
Abstract
In this paper a kinetic modeling approach for an ecological system is proposed, based on the prey–predator structure in terms of individuals experience. Specifically, a system of nonlinear kinetic equations is formulated using standard tools. Both conservative and nonconservative events are considered since proliferative/destructive rates and an external force field occur. These results are compared to the ones of the classical theory of dynamical system to show their consistency. In addition to a first local analytical result, some numerical simulations are performed. The results thus obtained ensure that the kinetic model behaves in a way consistent with other similar ecological models formulated by dynamical systems, involving ordinary differential equations with lumped dependent variables. For each simulation, stationary solutions are shown. Moreover, oscillations appear for some values of the parameters of the ecological system, and this suggests that bifurcations may appear.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Interacting complex systems have been widely studied in the last decades due to their numerous applications in behavioral dynamics (Della Marca et al. 2023), epidemiology (Dimarco et al. 2020), economy (Bertotti and Modanese 2011), psychology (Bellomo and Carbonaro 2006), opinion dynamics (Cristiani and Tosin 2018), and so on. A broad presentation of topics in mathematical biology is for instance contained in Murray (1993). These studies are mainly related to the development of models. For instance, in epidemiology they can predict the spread of infections, e.g. among human populations, that propagate by contact, Brauer et al. (2008); Hethcote Herbert (2000); Trejos Deccy et al. (2022). In addition, it is possible also to model the individual’s responses in the presence of such critical situations, Capasso and Serio (1978); d’Onofrio and Manfredi (2022); d’Onofrio (2012); Manfredi and D’Onofrio (2013). Models are also widely used in finance and economy (Bouri et al. 2019; Filip et al. 2015; Kyriazis Nikolaos 2020) as well as in psychology (Gençer 2019; Hackman and Katz 2010; Pielke 2003) and demographics (von Foerster 1959). Moreover, the increased availability of fast computing devices has broadened this interest in these applications.
This paper focuses on the study and research of a model for a specific interacting complex system in ecology. A large literature is present towards ecological systems. Among others, the interested reader may refer to Rosenzweig Michael and MacArthur Robert (1963); Sun et al. (2022); Liang et al. (2022); Chowdhury et al. (2022); Li et al. (2022); Zhao and Shen (2022); Sun et al. (2022); Chen et al. (2023), and references therein. For instance, ecological models have been used for studying and preserving interacting populations (Oliveira Nuno and Hilker Frank 2010), for the dynamics of the spread of diseases (see Venturino 2016, and references therein), as well as the control of crop pests (Jana and Kar 2013; Bhattacharyya and Bhattacharya 2006), and in the aquatic environment for preventing harmful algal blooms, which damage the fishing industry as well as tourism, Chattopadhayay et al. (2002). Moreover, they are also useful to combat pollution, see for instance (Bulai and Venturino 2016; Goyal et al. 2014; Misra 2010). In these fields, often complex behaviors are observed, Malchow et al. (2007).
Several sophisticated tools can now be used for the modeling of a complex system with respect to a specific problem. Kinetic theory is one of these. Specifically, it is of relevant interest for modeling interacting systems whose components, also called agents or particles, interact in a binary and stochastic way (see Bellomo 2008; Bertotti and Delitala 2004; Bianca 2012; De Angelis and Delitala 2006, and references therein). Specifically, kinetic theory provides a system either of integro-differential equations or differential equations, depending on the particular model at hand, describing the evolution of the system at a mesoscopic scale. The mesoscopic scale acts as a bridge between two antipodal scales: microscopic scale and macroscopic scale. The microscopic scale describes the stochastic interaction among the agents composing the whole system. At this level, mechanical and non-mechanical variables characterize the evolution. For purposes of this paper, only a scalar non-mechanical variable will be considered, which attains its values in a discrete subset of \({\mathbb {R}}\). However, the macroscopic scale provides the evolution of the whole system. Therefore, the equations of kinetic theory describe the evolution of the system at the mesoscopic scale.
This paper aims at applying the kinetic theory framework to a structured ecological system, where a suitable structured approach is applied. At first, according to classical tools (see again Rosenzweig Michael and MacArthur Robert 1963; Sun et al. 2022; Liang et al. 2022; Chowdhury et al. 2022; Li et al. 2022; Zhao and Shen 2022; Sun et al. 2022; Chen et al. 2023, and references therein), we consider an ecosystem composed of two populations: one of prey and one of predators. The two populations are further divided according to the expertise level. Then, the overall system is divided into four populations. On one hand, there are experienced and inexperienced prey; on the other one, experienced and inexperienced predators. The evolution of the system depends, at least, on the interactions between pairs of individuals, from the four populations. At this point, a kinetic model is introduced for modeling this expertise-level structured ecological system, that may be seen at different scales. At the microscopic scale, a real discrete variable, called activity, is assumed to model the expertise level. It is worth pointing out that a discrete microscopic variable is not so unrealistic for our purposes, since in an ecosystem it is possible to distinguish among a finite number of predators and/or prey, with their related expertise level. In particular, this scale provides the binary and stochastic interactions between pairs of individuals from different populations. The mesoscopic scale furnishes a statistical description of the populations of experienced/inexperienced prey and experienced/inexperienced predators. At this level, suitable distribution functions describe the evolution of each population. The macroscopic scale provides the deterministic evolution of the overall system, by using some kind of moments of the distribution functions.
It is worth pointing out that some attempts in modeling these ecological systems by means of kinetic theory have been already addressed (see, among others, Malcai et al. 2002; Bellouquid and Delitala 2005; Finkelshtein et al. 2013; Toscani and Zanella 2023, and references therein). Nevertheless, this paper provides some novelties. The first novelty lies in the use of tools of kinetic theory for modeling an expertise level structured ecological systems. The expertise level itself represents a novelty in the description of an ecosystem composed of different populations. It is worth stressing that we consider a generic kinetic model, where also nonconservative events are involved. The proliferative/destructive rates are introduced, at the level of stochastic interactions; roughly speaking, they represent nonconservative stochastic interactions between couples of agents. Moreover, at the mesoscopic level, the action of the external environment is considered, by introducing a suitable external force field. These choices are not only of theoretical interest, but they are relevant for applications. Indeed, a more realistic description of an ecological system passes for the introduction of nonconservative events, and the study of related models. From an application viewpoint, proliferative/destructive events may model, for instance, birth/death processes. Instead, the external force field may mimic the impact, with related consequences, of the environment on groups of experienced/inexperienced prey or experienced/inexperienced predators, as well as climatic conditions, level of rainfall, drought. It is worth pointing out that recently a kinetic framework under the action of a suitable external force field has just been used and analyzed in Menale and Munafò (2023), in the context of mathematical epidemiology. To the best of our knowledge, it is the first attempt in this direction, that is the modeling of an expertise-level structured ecological system by using such a nonconservative kinetic framework.
