
Abstract
The weather route presents significant potential in identifying the most efficient route for vessels, enabling the optimisation of distance, time, or fuel consumption. Although there have been notable advancements in most technologies in recent years, weather routing has failed to keep pace with these developments. The purpose of this document is to determine whether a specific IMO’s concept called e-navigation may have an impact on vessel’s route optimisation. Today, mariners are required to integrate heterogeneous data types (hydrographic, weather, oceanographic, etc.) that are transmitted on board via various devices and in diverse formats in order to execute weather routing. When e-navigation becomes operational, relevant marine-related data will be accessible in a standardised format on a unified device. The objective of this work is to examine the potential of S-100 in the context of weather routing and route optimisation for the benefit of navigation. There are two methodologies discussed: manual and automated. A range of S-100-based products will be evaluated in relation to a variety of optimisation algorithms in order to predict whether e-navigation could be advantageous in addressing the weather routing problem. Constraints regarding the implementation of electronic navigation and the mariners’ duties are outlined in the final part of the paper.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Weather and oceanographic data, when combined with nautical information, are essential elements in the process of optimising the vessel’s route (Walther et al. 2016) and the computation of the weather route. The primary aim of weather routing is to identify the most efficient and reliable route for a maritime vessel to arrive at its designated location, taking into account various factors such as wind patterns, wave conditions, ocean currents, meteorological systems, and the performance characteristics of the vessel. Weather routing offers numerous advantages that contribute to the improvement of maritime transportation’s efficiency, security, and environmental impact. Optimisation in the field of logistics has the potential to enhance operational procedures and decrease costs, including voyage and operation costs (Pečený et al., 2020). The weather route determines a set of optimal routes that can be computationally modelled in terms of time, capability, fuel efficiency, safety, and convenience, from the point of departure to the destination point (Kobayashi et al. 2014), it can be utilised to avoid storms, take advantage on the wind, and save fuel (Chen and Balloud 2021). Cartographers and oceanographers, in addition to the experts in engineering, computer science, data science, and maritime economics identified by Zis et al. (2020), make substantial contributions to the analysis of the weather route for the objectives of this study.
Analysing the impact of emerging technologies, specifically the implementation of e-navigation and its associated standard S-100, on the execution of weather routes is an interesting and under investigated topic. By combining marine-related data, the e-navigation concept will enable better management of such data. This document investigates the impact that e-navigation can have on the computation of the weather route via its S-100 based products. A nautical/manual approach is compared to an automated/computer science-focused approach utilising optimisation algorithms (Dijkstra’s, Greedy Best-First-Search, A*, and D*). Interesting is to determine how e-navigation can be utilised to the advantage of mariners in the medium and long term by providing varying degrees of assistance with their duties. This study makes an initial effort to examine the potential integration of weather routes and e-navigation via S-100 based products at the operational level. It investigates how the practical implementation of this concept on-board a vessel could impact navigation execution. It is crucial to investigate the operational outcomes of e-navigation in order to connect with the diverse stakeholders involved in its integration aboard. The outcomes have been used to identify possible issues concerning the work of the master and the Officer of the watch (OOW). This is the structure of the paper: a review of the literature pertaining to weather routing and e-navigation is presented in Sect. 2. Subsequently, potential theoretical applications of S-100-based products are analysed in Sect. 3. Operational applications are delineated in Sect. 4. A manual application of meteorological data is described in Sect. 4.1, while an automated application of S-100-based products is illustrated in Sect. 4.2. According to the findings in Sect. 4, a final Discussion is presented in Sect. 5.
2 The state of the art
The calculation of weather routes is a complex issue that has been subject to varying definitions in the academic literature, as Zis et al. (2020) assert. In 2007, Christiansen et al. coined the term “environmental routing.” The weather route is considered a method that can deal with the complex dynamics of the operating environment of the vessel (Christiansen et al. 2007), voyage optimization modelled on wind propulsion can allow significant carbon savings (Mason et al. 2023). The knowledge of the ship’s behaviour under specific conditions and the availability of reliable weather forecasts are prerequisites for determining an accurate weather route (Vettor and Soares 2016). The utilisation of weather routes has been demonstrated to reduce fuel consumption by 5.6% (Takashima et al. 2004); Kuhlemann and Tierney have estimated that 13.9% of potential savings can be realised through the application of weather data; and Andersson and Ivehammar have reached comparable conclusions (Andersson and Ivehammar 2016). A minor reduction in fuel consumption can result in substantial cost savings for container vessels (Kuhlemann and Tierney 2020). In regard to the cargo and crew’s exposure to roll, pitch, and yaw, it can be advantageous to incorporate weather conditions into route planning to ensure their safety. Severe accidents have been attributed to excessive roll movement in recent years. When combined with degree of freedom (DOF) roll models, a greater awareness and management of weather data may be helpful in relation to ship stability (Maki et al. 2011). A portion of the literature has attempted to combine route optimisation algorithms with meteorological route problems. The primary objectives of the majority of weather routing and route optimisation algorithms are to maximise safety and comfort while minimising time and fuel consumption (Grifoll et al. 2018). In light of the fact that adverse weather is a significant contributor to maritime industry delays, improved application of weather data may also yield advantages in this regard (Notteboom 2006). Weather route methods have evolved from their original purpose of time optimisation to encompass energy efficiency and emission reduction (Vettor and Soares 2016). The growing interest in green shipping and cost reduction has affected the weather route optimisation problem from being a single-objective problem to a dynamic multi-objective problem with multiple constraints (Gao et al. 2020). Objectives such as minimising fuel consumption, greenhouse gas emissions, and voyage time, as well as maximising convenience for passengers and seafarers and ensuring the safety of seafarers and cargo, must be merged in shipping routing. In the past century, numerous approaches have been taken to optimise the path, beginning with the isochrones lines utilised by Hanssen and James; more recent approaches include dynamic programming, genetic algorithms, Dijkstra algorithms, and A* algorithms (Kim and Kim 2017). Guo at al. (2023) have analysed various route optimization algorithms in connection to intelligent ship route optimization technology.
