
Abstract
Ultrasonic imaging is a useful nondestructive testing technology for visualizing internal structural defects in structures. Despite its utility, since synthetic aperture focusing technique (SAFT) algorithm demands using advanced equipment to superimpose the measurements, this paper introduces a novel approach named CMU-SAFT to broaden applicability of SAFT on conventional ultrasonic data obviating the necessity for matrix antenna array-equipped devices and preventing hyperbolic patterns. To validate the feasibility of the proposed algorithm, experimental tests were conducted on a laboratory-produced concrete specimen including delamination defects at varying depths. Since other reflectives causing distortion in the ultrasonic image can interfere with the signal, the study also evaluated the influences of different noise suppression filters along with their combinations (band pass, wavelet transform, Wiener, and Savitzky–Golay). CMU-SAFT images were constructed using eleven filter combinations, and their performances were quantitatively assessed using signal-to-noise ratio, signal-to-noise and distortion ratio, total harmonic distortion, root mean square, mean squared ratio, mean absolute error and cross-correlation. The most effective filters and performance indices aligning with CMU-SAFT images considering defect depth and scanning width were suggested. The findings of the study revealed the leading potential of CMU-SAFT algorithm to overcome the need for specialized equipment by utilizing recommended filters and indicators under specific conditions.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Civil infrastructures can face different types of damage during their service lives due to various environmental and loading conditions. The damage state of these infrastructures can be monitored by elastic wave-based nondestructive testing methods. One of these methods is ultrasonic inspection, and the main principle of this testing involves the reflection of ultrasonic waves sent by a transducer from boundaries or defects, which are then detected by other receivers [1, 2]. Thus, the location of a defect can be determined by measuring the time elapsed until the wave reflected by the discontinuities reaches the receiver. To process and transform the obtained ultrasonic signals into images, the synthetic aperture focusing technique (SAFT) algorithm is commonly employed [1,2,3,4,5,6,7,8]. SAFT algorithm was developed to eliminate the distortions in ultrasonic images resulting from the heterogeneous structure of concrete. Issues such as scattering and mode-conversion of ultrasonic waves, arising from variations in distance between the examined point and the ultrasonic sensor, contribute to delays in signal arrival times. These delays lead to hyperbolic and unfocused images [9]. SAFT effectively tackles these challenges by improving the accuracy and focus of ultrasonic images by compensating the effects of concrete heterogeneity and overcoming challenges related to wave scattering and mode conversion. SAFT corrects time delays [10]. This results SAFT to provide more precise damage inspection due to higher image resolution and clearer reflections of flaws [11], delaminations [3] and reinforcements [12] in concrete [13, 14]. While there is a significant amount of studies exist in the literature demonstrating the effectiveness of SAFT for concrete [3, 12, 13, 15, 16], current research topics also encompass the machine learning of images for automated damage detection [17,18,19,20,21,22].
As seen, while numerous studies in the literature presents the effectiveness and improvement of the SAFT technique for concrete, it is important to note that the method relies on creating an image through the superimposition of pulse-echo measurements from various points. This necessitates the repetition of experiments by relocating receivers to scan the grid or the utilization of advanced system devices such as ultrasonic tomography devices (e.g., MIRA). Measurement unit includes a matrix antenna array from transmitting and receiving transducer pairs [11]. In conditions where such devices are unavailable, Eyecon, A1220 Monolith, and similar conventional ultrasonic devices can also be used [3, 4]. Such types of devices, where a large number of receiver and transmitter sensors are combined, facilitate the use of the conventional philosophy of ultrasonic testing. They allow detecting the transmitted wave by the receiver located at only one point and transducers are electronically connected to act as a single transmitting and receiving transducer [3]. However, since the distance between the receiver and transmitter sensors is unconvertible in these types of equipment, the SAFT algorithm cannot be applied to these data directly. This is because the SAFT algorithm requires the transmitted wave to be detected by receivers located at many different points. For this reason, applying SAFT with signals obtained from a conventional ultrasonic device is one focus of this study. This paper introduces a novel approach by adapting SAFT for Conventional-Mode Ultrasonic data (CMU-SAFT). The innovation represents a significant advancement, opening new possibilities for concrete imaging by preventing hyperbolic patterns without the need for specialized equipment or elaborate scanning grids. The developed technique not only expands the applicability of SAFT but also introduces a more practical approach to ultrasonic imaging in concrete structures.
