
Abstract
Urban floods are becoming increasingly more frequent, which has led to tremendous economic losses. The application of inundation modeling to predict and simulate urban flooding is an effective approach for disaster prevention and risk reduction, while also addressing the uncertainty problem in the model is always a challenging task. In this study, a cellular automaton (CA)-based model combining a storm water management model (SWMM) and a weighted cellular automata 2D inundation model was applied and a physical-based model (LISFLOOD-FP) was also coupled with SWMM for comparison. The simulation performance and the uncertainty factors of the coupled model were systematically discussed. The results show that the CA-based model can achieve sufficient accuracy and higher computational efficiency than can a physical-based model. The resolution of terrain and rainstorm data had a strong influence on the performance of the CA-based model, and the simulations would be less creditable when using the input data with a terrain resolution lower than 15 m and a recorded interval of rainfall greater than 30 min. The roughness value and model type showed limited impacts on the change of inundation depth and occurrence of the peak inundation area. Generally, the CA-based coupled model demonstrated laudable applicability and can be recommended for fast simulation of urban flood episodes. This study also can provide references and implications for reducing uncertainty when constructing a CA-based coupled model.
Similar content being viewed by others

1 Introduction
Rapid global urbanization as well as the increasing intensity and frequency of extreme precipitation induced by climate change has increased the severity of urban floods across many cities (Zhang et al. 2017; Wu et al. 2017; Wang et al. 2017; Zhang et al. 2018b; Swain et al. 2018; Lai et al. 2020; Hu et al. 2021). Such floods have not only caused huge economic losses, but also have led to great destruction to the environment and ecosystem (Wang, Lai, et al. 2015; Lai et al. 2016; Donat et al. 2017; Zhang et al. 2018a; Chen et al. 2020; Li et al. 2020b; Zhang et al. 2021). It is predicted that approximately 40% of the cities across the globe will be located in flood-prone zones by 2030 (Güneralp et al. 2015).
Numerous measures have been adopted to prevent urban flood disasters and reduce the corresponding losses. Simulations of urban floods via hydrodynamic and hydrological models can effectively detect waterlogging locations, estimate flooded area and submerged depth, reflect the urban hydrological/hydrodynamic process, and even conduct early warning and forecasting (Glenis et al. 2018; Noh et al. 2018; Abebe et al. 2019; Li et al. 2020a; Li et al. 2020c; Li et al. 2022). However, the uncertainty factors potentially derived from the data source, the selection of parameters, and different model algorithms could greatly impact simulation accuracy, which significantly limits the application of hydrological and hydrodynamic models in early warning, prediction, and prevention of floods (Jamali et al. 2019; Liu et al. 2020). Thus, the understanding of how uncertainty factors impact the accuracy of urban flood simulation/prediction is of significance, and more attention should be paid to the uncertainty problem when using these models.
Two-dimensional (2D) inundation models are widely used for urban flood simulations, and the uncertainties of these models can be reflected via inundation extent and water depth (Tsubaki and Kawahara 2013; Zhou et al. 2019). Traditional 2D hydrodynamic models generally compute the overland flow routing process by solving the full or simplified shallow water equations (SWE) (Teng et al. 2017; Willis et al. 2019; Tanaka et al. 2019). For instance, physical-based models, such as InfoWorks ICM,Footnote 1 MIKE FLOOD,Footnote 2 LISFLOOD-FP (Bates et al. 2010); FloodMap (Yu 2010); the second-order MUSCL model (Hou et al. 2015); and other professional 2D models (Sanders et al. 2010; Chen et al. 2018) are widely used examples. Such models are capable of using regular or even irregular meshes to solve the SWE and exhibit high computational accuracies. Their computational efficiency remains relatively low, however, despite the integration of parallel techniques that include Open Multi-Processing (OpenMP) and graphics processing unit (GPU) acceleration (Sanders et al. 2010; Smith and Liang 2013; Vacondio et al. 2016).
Thus, highly efficient models have recently been the focus of much attention (Zhao et al. 2019). A classic example is that the cellular automata (CA)-based models have been applied to the field of urban flood simulations. Dottori and Todini (2011) proposed a 2D CA-based model to simulate the hydrodynamic processes of overland flow by directly employing Manning’s formula to calculate the interaction flow between cells. Ghimire et al. (2013) and Guidolin et al. (2016) successively replaced the transformation algorithm between neighboring cells by rank and weight-based systems. The weighted cellular automata 2D inundation model (WCA2D), the most current CA-based model, is packaged on the open-source version of CADDIES-2D (the 2D module of Cellular Automata Dual-DraInagE Simulation)Footnote 3 software following extensive testing. A WCA2D can generally avoid solving complicated SWE and its optimal efficiency allows for effective urban flood simulations. Yet WCA2D is unable to characterize urban drainage system flows, which has resulted in its integration with 1D hydrodynamic models by mimicking traditional 2D hydrodynamic models (Noh et al. 2018; Abebe et al. 2019; Jamali et al. 2019). Studies that combine WCA2D and 1D hydrodynamic models for urban flood simulations are relatively limited (Yin et al. 2020), and an integrated tool for urban flood simulations can be popularized if this coupling model is favorably developed. Additionally, the uncertainty derived from such a coupling model is yet to be systematically reported. Once the uncertainty is overcome, the coupling model then can be efficiently used if making clear the uncertainty problem.
Uncertainty factors influencing the simulation performance of 2D models generally originate from the data source (Chen et al. 2012; Wang et al. 2018), parameter value variations (Dung et al. 2010; Ozdemir et al. 2013; Yin et al. 2016), and model type (Willis et al. 2019). The majority of research focuses on the uncertainties induced by the resolution of terrain data and its roughness values (Tsubaki and Kawahara 2013; Wildemeersch et al. 2014; Yu et al. 2016). For example, Yu et al. (2016) investigated roughness value sensitivities, the rainfall spatial distribution, and terrain data resolution in the city of Shanghai, identifying the latter two as the most crucial factors in urban flood simulations. Leitão and Sousa (2018) adopted high resolution (0.5 m) terrain data to perform simulations in a small urban catchment in Switzerland and demonstrated the significance of terrain data resolution. Xing et al. (2019) implemented a multi-GPU hydrodynamic model to simulate a typical urban flooding event across a large-scale urbanized domain (267.4 km2) in Fuzhou, and evaluated the simulation accuracy based on terrain data with varying resolutions. The results suggest that higher resolution data achieve more reliable predictions. Therefore, the differences induced by terrain data resolution are considered to be the most significant, while the roughness value and the model itself exert a lower impact.