IMO’s e-navigation is expected to ensure the harmonisation of shore services and marine navigational systems once it is fully implemented into physical systems (IMO 2018). The necessity for an optimised decision-making instrument and some unique characteristics of the current maritime transportation environment have increased the demand for e-navigation solutions. Cassara et al. (2023) have analysed it as a decision support system. E-navigation ought to incorporate traditional navigational tools and emerging technologies, while also ensuring the viability of pre-existing services (Weintrit 2011). The notion holds the capacity to significantly influence the effectiveness of maritime transportation (Jeevan et al. 2020). The primary objective of IMO is to establish a superstructure that can effectively manage the integration of cutting-edge technologies, promote greater uniformity, and diminish complexity (IALA 2018). Aware of the volume of information that can be communicated and shared among the various e-navigation services within the e-navigation framework, the International Maritime Organisation (IMO) has introduced the Common Maritime Data Structure (CMDS). A “harmonised data model for all exchanges of digital information between ships or ships and shore within the e-navigation framework” is what CMDS must establish in order to function as a vital component of the e-navigation initiative (Rødseth and Lee 2017). Presently, despite the fact that seafarers are provided with the full data necessary for conscious and secure navigation, this information is disseminated across various devices and is not uniformly managed in accordance with standardised protocols. In order to establish a universally acknowledged standard, it is imperative that all parties impacted by e-navigation participate in the implementation of CMDS, as its development is an ongoing procedure (Čorić et al. 2019). Organisations including the International Association of Lighthouse Authorities (IALA), the International Maritime Organization (IMO), and the International Hydrographic Organization (IHO) are currently laying the groundwork for the implementation of e-navigation. (Park and Park 2016). Despite IMO’s guidance of the e-navigation concept and responsibility for developing technical specifications and standards (IMO 2018), the challenge’s complexity and the necessity of addressing diverse user requirements have prompted IMO to engage in collaborative efforts with other organisations on particular issues, such as the creation of the CMDS. In light of the aforementioned rationales, IMO has opted to utilise the IHO S-100 Universal Data Model (Park and Park 2015) for the implementation of CMDS.
S-100 is intended to provide guidance for the implementation of a contemporary exchange standard for hydrographic and other marine-related data. Park and Park (2017) state, “S-100 provides common data models for a consistent definition of data elements representing data contents”. Since more than a decade ago, IHO has been developing this data model; the organisation recognised the need for a standardised approach to handle heterogeneous data types in the same manner. By utilising the same standard for multiple purposes, interoperability can be achieved among various product categories and maritime data types. The utilisation of diverse data combinations can allow operators access to new information that could potentially benefit the entire maritime community. It is not about providing new data; rather, it is about combining data that already exists within the community in order to maximise its potential. S-100 originated from a previous standard known as S-57 (IHO’s members are presently obligated to generate and disseminate Electronic Navigational Charts (ENC) in this globally accepted format (Kastrisios and Pilikou 2017). S-57 was specifically developed for the purpose of generating ENC. IHO conceived the S100 concept in response to the need to overtake the limitations of the S-57 and cope with emerging technological opportunities; the goal is to create a single standard upon which multiple products can be built.
Upon reviewing the extant body of literature concerning weather routing, it becomes apparent that academics have demonstrated significant interest in this domain, showing a clear upward trajectory in focus throughout the previous decade. The results obtained from analysing the weather route-specific articles in the Scopus database indicate that “computer science” (9.8% of the documents) and “engineering” (28.7% of the documents) comprise the subject areas with the highest productivity. However, it is important to acknowledge that, with the exception of a study conducted by Orlandi et al. (2021), there is a dearth of research in the current field concerning the concurrent evaluation of weather route, optimisation techniques, and e-navigation. In contrast, the scholarly discourse surrounding e-navigation and S-100 focuses predominantly on examining their conceptual framework and standard structure. Nevertheless, the number of studies that explicitly investigate their operational impact is relatively small. The primary objective of this study is to bridge the previously mentioned knowledge divide through the implementation of weather route calculation.
3 Matching together weather route and e-navigation through S-100 based products
Manual computation or specialised software may be used to determine the weather route. It is imperative to recognise that the manual weather routing process can be complex and time-consuming. In order to automate this process, modern maritime vessels frequently rely on specialised non-official software and onboard devices that use advanced algorithms and real-time meteorological data. The usage of weather-oceanographic data from ECDIS via S-100 can enhance the official computation of the weather route in two ways:
-
Manual computation will be easier due to the fact that the necessary data will be available on one device and in a standardised format;
-
Automated computation based on official data displayed on an IMO-approved device (ECDIS) will have increased reliability.