This study both demonstrates the effectiveness of CMU-SAFT and investigates the influences of various filters used for enhancing ultrasonic images on CMU-SAFT. Since one of the main challenges of elastic wave-based nondestructive testing techniques is to extract the original information from the signal obtained from these types of devices due to the presence of noise components [23], especially in nonhomogeneous materials, the signal loses its energy because of scattering. Additionally, grains in the material can generate echoes, commonly referred to as backscattering noise [24]. In addition, noise can also originate from electrical sources. To mitigate the impact of these various situations on the image and to enhance the visibility of defects, noise suppression filters are used. By estimating the signal shape in anticipation of flaw-related noise, optimal flaw echo detection can be achieved [25]. Denoising methods are mainly categorized into three types: time domain analysis, frequency domain analysis, and joint time–frequency analysis [26]. The selection of the most effective filter depends on the specific purpose and inspection conditions. Existing studies in the literature on the enhancement of ultrasonic images by using different filters show that the one commonly used filter for ultrasonic signals is band pass (BP), which eliminates the lower part of the received wideband echo spectrum [27]. Usage of BP filter extends from for detecting the damage of the CFRP–concrete interface [25] to integrity assessment of piles by extracting the mono-component over a frequency band [26]. One of the most other influential filtering technique is wavelet transform (WT), which bases on time–frequency joint analysis [28]. This filter’s applications are common for the signals propagating in grainy materials [24, 26, 29, 30]. It was seen that WT filtering technique is good in terms of overall noise reduction, but it resulted in loss of details of the defects producing a comparatively blurred image [31]. Chakraborty et al. [30] also point out that filtering of ultrasonic signals with WT algorithm caused results to show a match for detecting damage in a reinforced concrete structure. On the other hand, Zhao et al. [32] suggested a method using wavelet packet transform to extract the main frequency node of the signal and used it for identifying concrete hole defects. Both BP and WT have also been used in deep convolution neural network research to classify signals extracting their various features for classification [33]. Wiener filter is also appropriate for structural damage detection in reinforced concrete slabs and successful results have been achieved [34]. Wiener filtering operates on the spectral differences between the two distinct signal contributions [35] and able to minimize the mean square error of the regularized image. Moreover, Wang et al. [36] used a polynomial smoothing Savitzky–Golay (SG) filter for improvement of ultrasonic signals. However, Khan et al. [37] used SG to eliminate noise for the automatic detection of water in concrete slabs and found this filter to be suitable for lower level of noise.
As seen, it is evident that these filters, which have limited applications on concrete, exhibit superiority over each other from different aspects. For this reason, assessing whether they can compensate each other's shortcomings has become a question. However, these studies did not unveil any findings regarding the comparative effectiveness of the above-mentioned filters and their combinations in detecting defects at various depths in concrete. Moreover, they did not investigate the impact of these filters on SAFT results obtained from conventional-mode devices. Within this scope, this paper also aimed to enhance the ultrasonic monitoring concrete by revealing effectiveness of these signal–noise suppression filters with different combinations. Therefore, a comprehensive evaluation was conducted employing both the CMU-SAFT algorithm and statistical performance indicators to assess the most effective filter combinations and performance indicators for visualizing defects at various depths within the concrete structure.
CMU-SAFT algorithm was utilized to the ultrasonic signals obtained with A1220 Monolith device from a concrete block containing artificial delamination damages at various depths. Subsequently, noise suppression was implemented using band pass, wavelet transform, Wiener, and Savitzky–Golay filters, along with their combinations. CMU-SAFT images were constructed for all eleven filter combinations, and their performances were quantitatively assessed using the most common metrics that performed in independent studies for years [38, 39]: signal-to-noise ratio (SNR), signal-to-noise and distortion ratio (SINAD), total harmonic distortion (THD), root mean square (RMS), and mean absolute error (MAE). The evaluations also included cross-correlation (CC).
2 Denoising Procedure
Signals were denoised in MATLAB using four different filters (band pass (BP), wavelet transform (WT), Wiener (WI) and Savitzky–Golay (SG)), and eleven combinations of these filters as their abbreviations are given in Table 1.
2.1 Bandpass Filter
BP filter-based denoising of the signals was conducted by zero-phase digital filtering using “filtfilt” function of MATLAB [40]. The process begins by filtering the input data in the forward direction, followed by the reversal of the filtered sequence as it runs back through the filter. The filter used in this study was designed with a stop band frequency of 1 kHz, passband frequencies of 2 kHz and 60 kHz, and sampling frequency of 100 kHz.