By implementing the above kinetic approach, the four populations’ evolution is described by a system of nonlinear ordinary differential equations, with quadratic nonlinearity. Given a suitable initial data, the related Cauchy problem is defined. Nevertheless, the presence of nonconservative events, i.e. proliferative/destructive rates and external force field, has an important mathematical impact. Indeed, in this situation, some analytical properties may be lost, e.g positivity and boundedness of solution; among the others, blow-up phenomena may appear, Arlotti et al. (1999). At first, we prove a local in time result of existence and uniqueness of a positive and bounded solution under some suitable and realistic assumptions. Then, we provide some numerical simulations to discuss shape and long-time behavior of solutions, under some conditions that reproduce different ecological scenarios. In particular, the long-time behavior of solutions is relevant since global results are still missing if restrictive assumptions on parameters are not considered. In order to prove the consistency of this new kinetic approach, the results are compared to the classical ones of dynamical systems. Moreover, some novelties emerge from this approach. There are consequences of nonconservative events on the dynamics, if compared to the conservative case. In particular, the action of the external force filed influences the long-time behavior of the solution. Moreover, the impact of expertise level is observed on the evolution of the four populations. Furthermore, these numerical simulations seem to suggest that bifurcations may occur.
The paper is organized as follows. Section 2 describes the kinetic model used in this paper, by introducing both conservative and nonconservative interactions, and the action of an external force field; moreover, a result local in time for existence and uniqueness is proved. Section 3 applies the kinetic arguments, presented in previous Sect. 2, for modeling the new ecological framework, structured by using the expertise level. According to this framework, three different scenarios are discussed. In the first scenario, only conservative interactions occur. In the other two, nonconservative events are considered, i.e. proliferative/destructive rates and the external force field. Finally, we return to consider the conservative scheme again where the system parameters are chosen so that oscillations appear. This allows us to perform a first bifurcation analysis, by suitably choosing a bifurcation parameter. A final discussion, with future research perspectives, concludes the paper.
2 The kinetic model
Let us consider an interacting system \({\mathcal {C}}\) composed of particles, also called agents or individuals in what follows, that have a stochastic interaction. Specifically, the system is divided into \(n \in {\mathbb {N}}\) functional subsystems such that particles belonging to the same functional subsystem share the same strategy. The meaning of strategy depends on the particular application taken into account, Bianca (2012). The microscopic state of the system is described by a discrete variable u that acquires its values in a discrete subset of real numbers, i.e.
The distribution function of the i-th functional subsystem is
that gives the number of particles, at time \(t>0\), in the microscopic state \(u_i\). For this paper’s purposes, the i-th functional subsystem, for \(i \in \{1, 2, \dots , n\}\), is characterized by the microscopic state \(u_i\). Moreover, \({\textbf{f}}(t)=(f_1(t), f_2(t), \dots , f_n(t))\) represents the vector distribution function of the overall system.
The macroscopic state is described by introducing the p-th order moment of the system, for \(p \in {\mathbb {N}}\). Specifically, it is defined as
From a physics viewpoint, the zeroth-order moment, the first-order moment and the second-order moment correspond to density, linear momentum and global activation energy, respectively.
The stochastic microscopic dynamics of the system are described by some suitable quantities that model the interactions among particles. Specifically:
-
The interaction rate \(\eta _{hk}\), for \(h,k \in \{1, 2, \dots , n\}\), gives the number of encounters between particles of the h-th functional subsystem and particles of the k-th functional subsystem.
-
The transition probability \(B^i_{hk}\), for \(i,h,k \in \{1,2, \dots , n\}\), gives the probability that a particle of the h-th functional subsystem falls into the i-th functional subsystem after interacting with a particle of the k-th functional subsystem. Since \(B^i_{hk}\) is a probability, hereafter the following property holds true
$$\begin{aligned} \sum _{i=1}^n B^i_{hk}=1, \qquad \forall h,k \in \{1,2, \dots , n\}. \end{aligned}$$(1)
The above parameters allow us to model a conservative system, that is a system where the total number of individuals remains unchanged throughout the evolution. Nevertheless, to gain a more realistic description of some phenomena, nonconservative effects need to be considered, i.e. events that may change the total amount of interacting individuals. First, we assume that the system is subjected to the action of the external environment. This action is modeled by an external force field, that is a function
where
represents the external action on the i-th functional subsystem, for \(i\in \{1, 2, \dots , n\}\).
In some systems, as well as the ecological one of the current paper, the binary interactions, between pairs of individuals, may be nonconservative, Arlotti et al. (1999). Therefore, some nonconservative parameters are here introduced. Specifically, \(\mu _{hk}\), for \(h,k \in \{1,2, \dots , n\}\), represents the proliferative/destructive rate according to encounters between a particle in the state \(u_h\) and a particle in the state \(u_k\). In particular, if \(\mu _{hk}\ge 0\) the events are proliferative, whereas they are destructive if \(\mu _{hk}\le 0\). Thus, the external force field and the proliferative/destructive rates are responsible for the nonconservative dynamics, i.e. the total amount of individuals may change during the evolution.
Bearing all the above in mind, the evolution of the i-th functional subsystem, for \(i \in \{1, 2, \dots , n\}\), is described by the following nonconservative kinetic framework under external action
that is a nonlinear ordinary differential equation, with quadratic nonlinearities. In particular, the first two terms on the right-hand side of the Eq. (2) model the conservative interactions between pairs of particles. The former gives the number of particles that acquire the state \(u_i\), due to interactions between particles in the state \(u_h\) and particles in the state \(u_k\). The latter gives the number of particles leaving the i-th functional subsystem. If the system were subject only to these interactions, the dynamics would be conservative. The third term of (2) accounts for the number of particles acquiring/loosing the state \(u_i\) due to nonconservative interactions, modeled by the rates \(\mu _{hk}\), between particles in the state \(u_h\) and particles in the state \(u_k\). Finally, the term \(F_i(t)\), for \(i \in \{1, 2, \dots , n\}\), is the external action on the i-th functional subsystem; this is a further nonconservative term in the kinetic framework (2). These latter two terms are responsible for the nonconservative dynamics. It is worth pointing out that this is the only term that does not depend on binary interactions between pairs of agents, but only on the i-th functional subsystem itself.
By assigning a suitable initial data \({\textbf{f}}^0\in \left( {\mathbb {R}}^+\right) ^n\), the Cauchy problem or initial value problem related to the above nonconservative kinetic framework is defined by (2), for \(t> 0\), and the initial condition
If nonconservative events do not occur, i.e. neither the third nor the fourth terms of the Eq. (2) are present, the overall system is conservative, i.e. the 0-th-order moment, \({\mathbb {E}}_0[{\textbf{f}}](t)\), that represents the density \(\rho (t)\), is constant during the evolution. Then, standard arguments ensure that there exists a unique positive solution of the Cauchy problem (2)–(3), Bertotti and Delitala (2004). Moreover, if we assume that
then the solution \({\textbf{f}}(t)\) is a probability, i.e.
Instead, in the general framework (2) the global existence in time of a unique positive solution is not guaranteed. In particular, since the density of the system is not conserved, i.e.
blow-up phenomena may occur.
Nevertheless, we can make some parameter assumptions that are not restrictive for the goal of this paper. Under suitable choices, the following result local in time for the existence and the uniqueness of solution of the initial value problem (2)–(3) can be obtained.
Theorem 1
Along with (1), assume that the following assumptions hold true:
-
(i)
There exists \(\eta >0\) such that \(\eta _{hk}\le \eta \), \(\forall h,k \in \{1, 2, \dots , n\}\).