Because the resolution of rainfall data (that is, time interval and spatial variability) is relatively less frequently investigated, some relevant studies emphasize the use of high-resolution rainfall data (Smith et al. 2013; Bruni et al. 2015), and also acknowledge the greater influence exerted by the rainfall data temporal resolution compared to the spatial resolution (Wang, Ochoa-Rodríguez, et al. 2015; Yang et al. 2016). Despite the considerable progress made on the uncertainty of urban flood simulations, several obstacles remain to be overcome. These include, for instance, how to quantify and visualize the uncertainty factors that impact urban flood simulations; and how to select model data with an appropriate resolution (for example rainfall temporal and DEM (digital elevation model) resolutions) in the coupling model.
Based on the limitations presented in the literature, in the current study we have focused on the following objectives: (1) To establish a coupled model that combines a WCA2D (2D model) and a storm water management model (SWMM, 1D model) for a small urban catchment located in Guangzhou City, China; (2) To evaluate the simulation performance of the coupling model; and (3) To discuss the influences of terrain data resolution, global roughness values, rainfall data temporal resolution, and model type on the accuracy of simulations. Our study has the potential to provide a reference for those wishing to construct a coupled model based on WCA2D and SWMM (short for SWMM/WCA2D). This study also proposes a framework for achieving reliable and high-resolution urban flood simulations by considering multiple uncertainty factors, which can improve our understanding of the factors influencing simulation accuracy. Moreover, our work provides a recommendation on urban flood simulations that contribute to a decrease in the loss induced by urban floods.
2 Study Area and Data
In this study, the Changban catchment in Guangzhou City was chosen as the study case. The catchment conditions and the data were introduced in this section.
2.1 Study Area
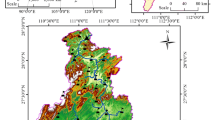
The Changban catchment, located in Guangzhou City with an area of 1.57 km2 (Fig. 1), was selected to conduct the urban flooding simulations. This catchment features a subtropical maritime monsoon climate, mean annual temperatures of 20−22 °C, and a mean annual precipitation of 1720 mm. The northern portion of the catchment is a mountainous region while the southern and central areas are low-lying with highly urbanized areas and dense clusters of buildings. The rainwater piping system, generally distributed in the southern region, features a relatively low standard and can only receive rainfall floods with a return period of lower than 2 years. Therefore, the catchment (particularly the southern region) is vulnerable to flooding due to large rainfall events, an impervious surface that reaches 70% of the surface area, low-lying terrain, and low rainwater piping system standards. For example, on 10 May 2016, the catchment experienced a heavy rainstorm, resulting in the flooding of the southern region. The maximum inundation depth exceeded 1 m at several highway sections and the flood even flowed backward to the subway station. Therefore, this catchment is suitable for urban flood simulations.

Location, elevation, and rainwater piping system of the study area in Guangzhou City, China
2.2 Data
Data for the rainwater piping system within the study area were provided by the Water Bureau of Tianhe District, Guangzhou. Schematization and amendments to the data were required due to the complexity of the actual system. The rainwater in the study area was collected through the pipes (0.1−1.2 m diameter) to the central channel (main pipe), and it then subsequently flows downstream. The single outfall is located downstream to the central channel. The central channel was schematized as rectangular pipelines with a width and height of 1.6−3 m and 1.4−3 m, respectively. The rainwater piping system was schematized with 625 pipelines (channels) and 630 nodes (Fig. 1) following field investigations.
We employed the following three digital elevation model categories: DEM1 (Fig. 1), DEM2, and DEM3. DEM1 was derived from the Bureau of Land Resources and Housing Management of Guangzhou City and has an 8 m × 1 m (horizontal × vertical) resolution. DEM2 was directly generated with a 5 m spatial resolution from the controlling elevation points of the area’s computer-aided design (CAD) topographic map by extraction and interpolation, which increases the elevation of areas containing buildings. Local corrections were then performed to create DEM3 (5 m resolution) based on the actual terrain and features (for example, roads and steps), improving on DEM2. Despite being more accurate, DEM2 and DEM3 only cover the urbanized area (that is, the southern region), while DEM1 covers the entire study area. Thus, we adopted DEM1 to compute the mean slope of each sub-catchment in SWMM, while DEM2 and DEM3 were employed for the 2D urban flood simulations.
The simulations were based on two typical rainstorms that occurred during 7−8 June 2018 (R20180607) and 28−29 August 2018 (R20180828). R20180607 had a rainfall duration of almost 40 h (from 2:10 a.m. 6 June to 5:50 p.m. 8 June), with a total rainfall of 284 mm and a maximum 5-min precipitation of 9.5 mm. The daily rainfall on 8 June reached 215 mm (exceeding the 10-year return period). The rainfall duration of R20180828 exceeded 26 h (from 1:15 a.m. 28.August to 3:30 a.m. 29 August) with a total rainfall of 114 mm and a maximum 5-min precipitation of 9.3 mm. The water depth-time series of the two rainstorms were obtained from the radar water gauge installed in the outfall (Fig. 1) and inundation data (inundation depth and extent) were determined by on-site observations, inquiries, and investigations following the rainstorms.
3 Methodology
The inundation model, uncertainty factors, and their indices are introduced in detail in this section, and the technical route of this research is shown in Fig. 2.

The technical design of this inundation model study in Guangzhou City, China. SWMM storm water management model, WCA2D weighted cellular automata 2D inundation model, LISFLOOD-FP is a two-dimensional hydrodynamic model, DEM digital elevation model
3.1 The Models and Application
A coupled model, based on the storm water management model (SWMM) and weighted cellular automata 2D inundation model (WCA2D), was established to simulate the entire flood formation process. In the coupled model, the SWMM is used to simulate the hydrological and 1D hydraulic process (including rainfall-runoff response, surface runoff, and the pipe network flow), while WCA2D is employed to model the overland flow process. Another coupled model combining SWMM and LISFLOOD-FP (short for SWMM/LISFLOOD-FP) was also adopted for comparison. This section summarizes the details of these models.