2.2 Wavelet Transform
The WT of the received signal x(t) is:
where Wa,b is the wavelet transformation of x(t), t is time, a and b are the dilation and location parameters, respectively; γ*(t) is the complex conjugate of the wavelet function. In this study, WT of the received signals was implemented using the “wdenoise” function in MATLAB which is based on an empirical Bayesian method with a Cauchy prior [41]. This function applies wavelet decomposition to the signal and provides the original and denoised wavelet coefficients as well as scaling coefficients in order of decreasing resolution [42]. Denoising was performed using the “db3” wavelet, a three-level wavelet decomposition, and soft fixed form thresholding. To deal with the non-white noise, a level-dependent noise size estimation was employed [43].
2.3 Wiener Filter
In Wiener noise filtering, Unlike most other filters, the noisy signal x(n) is compared to an estimation of the noise-reduced signal d(n). Impulse response of the filter and resulting noise-reduced signal are represented by W(n) and y(n), respectively. On the other hand, the error of the filter e(n) is used to evaluate the filter’s performance. For a finite impulse response (FIR) system of length M, e(n) is [42, 43]:
The signals were denoised using [44]’s Wiener filter.
2.4 Savitzky–Golay Filter
The SG filter, characterized as a low-pass filter, is defined as a weighted moving average with weighting given as a polynomial of specific degree [45,46,47]. In this filter, a polynomial P of degree k is fitted using equation below:
where Nr and Nl are signal points in the right and in the left of a current signal point, respectively, while N describes frame size. SG filtered signals were obtained using “sgolay” command of MATLAB, which needs to input polynomial order and frame length [40]. After testings, optimal polynomial order and frame length were set as 9 and 21, respectively.
3 Experimental Study
3.1 Concrete Test Specimen
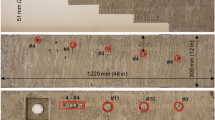
A concrete block specimen, in 13.5 m long, 0.8 m wide, and 0.5 m thick, was designed containing three artificial defects simulating delamination damage. The selection of this type was based on its representation of the most frequently encountered defects. The placements of the defects in the concrete block before casting and the geometrical details of the specimen are illustrated in Fig. 1. All defects were fabricated from expanded polystyrene material and were square with a side length of 20 cm.

Layout of the concrete test specimen and artificial defects
Firstly, a wooden mold was produced and defects were placed at different depths in the specimen (Fig. 2a). After concrete (cylinder compressive strength of 25 MPa and W/C:0.65) was poured into the mold, as its mix design is given in Table 2, it was compacted with vibrator. Concrete was poured carefully so that the artificial defects do not deviate from desired locations. After concrete pouring, it was cured in the standard condition (20 ± 2 °C and 95% relative humidity) for 28 days. Test specimen before casting and after setting is presented in Fig. 2b.

a Artificial delamination defects in the test specimen, b concrete block after setting, c A1220 MONOLITH low-frequency ultrasonic flaw detector, d display of an A scan
3.2 Data Acquisition
The ultrasonic test device used is the low-frequency ultrasonic flaw detector A1220 MONOLITH produced by acoustic control systems (Fig. 2c). The device consists of an electronic unit with a screen, a keyboard and a matrix antenna array with 6 × 4 dry-point contact elements. While 12 probes on one side of the device are transmitters, the remaining 12 are receivers. The average of the data is taken, and all of the elements have an independent spring load to test uneven surfaces. The conventional signal display form of the A1220 MONOLITH device, A-scan form, was used for ultrasonic measurements. In the Review Mode shown in Fig. 2d, time interval between two signals or between the pulse and the signal, distance measurement to the reflector and signal amplitude were measured.