-
(ii)
There exists \(\mu >0\) such that \(|\mu _{hk}|\le \mu \), \(\forall h,k\in \{1,2, \dots , n\}\).
-
(iii)
\(\forall i \in \{1, 2, \dots , n\}\), there exists \(F_i \ge 0\) such that \(F_i(t)=F_i\), for all \(t \ge 0\).
Let \({\textbf{f}}^0=\left( f^0_1, f^0_2, \dots , f^0_n\right) \in ({\mathbb {R}}^+)^n\). Then, there exists a unique local positive solution \({\textbf{f}}(t)\in \left( C\left( [0,\, t_0]\right) \right) ^n\), for \(t_0>0\), of the initial value problem (2)–(3).
Proof
By using standard tools and some easy, but quite long, computations (for details, see Bertotti 2010, and references therein), the assumptions (i)–(iii) and (1) ensure that the right-hand side of Eq. (2) represents a locally Lipschitz operator. Therefore, locally in time, i.e. for \(t \in [0,\, t_0]\), for some \(t_0>0\), there exists a unique solution \({\textbf{f}}(t)\) of the initial value problem (2)–(3).
In order to prove the positivity of this local solution \({\textbf{f}}(t)\), let us rewrite the Eq. (2), for \(i \in \{1, 2, \dots , n\}\), as
where
Straightforward computations allow to obtain
with
Since \({\textbf{f}}^0\in \left( {\mathbb {R}}^+\right) ^n\) and \(F_i(t)=F_i\ge 0\), for all \(i \in \{1, 2, \dots , n\}\) and for all \(t\ge 0\), then the operator \(S_i(t)\) is positive, for all \(i \in \{1,2,\dots , n\}\) and for all \(t \ge 0\). Therefore, the positivity of this operator and the positivity of exponential function ensure the positivity of local solution \({\textbf{f}}(t)\) of the initial value problem (2)–(3). This concludes the proof. \(\square \)
3 The new structured predator–prey model
We consider an environment with four different populations. Specifically, two of these are predators, whereas the other two are prey. The two groups of predators and those ones of prey are ecologically partitioned by considering their experience in hunting and defense. Among the predators, there are experienced predators and inexperienced predators. Similarly, among the prey there are experienced prey and inexperienced prey. Specifically, there is a mechanism of switching process among these groups. For instance, with a certain probability, an inexperienced predator may pass into the set of experienced predators after an encounter with an experienced or inexperienced prey. Moreover, to have a more realistic description, nonconservative events are considered, i.e. proliferative/destructive rates \(\mu _{hk}\) and a positive constant external force field \({\textbf{F}}\). Roughly speaking, the former may represent the birth/death rates, the latter may represent the action of the external environment on each population of the system.
Therefore, this section aims at justifying the introduction of previous kinetic framework to model the evolution of such an environment.
At first, the ecological system is viewed as an interacting system whose individuals are the classes of predators and prey. Specifically, the overall system is divided into 4 functional subsystems such that:
-
1.
The first functional subsystem is composed of experienced predators;
-
2.
The second functional subsystem is composed of inexperienced prey;
-
3.
The third functional subsystem is composed of experienced prey;
-
4.
The fourth functional subsystem is composed of inexperienced predators.
Then, the distribution function on the overall system writes
where \(f_i(t)\), for \(i \in \{1,2,3, 4\}\), is the distribution function related to the i-th functional subsystem. In this context, the p-th order moments \({\mathbb {E}}_p[{\textbf{f}}](t)\) have a specific biological meaning. For instance, the 0-th-order moment represents the total density of the system, i.e. the total number of experienced/inexperienced prey and experienced/inexperienced predators, at time \(t\ge 0\).
In what follows, some scenarios, in both conservative and nonconservative cases, are modeled and analyzed by using the kinetic framework (2), proposed in Sect. 2. Specifically, the parameters of the related four ordinary differential equations are specialized with respect to each scenario. Then, given suitable initial data \({\textbf{f}}^0\in \left( {\mathbb {R}}^+\right) ^4\), the following system of nonlinear ordinary differential equations is derived
In each scenario, the assumptions of Theorem 1 are satisfied.
Since (6) is a system of nonlinear ordinary differential equations, the numerical simulations have been performed by using fourth-order Runge–Kutta method with our own code developed in MATLAB.
3.1 Conservative framework with equilibrium stationary solution
In a first scenario, a conservative system is considered. Specifically, proliferative/destructive rates and external force field are both neglected. Therefore:
-
for all h,k \(\in \{1, 2, 3,4\}\), respectively
$$\begin{aligned} \mu _{hk}=0, \end{aligned}$$ -
for all i \(\in \{1, 2, 3,4\}\) and for all t \(\ge 0\), respectively
$$\begin{aligned} F_i(t)=0, \end{aligned}$$
A uniform initial data is assigned, i.e.
Then, due to the choice of the initial data \({\textbf{f}}^0\) and the conservative structure, Theorem 1 ensures that globally in time there exists a unique, bounded and positive solution, such that
i.e. the total amount of individuals is conserved during the evolution.
The interaction rate \(\eta _{hk}\), for \(h,k \in \{1, 2, 3, 4\}\), furnishes the number of encounters between individuals of the h-th functional subsystem and individuals of the k-th functional subsystem; the values are given in Table 1. It is worth stressing that the largest value is assigned to \(\eta _{hh}\), for \(h \in \{1, 2, 3, 4\}\), since we assume that the major part of the interactions occurs among individuals of the same population. The transition probability \(B^i_{hk}\), for \(i,h,k \in \{1, 2, 3, 4\}\), models the interactions among individuals. Accordingly, there is a pay-off mechanism due to the interaction between experienced/inexperienced prey and experienced/inexperienced predators. For instance, an inexperienced predator (resp. inexperienced prey) may become an experienced predator (resp. experienced prey) after the encounter with an experienced prey (resp. experienced predator), with a certain probability. Specifically, the values and specifications of \(B^i_{hk}\), for \(i,h,k \in \{1, 2, 3, 4\}\), are reported in Tables 2, 3, 4 and 5.
The simulation of this conservative framework is shown in Fig. 1. As expected for this model, the system converges to an equilibrium after some iterations. In particular, the stationary solution is
The impact of expertise level is evident from the numerical simulations. Indeed, both experienced predators and experienced prey tend to predominate in the ecosystem, as shown by the equilibrium \({\textbf{g}}\).

3.2 Nonconservative framework
In a second scenario, two nonconservative cases are analyzed, by properly developing the entire kinetic framework (2).
The interaction rate \(\eta _{hk}\), for \(h,k \in \{1, 2, 3, 4\}\), is modeled in Table 6. Instead the transition probability \(B^i_{hk}\), for \(i,h,k \in \{1, 2, 3, 4\}\), is shown in Tables 7, 8, 9 and 10. It is worth stressing that these values are the same for both cases.