3.1.1 Storm Water Management Model (SWMM)
Funded by the United States Environmental Protection Agency, SWMM was initially proposed in 1971 and the current SWMM 5.1Footnote 4 outperforms previous versions in hydrology, hydrodynamics, and water quality simulations. Since its naissance, SWMM has been gradually promoted and applied to urban water management, urban rainfall-runoff simulation, urban inundation simulation, and early warning and forecasting for urban waterlogging and low impact development areas. The SWMM interface mainly includes computing and service capability. The former is the core function that mainly contains the rainfall-runoff, flow routing, and water quality modules. For the runoff generation process, SWMM provides the Horton infiltration Green-Ampt infiltration, and Soil Conservation Service-Curve Number infiltration algorithms. SWMM can use a nonlinear reservoir algorithm to characterize the flow concentration process in subcatchments. As for the flow in a rainwater piping system, hydrodynamic methods (that is, steady flow method, kinematic wave method, and dynamic wave method) are available in SWMM, offering relatively complete solutions. In our study, the Horton infiltration algorithm, nonlinear reservoir algorithm, and dynamic wave methods were adopted. Benefiting from the open source management of SWMM software, the secondary development was conducted to couple SWMM with WCA2D as well as LISFLOOD-FP.
3.1.2 Weighted Cellular Automata 2D Inundation Model (WCA2D)
The WCA2D model was first proposed and developed by Guidolin et al. (2016). Distinct from traditional 2D hydrodynamic models, this model is based on cellular automata theory with a weighted system of transformation rules that increases computational efficiency without considering inertia terms and momentum conservation. The model can deal with multiple meshes (rectangular, hexagonal, or triangular) and different types of cellular neighborhoods (the four cells of the von Neumann (VN) neighborhood or the eight cells of the Moore neighborhood). WCA2D simulates the surface water flow using the following computation processes: weight determination to estimate the flow exchange and distribution of the adjacent cells; water depth calculations; and flow rate calculations. The correlative formulas can be found in previous studies (Guidolin et al. 2016).
Our WCA2D does not use complex physical equations (for example, inertia terms and momentum equations) and thus in theory performs at a higher computational efficiency than traditional physical-based models. Instead the model operates an entirely open source framework that can be highly convenient for secondary development and for its fusion with a 1D hydrodynamic model. Similar to LISFLOOD-FP (Wu et al. 2017), WCA2D is integrated into an executable program (caflood.exe) without a visual interface that is callable via Windows command prompt. Key WCA2D functions include the rainfall sequence input, the boundary condition determination (for example, inflow and water level boundaries), overland flow simulation, and the output of the results (for example, water depth and flow velocity).
We compared WCA2D with the 2D traditional physical-based model LISFLOOD-FP,Footnote 5 which performs simulations by solving the simplified shallow water equations (Bates et al. 2010). LISFLOOD-FP is a raster-based hydraulic model that can simulate 1D hydrodynamics in rivers and canals, as well as 2D overland flows on floodplains (Wu et al. 2017; Wu et al. 2018).
3.1.3 Model Coupling
In order to overcome the inability of the 2D model to simulate the dynamic processes in the rainwater piping system (rainwater pipe network and urban canal), we proposed the fusion of 1D and 2D models to simulate the rainfall-runoff-flood process in the urban area (see Fig. 2). In particular, we coupled SWMM and WCA2D for the urban flood simulations and the framework is summarized as follows: (1) Develop the coupled model interface based on the C# winform, a platform integrated with the SWMM and WCA2D calculation engines; (2) Complete the construction of SWMM and extract the drainage system overflow data as the 2D model input; (3) Generate the model configuration files and prepare the terrain data of the study region; (4) Operate the 2D model calculation engine via the coupled interface to complete the urban flooding process based on the predefined model parameters and input files; (5) Output the 2D simulation results (for example, submerged depth and area) for post-processing using ArcGIS 10.3 and Python 3.8.3. Similarly, we constructed the coupled SWMM/LISFLOOD-FP following steps (1) to (5) in order to compare and verify our proposed model.
3.2 Determination of Uncertainty Factors
We selected the global roughness values, terrain resolution, and rainfall data temporal resolution to explore the uncertainty of the proposed model. These factors are typical uncertainty indicators that originated from model parameters and input data sources (Ozdemir et al. 2013; Bruni et al. 2015; Yu et al. 2016; Willis et al. 2019). Five DEMs with terrain resolutions of 5 m (DEM5m), 10 m (DEM10m), 15 m (DEM15m), 20 m (DEM20m), and 30 m (DEM30m) respectively were generated via the high-quality 5 m DEM detailed in Sect. 2.2. Roughness value ranged from 0.01 to 0.1, with a 0.01 interval. In order to evaluate the temporal resolution of the rainfall data, we employed the rainstorm event R20180607 with high-precision 5 min rainfall data as the original data, and resampled an additional four rainfall datasets with temporal resolutions of 10, 20, 30, and 60 min based on the original data. We simulated different scenarios via the two coupled 2D models—SWMM/WCA2D and SWMM/LISFLOOD-FP—based on the various combinations of terrain resolution, global roughness values, and rainfall data temporal resolution.
3.3 Indices
The Nash-Sutcliffe efficiency coefficient (NSE) and correlation coefficient (R) were employed to quantify the accuracy of the simulated water depth (in SWMM) compared to the observed data in the outfall (Ochoa-Rodriguez et al. 2015; Yang et al. 2016), and the coefficients were calculated as follows:
where t is the simulated time number and ranges from 1 to T; T is the last time number for validation; \(\mathop d\nolimits_{o}\) and \(\mathop d\nolimits_{s}\) are the observed and simulated water depth series; \(Cov\left( {\mathop d\nolimits_{s} ,\mathop d\nolimits_{o} } \right)\) is the covariance between \(\mathop d\nolimits_{o}\) and \(\mathop d\nolimits_{s}\); \(Var\left[ {\mathop d\nolimits_{s} } \right]\) and \(Var\left[ {\mathop d\nolimits_{o} } \right]\) are the variance of \(\mathop d\nolimits_{o}\) and \(\mathop d\nolimits_{s}\), respectively; \(\mathop d\nolimits_{o,t}\) is the observed water depth at time t; \(\overline{{\mathop d\nolimits_{o} }}\) is the arithmetical average of the observed water depth series; and \(\mathop d\nolimits_{s,t}\) is the simulated water depth at time t.
The fit statistic (F) and root mean square error (RMSE) are commonly employed in sensitivity and uncertainty analysis due to their ability to describe the goodness-of-fit and difference between the simulated and comparison results (Yu et al. 2016; Yin et al. 2016; Karamouz and Fereshtehpour 2019), respectively. The fit statistic can be expressed as:
where F is the fit statistics value; \(\mathop A\nolimits_{1}\) is the simulated inundation area; \(\mathop A\nolimits_{2}\) is the inundation area used for comparison; and \(\mathop A\nolimits_{{0}}\) is the overlap area of \(\mathop A\nolimits_{1}\) and \(\mathop A\nolimits_{2}\). The F value ranges from 0 to 1, with values closer 1 indicating a better fit.