3.3 Development of CMU-SAFT Algorithm
This innovation allows generation of multi-cross images for traditional single-point measurements by bridging the gap between these signals and SAFT originally designed for matrix antenna array-equipped devices. CMU-SAFT algorithm was based on stacking SAFT image slices of each single signals. To collect single-point data to be used for development of CMU-SAFT, upper surface of the concrete block specimen was divided into grids with 2.5-cm intervals (Fig. 3a). In the measurements, propagation velocity of the S wave was set as 2438 m/s, the frequency range was 40 kHz, and the maximum voltage was 200 V. Ultrasonic measurements were taken from 43 points from the sound (S) and defected (D) rows of the gridded surface. The data were recorded into the device, and the waveforms collected from each points were extracted and transferred to the computer (Fig. 3b). The SAFT algorithm was extended in accordance with the conventional-mode ultrasonic data (CMU-SAFT) to convert the received A-scan forms into images, and the CMU-SAFT technique was applied to the measurement taken from each point. CMU-SAFT has been constructed through the following stages: Firstly, SAFT algorithm [1] is applied on each single signal pairs and slice-type images were created. Then, a primary image is obtained by stacking them side by side. Finally, throughout this primary image, individual slices are interpolated to improve the resolution by creating smoother transitions and enhancing the overall clarity of the visual representation of CMU-SAFT image (Fig. 3c).

Stages of (a) scanning, b extracting data and c imaging algorithm of CMU-SAFT technique for conventional-mode ultrasonic data
Single-point measurements were taken at 25-mm intervals, and total 35 signals were recorded for each S and D rows. These signals were paired with their successor signals, and SAFT procedure was applied to each signal pair, resulting 34 SAFT image slices. The acquired SAFT images were stacked side by side to form a draft image. To increase the resolution of the draft image, interpolation was applied using 0.1-mm intervals and final CMU-SAFT images were constructed. This procedure was applied to total 420 signals and 408 signal pairs, comprising 12 sets of both filtered and unfiltered signals, yielding 12 CMU-SAFT images as presented in the next section.
4 Results and Discussion
Evaluation of nonfiltered and filtered signals encompassed three ways: Initially, A-scan waveforms, where reflections in a conventional ultrasonic A-scan representation, as illustrated in Fig. 3b, were interpreted. Subsequently, CMU-SAFT images obtained using these signals were evaluated and optimal filters for enhanced resolution in sound and varying-depth defect zones were revealed. Ultimately, the most effective performance indices were selected by evaluating both CMU-SAFT images and statistical performance indicators.
4.1 Effects of Denoising on the Waveforms
Figure 4 shows effects of different filters on ultrasonic signals reflecting from sound and detected zones. Clearly, the absence of filtering presents signals in a non-smooth form due to inherent noise. Specifically focusing on the defected zone D, it becomes apparent that the amplitude of surface reflections of D1 and D3 exceeds that of the corresponding defect reflections. The absence of backwall reflection can be attributed to the scattering and attenuation of transmitted waves as they traverse the surface and the defect before reaching the backwall.

Effects of non-combined filters on waveforms obtained from different zones
On the other hand, surface and defect reflections were observed by filter F1 with larger amplitudes compared to the unfiltered condition. However, noise softening was not fully achieved with this filter. Conversely, with filter F2, the surface reflection exhibited a resemblance to the unfiltered case, while achieving higher amplitudes in comparison with the F1 filter. Evaluating the defect reflections of F2, larger amplitudes were observed than the unfiltered waveforms. Furthermore, F2 demonstrated better performance over F1 in terms of noise smoothing. Otherwise, significantly lower amplitudes were observed with F3 in the surface reflection, and a distinct peak amplitude was not achieved in the defect reflection. However, compared to other filters, extremely softer waveforms were emerged with F3. The amplitude values of the surface reflection decreased in the F4 filter, whereas higher amplitudes were observed in F1 and F2.
Conclusively, F2 revealed notably higher amplitude values for the surface reflection of the deepest defect, while F3 presented the most effective outcomes in noise reduction. However, for the defect reflections, F1 and F2 gave the largest amplitudes, facilitating clear defect identification. Considering all these situations, F3-Wiener filter emerges as the most effective in noise reducing; however, since this significant reduction in amplitude values in critical regions will affect the color scale in the images, SAFT images were also evaluated in the next section.
4.2 Effects of Denoising on CMU-SAFT Images
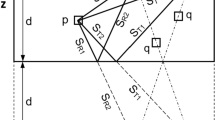
In this section, B-scan cross-section images generated by employing the CMU-SAFT procedure on both nonfiltered and filtered signals were evaluated. Figure 5 illustrates the locations of the defects and the backwall reflection in an unfiltered SAFT image. As seen, the application of CMU-SAFT, developed for single-point measurement data collected by a conventional-mode device, allows the cross-sectional image that is free from hyperbolic patterns.