In the first case, we assume an environment with finite resources. We model the consequences of this finiteness by considering some sort of death rate related to each population. Inspired by the classical Lotka–Volterra model, we provide the following values for the nonconservative rates \(\mu _{hk}\):
It is worth pointing out that \(\mu _{ii}<0\), for \(i \in \{1, 2, 3, 4\}\), means a death rate for the i-th population due to interactions between individuals of the i-th population itself, i.e. intraspecific competition. However, the choice of transition probabilities \(B^i_{hk}\), for \(i,h,k \in \{1, 2, 3, 4\}\), according to Tables 7, 8, 9 and 10, models a sort of birth process, still in the Lotka–Volterra approach, due to the quadratic structure of interacting terms of the conservative part of Eq. (2). Moreover, neither proliferation rates nor external factors, i.e. \({\textbf{F}}(t)={\textbf{0}}\), are considered. The initial data is
Then, the nonconservative kinetic framework (2) is used. The assumptions of Theorem 1 are satisfied, hence the problem admits a unique and positive local solution.
The related numerical simulation is shown in Fig. 2. The solution \({\textbf{f}}(t)\) converges to \({\textbf{0}}\), i.e. the extinction of all four populations occurs. Roughly speaking, the nonconservative rate \(\mu _{hh}\), for \(h \in \{1, 2, 3, 4\}\), rules the impact of overpopulation for each species, in the spirit of Lotka–Volterra dynamics. Since the environment does not provide external resources, i.e. \({\textbf{F}}(t)={\textbf{0}}\), the extinction occurs. At the start, only experienced predators grow, and this occurs for two reasons. On one hand, some inexperienced predators pass into the group of experienced ones. On the other one, these predators get food in the interaction with populations of prey. Nevertheless, as prey decrease due to the lack of external resources, the experienced predators also begin to decrease and ultimately vanish as well.
In the second case, along with previous death rates, a positive constant external force field \({\textbf{F}}\) is introduced. Thus,
It furnishes suitable external resources from the environment, in a constant quantity for each species, assuming that these are available in an unlimited fashion. It is worth noting that the amount of resources for inexperienced populations is bigger than for experienced ones. Indeed, \(F_1=F_3=0.01<0.05=F_2=F_4\). This choice is inspired by ecological assumptions. Furthermore, the action of \({\textbf{F}}\) does not depend on the current state of each functional subsystem.
The system is modeled using the kinetic framework (2) with all four components on the right-hand side. Theorem 1 still ensures the existence of a unique and positive solution, locally in time. The numerical simulation of the scheme is shown in Fig. 3. The solution \({\textbf{f}}(t)\) converges to a stationary state \({\textbf{g}}=\left( g_1, g_2, g_3, g_4\right) \ne 0\), such that, according to the nonconservative dynamics,
Roughly speaking, the death rate \(\mu _{hh}\), that characterizes the first case, for \(h \in \{1,2,3,4\}\), is balanced by resources furnished by the environment, which are modeled by a positive constant external force field \({\textbf{F}}\). Indeed, if one removes \({\textbf{F}}\), the solution collapses to \({\textbf{0}}\), i.e. the extinction of all populations. This is in agreement with what is expected. It is worth noting that in this situation coexistence among the four populations is obtained. It is well-known that, under some parameter conditions, the coexistence equilibrium may be stable. If one of these parameters crosses a critical threshold, it could undergo a Hopf bifurcation, and therefore generate a persistent limit cycle. However, crossing the threshold in the opposite direction would lead to the extinction of the cycle, restoring the stable coexistence equilibrium. In Fig. 3, such a stable equilibrium, under the action of a suitable external force field \({\textbf{F}}\), is obtained. Moreover, in a similar way as for the conservative scenario, even in this case, when subjected to the external force field \({\textbf{F}}\), the experienced predators tend to predominate. This is numerically evident since
However, in this scenario, the total number of inexperienced prey exceeds the one of experienced prey, if still compared to the conservative case. At first glance, this may seem peculiar; it could be attributed to the specific choice of the parameters of the system; for instance, they are constant in time.


The solution \({\textbf{f}}(t)\) of the nonconservative framework (second case) with initial data \({\textbf{f}}^0=(0.2, 0.3, 0.3, 0.2)\), parameters according to Tables 6, 7, 8, 9 and 10 and external force field \({\textbf{F}}=\left( 0.01, 0.05, 0.01, 0.05\right) \). No extinction occurs, indeed the solution converges very fast to a stationary state
3.3 Conservative framework with persistent oscillatory solution
Finally, we consider another situation for this expertise-level structured ecosystem with four functional subsystems, where neither nonconservative interactions nor the external force field are present. Thus, only conservative interactions among individuals are allowed, i.e. we use the kinetic model (2) with \(\mu _{hk}=0\), for all \(h,k \in \{1,2, 3, 4\}\), and \({\textbf{F}}(t)={\textbf{0}}\), for \(t\ge 0\). In addition, the interaction rate is assumed to be uniform, i.e.
With this choice, we assume the same number of encounters between individuals from any population. For the transition probability \(B^i_{hk}\), first, we assume that
By this choice, an individual cannot change population after interacting with another individual of the same population. Therefore, it is worth noting that an individual can improve its expertise level only by interacting with different populations. Moreover, the remaining values of \(B^i_{hk}\) are shown in Table 11.
The initial data is
Theorem 1 ensures that there exists a unique and positive solution \({\textbf{f}}(t)\), global in time, such that
The numerical shape of the solution for this case is shown in Fig. 4. Evidently, the solution is periodic. The presence of periodic solutions may indicate the presence of some bifurcation structures in this particular model. This is in agreement with some classical ecological situations, as well as the results of Lotka–Volterra equations, although it is well-known that for the latter, oscillations arise because the equilibrium is a center. Thus, perturbing one of them, another cycle is obtained that does not tend to the former one.
Even in this periodic case, the impact of expertise level clearly appears. Indeed, during the oscillations, the higher peaks are gained by both experienced predators and experienced prey. It is worth stressing that we may expect periodic solutions even in nonconservative cases, i.e. when proliferative/destructive binary interactions and/or external actions occur.

The solution \({\textbf{f}}(t)\) of the conservative framework with persistent oscillatory pattern with initial data \({\textbf{f}}^0=(0.9,\, 0.01,\, 0.02,\, 0.01)\), uniform interaction rate (7) and transition probability according to (8) and Table 11. The solution shows a persistent periodic pattern
However, an analytic study of bifurcations is not possible with the classical approach for the kinetic framework (2), even if in a conservative case, in view of the large number of equations involved and their particular structure. Therefore, this paper aims at providing a first kind of investigation, by using just a numerical simulations viewpoint. Since several parameters are presented, the following method is adopted. We fix all interaction rates, which are uniform, and all transition probabilities, except for the parameter \(B^1_{21}\). Some simulations are provided for different values of this quantity. Moreover, due to the property \(\sum _{i=1}^4 B^i_{hk}=1\), for all \(h,k \in \{1, 2,3,4\}\), if \(B^1_{21}=R\), for \(R\in [0,\, 1]\), then \(B^2_{21}=1-R\). In particular, we assume
where \(i\in {\mathbb {N}}\), such that \(i \in [1,\, 1000]\). Finally, the initial dataset is assigned
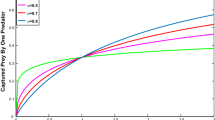
Then, the Cauchy problems related to the same initial data \({\textbf{f}}^0\), for different values of \(B^1_{21}\) and \(B^2_{21}\), i.e. different values of the parameter R, are defined. Theorem 1 ensures their well-posedness, globally in time. The asymptotic solutions of these Cauchy problems are considered, denoted by \({\textbf{f}}^{\infty }=\left( f_1^{\infty }, f_2^{\infty }, f_3^{\infty }, f_4^{\infty }\right) \). In particular, for each value R, according to the previous discrete real set, the maximum and minimum value of the asymptotic solution is considered. Numerically, this is gained by running the algorithm up to the time \(t=1.5\cdot 10^5\). Then, for each value of the parameter the corresponding asymptotic value of \(f_i^{\infty }\), for \(i \in \{1, 2, 3, 4\}\), is used. Figure 5 shows this situation. Specifically, close to the value 0.6 the parameter \(B^1_{21}\) shows a possible bifurcation structure.