The RMSE can reflect the difference between the predicted and reference water depth on the grid scale and can be calculated as:
where \(\mathop d\nolimits_{i,1}\) and \(\mathop d\nolimits_{i,2}\) are the water depth of the ith cell in the simulated and reference inundation results respectively; and n is the amount of inundation cells.
4 Results
We analyzed the calibration and validation results of the coupled inundation model. The impacts of uncertainty factors on inundation simulation performances are also demonstrated in this section.
4.1 Calibration and Validation
The results for calibration and validation of the 1D and 2D simulation were performed using DEM2 and DEM3 for both the SWMM/WCA2D and SWMM/LISFLOOD-FP simulations. The 1D simulations adopted the observed water depth in the outfall induced by rainstorm R20180607 and R20180828 to calibrate and verify the accuracy of the SWMM model. The observed data of R20180607 were employed to calibrate the model parameters, while R20180828 was adopted for verification. The initial model parameter values were determined by referring to existing studies and the model user manual (Wu et al. 2017; Chen et al. 2018). The calibration and validation results (Fig. 3) reveal the ability of the simulated water depth process to reflect the actual variation of water level, with the NSE of R20180607 and R20180828 reaching 0.755 and 0.860 respectively. In addition, the RMSE values between the simulations and observations are relatively low (approximately 0.1), while the R values are high (0.879 and 0.941). These results suggest a strong fit between the simulated results and the observation data, indicating the reliable accuracy of the 1D hydrodynamic simulations.

Calibration and validation of water-depth variation under R20180828 (a) and R20180607 (b) rainstorms
The 2D simulations also used the rainstorms R20180607 and R20180828 for the calibration and verification respectively. The principle calibration parameter of physical-based 2D models is the surface roughness coefficient. Distinct from traditional physical-based models, however, WCA2D can only set one global value of roughness rather than a distributed dataset related to different land use types. The initial global roughness value was determined by averaging the roughness values calculated according to numerous land types. Figure 4a−d present the inundated area map simulated under rainstorm R20180607. The inundation areas are generally distributed in Tianyuan Road (0.5−1 m water depth) and Changban industrial park (0.2−0.5 m water depth). This is consistent with the inundated area from our field survey. The validation results (Fig. 4e−h) of rainstorm R20180828 are also in strong agreement with the field survey data, indicating that the calibration parameters were reasonable.

The simulated and observed maximum inundation extent under 7−8 June 2018 (R20180607) (a−d) and 28−29 August 2018 (R20180828) (e−h) rainstorms. a and e were simulated by the WCA2D model with DEM2, b and f by the WCA2D model with DEM3, c and g by the LISFLOOD-FP model with DEM2, and d and h by the LISFLOOD-FP model with DEM3.
Comparing the 2D simulation accuracy based on DEM2 and DEM3, some areas with greater inundation depth (more than 0.2 m) were distributed outside the observation extents (for example, the area northeast of Tianyuan Road) when adopting the DEM2, suggesting that the overland flow cannot drain to low-lying regions without the correction of terrain data, and this inadequacy is significantly improved in the modeling scenarios adopting DEM3. This indicates that the accuracy of the simulations can be increased after revising the terrain data information. This may be attributed to the obscure low-lying lands contained in DEM2 that potentially do not exist in the actual ground surface. DEM3 overcomes this problem based on site investigations. The DEM3-based simulated inundation is still distributed along Tianyuan Road, while the water depth in these locations is generally low. This may be related to the overland flow traveling along Tianyuan Road to the low-lying areas. Thus, despite the minor differences between the simulation results and measured data, we are able to detect the general inundation extents and water depths. This indicates the high applicability and precision of the coupled model. DEM3 obtained the most reliable predictions and was thus adopted in the subsequent simulations.
4.2 Variance Analysis of Uncertainty Factors
The global roughness values, terrain resolution, rainfall data temporal resolution, and coupled model category were utilized as four kinds of uncertainty factors to investigate their impacts on inundation simulation performance. The intention was to explore what factors would greatly influence the simulation accuracy, and to provide recommendations for achieving more reliable inundation simulations and predictions.
4.2.1 Terrain Resolution and Roughness
Figure 5a presents the maximum inundation extent of SWMM/WCA2D in DEM5m, DEM10m, DEM15m, DEM20m, and DEM30m simulations. Taking the inundation simulation result of DEM5m as the benchmark for comparison, the maximum inundation area decreased as the width of the DEM mesh increased, while high water depth areas (over 0.5 m) were generally distributed on Tianyuan Road. The results of DEM10m and DEM15m were similar to those of DEM5m, and can better predict the inundation area location as well as the water depth compared to DEM20m and DEM30m. At DEM resolutions greater than 20 m, the inundation magnitude in Changban industrial park was clearly underestimated. The DEM5m-based simulated water depth at Tianyuan Road exhibited a deeper inundation at the sides compared to the road center. This also conforms to the actual flooding water distribution in the urban areas. At the DEM resolution of 20 m, the influence of buildings on the route of the overland flow was difficult to obtain. Thus, the inundation extent with DEM resolutions higher than 15 m is significantly larger than that of DEM20m and DEM30m, while the inundation extent of DEM5m, DEM10m, and DEM15m is similar.

Flood maps with n = 0.03 (a) and simulated inundation depth difference between n = 0.1 and n = 0.01 (b) in different DEM resolutions based on WCA2D under the 7−8 June 2018 (R20180607) rainstorm
Figure 5b presents the maximum inundation area differences between simulations based on n = 0.1 and n = 0.01. The maximum water depth differences induced by different roughness values were generally lower than 0.3 m and increased with the DEM resolution. Figure 6 depicts the inundation area statistics at different DEM resolutions and roughness values over time. When DEM5m was used, the peak inundation area appeared later for large roughness values, while the magnitude of the peak inundation area did not exhibit significant variations. Compared to the reference simulation (n = 0.03 at each DEM resolution), the F value was higher for roughness values close to the reference, and reached a minimum at the global roughness of 0.1. In contrast, the RMSE (including the maximum RMSE) decreased for roughness values close to the reference. This indicates a strong agreement between predicted water depth and the reference. According to the temporal variation of inundation area in Fig. 6, when DEM resolution reaches 20 m and coarser, the maximum inundation area begins to exhibit large differences compared to the DEM5m results.

