finite time interval \({t}_{\mathrm{o}}\le t \le {t}_{\mathrm{f}}\) (Where \({t}_{\mathrm{o}}\) and \({t}_{\mathrm{f}}\) are initial time and final time). Then, any system is considered to be completely observable, if every transition of the system state ultimately will affect all the elements of the output vector. Observability is a very significant concept because in practical conditions it is very difficult to deal with state feedback control, as some of the system states are not available for direct measurements. This makes it necessary to estimate the unavailable system states to produce the control signal. In this work to check the observability Kalman’s test is used that is as shown below. The observability matrix \({U}_{\mathrm{O}}\) has been formed, with the knowledge of system matrix \(A\) with dimensions \(240\times 240\) and output matrix \(C\) with dimensions 120 × 240,
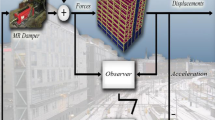
Then, the rank of \({U}_{\mathrm{O}}\) has been checked. \({U}_{\mathrm{O}}\) is found to be of rank 240. Hence, it is concluded that the system considered is completely observable. Figure 3 shows a block diagram of the observer-based outrigger system used in the present research work.

(Source: Created by author)
Observer-based outrigger system
The uncertainty is due to the inadequate placement of the sensors or sensor signal failure or noise-corrupted output. Also, earthquake is considered to be one of the major uncertainties in this work. So, there is a need for designing a modified control algorithm that takes care of these uncertainties without hindering the system’s stability or system performance [31]. Therefore, a robust PID controller is designed will be robust to the uncertainties like earthquakes and sensor failures. The governing equations of robust PID controller are adopted from the literature and which is given in (3)–(8),
Here \({{\rlap{--} {\text{x}}}}\left( t \right)\) is the state vector, \(u\left(t\right)\) is the output of the controller, \({K}_{\mathrm{r}}\) is feedback controller gain of robust PID controller, \(w\) and \({v}_{0}\) are process noise and measurement noise and \(\underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\cdot}$}}{\text{y}}\left( t \right)\) is the output of the structure [32].
The simulation of the integrated system had degradation in the performance and deterioration in the output of the system. The problem of windup began in the industries where the practitioners found the performance degradation in the system by extended settling time, extreme over-shoot, etc. The control system has limitations, and these limitations will affect the closed-loop system behavior. This situation is referred to as wind-up that deteriorates the performance of the system due to saturation that occurs at plant input or in the feedback control loop [33]. Every actuator has limitations of its own, for example, a piezoelectric actuator cannot cross-limitless distance, a motor cannot produce limitless force, a rudder cannot bounce at limitless angles and an amplifier cannot deliver limitless voltage. In this work, when the damped outrigger system is integrated with an MR damper and robust PID controller, the issue of delayed response time with the extremely huge value of response was obtained [34]. This issue in the integrated closed loop system necessitated finding the reason and solution to overcome this problem. The literature survey provided a reason for the degraded behavior of the system which was because of windup. The reason for the windup was because of the saturation in the actuator which would sluggish the feedback response of the system to a intensively high level. The occurrence of the windup is due to certain set of input limitation and some set point variation. To handle the problem of wind-up, the term anti-windup has been introduced. A saturation block is used in case of anti-windup that imposes upper and lower limits on the signal which is placed between the plant and the controller [35].
7 Robustness criteria
The robustness of a closed-loop system refers to its ability to be insensitive to uncertainties. The robustness also refers to the capacity of the closed-loop control to overcome the variation in the parameter of the plant transfer function that maintains the stability and performance goals. As mentioned in the literature to evaluate the performance of the controller along with the system, there are two criteria called sensitivity and complementary sensitivity [36]. Sensitivity is defined as the effect of change in one transfer function on another transfer function. The transfer function representation of sensitivity and complementary sensitivity is given in (9) and (10)
where \({G}_{\mathrm{c}}\)—Transfer function of the controller, \({G}_{\mathrm{p}}\)—Transfer function of plant.
In this section, the maximum sensitivity and maximum complementary sensitivity for the MR damper-based outrigger structure along with different designed controllers are calculated. The maximum amplitude ratio of sensitivity (\({M}_{\mathrm{s}}\)) and maximum value of complementary sensitivity (\({M}_{\mathrm{c}}\)) will provide the measure of robustness and provide evaluation criteria for different controllers along with the system in a closed loop. The maximum sensitivity \({M}_{\mathrm{s}}\) is the inverse of the shortest distance from the Nyquist plot to the critical point − 1. The maximum amplitude ratio of complementary sensitivity \({M}_{\mathrm{c}}\) is referred to the as resonant peak. As per the articles [37] if \({M}_{\mathrm{s}}\) and \({M}_{\mathrm{c}}\) both decrease the robustness of the closed-loop system increases. In the control system, the value of \({M}_{\mathrm{s}}\) should be in the range of 1.0–2.0 and \({M}_{\mathrm{c}}\) should be in the range of 1.0–1.5.
8 Results and discussion
In this research work undertaken semi-active dampers are used to reduce the response of the structure. The uncontrolled response of the outrigger is plotted for the excitement of different earthquakes like the El-Centro earthquake and the Kobe earthquake. The MR damper effectiveness is also studied when used as a passive and semi-active damper in damped outrigger structural control. The control force commanded by the MR damper in reducing the structural vibration is evident in this study. Kalman observer is designed to estimate the states of the system and it is fine-tuned until it mimics the true states of the system. The robust PID controller is designed with an anti-windup technique along with the observer to mitigate the structural response.
The preliminary structural analysis of the outrigger structure is conducted to get the mode shape of the structure and translational and rotational mode shape of the structure is obtained as shown in Figs. 4 and 5. Table 1 gives the fundamental natural period, modal mass, and modal participation factor of the outrigger structure.