E-navigation’s impact on both computational approaches is examined in the current paper. The discussion of the manual approach outlined in Sect. 4.1 is conducted via a case study that encompass the navigation from Leghorn to Barcelona. In Sect. 4.2, a summary of a variety of widespread pathfinding algorithms applied with S-100-based products is presented. The two approaches may also be classified according to time. The initial one is a medium-term strategy in which seafarers will use e-navigation to assist them in making initial-level decisions. The second is a long-term strategy in which automated navigational solutions will be available via e-navigation. The ultimate objective of the two sections is to predict a potential operational application of electronic navigation for a particular nautical practice.
4 Taking into consideration currents and weather for computing the weather route with S-100 based products
Navigation considers currents for the computation of the vessel’s drift and set. The forces of wind, the Coriolis effect, salinity, temperature, cabeling, and waves combine to generate currents, a macro-oceanographic phenomenon. S-111-based products will provide current data within e-navigation. The S-111 Product Specification allows for the determination of currents through in situ or remote measurement, analytic methods, or hydrodynamic models. S-111 can structure surface current data through grid coverage or point coverage. The data provided by S-111 are not limited to direction and speed; they also include data quality information (like the accuracy of sensors, mathematical modelling techniques, the accuracy of harmonic constants, etc.). Because currents are horizontal water movements, once their orientation and intensity are known, their influence over vessel motion is easy to compute. The vessel motion and the current need to be considered as vectors whose sum gives a result vector characterised by the set (or direction of the movement) and the drift (speed of the movement). The interaction between currents and ship motion can be considered straightforward.
The wind represents the natural movement of the air, and in navigation, it is considered for both the computation of leeway and the determination of no-go areas. Wind is an important aspect of maritime navigation since it influences a vessel’s speed, direction, stability, and overall efficiency. Understanding wind dynamics and making informed decisions to limit its impacts while optimising the ship’s course is part of skilled navigation. The effects of wind on a ship depend on the characteristics, design, and dimensions of the vessel. Different ship classes and their individual characteristics interact with the wind in various ways. Three different S-100-based products, collectively known as S-41X, provide the weather overlay in e-navigation:
-
S-412 provides wave and weather hazards through the use of polygons;
-
S-413 provides wave and weather conditions through graphics and gridded data;
-
S-414 provides wave and weather observations through point-based data.
The S-41X Weather Overlay aims to improve the current onboard radio fax charts for weather purposes. S-413 will provide information about wind velocity and direction, wind gusts, and the wind wave. Through S-412, S-41X offers a data set that enhances marine domain awareness, enabling better selection of “go areas” and “no-go areas” in relation to precipitation, cyclones, and other weather hazards. The computation process of the wind force over the course of the vessel is not as straightforward as the one seen with the currents; the effect of wind on the ship’s heading also depends on the vessel’s specific characteristics. During installation, the Electronic Chart Display System (ECDIS) could upload the vessel-specific reaction to the wind. When determining the weather route, one must apply leeway to the set and drift to determine the true course.
4.1 Analysing the manual approach to weather routing
In the present section, a case study is presented to analyse how the availability of S-100 data over ECDIS can be beneficial for seafarers when dealing with the weather route. The goal is to investigate the potential operational benefits that seafarers can derive from the accessibility of a wide range of maritime data through a single ECDIS. An IHO study has analysed possible important e-navigation impact for seafarers (Palma et al. 2023), S-100-based products result to be a great decision support tools for mariners. Considering that with e-navigation ECDIS decision support role will be boosted, it is reasonable to forecast possible benefits for seafarers in terms of reduced complexity and automated tasks. The technique outlined can be classified as either manual or nautical in nature, pertaining to the use of S-100-based products. Seafarers derive advantages from the improved accessibility and presentation of data in activities that are already performed using traditional methodologies. In a hypothetical situation where products based on the S-100 standard are designed to serve as decision support tools, the S-100 ECDIS is expected to enhance its effectiveness in aiding mariners.
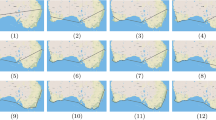
To examine the impact of e-navigation on maritime operations, a case study has been chosen to focus on the optimisation of vessel management from a specific perspectives. The navigation from Leghorn (Italy) to Barcelona (Spain) was taken into consideration. The example is based on a vessel whose set speed is fixed at six nodes and where the OOW is asked to plan a route taking into consideration currents and winds. In e-navigation terms, the OOW is asked to plan the faster route based on S-101, S-111, and S-41X data. Figure 1 shows the data available on ECDIS already today; the operator has only the availability of ENCs; in terms of e-navigation, only S-101 is displayed. In Fig. 2, currents are taken into consideration; the S-101 data is overlapped by S-111. In the last figure, finally, to the S-101 and S-111 data, the weather overlay with wave and weather conditions (S-413) is applied.