The simulated inundation area, F value, and RMSE variation with different roughness values and DEM resolutions based on WCA2D and under the 7−8 June 2018 (R20180607) rainstorm
4.2.2 Temporal Resolution of Rainstorm
We selected rainstorm R20180607 (with 5 min temporal resolution) as an example and divided it into several temporal resolutions (5, 10, 20, 30, and 60 min). These five datasets with varying temporal resolutions were used to drive the coupled model (SWMM/WCA2D) in order to evaluate the flooding responses to the rainstorm. As demonstrated in Fig. 7a and Table 1, when the temporal resolution decreased to 60 min, the maximum flow decreased from 15.94 to 14.76 m3/s, and the simulated flow process trends were almost equal, despite the varying temporal resolutions. However, the flow peaks during 0−1000 min exhibited large differences across rainfall temporal resolutions. Figure 7b and Table 2 demonstrate that as the temporal resolution decreased from 5 to 60 min, the total node flooding volume of the rainwater pipe network decreased from 11,900 to 5000 m3, the maximum single node flooding volume decreased from 6660 to 2000 m3, and the number of flooding nodes decreased from 26 to 11. Therefore, lower temporal resolution resulted in an underestimation of flow peaks (for example, maximum flow and extremum flow). The degree of this underestimation depends on the rainfall characteristics.

Result statistics with different rainfall temporal resolutions based on WCA2D and under the 7−8 June 2018 (R20180607) rainstorm (n = 0.03): a Simulated flow variation in the outfall; b Flooding flow variation of the drainage system; c Area statistic of the maximum inundation; d Inundation area variation; e The statistic of maximum inundation depth
The underestimation of the node flooding volume in the rainwater pipe network system results in the underestimation of the inundation magnitude. The 2D simulation results (Table 2) demonstrate a decline in the maximum inundation area from 63,525 to 29,700 m2 (53.2%) as the temporal resolution decreased from 5 to 60 min. The decrease was the most significant when temporal resolution reduced from 30 to 60 min. However, for relatively high resolutions (for example, 5, 10, 20, and 30 min), the majority of flooding areas (exceed 2000 m2) were inundated between 0.2 m and 0.5 m, while that of the scenarios of 60 min were inundated between 0.05 m and 0.2 m (Fig. 7c). Areas with water depths exceeding 0.2 m decreased as rainfall temporal resolution became lower (Fig. 8). This suggests the underestimation of the predicted inundation magnitude (including flooding extent and area) at low temporal resolutions, particularly those lower than 30 min (Figs. 7d and e).

Simulated maximum inundation depth with different rainfall temporal resolutions based on SWMM/WCA2D and under the 7−8 June 2018 (R20180607) rainstorm (n = 0.03)
Overall, with the decrease of rainfall temporal resolution, the rainfall intensity would be averaged and then leads to underestimation of the rainfall peak and flow peak. If the rainfall intensity exceeds the capabilities of the drainage system and the node flooding volume, the inundation magnitude (for example, flooding extent and depth) is underestimated. Accordingly, the flooding magnitude is obviously underestimated when precipitation data with a low temporal resolution (for example, lower than 30 min) are used for urban flood simulations via 2D inundation models. This can greatly reduce the accuracy of early warning, forecasting, and preventative applications of urban flood hazard. In order to ensure the accuracy, we suggest that the temporal resolution for long-duration rainstorms should not be lower than 30 min. However, for short-duration rainstorms, further research is required in order to determine the optimal temporal resolution.
4.2.3 Coupled Model Category
In order to explore the uncertainties of the urban flood simulations resulting from model type, we employed SWMM/WCA2D and SWMM/LISFLOOD-FP to simulate the urban flood induced by rainstorm R20180607 of 7−8 June 2018 under different roughness values (from 0.01 to 0.1, 0.01 interval) and different rainstorm temporal resolutions (5, 10, 20, 20 and 60 min). A total of 100 simulations was obtained by combining the different roughness values and rainstorm temporal resolutions. Taking Fig. 9a, the scatter density map for n = 0.03, as an example, it shows that the correlation coefficient and linear regression slope are close to 1. This indicates a similar simulation performance between the two models. Figure 9b presents the water depth difference between the two models, with values mainly lower than 0.1 m. The water depth differences are observed to decline with the temporal resolution of the rainfall data. Table 3 presents the RMSE of the maximum inundation depth between the two coupled models. Table 3 demonstrates that the RMSE values were all in low levels (mainly lower than 0.04 m). The differences between the simulated inundation areas of the two coupled models slightly increased as the roughness value decreased (particularly for n = 0.01). Moreover, the flood process trends were similar, with a decreasing flooded area for reduced rainfall data temporal resolutions (Fig. 10). However, for rainfall temporal resolutions smaller than 30 min, the simulated inundation areas were significantly less than those determined using the high-resolution rainfall data.

Results of different coupled models with different rainfall temporal resolutions: a Scatter density diagram of simulated inundation depth; b Differences of simulated inundation depth between the two coupled models

Simulated inundation areas of the two coupled models with different roughness values and rainfall temporal resolutions. “CA 5 min” means the scenario achieved by using the coupled SWMM/WCA2D model and the rainfall data with a temporal resolution of 5 min; and “LIS 5 min” means the scenario achieved by using the coupled SWMM/LISFLOOD-FP model and the rainfall data with a temporal resolution of 5 min
The simulated results of the two coupled models were generally in agreement, despite distinctly different methodologies. The uncertainties induced by the roughness value and temporal resolution of the rainstorm exceeded those resulting from model type.
5 Discussion
Numerous studies have investigated the uncertainty factors that influence the simulation performances of 2D and coupled models. Coarse terrain data can reduce computing time and prediction accuracy, while high-resolution data are typically limited to small areas due to the large demands of computational resources (Chen et al. 2012; Xu et al. 2021). Coarser terrain data can smooth the elevation difference of flooded areas and weaken the blockage impacts, thus reducing the computational demands (Karamouz and Fereshtehpour 2019). Considering the computational efficiency and the difficulties in collecting high-quality data, we suggest the resampling of high-resolution terrain data to lower resolutions (within an appropriate range) in urban watersheds to obtain a rapid simulation/prediction to guarantee the timeliness for flood control treatment. As demonstrated in this study, employing DEMs with a cell size larger than 15 m to predict inundation events weakens model performance compared to high-resolution DEMs, for example by leading to flood magnitude underestimations. Underestimating the threat of urban floods can be dangerous for disaster prevention and mitigation. Thus, we suggest that the resolution of the DEMs adopted for 2D simulation should exceed 15 m.