First, second, and third translational mode shapes of the outrigger structure

First, second, and third rotational mode shapes of the outrigger structure
The mode shape deflection is associated with a particular modal frequency and the deflection pattern for the first mode is plotted in Fig. 6. The fundamental natural frequency for the first, second, and third modes of the structure is tabulated in Table 2 for different locations considered from the mid-height to the top of the structure symmetrically every sixth floor to simplify the analysis. In Table 2, for the first three modes, comparable larger values of fundamental natural frequency are observed when the outrigger is placed on the 48th floor. As the fundamental natural frequency is directly proportional to stiffness and stiffness is inversely proportional to the deflection, it can be inferred that placement of the outrigger on the 48th floor is the preferable optimum location. By observing the first mode shapes, the outrigger on the 48th floor can provide smaller mode shape deflection hence smaller top displacement as shown in Figs. 6 and 7. Even though the deflection due to outrigger placement at the 54th and 60th floor is comparable with the 48th floor, numerical value of deflection is least at 48th floor. Hence, the outrigger on the 48th floor is proposed as the optimum location, which is also at 0.8 the height of the structure from the base. Based on the specific objective of the research the optimum location of the outrigger may vary, while in this study, the objective is to mitigate the response of the outrigger structure in terms of displacement and acceleration. The results infer the same when the fundamental natural frequency, mode shape, and displacement of mentioned floors are tabulated and plotted which are shown in Table 2, Figs. 6, and 7.

a Mode shape deflection of the structure with outrigger located at different floors b Zoomed mode shape deflection at the top of the structure with outrigger located at different floors

Displacement of the structure with outrigger at different locations
Figure 8 depicts the displacement of the top floor of the damped outrigger structure for El-Centro earthquake for different cases such as uncontrolled, MR damper in passive mode (DC voltage of 5 V is fed to damper), MR damper with PID controller and MR damper with observer-based anti-windup robust PID controller. Also, the displacement profile of all the cases when merged together for the El-Centro earthquake is shown in Fig. 8.

Merged displacement profile of the top story for the El-Centro earthquake
The displacement profile of all the cases when merged together for the Kobe earthquake is shown in Fig. 9.

Merged displacement profile of the top for the Kobe earthquake
The acceleration profile of all the cases when merged together for the El-Centro earthquake is shown in Fig. 10.