Beyond kinetic and mathematical aspects, this analysis concerning oscillations and possible bifurcations has ecological interpretations and impacts. Figure 4 shows oscillations that are sometimes found in empirical ecological data. For instance, such oscillations have been questioned in Gilpin (1973). Moreover, a bifurcation analysis towards only a parameter, i.e. \(B^1_{21}\), could be very useful to further test the model provided by system (2) with experimental data that are certainly affected by some error.

First bifurcation analysis. On the horizontal axis the values of the parameter \(B^1_{21}\). The four plots show the components of the stationary solution \({\textbf{f}}^{\infty }=\left( f_1^{\infty },f_2^{\infty }, f_3^{\infty }, f_4^{\infty }\right) \). The red line represents the maximum value, whereas the black line the minimum value. In a neighborhood of \(B^1_{21}=0.6\) a bifurcation seems to occur
3.4 Hopf bifurcations
We sketch here a possible theoretical approach to the onset of persistent oscillations, to illustrate the difficulties of the problem.
We concentrate in particular on the coexistence equilibrium point, which is obtained by setting to zero the left-hand side of the system (6). This gives a nonlinear algebraic system whose zeros, if they exist, provide the population levels at steady state, namely \({\textbf{f}}^{\infty }=\left( f_1^{\infty },\, f_2^{\infty },\, f_3^{\infty },\, f_4^{\infty }\right) \). Finding explicitly these values is a very hard task. Geometrically, it turns into seeking the intersections of hypersurfaces in a four dimensional space. Most of the times, one can just find sufficient conditions ensuring that one or more intersection points exist, but without exhibiting explicit coordinate values. Furthermore, even if known, these population values \(f_i^{\infty }\), \(i=1,2,3,4\), would depend on the system parameters. Let \(\pi \) represent the set of all the parameters appearing in (6):
Then, the Jacobian of (6) must be determined and evaluated at the equilibrium, \(J({\textbf{f}}^{\infty }(\pi ))\). Of this matrix, the eigenvalues are needed. This means to find the roots of an algebraic equation of degree four:
Now,
while the remaining coefficients \(a_2\) and \(a_3\), respectively, are the sums of the principal minors of order two and three of \(J({\textbf{f}}^{\infty }(\pi ))\). It is to be remarked that all these coefficients depend on the population values at \({\textbf{f}}^{\infty }\), and therefore implicitly on the system parameters. To assess stability, the Routh-Hurwitz criterion (Gantmacher and Brenner 2005) must be used. It requires the nonnegativity of all the \(a_i\)’s and, in this case, in addition the following two conditions:
Let b denote a selected bifurcation parameter, chosen among all the system parameters, so that rewriting the last inequality in (10) as an equation, we have
This would represent the threshold value for which a Hopf bifurcation arises, giving rise to the onset of persistent oscillations. However, (11) is in fact an implicit equation, because the same parameter b in general appears also in the right-hand side, implicitly in the coefficients \(a_i\)’s and as a consequence (11) in general is not a ready-to-use condition to assess the onset of the system limit cycles.
Should we instead be interested in one equilibrium in which one or more population vanish, the above considerations still hold. They however would apply to a point \({\textbf{f}}^{\infty }\) in which some of the components are zero. Some simplifications would follow, but most likely a condition similar to (11) will be found, maybe easier, but most likely still in implicit form.
In view of these considerations, we have investigated the occurrence of limit cycles numerically, Fig. 4.
3.5 A sample of sensitivity analysis
We now provide some examples of how the system responds to changes in individual parameter values. The parameter reference set is given by those of Fig. 3 of Subsect. 3.2. We select a few parameters and plot the equilibrium values of the four populations in each frame of Figs. 6, 7, 8, 9, 10 and 11 as the chosen parameter attains different values in the selected range. The initial data is chosen as follows and kept fixed: \({\textbf{f}}^0=(0.01,\, 0.05,\, 0.01,\, 0.05)\).
In particular, for each case the set of parameter is fixed according to those in Fig. 3, except for one:
-
Case 1 (Fig. 6):
$$\begin{aligned} B^4_{12}=R=0.1+(4\times 0.0001 \times i), \qquad i \in [1,\, 1000]; \end{aligned}$$(12) -
Case 2 (Fig. 7):
$$\begin{aligned} B^2_{31}=R=0.25+(4\times 0.0001 \times i), \qquad i \in [1,\, 1000]; \end{aligned}$$(13) -
Case 3 (Fig. 8):
$$\begin{aligned} \mu _{33}=-R=-0.003-(4\times 0.000001 \times i), \qquad i \in [1,\, 1000]; \end{aligned}$$(14) -
Case 4 (Fig. 9):
$$\begin{aligned} \mu _{44}=-R=-0.003-(4\times 0.000001 \times i), \qquad i \in [1,\, 1000]; \end{aligned}$$(15) -
Case 5 (Fig. 10):
$$\begin{aligned} \eta _{14}=R=0.06+(3 \times 0.00001 \times i), \qquad i \in [1,\, 1000]; \end{aligned}$$(16) -
Case 6 (Fig. 11):
$$\begin{aligned} F_2=R=0.05+(3 \times 0.00001 \times i), \qquad i \in [1,\, 1000]. \end{aligned}$$(17)
The numerical simulations with respect to the above cases (12)–(17), shown in Figs. 6, 7, 8, 9, 10 and 11, highlight a different sensitivity of the model (6) to the different parameters there present. In particular, the long-time solutions, \({\textbf{f}}^{\infty }=(f_1^{\infty }, f_2^{\infty }, f_3^{\infty }, f_4^{\infty })\), exhibit a more pronounced sensitivity to transition probabilities, as shown in Figs. 6 and 7. In this case, the sensitivity pertains to all components of \({\textbf{f}}^{\infty }\), i.e. to all populations involved. When one of the nonconservative parameters, \(\mu _{hh}\), is considered, the sensitivity pertains only the related populations, i.e. the component \(f_h^{\infty }\), as shown in Figs. 8 and 9. However, in this first numerical sensitivity analysis, the interaction rate, \(\eta _{hk}\), seems to be a parameter that does not alter the dynamics of the system; indeed, none of the components of \({\textbf{f}}^{\infty }\) exhibits any sensitivity, as shown in Fig. 10. Finally, with respect to the external force field \({\textbf{F}}\), each population of the system, i.e. \(f_i^{\infty }\), exhibits sensitivity to the related component of \({\textbf{F}}\), i.e. \(F_i\), as shown by component \(f_2^{\infty }\) in Fig. 11 under condition (17). Nevertheless, in this latter case, unlike what occurs with the nonconservative parameters, still some other components exhibit some sensitivity, although less pronounced compared to the component of interest. Indeed, in Fig. 11, the second population, i.e. \(f_2^{\infty }\), exhibits the highest sensitivity to the parameter \(F_2\), but also the third component, \(f^{\infty }_3\), is involved. Anyway, it is worth noting that this represents only a first numerical investigation, as stated above.