Surface roughness is a crucial empirical parameter in 2D models. It represents the blockage effects on the overland flow routing process and can directly impact the arrival time of floodwater (Yu and Coulthard 2015; Yin et al. 2016). Surface roughness was observed to exert a minimal influence on the 2D-simulated maximum inundation extent and water depth. Therefore, as long as the roughness value is set within a reasonable range, the simulated maximum inundation will be relatively accurate. Ozdemir et al. (2013) concluded that the sensitivity induced by various roughness values on flow velocities and arrival times was greater than those on the inundation extent and depth, which agrees with our study.
The spatial and temporal resolutions of the rainfall data are also a critical factor in urban flood simulations. By conducting urban flood simulations in two small urban catchments (1.1 km2 and 0.5 km2), Yang et al. (2016) determined that the modeling sensitivities induced by the temporal rainfall resolution are relatively more obvious than those of spatial resolution. Similarly, Ochoa-Rodriguez et al. (2015) investigated the impacts of spatial and temporal resolution in seven urban catchments and also found that the influence induced by temporal resolution was higher than that of spatial resolution in hydrodynamic modeling. In terms of the impact degree of temporal and spatial resolutions, however, Bruni et al. (2015) suggested that sensitivity to temporal resolution was lower on an urban catchment scale compared to spatial resolution for rainfall data obtained from the X-band dual polarimetric weather radar. This is different from the previously mentioned results and those in the current literature (Gires et al. 2012; Wang, Ochoa-Rodríguez, et al. 2015; Bruni et al. 2015; Yang et al. 2016). Uncertainties caused by spatial resolution cannot be neglected for large study areas. In the current study, we did not consider this factor and focused on the temporal resolution of the rainstorm dataset due to our relatively small study area. Our results demonstrate that underestimation of inundation magnitudes (for example, inundation extent and water depth) at low temporal resolutions occurs frequently. We determined that in order to achieve satisfactory results, resolution greater than or equal to 30 min is necessary.
As for the differences of simulation performance induced by CA-based models and physical-based models, the coupled SWMM/WCA2D and SWMM/LISFLOOD-FP models were used to quantitatively discuss the difference between model types. A strong correlation was generally observed between the two models in terms of the maximum inundation depth and extent, with minimal differences found during the evolution process at both spatial and temporal scales. This is in agreement with previous research (Yin et al. 2020). According to model elapsed time (Table 4), we determined that the coupled model of SWMM/LISFLOOD-FP took almost 3−5 times longer to run than the CA-based model, although they were both equipped with CPU (Center Processing Unit) acceleration technology and all simulations were finished on the same computer with 4 cores (Intel i5-4460). This difference indicates the powerful capacity of the CA-based model to rapidly simulate the flooding extent and depth for real-time forecasting and flood prevention management and planning. This is particularly true for high spatial resolutions and large spatial coverages. In order to further evaluate the computational efficiency of the WCA2D model, more investigations should be conducted in other study areas with different characteristics (for example, with different spatial scales and different urbanization conditions) in future studies. Despite these advantages, the CA-based model still has several limitations. For example, according to Jamali et al. (2019), their CA model was able to fully capture inundation in higher momentum and velocity areas, but could not represent the temporal evolution of flooding and flow velocities. Therefore, further improvement is required in the future.
6 Conclusion
In the current study, we established an integrated coupled model that combines WCA2D with SWMM for simulating the urban flood in the Changban catchment of Guangzhou City, China. We then comprehensively evaluated the simulation performance of the coupling model, and analyzed the influences of terrain resolution, global roughness, rainstorm data temporal resolution, and model type on simulation accuracy. Conclusions can be summarized as:
-
(1)
The WCA2D can be effectively combined with the SWMM model to construct a coupled model for the numerical simulations of urban floods, and its computational efficiency was confirmed to be 3−5 times higher than that of combining a physical-based model, in this instance LISFLOOD-FP, and the SWMM model;
-
(2)
The uncertainty analysis revealed that the influences of terrain resolution and temporal resolution of rainstorm data on performance were significant; a DEM resolution lower than 15 m as well as temporal resolution of rainfall coarser than 30 min would make the inundation simulations less creditable; and
-
(3)
Surface roughness exerts a minor impact on the simulated magnitude of the maximum water depth and the occurrence of the peak inundation area; the simulated urban flood process from a CA-based coupled model was in strong agreement with those of the physical-based coupled model.
The uncertainty analysis in this study can enhance understanding of the effects of the uncertainty factors, and such results can provide reference points for gathering targeted data and for efficient simulations and predictions. Our study case with a complex underlying surface reveals that the CA-based coupled model demonstrates laudable applicability and potential, and can be recommended for fast simulation of urban floods.
Notes
References
Abebe, Y.A., A. Ghorbani, I. Nikolic, Z. Vojinovic, and A. Sanchez. 2019. A coupled flood-agent-institution modelling (CLAIM) framework for urban flood risk management. Environmental Modelling & Software 111: 483–492.
Bates, P.D., M.S. Horritt, and T.J. Fewtrell. 2010. A simple inertial formulation of the shallow water equations for efficient two-dimensional flood inundation modelling. Journal of Hydrology 387(1–2): 33–45.
Bruni, G., R. Reinoso, N.C. van de Giesen, F.H.L.R. Clemens, and J.A.E. ten Veldhuis. 2015. On the sensitivity of urban hydrodynamic modelling to rainfall spatial and temporal resolution. Hydrology and Earth System Sciences 19(2): 691–709.
Chen, A.S., B. Evans, S. Djordjevi, and D.A. Savić. 2012. A coarse-grid approach to representing building blockage effects in 2D urban flood modelling. Journal of Hydrology 426: 1–16.
Chen, B., F. Shi, T. Lin, P. Shi, and J. Zheng. 2020. Intensive versus extensive events? Insights from cumulative flood-induced mortality over the globe, 1976–2016. International Journal of Disaster Risk Science 11(4): 441–451.
Chen, W., G. Huang, H. Zhang, and W. Wang. 2018. Urban inundation response to rainstorm patterns with a coupled hydrodynamic model: A case study in Haidian island, China. Journal of Hydrology 564: 1022–1035.