Schematic representation of defects and geometric details of the specimen on a CMU-SAFT image
4.2.1 Sound Zone (S)
Figure 6 shows the B-scan CMU-SAFT images before and after filtering obtained from the sound row S. Here, the obscured visibility of the backwall reflection can be attributed to imperfections on the surface of the concrete block resulting from manufacturing defects. As seen, while WT (F2) blurred the backwall reflection, WI (F3) successfully eliminated noise in other regions and sharpened the backwall reflection, causing discontinuity. However, F1 highlighted the backwall reflection sharper and with higher amplitude scale than the unfiltered state, reducing the discontinuity seen with F3. However, this filter although eliminating the surface reflection in uneven areas, exhibited similar shadows in the deep regions. SG (F4), on the other hand, provided higher amplitudes for the backwall reflection, especially in areas with uneven surfaces. Considering filter combinations, although WI disrupted continuity but could yield a dominant back reflection without BP. Adding WT to BP reduced image quality (F5), but combining BP with SG (F7) maintained BP's performance. On the other hand, combining WT and WI (F8) resembled WI's behavior, but adding other filters (F11, F14, F15) did not enhance the image and even worsened it with shadows. BP with WI (F6) performed worse than WT (F8), and adding WT (F11, F15) did not eliminate shadows. SG with other filters showed no significant change (e.g., F5 vs. F12, F6 vs. F13, F11 vs. F15), indicating SG's minimal effect on back reflection. While using only BP determined back reflection length, WT achieved both back reflection length and noise elimination. Although WI excelled in noise elimination and highlighting back reflection, it fell short in determining back reflection length. In combinations, SG with WT (F9) performed better, while SG with BP (F7) performed worse than F1.

CMU-SAFT B-scan images of the sound region in nonfiltered and filtered states
In this case, BP is not recommended in rough surface environments due to potential shading issues. SG is the most effective in revealing the backwall reflection, which may not be visible in the unfiltered condition, while WI is the most successful in clarifying the backwall reflection in a smooth surface environment. On the other hand, WT is the best in determining the backwall length. Leveraging the backwall length obtained from WT, the combination of WT + SG can yield higher amplitude values. Although these two filters work well individually, it is advisable to avoid the WI + WT combination due to its tendency to produce blurred images with lower amplitudes. In cases where the backwall reflection does not change the length much, WI alone is sufficient.
The evaluation of CMU-SAFT image performances incorporated a comprehensive analysis through statistical performance indicators. Figure 7 presents the average and standard deviation values of these performance indicators, calculated across all signals. Standard deviation of higher values did not given (CC). The values were colored scale-dependent considering the expected noise suppression changes. The color scheme designates green for optimal behavior after filtering and pink for the worsts. In this context, initially signal-to-noise ratio (SNR) and signal-to-noise and distortion ratio (SINAD), metrics quantifying the ratio of signal power to noise power were interpreted [24, 26, 48,49,50,51,52].

Summary of performance indices for different signal noise suppression filters
The unfiltered signals exhibit a notably low average SNR of 0.04 dB, indicating significant noise interference suppressing signal power. The objective of filtering is to enhance SNR and SINAD values. Consequently, all filters led to increased mean SNR values in the signals. WI provided the highest SNR among the individual filters, while BP + WT + WI achieved the highest SNR among filter combinations. For combinations of WI with WT and SG, all maintaining an SNR above 55 dB. WI excelled in eliminating background noise, but it reduced defect amplitude and caused discontinuities in backwall detection; thus, SINAD value is also evaluated.
Figure 8 presents SNR vs. SINAD variation (Fig. 8a and b). While SNR values are highest in WI combinations, the SINAD values of particularly F8, F11, and F14, do not fall within acceptable ranges (they were highlighted with red circles). These filters, when used with WI and WT, result in blurring in areas without defects and an increase in backwall discontinuity. Hence, it is advisable to use WI alone instead of combining it with WT. However, it's evident from the SNR and SINAD values that WT did not diminish blurring as effectively as desired. In all WT combinations, these indicators are at their lowest values (F2, F5, F9, F12). Only using WT and WI together slightly improves these values.