Sensitivity analysis, case 1. On the horizontal axis the values of the parameter \(B^4_{12}\) according to (12). The four plots show the components of the stationary solution \({\textbf{f}}^{\infty }=\left( f_1^{\infty },f_2^{\infty }, f_3^{\infty }, f_4^{\infty }\right) \) with respect to the values of \(B^4_{12}\). They all exhibit sensitivity to the parameter \(B^4_{12}\). Nevertheless, the fourth component of \({\textbf{f}}^{\infty }\), i.e. the population of inexperienced predators, is the one that exhibits the highest sensitivity

Sensitivity analysis, case 2. On the horizontal axis the values of the parameter \(B^2_{31}\) according to (13). The four plots show the components of the stationary solution \({\textbf{f}}^{\infty }=\left( f_1^{\infty },f_2^{\infty }, f_3^{\infty }, f_4^{\infty }\right) \) with respect to the values of \(B^2_{31}\). They all exhibit sensitivity to the parameter \(B^4_{12}\). Nevertheless, the third component of \({\textbf{f}}^{\infty }\), i.e. the population of experienced prey, is the one that exhibits the highest sensitivity

Sensitivity analysis, case 3. On the horizontal axis the values of the parameter \(\mu _{33}\) according to (14). The four plots show the components of the stationary solution \({\textbf{f}}^{\infty }=\left( f_1^{\infty },f_2^{\infty }, f_3^{\infty }, f_4^{\infty }\right) \) with respect to the values of \(\mu _{33}\). The second and third components of \({\textbf{f}}^{\infty }\), i.e. the populations of inexperienced and experienced prey, exhibit sensitivity to the parameter \(\mu _{33}\). However, the first and fourth component, i.e. the populations of experienced and inexperienced predators, are not at all influenced by this parameter

Sensitivity analysis, case 4. On the horizontal axis the values of the parameter \(\mu _{44}\) according to (15). The four plots show the components of the stationary solution \({\textbf{f}}^{\infty }=\left( f_1^{\infty },f_2^{\infty }, f_3^{\infty }, f_4^{\infty }\right) \) with respect to the values of \(\mu _{44}\). The first and fourth component of \({\textbf{f}}^{\infty }\), i.e. the populations of experienced and inexperienced predators, exhibit a slight sensitivity to the parameter \(\mu _{44}\). However, the second and third component, i.e. the populations of inexperienced and experienced prey, are not at all influenced by this parameter

Sensitivity analysis, case 5. On the horizontal axis the values of the parameter \(\eta _{14}\) according to (16). The four plots show the components of the stationary solution \({\textbf{f}}^{\infty }=\left( f_1^{\infty },f_2^{\infty }, f_3^{\infty }, f_4^{\infty }\right) \) with respect to the values of \(\eta _{14}\). In this case, none of the populations exhibits any sensitivity to the parameter

Sensitivity analysis, case 6. On the horizontal axis the values of the parameter \(F_2\) according to (17). The four plots show the components of the stationary solution \({\textbf{f}}^{\infty }=\left( f_1^{\infty },f_2^{\infty }, f_3^{\infty }, f_4^{\infty }\right) \) with respect to the values of \(F_2\). The second and third component of \(f_{\infty }\), i.e. the populations of inexperienced and experienced prey, exhibit a sensitivity to the parameter F2. However, the first and fourth component, i.e. the populations of inexperienced and experienced predators, are not at all influenced by this parameter.
4 Conclusions and perspectives
To the best of our knowledge, this paper represents a first attempt at using kinetic theory for modeling an expertise-level structured ecosystem, where both conservative and nonconservative events occur. Indeed, proliferative/destructive binary interactions are considered, and an external force field acts on the system. In particular, the latter term is important for two reasons. On one hand, it does not depend on stochastic binary interaction between pairs of individuals, but only on functional subsystems. On the other one, it does not take into account the current state of functional subsystems themselves. Therefore, a general kinetic model is derived.
At first, we have introduced and discussed the nonconservative kinetic framework under external action (2). The general shape allows us to model both the evolution of an interacting system where conservative and nonconservative interactions between pairs of agents occur, coupled with a generic external force field. Then, we have proved an existence and uniqueness result of a positive solution, at least locally in time, i.e. Theorem 1, by providing a specific analytical shape to the external force field. It is worth pointing out that we could have derived global results, but under too restrictive assumptions, not realist for the ecological purposes of this paper. Accordingly, we have modeled an ecological system composed of four populations: experienced predators, inexperienced prey, experienced prey and inexperienced predators. The overall system is divided into four functional subsystems, according to the four populations. At mesoscopic level, the state of each functional subsystem is described by a suitable distribution function \(f_i(t)\), for \(i \in \{1, 2, 3, 4\}\).
Then, different scenarios have been proposed. After showing the well-posedness of initial value problems, through Theorem 1, a numerical analysis has been performed. At first, in Subsect. 3.1, a conservative case is considered, where neither nonconservative interactions nor external force field occur. The evolution of the overall system depends only on stochastic binary interactions between pairs of individuals of the four populations, modeled by interaction rate \(\eta _{hk}\), for \(h,k \in \{1, 2, 3, 4\}\), and transition probability \(B^i_{hk}\), for \(i,h,k\in \{1, 2, 3, 4\}\). The dynamics converge to a stationary solution, where experienced predators and experienced prey predominate. Subsection 3.2 focuses on two nonconservative scenarios. In a first case, only destructive rates \(\mu _{hk}<0\), for \(h=k\), are considered. Since these nonconservative parameters model the natural death rate of populations, then, at the equilibrium, the evolution of the system gives the extinction of all populations. It is worth stressing that only the population of experienced predators grows in the first instants due to the migrating process from the population of inexperienced predators. However, if a positive external force field is added, then the extinction does not occur, and the system converges to an equilibrium, where experienced predators still predominate. From an ecological viewpoint, this can be seen as a coexistence equilibrium. Roughly speaking, the positive constant external force field models the action of the environment providing resources to all four populations. In particular, it is assumed that the amount of resources for inexperienced populations is bigger than the one for experienced populations; this is motivated by ecological considerations. Since the long-time behavior depends on the presence of the external force field, then a nonequilibrium stationary state of the system has been found, Gallavotti (2004); Bianca and Menale (2019). Therefore, a correspondence between a kinetic nonequilibrium stationary state and an ecological coexistence equilibrium seems to emerge. Finally, Subsect. 3.3 returns to a conservative situation, where an oscillatory pattern now occurs, by assigning suitable values to the parameters of the system, i.e. interaction rate and transition probability. Therefore, in view of this result, a first bifurcation analysis is performed for this situation, by considering different values of one of the parameters of the system. The numerical simulations suggest the possibility that a bifurcation threshold can be determined. The presence of possible bifurcations is of relevant interest, and the reason is twofold. First, providing results towards stability and equilibria is of theoretical interest in a kinetic system, since standard tools cannot be generally used due to the large number of equations and parameters involved. In addition, a bifurcation analysis is suitable in perspective of future tests with experimental data, that are affected by errors.