In Fig. 1, based on the cartographic representation provided by ENCs, the shorter route is drawn; currents and wind are not yet taken into consideration, and the true course (Tc) is 253°. Considering that the OOW is working with the gyrocompass, the true course matches the true heading. The route distance is 382 nm, and at 6 nodes, the vessel will take 2 days and 15 h to get to Barcelona. The current ECDIS, when used in planning mode, is capable of computing the Estimated Time of Arrival (ETA) only by taking distance and speed into consideration.

Route planning with only S-101 data
With e-navigation, if currents are taken into consideration on ECDIS, the S-101 ENC and S-111 current charts can be overlapped. In this way, when computing ETA, the influence of currents can also be considered. Based on the S-111 information, an alternative route capable of taking advantage of the currents has been computed. As shown in Fig. 2, the new path is composed of four edges. For each edge, the true bearing will not match the true course due to the current effect.

Route planning with S-101 and S-111 data
In Table 1, the S-101 and S-111 data are taken into consideration for route planning. In the table, the current data together with the true course, true bearing, and speed are reported. With unchanged set speed (6 knots), even though the computed route is 17 Nm longer, it allows, through the efficient usage of the current data, to arrive at the destination 12 h before.
The analysis is not over yet; it is time now to consider how the wind will affect navigation (Fig. 3). The wind effect, even though in the case analysed it does not change the route selected, varies the weight associated with the speed. In Table 2, the data related to the effect of the wind over the vessel course is shown as a function of the vessel movement (2°stb/+0,5 knots means that the wind will cause a 0,5 knots leeway of 2° towards the starboard side). Considering the true course of the vessel, the new true bearing and speed have been computed. Even though the distance has remained the same, the total time has changed, leading to an increase of 2 h in comparison to the one computed only with currents.

Route planning with S-101 S-111 data and S-413
The comparative analysis offered is still lacking in comprehensiveness. In order to ascertain the efficiency of the master’s selected weather route, it is important to calculate the impact of currents and wind on the shortest course given a constant set speed of 6 knots. Hence, the route, characterised by a true heading of 253° and a distance of 382 nm, has been partitioned into four segments, each characterised by consistent currents and wind conditions (Fig. 4).

Shortest route from Leghorn to Barcelona divided into four paths
The impact of the current on the vessel’s set speed has been calculated for every edge, as outlined in Table 3. Additionally, a revised estimation of the journey duration has been derived, including the inclusion of S-101, S-111, and S-41X. The ultimate stage in the analysis is the examination of the impact of wind on the vessel. The following table presents the impact of wind on the vessel. Considering the effects of ENC’s ocean currents and wind patterns, it can be projected that the vessel, maintaining a constant speed of 6 knots, would have completed the journey to Barcelona within a duration of 2 days and 19 h.
Table 4 allows a conclusive comparison between the quickest route and the meteorological path. By analysing the diverse S-100 data, it is feasible to compute that the weather route enables a reduction in travel time of 14 h as compared to the shortest route. The integration of S-101, S-111, and S-4 × 1 has facilitated the calculation of a more accurate and inclusive ETA, enabling the master to make a more informed decision when selecting the optimal course. The integration of the three PS holds significant promise, even outside weather routing applications, as it enables enhanced vessel management through more efficient estimation of the ETA.
In the example provided, the proper knowledge of both current and wind data has allowed the OOW to choose the faster route. E-navigation and S-100 based products have bene used as a decision support system capable of facilitating the manual computation of the weather route. The availability of these data on ECDIS has allowed the data enhancement into a weather route capable of taking advantage of the marine environment. The weather/oceanographic phenomena have allowed to reduce time and arrive faster at the destination, in other cases, their computation can lead to other optimal solutions like the shortest route, the less fuel-consuming route, the route with the less GHG emissions or the more stable route.
4.2 Analysing the automated approach to the weather route
4.2.1 Dijkstra’s algorithm
In the case of a graph connected by weighted edges, Dijkstra’s Algorithm can be used to find the shortest or optimal distance connecting two nodes. The nautical chart can be considered a graph where points can be connected through edges or paths. With this algorithm, it is necessary to consider that any of the edges can have a negative value, which means that the cost associated with each edge cannot be negative. In the case of vessel route optimisation, the prerequisite of positive wages given to the edges is always observed. The algorithm, after calculating the cost of using different edges, chooses the more convenient path. Dijkstra provides a deterministic method for solving a discrete optimisation problem with a specific objective, like finding the shortest path (Walther et al. 2016) or the least fuel-consuming path. Dijkstra’s Algorithm process can be summarised as follows:
Visit the starting point;
-
Examine the closest not-yet examined vertex;
-
The last vertex examined is added to the set of examined vertices;
-
The process is repeated until the endpoint is reached.
The algorithm can be used to find both local and global best ship routes; it can consider different types of control variables like the heading of the ship, the engine power, and the speed of the ship. Navigational constraints can be represented through the use of weights assigned to the edges (Walther et al. 2016). The current nautical charts are used to identify the “go” and “no go” areas. The “go areas” are those covered by a water column capable of guaranteeing the safety of navigation in connection to the keel of the ship. The “no go” areas are represented not only by land, obstructions, and other obstacles but also by unsurveyed zones or those areas characterised by pool quality surveys (low zone of confidence). With S-100, other types of “no go” areas can be visualised and integrated with those that are already available on ECDIS; today, even though these areas are available on other documents and devices, they are not processed through a common standard and cannot be merged autonomously. An example can be the usage of S-412 with wave and weather hazards. The availability of non-homogeneous types of data processed through standardised procedures will allow their combination into new useful information. S-100 will allow these data to be interoperable and possibly managed by optimisation algorithms like Dijkstra’s.