Mean SNR and SINAD values of the signals for nonfiltered state and different filter applications (black circle: compatible value, red circle: incompatible value with CMU-SAFT image)
BP can enhance the ground reflection with a sharper and higher amplitude scale compared to the unfiltered state, reducing discontinuity. Notably, the most suitable indicator supporting BP (F1) and BP + SG (F7) images, perceived to provide the best image, is Total Harmonic Distortion (THD). THD measures the harmonic distortion of a signal and is defined as the ratio of the sum of the powers of all harmonic components to the power of the fundamental frequency [50]. For this reason, it is not directly influenced by the amplitude and power of noise unlike SNR and SINAD, but provides a frequency-dependent distortion measure. Thus, lower THD values indicate more efficient filtering. As seen those of F1 and F7 are the lowest. In the noise-signal ratio indicators, it is seen that the SINAD is less misleading than the SNR. Because while the SNR values of these filters were on the blue scale, SINAD values were shifted to the green which represents the better image.
One of the evaluated indicators in this study is the mean absolute error (MAE), a measure of errors between paired observations expressing the same phenomenon. Unlike the indices mentioned earlier, MAE considers the signal form and this feature makes this index as a robust decision mechanism for assessing filtering performances. Since the signals used in the study are not simulated ant their pure forms are not known, evaluation with pure signals is not feasible. However, the MAE, representing the average absolute error between the noisy signal, was used as an indicator to compare the efficiency of filtering methods. On the other hand, cross-correlation (CC) serves as the opposite of MAE in defining similarity with noisy signal. The effect of filtering is effective as the CC decreases. Root Mean Square (RMS) and Mean Squared Ratio (MSR) signify the square root of the ratio between the quadratic sum of the difference between observations and true values and the number of observations. These are sensitive to the large or small errors in a set of measurements, which can well reflect the measurement precision [49]. Low values of RMS and MSR suggest good efficiency of the filter. However, among RMS, MSR, MAE and CC indicators, the optimal results were achieved with filters with WI. However, the use of WI is not recommended in narrow-scan areas considering the aforementioned reasons. In wide-scan areas, RMS, MSR, MAE and CC indicators are effective in evaluating filter performances.
As a result, the most effective filter in eliminating the background noise is Wiener if there is a sufficient large area to determine the backwall depth, which is evident even with the SNR. However, in scenarios where a sufficiently wide scanning region is unavailable and thickness measurements are restricted to a narrower region, Wiener is not recommended because it causes interruptions in backwall monitoring. In such cases, SNR, RMS, MSR, MAE, and CC performance indices may yield misleading results by disproportionately emphasizing Wiener and its combinations, rendering them ineffective in depth detection. In such circumstances, SINAD and THD should be considered, and the combined use of BP and SG filters demonstrates greater success.
4.2.2 Defected Zone (D)
Unified assessment of varied depth defects: Figure 9 shows CMU-SAFT B-scan images of the ultrasonic measurements taken from section D, encompassing all defects. In all images, backwall reflections were shadowed. The effectiveness of filters was evaluated based on the depth of the defect. BP (F1) reduced the visibility of defects compared to the unfiltered state but increased discontinuity. WT (F2) sharpened the back wall reflection, particularly reducing background noise on the right side. WI (F3) enhanced the visibility of defects by reducing noise in other areas, notably clarifying the D3 surface defect not commonly found in the literature. SG (F4) presented defects with less sharpness by narrowing the color scale. On the other hand, shadowing effects increased in BP-added combinations. When BP, WT, and WI were combined, defects became blurred, and even D2 became almost undetectable. The best results were achieved with the WT + WI and WT + WI + SG combinations. Combining WT and SG did not reduce noise, blurred D2 and D3 defects, and made the deepest defects and backwall reflections more visible.