Donat, M.G., A.L. Lowry, L.V. Alexander, P.A. O’Gorman, and N. Maher. 2017. More extreme precipitation in the world’s dry and wet regions. Nature Climate Change 7(2): 154–158.
Dottori, F., and E. Todini. 2011. Developments of a flood inundation model based on the cellular automata approach: Testing different methods to improve model performance. Physics and Chemistry of the Earth 36(7–8): 266–280.
Dung, N.V., B. Merz, A. Bárdossy, T.D. Thang, and H. Apel. 2010. Multi-objective automatic calibration of hydrodynamic models utilizing inundation maps and gauge data. Hydrology and Earth System Sciences 15(4): 1339–1354.
Ghimire, B., A.S. Chen, M. Guidolin, E.C. Keedwell, S. Djordjević, and D.A. Savić. 2013. Formulation of a fast 2d urban pluvial flood model using a cellular automata approach. Journal of Hydroinformatics 15(3): 676–686.
Gires, A., C. Onof, C. Maksimovic, D. Schertzer, I. Tchiguirinskaia, and N. Simoes. 2012. Quantifying the impact of small scale unmeasured rainfall variability on urban runoff through multifractal downscaling: A case study. Journal of Hydrology 442–443: 117–128.
Glenis, V., V. Kutija, and C.G. Kilsby. 2018. A fully hydrodynamic urban flood modelling system representing buildings, green space and interventions. Environmental Modelling & Software 109: 272–292.
Guidolin, M., A.S. Chen, B. Ghimire, E.C. Keedwell, S. Djordjević, and D.A. Savić. 2016. A weighted cellular automata 2D inundation model for rapid flood analysis. Environmental Modelling & Software 84: 378–394.
Güneralp, B., İ Güneralp, and Y. Liu. 2015. Changing global patterns of urban exposure to flood and drought hazards. Global Environmental Change 31: 217–225.
Hou, J., Q. Liang, H. Zhang, and R. Hinkelmann. 2015. An efficient unstructured MUSCL scheme for solving the 2D shallow water equations. Environmental Modelling & Software 66: 131–152.
Hu, X., M. Wang, K. Liu, D. Gong, and H. Kantz. 2021. Using climate factors to estimate flood economic loss risk. International Journal of Disaster Risk Science 12(5): 731–744.
Jamali, B., P.M. Bach, L. Cunningham, and A. Deletic. 2019. A cellular automata fast flood evaluation (CA-ffé) model. Water Resources Research 55(6): 4936–4953.
Karamouz, M., and M. Fereshtehpour. 2019. Modeling DEM errors in coastal flood inundation and damages: A spatial nonstationary approach. Water Resources Research 55(8): 6606–6624.
Lai, C., X. Chen, Z. Wang, H. Yu, and X. Bai. 2020. Flood risk assessment and regionalization from past and future perspectives at basin scale. Risk Analysis 40: 1399–1417.
Lai, C., Q. Shao, X. Chen, Z. Wang, X. Zhou, B. Yang, and L. Zhang. 2016. Flood risk zoning using a rule mining based on ant colony algorithm. Journal of Hydrology 542: 268–280.
Leitão, J.P., and L.M. de Sousa. 2018. Towards the optimal fusion of high-resolution Digital Elevation Models for detailed urban flood assessment. Journal of Hydrology 561: 651–661.
Li, Q., Q. Liang, & X. Xia. 2020a. A novel 1D-2D coupled model for hydrodynamic simulation of flows in drainage networks. Advances in Water Resources 137: Article 103519.
Li, S., Z. Wang, C. Lai, and G. Lin. 2020b. Quantitative assessment of the relative impacts of climate change and human activity on flood susceptibility based on a cloud model. Journal of Hydrology 588: Article 125051.
Li, S., Z. Wang, X. Wu, Z. Zeng, P. Shen and C. Lai. 2022. A novel spatial optimization approach for the cost-effectiveness improvement of LID practices based on SWMM-FTC. Journal of Environmental Management 307: Article 114574.
Li, Y., Z. Zhang, S. Gong, M. Liu, and Y. Zhao. 2020c. Risk assessment of rainstorm disasters under different return periods: A case study of Bohai Rim, China. Ocean and Coastal Management 187: Article 105107.
Liu, J., W. Shao, C. Xiang, C. Mei, and Z. Li. 2020. Uncertainties of urban flood modeling: Influence of parameters for different underlying surfaces. Environmental Research 182: Article 108929.
Noh, S.J., J.-H. Lee, S. Lee, K. Kawaike, and D.-J. Seo. 2018. Hyper-resolution 1D–2D urban flood modelling using LiDAR data and hybrid parallelization. Environmental Modelling & Software 103: 131–145.
Ochoa-Rodriguez, S., L.-P. Wang, A. Gires, R.D. Pina, R. Reinoso-Rondinel, G. Bruni, A. Ichiba, and S. Gaitan et al. 2015. Impact of spatial and temporal resolution of rainfall inputs on urban hydrodynamic modelling outputs: A multi-catchment investigation. Journal of Hydrology 531(2): 389–407.
Ozdemir, H., C.C. Sampson, G.A.M. de Almeida, and P.D. Bates. 2013. Evaluating scale and roughness effects in urban flood modelling using terrestrial lidar data. Hydrology and Earth System Sciences 17(10): 4015–4030.
Sanders, B.F., J.E. Schubert, and R.L. Detwiler. 2010. ParBreZo: A parallel, unstructured grid, Godunov-type, shallow-water code for high-resolution flood inundation modeling at the regional scale. Advances in Water Resources 33(12): 1456–1467.
Smith, B.K., J.A. Smith, M.L. Baeck, G. Villarini, and D.B. Wright. 2013. Spectrum of storm event hydrologic response in urban watersheds. Water Resources Research 49(5): 2649–2663.
Smith, L.S., and Q. Liang. 2013. Towards a generalised GPU/CPU shallow-flow modelling tool. Computers & Fluids 88: 334–343.
Swain, D.L., B. Langenbrunner, J.D. Neelin, and A. Hall. 2018. Increasing precipitation volatility in twenty-first-century California. Nature Climate Change 8(5): 427–433.
Tanaka, T., Y. Tachikawa, Y. Ichikawa, and K. Yorozu. 2019. An automatic domain updating method for fast 2-dimensional flood-inundation modelling. Environmental Modelling & Software 116: 110–118.