Within Dijkstra’s framework, it is interesting to analyse the influence of the combined usage of specific S-100-based products (S-101 + S-111 + S-41X). The use of S-101 charts will continue to provide navigable areas where ships can sail, S-111 will provide currents, and S-41X will provide the weather overlay. The combined usage of the three different S-100-based products can provide information about currents and winds (direction and intensity) that can be used to calculate the resistance of the ship to weather and oceanographic conditions and to assign weights to the various paths computed. The integration of the various S-10X data is made easier thanks to the common standard used to process the information. S-100, through the integration of wind (S-413), currents (S-111), and, in some cases, ice (S-411), can represent the baseline for the application of Dijkstra’s algorithm over official data. The weather and oceanographic phenomena will be represented through specific feature objects that are characterised by specific attributes (for example, orientation and speed). In the case of currents and wind, each feature object will be represented by a vector whose direction and speed are specified through the encoding of the related attributes. The integration of the available vectors can be used to calculate the sea resistance and to assign, for Dijkstra’s purposes, a weight to the analysed edges.
4.2.2 Greedy best-first-search
The Greedy Best-First-Search expands the node that is closest to the end node, and instead of selecting the node closest to the starting point, it selects the node closest to the goal. The expansion is only based on the distance from the end node (Kumar 2013); the algorithm is called “greedy” because it only pays attention to getting closer to the goal (Lipovetzky 2014). Even though the result is not optimal, it is often efficient. Sometimes, Greedy Best-First-Search even though it can follow paths that at first sight can look promising, explores paths that keep getting longer (Mackworth 2017); this happens especially when you have obstacles in your area. Greedy Best-First-Search looks inadequate for ship routing, as it is more efficient when the optimal path needs to be calculated between two points that do not have any obstacles that can negatively affect the algorithm. In a ship’s routing, land, shallow waters, underwater rocks, obstructions, marine protected areas, and marine farms are just some of the examples of obstacles that can affect the algorithm negatively. The previous examples refer to features that are already displayed on ECDIS with the current S-57 ENC; in the future, other S-10X products can introduce other obstacles, for example:
-
S-129 (Under Keel Clearance Management) other “vessel’s specific no go” areas;
-
S-412 (wave and weather hazards) can introduce “no go area for weather reasons” (hurricanes for example),
-
S-122 (MPA-Marine Protected Areas), aside from the MPA already shown on the current charts, can also indicate MARPOL areas where a certain type of vessels cannot have access;
-
S-127 (Marine Traffic Management) can indicate areas with a higher density of vessels that for safety reason is convenient to avoid;
-
S-411 (Ice Overlay) with the ice information.
It is possible to affirm that with the current S-57 ENC, the Greedy-Best-First-Search can be used only in the open ocean where there are no hydrographic and topographic obstacles; with S-100, its application in the open ocean also depends on weather conditions. The proposed S-10X product specifications are capable of identifying additional no-go zones in the open ocean, rendering Greedy-Best-First-Search unsuitable.
4.2.3 A*
When it comes to pathfinding, A* is the most commonly used algorithm for finding the shortest path. The algorithm collects together the speed of the Greedy Best-First-search in the case of no obstacles and the efficiency of Dijkstra’s in the case where obstacles exist between the starting and arrival points. The algorithm is very similar to Dijkstra’s with the exception that it incorporates a heuristic on how close a given location is to the goal; if some information about the world is given, it is possible to avoid analysing some nodes. In analysing the A* algorithm, two functions need to be considered:
-
g(n): exact cost of moving from the starting point to any vertex;
-
h(n): estimated cost for vertex n to the arrival node.
-
A* examines each vertex with the lowest f(n) = g(n) + h(n).
Usage scenarios:
-
When h(n) = 0, A* turns into Dijkstra’s algorithm;
-
When h(n) < g(n) A* is guaranteed to find the shortest path, the lower is h(n) and the slower is A* as it expands more;
-
A lower g(n) allows A* to be faster, but the finding of the shortest path is not guaranteed;
-
When g(n) = 0, A* turns into the Greedy Best-First Search.
A* provides a trade-off between speed and accuracy; the choice of which aspect prevails depends on the ECDIS CPU speed, the type of voyage that is needed to be planned (oceanic route, coastal route, etc.), the scale of the S-10X charts that are used for planning, and the number of obstacles in the working area. For areas with a lot of no-go areas like archipelagos, administratively managed areas, and areas with ice, a g(n) = 0 is preferable. When sailing in the open sea with good weather conditions, h(n) = 0 could be applied, as it allows the algorithm to be faster. For A*, S-100 can be beneficial in the same way it has been shown for Dijkstra’s (See Fig. 5).