CMU-SAFT B-scan images of the defected region in nonfiltered and filtered states
While all filters increased the SNRs of the signals in the defected zone (D), Wiener, which was the best in visualization, gave the highest SNR values. This is followed by combinations of WI with WT and SG. In all other combinations of WI, the SNR is above 64 dB. The cause of this phenomenon is that the WI filter leads in eliminating background noise. Nevertheless, while the aim here was to highlight the defect by eliminating the background noise, WI was much more successful in highlighting all the defects located at different depths compared to the backwall reflection. While the combination of BP and WI slightly decreased the SNR, the combination with WT increased it. The combination of SG with WI has also a higher SNR. As can be seen from the graph showing the SNR vs SINAD change, although the SNR values are the highest in the combinations with WI, the SINAD values in F6, F8, F11 and F13 are not in green values. SINAD values are also highest in F3 (WI) and F10 (SG + WI). For this reason, WI filter is recommended alone or with SG. The filters with the lowest THD indicators are F2 (BP) and F7 (BP + SG). Here, it is seen that SNR is misleading and it is low in these filters, while SINADs are high. For this reason, it is seen that SINAD gives more accurate information than SNR in noise-signal ratio indicators. Because while the SNR values of these filters are on the blue scale, the SINAD values have shifted to the greener scale. The lower MSR and RMS indicators further indicate the effectiveness of the filter. The indices showing the success of the F3 and F10 filters, which were successful especially in eliminating background noise and not causing shadowing, and in clearly highlighting the shallow D3 defect, which is not frequently encountered in the literature, were the RMS and MSR indices. This shows that these indices are more reliable by giving mean values compatible with the image. Looking at the green scales of the MAE and CC indices, it is thought that F11, F13 and F15 are more effective. However, when looking at the images, this filter both caused shadows on the right side of the section and deteriorated the clarity by reducing the amplitude scale even at midlevel depth defect. Hence, it can be concluded that MAE and CC are inadequate in this context. In conclusion, the WI + SG combination stands out as the most effective filter for detecting shallow defects. Indicators that align with images to support this scenario include SINAD, RMS, and MSR. While highlighting the shallow defect, these filters were able to show the same performance in midlevel depth and deepest defects. The most ineffective filters in detecting midlevel depth defects are F11, F13, F15 and due to the success in other regions, no indicators except SINAD were able to predict correctly. The reason for this is that signals from other defects added to average show these indices more effective than the real value. For this reason, each defect has also been evaluated individually (Fig. 8c, d and e).
Individual assessment of varied depth defects: As seen in the performance indices (Fig. 7) and Fig. 8c, the F3 and F10 filters yielded the best results for the deepest defect D1. Unlike the unified assessment, RMS and MSR did not demonstrate the success here as they displayed various combinations on the green scale, apart from F3 and F11. On the other hand, MAE and CC indices were consistent with the images (F11, F13, F14, F15). For defect D2, F7 and F13 filters with BP + SG combinations delivered optimal results. However, this situation was not reflected on the images. In contrast to successful predictions of SINAD and THD in the unified assessment, RMS and MSR indices exhibited more successful results for combinations of Wiener. Nevertheless, MAE and CC indices did not align with the images in this assessment (Fig. 8d). Finally, the shallowest defect D3 was clearly identified in CMU-SAFT images which is not frequently encountered in the literature. Particularly the Wiener filter contributed to this clarity. Although combinations of Wiener filters with others enhanced defect visibility, background noise overshadowed the image. This success is notably highlighted in the SNR vs. SINAD relation (Fig. 8e) and RMS and MSR indices. However, MAE and CC indices did not demonstrate compatibility with the images in this evaluation.
5 Conclusions
This paper introduces a novel CMU-SAFT approach to enable SAFT technique for conventional ultrasonic measurements without the need for specialized equipment. The innovation enhances the versatility of SAFT, enabling its use in scenarios where matrix antenna array-equipped devices may not be available or practical and preventing hyperbolic patterns. While the results obtained from a concrete containing delamination defects at various depths have demonstrated the effectiveness of the CMU-SAFT technique with conventional-mode devices, particularly in imaging the shallow defect that is not commonly encountered in the literature, the study also quantitatively assessed the contributions of different denoising filters on CMU-SAFT images with statistical performance indices.
The findings of the study reveal insightful conclusions regarding the effectiveness of different filters. The examination of waveforms and CMU-SAFT images post-filtering underscores the limitations of the band pass filter, emphasizing the superior noise reduction capabilities of the wavelet filter, particularly in smoothing out noise and enhancing backwall reflection. Wiener emerges as the top performer in noise elimination, presenting exceptionally smooth waveforms. Considering surface conditions, band pass proving inadequate in rough surfaces but Wavelet excelling in smooth surface environments. The efficacy of Wiener for visualizing deep and midlevel defects is highlighted, but cautioning against Wiener in narrow regions due to potential backwall interruptions. Wavelet demonstrates superior performance in determining backwall length. It emphasizes the importance of nuanced evaluations for different depth defects, as averaging performance indicators may lead to misinterpretations. SINAD has been shown to be superior to SNR in accurately evaluating the noise signal ratio. SINAD and THD are more successful for performance assessment in narrow regions. Performances of MAE, CC, RMS, and MSR are affected by the depth of the defect and the width of the examined region. Consequently, CMU-SAFT technique can lead to overcome existing technological limitations, making it more economical, broader applicability and preventing the need for specialized equipment by utilizing recommended filters and indicators under specific conditions.