Teng, J., A.J. Jakeman, J. Vaze, B.F.W. Croke, D. Dutta, and S. Kim. 2017. Flood inundation modelling: A review of methods, recent advances and uncertainty analysis. Environmental Modelling & Software 90: 201–216.
Tsubaki, R., and Y. Kawahara. 2013. The uncertainty of local flow parameters during inundation flow over complex topographies with elevation errors. Journal of Hydrology 486: 71–87.
Vacondio, R., F. Aureli, A. Ferrari, P. Mignosa, and A.D. Palù. 2016. Simulation of the January 2014 flood on the Secchia River using a fast and high-resolution 2D parallel shallow-water numerical scheme. Natural Hazards 80(1): 103–125.
Wang, L.-P., S. Ochoa-Rodríguez, J.V. Assel, R.D. Pina, M. Pessemier, S. Kroll, P. Willems, and C. Onof. 2015. Enhancement of radar rainfall estimates for urban hydrology through optical flow temporal interpolation and Bayesian gauge-based adjustment. Journal of Hydrology 531(Part 2): 408–426.
Wang, Z., C. Lai, X. Chen, B. Yang, S. Zhao, and X. Bai. 2015. Flood hazard risk assessment model based on random forest. Journal of Hydrology 527: 1130–1141.
Wang, Z., Z. Zeng, C. Lai, W. Lin, X. Wu, and X. Chen. 2017. A regional frequency analysis of precipitation extremes in Mainland China with fuzzy c-means and L-moments approaches. International Journal of Climatology 37(S1): 429–444.
Wang, Y., A.S. Chen, G. Fu, S. Djordvević, C. Zhang, and D.A. Savić. 2018. An integrated framework for high-resolution urban flood modelling considering multiple information sources and urban features. Environmental Modelling & Software 107: 85–95.
Wildemeersch, S., P. Goderniaux, Ph. Orban, S. Brouyère, and A. Dassargues. 2014. Assessing the effects of spatial discretization on large-scale flow model performance and prediction uncertainty. Journal of Hydrology 510: 10–25.
Willis, T., N. Wright, and A. Sleigh. 2019. Systematic analysis of uncertainty in 2D flood inundation models. Environmental Modelling & Software 122: Article 104520.
Wu, X., Z. Wang, S. Guo, W. Liao, Z. Zeng, and X. Chen. 2017. Scenario-based projections of future urban inundation within a coupled hydrodynamic model framework: A case study in Dongguan city, China. Journal of Hydrology 547: 428–442.
Wu, X., Z. Wang, S. Guo, C. Lai, and X. Chen. 2018. A simplified approach for flood modeling in urban environments. Hydrology Research 49(6): 1804–1816.
Xing, Y., Q. Liang, G. Wang, X. Ming, and X. Xia. 2019. City-scale hydrodynamic modelling of urban flash floods: The issues of scale and resolution. Natural Hazards 96(1): 473–496.
Xu, K., J. Fang, Y. Fang, Q. Sun, C. Wu, and M. Liu. 2021. The importance of Digital Elevation Model selection in flood simulation and a proposed method to reduce DEM errors: A case study in Shanghai. International Journal of Disaster Risk Science 12(6): 890–902.
Yang, L., J.A. Smith, M.L. Baeck, and Y. Zhang. 2016. Flash flooding in small urban watersheds: Storm event hydrologic response. Water Resources Research 52(6): 4571–4589.
Yin, D., B. Evans, Q. Wang, Z. Chen, H. Jia, A.S. Chen, G. Fu, S. Ahmad, and L. Leng. 2020. Integrated 1D and 2D model for better assessing runoff quantity control of low impact development facilities on community scale. Science of the Total Environment 597: Article 137630.
Yin, J., N. Lin, and D. Yu. 2016. Coupled modeling of storm surge and coastal inundation: A case study in New York City during Hurricane Sandy. Water Resources Research 52(11): 8685–8699.
Yu, D. 2010. Parallelization of a two-dimensional flood inundation model based on domain decomposition. Environmental Modelling & Software 25(8): 935–945.
Yu, D., and T.J. Coulthard. 2015. Evaluating the importance of catchment hydrological parameters for urban surface water flood modelling using a simple hydro-inundation model. Journal of Hydrology 524: 385–400.
Yu, D., J. Yin, and M. Liu. 2016. Validating city-scale surface water flood modelling using crowd-sourced data. Environmental Research Letters 11(12): Article 124011.
Zhang, M., M. Xu, Z. Wang, and C. Lai. 2021. Assessment of the vulnerability of road networks to urban waterlogging based on a coupled hydrodynamic model. Journal of Hydrology 603(Part C): Article 127105.
Zhang, Q., X. Gu, V.P. Singh, P. Shi, and P. Sun. 2018a. More frequent flooding? Changes in flood frequency in Pearl River basin, China since 1951 and over the past 1000 years. Hydrology and Earth System Sciences 22(5): 2637–2653.
Zhang, W., G. Villarini, G.A. Vecchi, and J.A. Smith. 2018b. Urbanization exacerbated the rainfall and flooding caused by hurricane Harvey in Houston. Nature 563(7731): 384–388.
Zhang, X., F.W. Zwiers, G. Li, H. Wan, and A.J. Cannon. 2017. Complexity in estimating past and future extreme short-duration rainfall. Nature Geoscience 10(4): 255–259.
Zhao, G., Z. Xu, B. Pang, T. Tu, L. Xu, and L. Du. 2019. An enhanced inundation method for urban flood hazard mapping at the large catchment scale. Journal of Hydrology 571: 873–882.
Zhou, Y., D. Shen, N. Huang, Y. Guo, T. Zhang, and Y. Zhang. 2019. Urban flood risk assessment using storm characteristic parameters sensitive to catchment-specific drainage system. Science of the Total Environment 659: 1362–1369.
Acknowledgements
This study gains financial or data support from the National Key R&D Program of China (2021YFC3001002), the National Natural Science Foundation of China (51879107, 51709117), the Natural Science Foundation of Guangdong Province (2022A1515010019), the Science and Technology Planning Project of Guangdong Province in China (2020A0505100009), the Water Conservancy Science and Technology Innovation Project in Guangdong Province (2020−2028), and the Fund of Science and Technology Program of Guangzhou (202102020216).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Zeng, Z., Wang, Z. & Lai, C. Simulation Performance Evaluation and Uncertainty Analysis on a Coupled Inundation Model Combining SWMM and WCA2D. Int J Disaster Risk Sci 13, 448–464 (2022). https://doi.org/10.1007/s13753-022-00416-3
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s13753-022-00416-3