The A* algorithm’s components
4.2.4 Dynamic A* (D*)
D* is a variant of A* that allows changes after the initial path is computed; it can be used in domains that are not completely known. The algorithm was conceived to recalculate paths when the original information was grossly incomplete (Stentz 1995). Each time a piece of relevant new information comes out, the A* path is no longer valid and must be recalculated. In route optimisation problems, D* fits perfectly with the possibility to have more detailed data about traffic, weather, and currents only on short notice. With A*, once we find the optimum path, all the information except the path is thrown away; D*, on the other hand, keeps this information. Long-term forecasts are not always as accurate as short-term ones. The algorithm, starting from the A* path, is capable of making small corrections without taking too much time. It repairs the original path through a small arc correction applied in its current vicinity; only a portion of the path is corrected and re-planned (Stentz 1994). D* is an incremental heuristic search method that combines incremental and heuristic search to speed up the process; it reuses information from the previous search to speed up the current search and solve the problem much faster (Deo and Pang 1984). D* allows the modelling of the marine environment as a dynamic environment.
For the application of D*, the initial path can be used considering S-100-based products like S-101 (ENCs), S-201 (Aids to Navigation), S-122 (Marine Protected Areas), S-111 (Currents), S-412 (Weather Overlay), etc. When new data like S-124 (Navigational Warnings), S-127 (Marine Traffic Management), or the same S-412 is available, the system can re-plan the shortest path starting from the current coordinates. The process is repeated till the vessel arrives at the destination.
4.3 The weather route as function of S-100 based products
When computing the weather route, currents and wind are the primary factors that need to be analysed and managed. By implementing S-100, these phenomena can be managed in a more streamlined and user-friendly environment. Following the examination of the potential applications of S-100-based products by optimisation algorithms, is now presented a comparative analysis.
Within e-navigation, S-111 will provide current’s data. Given the dynamic nature of currents over time, Greedy Best First search is not a suitable optimisation method. Dijkstra’s and A* (where g(n) = 0) currents may be utilised when their values are derived via hydrodynamic models and analytic methods, and their behaviours are known in advance. When considering values derived from measurements that are more susceptible to temporal variation, D* has resulted to be the more opportune option.
Conversely, the meteorological data required for determine the leeway and avoid no-go areas will be supplied by S-41X based products. The application of leeway data will allow for the availability of more accurate weights that can be applied to the various directions that are analysed by the optimization algorithms. As previously stated, weather data serves a purpose beyond wind and should also be employed to demarcate hazardous regions for the vessel. Due to the dynamic character of weather data, D* can be utilised to model the wind more effectively. Dijkstra’s and A* are exclusively applicable to shorter routes, during which the sole available weather forecast at the departure point can be computed and no further updates are accessible throughout the voyage.
After having analysed how currents and weather can affect ship motion, the route optimization problem is now structured into two specific steps: the determination of “no-go areas” and the computation of weather-oceanographic factors. The first step (determination of no-go areas) is preparatory for allowing the algorithm to know where to investigate possible solutions. Within ECDIS and e-navigation, the S-100-based products taken into consideration, in this first phase are:
-
S101 ENC: land areas, shallow waters, obstructions, low-quality areas, and other obstacles (like underwater rocks or wrecks);
-
S-412 wave and weather hazards: low-pressure areas, windy areas, cyclones, hurricanes, typhoons, etc.;
-
S-411 Ice information: Icebergs, bergy bits, growlers.
The list provided is not exhaustive, as many other products like S-122 (Marine Protected Areas) or S-127 (Marine Traffic Management) can be included. As this document is primarily focused on weather routing, it was chosen to limit the list to S-101, S-412, and S-411. The integration of the various data will help the seafarers to better locate the various type of no-go areas.
After the “no-go areas” determination, for the second step, the weights to the paths need to be assigned. For the present document, the following S-100 product specifications are considered:
-
S-111 Surface Currents: determination of the drift and set;
-
S-413 wave and weather conditions: computation of the leeway.
Most of the information displayed on the ECDIS has a dynamic nature, only S-101 has a more static nature. All the other product specifications analysed represent data that change over time; in some cases, the information is provided in real-time. The usage of other S-100 base products apart from S-101 makes A* algorithm not the ideal choice for the weather route problem. D*, on the other hand, resulted as being more suitable as it better adapts to the type of S-111 and S-41X data.
As shown in Table 5, D* appears to be the best option in terms of route optimization, Greedy Bet-First Search, on the other hand, is the less feasible one. Dijkstra’s and A* are not suitable for being used with time varying data and, they can be used only with routes during which no weather forecast updates are available.
Before utilising S-100 in combination with route optimisation algorithms, it is necessary to define a graph that delineates the boundaries of the navigational region. The resolution of a graph determines its characteristics, and S-100 can handle high-resolution graphs thanks to the abundance of data it makes available. Not always the most detailed course is the optimal choice. Once the S-100-based products are deployed, their data will be used to support human decision-making. The optimisation algorithms responsible for computing the route should aim to strike a balance between accuracy and feasibility. The utilisation of highly precise navigation paths will likely be limited to future scenarios where autonomous vessels rely on S-100 data.
5 Discussion and conclusions
Through the deployment of S-100-based devices on board, e-navigation will affect the way navigation is planned and monitored in the coming years. The availability of non-homogeneous data handled under a common standard may allow for the extension of ECDIS capabilities. The implementation of S-100 would not only enhance maritime situational awareness but also facilitate more deliberate planning and execution of navigation activities. S-100 will enable not just increased marine awareness, but also more conscious navigation planning and execution.