The first main novelty of this paper is represented by the use of the general nonconservative kinetic framework (2) for modeling a specific ecosystem model, which is characterized by the expertise level. There is an advantage related to the generality and versatility of the framework. Indeed, the kinetic parameters can furnish a more detailed description of the system. The related transition probability ensures a more realistic evolution of dynamics. According to expectations, the numerical simulations confirm the importance of the expertise level; indeed, experienced predators tend to predominate, in long-time evolution of the system. Experienced prey tends to predominate too, even if in some situations inexperienced prey predominate. The impact of nonconservative interactions and external force field appear clearly; indeed more realistic scenarios are thus gained. Among others, extinction and coexistence are obtained. Therefore, the versatility of the system adapts well to different ecological situations, also with respect to the external environment due to the generality of the external force field \({\textbf{F}}(t)\) in the system (1). It is worth noting that the reason for the specific parameter choices of this paper is twofold. On one hand, our aim is to show different patterns that can be quite realistic from an ecological viewpoint. On the other one, we want to emphasize the versatility and generality of the nonconservative kinetic framework (1), through solutions characterized by different shape and long-time behavior.
Of course, this paper represents a first attempt in this direction. Indeed, we recognize some limitations. Among others, the conservative parameters \(\eta _{hk}\) and \(B^i_{hk}\) are assumed to be constant in time and independent with respect to the state of the system; this could be not so realistic for some applications (see for details Holling 1959; Real 1977; Dawes and Souza 2013). In the same direction, we want to work for nonconservative parameters \(\mu _{hk}\) and the external force field \({\textbf{F}}(t)\). Therefore, a research perspective is the study of a framework where parameters, that characterize stochastic interactions, are, at least, time-dependent. For instance, they could be affected by noise, as recently investigated in Bertott et al. (2023), where a system of stochastic differential equations has been derived. Moreover, the numerical simulations provided in Sect. 3 are only numerical experiments. Then, it would be interesting the development of simulations for these frameworks by using experimental data. A further research perspective is the analytical study of the nonconservative framework (2), that is the research of conditions to get existence and uniqueness of a positive and bounded solution, globally in time. In a similar way, it would be interesting to investigate of analytical conditions to obtain some results towards the connection between kinetic nonequilibrium stationary state and coexistence equilibrium. To attain this latter goal, the introduction of a thermostat term, such that one of the moments of the system (2) is kept constant during the evolution, may be suitable both for analytical and ecological reasons (for details towards kinetic thermostatted equations, the interested reader is referred to Bianca (2012); Bianca and Mogno (2018); Bianca and Menale (2019); Menale and Carbonaro (2020), and references therein). Indeed, a thermostat could avoid, at least, blow-up phenomena, ensuring a positive solution for the related initial value problem, globally in time. Moreover, it is reasonable from an application viewpoint, since the total amount of interacting agents (i.e. experienced/inexperienced prey and experienced/inexperienced predators) cannot grow indefinitely over time. In a similar way, a deeper theoretical analysis of stability and bifurcations is mandatory, building upon the numerical investigations provided in Subsects. 3.4 and 3.5. Finally, two further future works open up in perspective. One is the account for systems where the external force field \({\textbf{F}}[{\textbf{f}}](t)\) explicitly depends on the distribution function \({\textbf{f}}(t)\), in order to have a more realistic description. The second work is the continuous version of the kinetic framework (2), discussed in this paper. For this aim, a continuous activity variable has to be considered, that is \(u \in D_u \subseteq {\mathbb {R}}\), where \(D_u\) is a continuous real subset. This choice has not only a pure mathematical reason but also an ecological one. Indeed, a continuous expertise level could better describe the characterization of individuals in a population, for both predators and prey, as just recently is the case in an epidemiological context in Della Marca et al. (2023). A continuous activity variable will lead to a system of nonlinear integro-differential equations. Nevertheless, this would involve also computational problems, beyond analytical ones.
Data Availability
No data availability applicable for this paper.
References
Ashish G, Rashmi S, Misra AK, Shukla JB (2014) Modeling and analysis of the removal of an organic pollutant from a water body using fungi. Appl Math Modell 38(19–20):4863–4871
Bellomo N (2008) Modeling complex living systems: a kinetic theory and stochastic game approach. Springer Science & Business Media
Bellomo N, Carbonaro B (2006) On the modelling of complex sociopsychological systems with some reasoning about kate, jules, and jim. Differ Equ Nonlinear Mech
Bellouquid A, Delitala M (2005) Mathematical methods and tools of kinetic theory towards modelling complex biological systems. Math Models Methods Appl Sci 15(11):1639–1666
Bertotti ML (2010) Modelling taxation and redistribution: a discrete active particle kinetic approach. Appl Math Comput 217(2):752–762
Bertotti ML, Marcello D (2004) From discrete kinetic and stochastic game theory to modelling complex systems in applied sciences. Math Models Methods Appl Sci 14(07):1061–1084
Bertotti ML, Modanese G (2011) From microscopic taxation and redistribution models to macroscopic income distributions. Phys A Stat Mech Appl 390(21–22):3782–3793
Bertotti ML, Carbonaro B, Menale M (2023) Modelling a market society with stochastically varying money exchange frequencies. Symmetry 15(9):1751
Bhattacharyya S, Bhattacharya DK (2006) Pest control through viral disease: mathematical modeling and analysis. J Theor Biol 238(1):177–197
Bianca C (2012) Modeling complex systems by functional subsystems representation and thermostatted-ktap methods. Appl Math Inf Sci 6(3):495–499
Bianca C (2012) Thermostatted kinetic equations as models for complex systems in physics and life sciences. Phys Life Rev 9(4):359–399
Bianca C, Menale M (2019) Existence and uniqueness of nonequilibrium stationary solutions in discrete thermostatted models. Commun Nonlinear Sci Numer Simul 73:25–34
Bianca C, Mogno C (2018) Qualitative analysis of a discrete thermostatted kinetic framework modeling complex adaptive systems. Commun Nonlinear Sci Numer Simul 54:221–232
Bouri E, Gupta R, Roubaud D (2019) Herding behaviour in cryptocurrencies. Finan Res Lett 29:216–221
Brauer F, Van den Driessche P, Wu J, Allen LJS (2008) Mathematical epidemiology, vol 1945. Springer
Bulai IM, Ezio V (2016) Biodegradation of organic pollutants in a water body. J Math Chem 54:1387–1403
