
Abstract
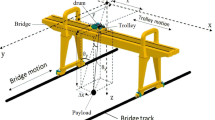
In this study, a model-free adaptive controller (MFAC) using feedback linearization and an adaptive fuzzy sliding mode controller (AFSMC) using fuzzy approximation are employed to control an underactuated overhead crane system. Both controllers use trolley position and load swing angle information for controlling process. Innovation of the proposed MFAC is based on utilizing the appropriate control signal value of last level for determining the control signal value of new level which depends on position error in these levels. In AFSMC, sliding mode scheme is exploited adaptive Sugeno fuzzy algorithm to update estimation of unknown function and counteract the effect of unknown nonlinear terms of overhead crane’s dynamic model. External disturbances such as the wind and the hit are also considered to verify the efficiency of the proposed model-free methods.





Similar content being viewed by others

References
Lee, H., Liang, Y., & Segura, D. (2006). A sliding-mode antiswing trajectory control for overhead cranes with high-speed load hoisting. Transactions of the ASME Journal of Dynamic Systems, Measurement and Control, 128(4), 842–845.
Almutairi, N., & Zribi, M. (2009). Sliding mode control of a three dimensional overhead crane. Journal of Vibration and Control, 15(11), 1679–1730.
Ngo, Q. H., & Hong, K.-S. (2012). Sliding mode antisway control of an offshore container crane. IEEE/ASME Transactions on Mechatronics, 17(2), 201–209.
Park, H., Chwa, D., & Hong, K. S. (2007). A feedback linearization control of container cranes: Varying rope length. The International Journal of Control, Automation, and Systems, 5(4), 379–387.
Le, T. A., Kim, G. H., Kim, M. Y., & Lee, S. G. (2012). Partial feedback linearization control of overhead cranes with varying cable lengths. International Journal of Precision Engineering and Manufacturing, 13(2), 1229–8557.
Yang, J. H., & Yang, K. S. (2007). Adaptive coupling control for overhead crane systems. Mechatronics, 17(2/3), 143–152.
Yang, J. H., & Shen, S. H. (2010). Novel approach for adaptive tracking control of a 3D overhead crane system. Journal of Intelligent Robot System, 62(1), 59–80.
Fang, Y., Ma, B., Wang, P., & Zhang, X. (2012). A motion planning-based adaptive control method for an underactuated crane system. IEEE Transactions on Control System Technology, 20(1), 241–248.
Sun, N., & Fang, Y. (2012). New energy analytical results for the regulation of underactuated overhead cranes: An end-effector motion based approach. IEEE Transactions on Industrial Electronics, 59(12), 4723–4734.
Chang, C. Y. (2007). Adaptive fuzzy controller of the overhead cranes with nonlinear disturbance. IEEE Transactions on Industrial Informatics, 3(2), 164–172.
Wang, L. X. (1993). Stable adaptive fuzzy control of nonlinear systems. IEEE Transactions on Fuzzy Systems, 1, 146–155.
Ngo, Q. H., & Hong, K.-S. (2012). Adaptive sliding mode control of container cranes. IET Control Theory and Applications, 6(5), 662–668.
Le, T. A., Moon, S. C., Lee, W. G., & Lee, S. G. (2013). Adaptive sliding mode control of the overhead crane with varying cable length. Journal of Mechanical Science and Technology, 27(3), 885–893.
Park, M., Chwa, D., & Hong, S. (2008). Antisway tracking control of overhead cranes with system uncertainty and actuator nonlinearity using an adaptive fuzzy sliding-mode control. IEEE Transactions on Industrial Electronics, 55(11), 3972–3984.
Bessa, W. M., & Barrêto, R. S. S. (2010). Adaptive fuzzy sliding mode control of uncertain nonlinear systems. Control & Automação, 21, 117–126.
Ma, Van, & Chen, Xue, Xie, xiaohua (2009). A novel model free adaptive controller with tracking differentiator, IEEE Proceedings of Conference on Mechatronics and Automation, China (pp. 4191–4196).
Hou, Z., & Jin, S. (2011). A novel data-driven control approach for a class of discrete-time nonlinear systems. IEEE Transactions on Control Systems Technology, 19(6), 1549–1558.
Khalil, H. K. (2001). Nonlinear systems (3rd ed.). Upper Saddle River, NJ: Prentice Hall.
Slotine, J. J. E., & Li, W. (1991). Applied nonlinear control. Upper Saddle River, NJ: Prentice-Hall.
Merakeb, A., Achemine, F., & Messine, F. (2013). Optimal time control to swing-up the inverted pendulum-cart in open-loop form, IEEE 11th International Workshop of Electronics, Control, Measurement, Signals and their application to Mechatronics (ECMSM) (pp. 1–4).
Sooyong, J., & Wen, J. T. (2004). Nonlinear model predictive control for the swing-up of a rotary inverted pendulum. Journal of Dynamic Systems, Measurement, and Control, 126(3), 666–673.
Mason, P., Broucke, M., & Piccoli, B. (2008). Time optimal swing-up of the planar pendulum. IEEE Transactions on Automatic Control, 53(8), 1876–1886.
Singer, N., & Seering, W. (1990). Preshaping command inputs to reduce system vibration. Journal of Dynamic Systems, Measurement, and Control, 112(1), 76–82.
Singhose, W., Seering, W., & Singer, N. (1994). Residual vibration reduction using vector diagrams to generate shaped inputs. Journal of Mechanical Design, 116(2), 654–659.
Xie, X., Huang, J., & Liang, Z. (2013). Vibration reduction for flexible systems by command smoothing. Mechanical Systems and Signal Processing, 39, 461–470.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Pezeshki, S., Badamchizadeh, M.A., Ghiasi, A.R. et al. Control of Overhead Crane System Using Adaptive Model-Free and Adaptive Fuzzy Sliding Mode Controllers. J Control Autom Electr Syst 26, 1–15 (2015). https://doi.org/10.1007/s40313-014-0152-4
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40313-014-0152-4