For the same goal (computation of weather routing), two different application approaches for S-100 data have been given in this document. Following an examination of how S-100 can assist traditional nautical practises (manual approach), an automated approach to S-100 data was presented, and the primary route optimisation algorithms were examined. To be effective, comprehensive e-navigation deployment should be a gradual process capable of combining today’s best practises with e-navigation capabilities. The preceding chapter case scenarios might be viewed as a hypothetical timeline for the full adoption of e-navigation on-board:
-
1.
Usage of S-100 data for enhancing the manual handling of current navigational practices;
-
2.
Usage of S-100 for automating current navigational practices;
-
3.
Usage of S-100 data for unmanned vessels.
The initial bullet point indicates the transition towards the S-100 ECDIS; during this phase S-100 data will be utilised to assist seafarers in their duties. From the perspective of route optimisation, e-Navigation and S-100-based products, beginning with official data, can serve as a preliminary stage in determining the optimal route. S-100 will enable the processing and management of all maritime domain data in an integrated manner. With improved access to maritime data, mariners will be able to better manage meteorological and oceanographic phenomena, resulting in increased efficiency, safety, and comfort. By enhancing maritime awareness, S-100-based products can facilitate a reduction in voyage and operational costs. The next step requires the proactive involvement of e-navigation in the execution of navigation tasks. The application of the optimisation techniques that were mentioned in Sect. 4 can be envisaged in this stage. Based on the data presented, it was determined that the D* algorithm demonstrates superior capability in considering the peculiarities of weather and currents, as well as the potential of S-100. S-111 and S-41X based products offer time-varying data that can be efficiently handled by the D* algorithm. Accurate computation of this dataset has the potential to greatly enhance navigation management. As previously stated, the implementation of e-navigation to automate navigation operations necessitates the establishment of a dedicated legal framework that delineates the associated duties. Autonomous ships will be the main topic of the last phase. The complete elimination of human involvement in navigation can only be envisaged when the digitalization of marine domain data reaches its final stage and navigational practises are fully automated by specialised algorithms. The implementation of automated navigation practises will enable the complete utilisation of the potential benefits offered by e-navigation. In the context of applying route optimisation algorithms, the absence of human limitations eliminates the need to consider the trade-off between accuracy and feasibility.
The digitization and standardization of maritime data can be seen as an opportunity for the entire maritime community; innovative use of this data can be beneficial for traditional nautical practices such as weather route planning and monitoring. Considering that S-100-based products are not yet fully implemented, a broader study of the function of S-100 as a function of specific navigation practices may help institutions to get a better picture of the role of S-100 in future maritime operations.
References
Andersson P (2016) Ivehammar Pernilla, Cost Benefit Analysis of Dynamic Route Planning at Sea, Transportation Research Procedia, Volume 14, Pages 193–202, ISSN 2352 – 1465, https://doi.org/10.1016/j.trpro.2016.05.055
Cassara P, Di Summa M, Gotta A, Martelli M (2023) E-Navigation: a distributed decision support system with extended reality for Bridge and Ashore Seafarers. IEEE Trans Intell Transp Syst 24(11):13384–13395. https://doi.org/10.1109/TITS.2023.3311817
Chen H, Ballou P (2021) Art and Science of Ship Voyage Optimization: A Critical Review
Christiansen Marielle F, Kjetil N, Bjørn R, David (2007) Chap. 4 Maritime Transportation, Editor(s): Cynthia Barnhart, Gilbert Laporte, handbooks in Operations Research and Management Science, vol 14. Elsevier. Pages 189–284,ISSN 0927 – 0507, ISBN 9780444513465,https://doi.org/10.1016/S0927-0507(06)14004-9
Čorić M, Gudelj A, Lušić Z, Mandžuka S (2019) Naše More: Int J Maritime Sci Technol 663:120–129. https://doi.org/10.17818/NM/2019/3.4. E-Navigation Architecture Overview and Functional Connection Analysis
Deo N, Pang CY (1984) Shortest-path algorithms: taxonomy and annotation. Networks 14:275–323. https://doi.org/10.1002/net.3230140208
Gao Z, Li Y, Cui J (2020) A multi-objective routing optimization model for ship intelligent navigation. J Phys: Conf Ser 1684. https://doi.org/10.1088/1742-6596/1684/1/012115
Grifoll Manel M, Lluis C, de Marcel FX (2018) Ship weather routing using pathfinding algorithms: the case of Barcelona – Palma de Mallorca, Transportation Research Procedia, Volume 33, Pages 299–306, ISSN 2352 – 1465, https://doi.org/10.1016/j.trpro.2018.10.106
Guo D, Yin Y, Xiao F (2023) Overview of intelligent ship route optimization methods. Chin J Ship Res 18(4):151–161. https://doi.org/10.19693/j.issn.1673-3185.02911