Merged acceleration profile of the top story for the El-Centro earthquake
The acceleration profile of all the cases when merged together for the Kobe earthquake is shown in Fig. 11.

Merged acceleration profile of the top story for the Kobe earthquake
As a part of verification of this research, the graphs have been plotted for the uncontrolled response of the structure and the viscous damper control of the structure that are verified from the literature and are cited [38].
The response of the optimum damped outrigger structure, that is, displacement profile of the structure of the top floor (60th floor) excited for El-Centro earthquake load is shown in Fig. 12a Displacement profile of present research work and Fig. 12b Displacement profile from the existing literature [38]. Acceleration of the optimum damped outrigger structure of the top floor (60th floor) is shown in Fig. 13a Acceleration profile of present research work and Fig. 13b Acceleration profile from the existing literature [38].

Displacement of the top floor a present study, b reference article [38]

Acceleration of top floor a present study, b reference article [38]
Table 3 shows performance indices of different control algorithms in terms of percentage overshoot, settling time, Integral Error (IE), Integral Absolute Error (IAE), Integral Square Error (ISE), Integral Time Absolute Error (ITAE), and Integral Time square Error (ITSE).
From Table 3, it is observed that the percentage overshoot and the settling time decrease for all the controlled cases in comparison with the uncontrolled case. Among controlled cases, the proposed observer-based anti-windup robust PID controller has lower values in comparison with all the other controllers. The five errors, that are IE, IAE, ISE, ITAE, and ITSE, are calculated for the PID controller and robust PID controller. Table 3 shows that in all the five errors calculated there are extensively lesser values for the robust PID controller than the PID controller signifying the better performance in mitigating the structural response. The controller designed for the damped outrigger structure has shown significant robustness as observed by the calculated values of evaluation criteria and performance indices.
To evaluate the robustness of the closed loop system with the designed controller, the sensitivity and complementary sensitivity of the integrated system are calculated using the system and controller transfer function. The further maximum amplitude ratio of sensitivity (\({M}_{\mathrm{s}}\)) and maximum amplitude ratio of complementary sensitivity (\({M}_{\mathrm{c}}\)) are computed. Tables 4 and 5 show the value of the maximum amplitude ratio of sensitivity and complementary sensitivity for different cases such as viscous controller, MR damper in passive mode, MR damper with PID controller, and MR damper with observer-based anti-windup robust PID controller, respectively.
The satisfactory results are obtained as shown in Tables 4 and 5, where \({M}_{\mathrm{s}}\) and \({M}_{\mathrm{c}}\) are highest for the viscous damper case signifying that it is least robust for the uncertainties considered which are El-Centro earthquake and Kobe earthquake or sensor failures. Similarly, for the MR-observer-based anti-windup robust PID controller case \({M}_{\mathrm{s}}\) and \({M}_{\mathrm{c}}\) are least compared to other cases proving that it is having the highest robustness compared to the viscous damper, MR damper, and MR damper with PID Controller.
9 Conclusions
The dynamically simulation of damped outrigger structure is undertaken to reduce the vibration in the structure due to earthquakes. This research work has demonstrated the utility of robust controllers in enhancing performance of the tall structures by aggressive vibration control under dynamic loading. The optimum location of the outrigger is found by obtaining the minimum displacement at the top story of the structure, and the optimum location is found at 0.8H (where H is the total height of the building) from the bottom of the structure. The results obtained using an observer-based robust PID controller designed for an optimized damped outrigger structure have proved its reliability and robustness by mitigating structural response to a minimum as compared to other methods used in this