Capasso V, Serio G (1978) A generalization of the Kermack- McKendrick deterministic epidemic model. Math Biosci 42(1–2):43–61
Chattopadhayay J, Rup SR, Mandal S (2002) Toxin-producing plankton may act as a biological control for planktonic blooms-field study and mathematical modelling. J Theor Biol 215(3):333–344
Chen M, Takeuchi Y, Zhang J-F (2023) Dynamic complexity of a modified Leslie-Gower predator-prey system with fear effect. Commun Nonlinear Sci Numer Simul 119:107109
Chowdhury PR, Malay B, Petrovskii S (2022) Canards, relaxation oscillations, and pattern formation in a slow-fast ratio-dependent predator-prey system. Appl Math Modell 109:519–535
Cristiani E, Tosin A (2018) Reducing complexity of multiagent systems with symmetry breaking: an application to opinion dynamics with polls. Mult Model Simul 16(1):528–549
Dawes JHP, Souza MO (2013) A derivation of Holling’s type I, II and III functional responses in predator-prey systems. J Theor Biol 327:11–22
De Angelis E, Delitala M (2006) Modelling complex systems in applied sciences; methods and tools of the mathematical kinetic theory for active particles. Math Comput Modell 43(11–12):1310–1328
Della MR, Loy N, Menale M (2023) Intransigent vs. volatile opinions in a kinetic epidemic model with imitation game dynamics. Math Med Biol J IMA 40(2):111–140
Dimarco G, Pareschi L, Toscani G, Zanella M (2020) Wealth distribution under the spread of infectious diseases. Phys Rev E 102(2):022303
d’Onofrio A, Manfredi P (2022) Behavioral sir models with incidence-based social-distancing. Chaos Solitons Fractals 159:112072
d’Onofrio A, Manfredi P, Poletti P (2012) The interplay of public intervention and private choices in determining the outcome of vaccination programmes
Filip A, Pochea M, Pece A (2015) The herding behaviour of investors in the cee stocks markets. Proc Econ Finan 32:307–315
Finkelshtein D, Kondratiev Y, Kutoviy O (2013) Establishment and fecundity in spatial ecological models: statistical approach and kinetic equations. Infin Dimens Anal Quantum Probabil Relat Top 16(02):1350014
Gallavotti G (2004) Entropy production and thermodynamics of nonequilibrium stationary states: a point of view. Chaos Interdiscip J Nonlinear Sci 14(3):680–690
Gantmacher FR, Brenner JL (2005) Applications of the theory of matrices. Courier Corporation
Gençer H (2019) Group dynamics and behaviour. Univ J Educ Res 7(1):223–229
Gilpin Michael E (1973) Do hares eat lynx? Am Nat 107(957):727–730
Hackman JR, Katz N (2010) Group behavior and performance
Hethcote HW (2000) The mathematics of infectious diseases. SIAM Rev 42(4):599–653
Holling CS (1959) Some characteristics of simple types of predation and parasitism1. Can Entomol 91(7):385–398
Jana S, Kar TK (2013) A mathematical study of a prey-predator model in relevance to pest control. Nonlinear Dyn 74:667–683
Kyriazis NA (2020) Herding behaviour in digital currency markets: an integrated survey and empirical estimation. Heliyon 6(8):e04752
Li J, Sun G-Q, Jin Z (2022) Interactions of time delay and spatial diffusion induce the periodic oscillation of the vegetation system. Discrete Contin Dyn Syst B 27(4):2147–2172
Liang J, Liu C, Sun G-Q, Li L, Zhang L, Hou M, Wang H, Wang Z (2022) Nonlocal interactions between vegetation induce spatial patterning. Appl Math Comput 428:127061
Arlotti L, Bellomo N, Latrach K (1999) From the jager and segel model to kinetic population dynamics nonlinear evolution problems and applications. Math Comput Modell 30(1–2):15–40
Malcai O, Biham O, Richmond P, Solomon S (2002) Theoretical analysis and simulations of the generalized Lotka-Volterra model. Phys Rev E 66(3):031102
Malchow H, Petrovskii SV, Venturino E (2007) Spatiotemporal patterns in ecology and epidemiology: theory, models, and simulation. CRC Press
Manfredi P, D’Onofrio A (2013) Modeling the interplay between human behavior and the spread of infectious diseases. Springer Science & Business Media
Menale M, Carbonaro B (2020) The mathematical analysis towards the dependence on the initial data for a discrete thermostatted kinetic framework for biological systems composed of interacting entities. AIMS Biophys 7(3):204–218
Menale M, Munafò CF (2023) A kinetic framework under the action of an external force field: analysis and application in epidemiology. Chaos Solitons Fractals 174:113801
Misra AK (2010) Modeling the depletion of dissolved oxygen in a lake due to submerged macrophytes. Nonlinear Anal Modell Control 15(2):185–198
Murray JD (1993) Mathematical biology. second corrected edition. vol 21, Springer-Verlag, Berlin, pp 225–272
Oliveira Nuno M, Hilker Frank M (2010) Modelling disease introduction as biological control of invasive predators to preserve endangered prey. Bull Math Biol 72:444–468
Pielke JR, Roger A (2003) The role of models in prediction for decision. Models Ecosyst Sci 30:111–135
Real LA (1977) The kinetics of functional response. Am Nat 111(978):289–300
Rosenzweig ML, MacArthur RH (1963) Graphical representation and stability conditions of predator–prey interactions. Am Nat 97(895):209–223
Sun G-Q, Li L, Li J, Liu C, Yong-Ping W, Gao S, Wang Z, Guo-Lin F (2022) Impacts of climate change on vegetation pattern: mathematical modelling and data analysis. Phys Life Rev 43:239
Sun G-Q, Zhang H-T, Song Y-L, Li L, Jin Z (2022) Dynamic analysis of a plant-water model with spatial diffusion. J Differ Equ 329:395–430
Toscani G, Zanella M (2023) On a kinetic description of Lotka–volterra dynamics. Rivista di Matematica della Universitá di Parma. https://doi.org/10.48550/arXiv.2302.14573
Trejos DY, Valverde JC, Venturino E (2022) Dynamics of infectious diseases: a review of the main biological aspects and their mathematical translation. Appl Math Nonlinear Sci 7(1):1–26
Venturino E (2016) Ecoepidemiology: a more comprehensive view of population interactions. Mathe Modell Nat Phenom 11(1):49–90
von Foerster H (1959) Some remarks on changing populations. The kinetics of cellular proliferation. Grune and Stratton, pp 382–407
Zhao L, Shen J (2022) Relaxation oscillations in a slow-fast predator-prey model with weak Allee effect and Holling-iv functional response. Commun Nonlinear Sci Numer Simul 112:106517
Acknowledgements
The research of M. M. has been carried out under the auspices of GNFM (National Group of Mathematical-Physics) of INDAM (National Institute of Advanced Mathematics). EV has been partially supported by the project “Metodi numerici per l’approssimazione e le scienze della vita” del Dipartimento di Matematica “G. Peano”.
Funding
Open access funding provided by Università degli Studi di Napoli Federico II within the CRUI-CARE Agreement. Open access funding provided by Universitá degli Studi di Napoli Federico II within the CRUI-CARE Agreement.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors have no conflict of interest to declare.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Ezio Venturino: Member of the INdAM research group GNCS.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Menale, M., Venturino, E. A kinetic theory approach to modeling prey–predator ecosystems with expertise levels: analysis, simulations and stability considerations. Comp. Appl. Math. 43, 216 (2024). https://doi.org/10.1007/s40314-024-02726-2
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s40314-024-02726-2
Keywords
- Interacting populations
- Structured populations
- Kinetic theory
- Ordinary differential equations
- Bifurcation