IALA, Navguide (2018) Marine aid to navigation manual
IMO (2018) E-navigation strategy implementation plan, MSC.1/Cir. 1595, London
Jeevan J, Ramamoorthy K, Salleh NHM et al (2020) Implication of e-navigation on maritime transportation efficiency. WMU J Maritime Affairs 19:73–94. https://doi.org/10.1007/s13437-020-00194-z
Kastrisios C, Pilikou M (2017) Nautical cartography competences and their effect to the realisation of a worldwide electronic navigational charts database, the performance of ECDIS and the fulfilment of IMO chart carriage requirement. Mar Policy 75:29–40. https://doi.org/10.1016/j.marpol.2016.10.007
Kim B, Kim T (2017) Weather routing for offshore transportation using genetic algorithm. Appl Ocean Res 63:262–275. https://doi.org/10.1016/j.apor.2017.01.015
Kobayashi E, Yoneda S, Morita. A (2014) Advanced route optimization in ship navigation, 2014 4th International Conference On Simulation And Modeling Methodologies, Technologies And Applications (SIMULTECH), 572–577, https://doi.org/10.5220/0005033805720577
Kuhlemann S, Tierney K (2020) A genetic algorithm for finding realistic sea routes considering the weather. J Heuristics 26:801–825. https://doi.org/10.1007/s10732-020-09449-7
Kumar E (2013) Artificial Intelligence. I.K. International Publishing House Pvt. Limited, India
Lipovetzky N (2014) Structure and inference in Classical Planning. Lulu.com, Spagna
Mackworth AK, Poole DL (2017) Artificial Intelligence: foundations of computational agents. Cambridge University Press, Regno Unito
Maki A, Akimoto Y, Nagata Y, Kobayashi S, Kobayashi E, Shiotani S, Ohsawa T, Umeda N (2011) A new weather-routing system that accounts for ship stability based on a real-coded genetic algorithm. J Mar Sci Technol 16:311–322
Mason J, Larkin A, Bullock S, van der Kolk N, Broderick JF (2023) Quantifying voyage optimisation with wind propulsion for short-term CO2 mitigation in shipping. Ocean Eng 289. https://doi.org/10.1016/j.oceaneng.2023.116065
Notteboom TE (2006) The time factor in liner shipping services. Marit Econ Logist 81:19–39
Orlandi A, Cappugi A, Mari R, Pasi F, Ortolani A (2021) J Mar Sci Eng 9(5):502. https://doi.org/10.3390/jmse9050502. Meteorological Navigation by Integrating Metocean Forecast Data and Ship Performance Models into an ECDIS-like e-Navigation Prototype Interface
Palma V, Giglio D, Tei A (2023) Investigating the introduction of e-navigation and S-100 into bridge related operations: the impact over seafarers. WMU J Maritime Affairs 22:37–58. https://doi.org/10.1007/s13437-022-00286-y
Park D, Park S (2015) Multimed Tools Appl 74:6573–6588. https://doi.org/10.1007/s11042-014-2242-5. E-Navigation-supporting data management system for variant S-100-based data
Park D, Park S (2016) Multiple-domain marine data utilization structure for e-navigation. Cluster Comput 19. https://doi.org/10.1007/s10586-015-0521-1
Park D, Park S (2017) Syntactic-level integration and display of multiple domains’ S-100-based data for e-navigation. Cluster Comput 20:721–730. https://doi.org/10.1007/s10586-017-0754-2
Pečený Lumír P, Meško R, Kampf J, Gašparík (2020) Optimisation in Transport and Logistic Processes, Transportation Research Procedia, Volume 44, Pages 15–22, ISSN 2352 – 1465, https://doi.org/10.1016/j.trpro.2020.02.003
Rødseth Ø, And Lee K (2018) Supporting Operational Data Exchanges in Shipping with the Common Maritime Data Structure, Proceedings of MTEC2017
Stentz A (1994) The D* Algorithm for Real-Time Planning of Optimal traverses. Carnegie Mellon University, Pittsburgh, PA, CMU-RI-, TR-94-37
Stentz A (1995) The focussed D* algorithm for real-time replanning. In Proceedings of the 14th international joint conference on Artificial intelligence - Volume 2 (IJCAI’95), 1652–1659
Takashima K, Hagiwara H, Shoji. R (2004) Fuel saving by Weather Routing –Simulation using actual Voyage Data of the Container ship. J Japan Inst Navig 111:259–266
Vettor R, Guedes Soares C (2016) Development of a ship weather routing system. Ocean Eng 123:1–14 ISSN 0029-8018. https://doi.org/10.1016/j.oceaneng.2016.06.035
Walther L, Rizvanolli A, Wendebourg M, Jahn C (2016) Modeling and optimization algorithms in Ship Weather Routing. Int J e-Navigation Maritime Econ 4:31–45. https://doi.org/10.1016/j.enavi.2016.06.004
Weintrit A (2011) Development of the IMO e-Navigation Concept – Common Maritime Data Structure. In: Mikulski, J. (eds) Modern Transport Telematics. TST 2011. Communications in Computer and Information Science, 239, https://doi.org/10.1007/978-3-642-24660-9_18
Zis Thalis PV, Harilaos N, Psaraftis L Ding (2020) Ship weather routing: a taxonomy and survey. Ocean Eng 213(107697):0029–8018. https://doi.org/10.1016/j.oceaneng.2020.107697
Funding
Open access funding provided by Università degli Studi di Genova within the CRUI-CARE Agreement.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Palma, V., Giglio, D. & Tei, A. Investigating the influence of e-navigation and S-100 over the computation of the weather route. WMU J Marit Affairs (2024). https://doi.org/10.1007/s13437-024-00344-7
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s13437-024-00344-7