research work. The issue of deterioration in the system performance due to saturation was observed during the analytical investigation of an observer-based robust PID controller, which has been addressed by the anti-windup approach. The performance evaluation and robustness index has been proposed, which discriminates the significant robust performance of the proposed observer-based anti-windup robust PID controller in comparison with controlled and uncontrolled cases. The robust controller design shows a better performance in case of percentage overshoot, settling time, and performance indices values as observed in the result section. The proposed robust controller integrated with a damped outrigger structure with an MR damper emphasizes great utility potential in the performance enhancement of ultra-high-rise buildings. The study undertaken is a simulation-based work, to understand its practical reality a prototype structure with a robust controller has to be developed to get a validated result. For different conditions of parametric uncertainty or input uncertainty, the study can be undertaken, which can provide a significant research outcome. It shall open up new possibilities in vibration control as the structural control system is upcoming technology and is a new innovative area in research, which has a huge potential in the construction industry.
10 Scope for future work
The concept of anti-windup with the proposed controller for ultra-high-rise buildings can be extended to include variable stiffness damper, shape memory alloy, etc., for real-time hybrid damper. The damped outrigger structural system can also be studied for the stochastic optimal control, where the randomness can be considered in structural dynamic properties.
References
Chopra AK (2001) Dynamics of structures theory and applications to earthquake engineering. Prentice-Hall
Jafari M, Alipour A (2021) Methodologies to mitigate wind-induced vibration of tall buildings: a state-of-the-art review. J Build Eng 33:101582. https://doi.org/10.1016/j.jobe.2020.101582
Taranath BS (2012) Structural analysis and design of tall buildings. CRC Press
Taranath BS (2010) Reinforced concrete design of tall buildings. Taylor & Francis Group
Saaed TE, Nikolakopoulos G (2015) A state-of-the-art review of structural control systems. J Vib Control 21(5):919–937
Spence SMJ, Kareem A (2014) Tall buildings and damping: a concept-based data-driven model. J Struct Eng 140(5):04014005. https://doi.org/10.1061/(asce)st.1943-541x.0000890
Fleck L, Miguel F, Letícia SPO (2017) Robust simultaneous optimization of friction damper for the passive vibration control in a colombian building. Procedia Eng 199:1743–1748
Fang C, Spencer BF, Xu J, Tan P, Zhou F (2019) Optimization of damped outrigger systems subject to stochastic excitation. Eng Struct 191:280–291. https://doi.org/10.1016/j.engstruct.2019.04.011
Ho GWM (2016) The evolution of outrigger system in tall buildings. Int J High Rise Build 5(1):21–30
Al-Subaihawi QS, Kolay C, Marullo T, Ricles JM (2020) Assessment of wind induced vibration mitigation in a tall building with damped outriggers using real-time hybrid simulations. Eng Struct 205:110044. https://doi.org/10.1016/j.engstruct.2019.110044
Takewaki I, Fujita K, Yamamoto K, Takabatake H (2011) Smart passive damper control for greater building earthquake resilience in sustainable cities. Sustain Cities Soc 1(1):3–15
Aydin E, Ozturk B, Dutkiewicz M (2019) Analysis of the efficiency of passive dampers in multi-storey buildings. J Sound Vib 439:17–28
Jaisee S, Yue F, Ooi YH (2021) A state-of-the-art review on passive friction dampers and their applications. Eng Struct 235:112022
Elias S, Matsagar V (2017) Annual reviews in control research developments in vibration control of structures using passive tuned mass dampers. Annu Rev Control 44:129–156. https://doi.org/10.1016/j.arcontrol.2017.09.015
Datta TK, Khas H (2003) A state-of-the-art review on active control of structures. ISET J Earthq Technol 40:1–17
Mahdi A, Siamak T, Agathoklis G (2021) Active vibration control of seismically excited building structures by upgraded grey wolf optimizer. IEEE Access 9:166658–166673
Pnevmatikos N, Gantes C (2009) Design and control algorithm for structures equipped with active variable stiffness devices. Struct Control Health Monit 17(6):591–708
Demetriou D, Nikitas N (2017) Hybrid semi-active mass dampers in structures; assessing and optimising their damping capacity. Procedia Eng 199:3103–3108
Lefteris K, Nikolaos N, Petros A (2022) Robust structural control of a real high-rise tower equipped with a hybrid mass damper. Struct Design Tall Spec Build 31:e1941
Saman S, Fereshteh E, Mohsen K, Hussein E (2023) Sliding sector–based adaptive controller for seismic control of structures equipped with active tuned mass damper. Structures 51:1507–1524
Abbas-Ali Z, Sadegh E (2023) Robust output feedback-based neuro-fuzzy controller for seismically excited tall buildings with ATMD accounting for variations in the type of supporting soil. Soil Dyn Earthq Eng 1645:107614
Chang CM, Wang Z, Spencer BF, Chen Z (2013) Semi-active damped outriggers for seismic protection of high-rise buildings. Smart Struct Syst 11:435–451. https://doi.org/10.12989/sss.2013.11.5.435
Amalia M, Georgios S, Anastasios P, Markos P, Nectarios V (2023) Robust control and active vibration suppression in dynamics of smart systems. Inventions 8:47
Diego G, Georgios T, Ioannis S, Franck P (2023) Earthquake control: an emerging application for robust control. Theory and experimental tests. IEEE Trans Control Syst Technol 31:1747–1761
Kavyashree BG, Patil S, Rao VS (2022) Damped outrigger semi-active control for seismic vibration mitigation. Innov Infrastruct Solut 7(1):1–15. https://doi.org/10.1007/s41062-021-00645-3
Asai T, Chang CM, Phillips BM, Spencer BF (2013) Real-time hybrid simulation of a smart outrigger damping system for high-rise buildings. Eng Struct 57:177–188. https://doi.org/10.1016/j.engstruct.2013.09.016
Chen Y, McFarland DM, Wang Z, Spencer BF, Bergman LA (2010) Analysis of tall buildings with damped outriggers. J Struct Eng 136(11):1435–1443
Smith R (2016) The damped outrigger - design and implementation. Int J High Rise Build 5(1):63–70
Spencer M, Dyke BF, Sain SJ (1997) Phenomenological model for magneto-rheological dampers. J Eng Mech 123(3):130–138
Simon D (2006) Optimal state estimation. John Wiley and Sons
Ge M, Sen Chiu M, Wang QG (2002) Robust PID controller design via LMI approach. J Process Control 12:3–13. https://doi.org/10.1016/S0959-1524(00)00057-3
Rao VS, George VI, Kamath S, Shreesha C (2016) Performance evaluation of reliable H infinity observer controller with robust PID controller designed for TRMS with sensor, actuator failure. Far East J Electron Commun 16:355–380. https://doi.org/10.17654/EC016020355
Zaccarian L, Teel AR (2011) Modern anti-windup synthesis. Princeton University Press, Princeton
Ge D, Sun G, Karimi HR (2012) Robust anti-windup control considering multiple design objectives. Math Probl Eng 2012:586279. https://doi.org/10.1155/2012/586279
Zand JP, Sabouri J, Katebi J, Nouri M (2021) A new time-domain robust anti-windup PID control scheme for vibration suppression of building structure. Eng Struct 244:112819. https://doi.org/10.1016/j.engstruct.2021.112819
Kheirkhahan P (2017) Robust anti-windup control design for PID controllers. In: 2017 17th international conference on control, automation and systems (ICCAS), vol 3, pp 1622–1627
Shamsuzzoha M, Lee M (2008) PID controller design for integrating processes with time delay. Korean J Chem Eng 25:637–645. https://doi.org/10.1007/s11814-008-0106-2
Wang Z, Chang CM, Spencer Jr BF, Chen Z (2010) Controllable outrigger damping system for high rise building with MR dampers. In: Sensors and smart structures technologies for civil, mechanical, and aerospace systems, vol 7647
Acknowledgements
We would like to thank the Manipal Academy of Higher Education, Manipal, Karnataka, for providing all the required facilities. We would also like to thank all the referees cited in this paper.
Funding
Open access funding provided by Manipal Academy of Higher Education, Manipal.
Author information
Authors and Affiliations
Corresponding author
Additional information
Technical Editor: Ehsan Noroozinejad Farsangi.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Kavyashree, B.G., Patil, S. & Rao, V.S. Robustness evaluation of the damped outrigger structure. J Braz. Soc. Mech. Sci. Eng. 46, 9 (2024). https://doi.org/10.1007/s40430-023-04584-1
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s40430-023-04584-1