References
Schickert, M.; Krause, M.; Müller, W.: Ultrasonic imaging of concrete elements using reconstruction by synthetic aperture focusing technique. J. Mater. Civ. Eng. 15, 235–246 (2003)
Lin, S.; Shams, S.; Choi, H.; Azari, H.: Ultrasonic imaging of multi-layer concrete structures. NDT&E Int. 98, 101–109 (2018)
Chen, R.; Tran, K.T.; La, H.M.; Rawlinson, T.; Dinh, K.: Detection of delamination and rebar debonding in concrete structures with ultrasonic SH-waveform tomography. Autom. Constr.. Constr. 133, 104004 (2022)
De La Haza, A.; Samokrutov, A.A.; Samokrutov, P.A.: Assessment of concrete structures using the Mira and Eyecon ultrasonic shear wave devices and the SAFT-C image reconstruction technique. Constr. Build. Mater. 38, 1276–1291 (2013)
Beniwal, S.; Ganguli, A.: Defect detection around rebars in concrete using focused ultrasound and reverse time migration. Ultrasonics 62, 112–125 (2015)
Hoegh, K.; Khazanovich, L.: Extended synthetic aperture focusing technique for ultrasonic imaging of concrete. NDT & E Int. 74, 33–42 (2015)
Li, Z.-W.; Zhu, W.-F.; Meng, X.-Z.; Fan, G.-P.; He, Y.-L.: Multi-layer imaging method for void defects in ballastless track using forward ray tracing with SAFT. Measurement 173, 108532 (2021)
Kou, X.; Pei, C.; Liu, T.; Wu, S.; Liu, T.; Chen, Z.: Noncontact testing and imaging of internal defects with a new Laser-ultrasonic SAFT method. Appl. Acoust.Acoust. 178, 107956 (2021)
Schickert, M.: Progress in ultrasonic imaging of concrete. Mater. Struct.Struct. 38, 807–815 (2005)
Schickert, M.; Krause, M.; Müller, W.: Ultrasonic imaging of concrete elements using reconstruction by synthetic aperture focusing technique. J. Mater. Civ. Eng. 235–246 (2003).
Hoegh, K.; Khazanovich, L.; Yu, H.T.: Ultrasonic Tomography Technique For Evaluation Concrete Pavements. Transp. Res. Board 88th Ann. Meeting, 23–27 Jan. (2011).
Ghosh, D.; Kumar, R.; Ganguli, A.; Mukherjee, A.: Nondestructive evaluation of Rebar corrosion-induced damage in concrete through ultrasonic imaging. J. Mater. Civ. Eng. 32, 04020294–04020294 (2020)
Kuchipudi, S.T.; Pudovikov, S.; Wiggenhauser, H.; Ghosh, D.; Rabe, U.: Imaging of vertical surface-breaking cracks in concrete members using ultrasonic shear wave tomography. Sci. Rep. 21744 (2023).
Tayfur, S.; Alver, N.: Imaging of voids in concrete by impact-echo and ultrasonicecho methods. J. Fac. Eng. Archit. Gazi Univ. 167–176, 1 (2018)
Hu, H.; Xu, Y.; Li, S.; Lu, H.: Detection of defect in ballastless track based on impact echo method combined with improved SAFT algorithm. Eng. Struct.Struct. 269, 114779 (2022)
Dinh, K.; Tran, K.; Gucunski, N.; Ferraro, C.C.; Nguyen, T.: Imaging concrete structures with ultrasonic shear waves-technology development and demonstration of capabilities. Infrastructures 8(3) (2023).
Słoński, M.; Schabowicz, K.; Krawczyk, E.: Detection of flaws in concrete using ultrasonic tomography and convolutional neural networks. Materials 13(7), 1557 (2020)
Andrushia, A.D.; A, N.; Lubloy, E.; PA, G.: Deep learning based thermal crack detection on structural concrete exposed to elevated temperature. Adv. Struct. Eng.Struct. Eng. 24(9), 1896–1909 (2021)
Cantero-Chinchilla, S.; Wilcox, P.D.; Croxford, A.J.: Deep learning in automated ultrasonic NDE—developments, axioms and opportunities. NDT&E Int. 131, 102703 (2022)
Guzmán-Torres, J.A.; Naser, M.Z.; Domínguez-Mota, F.J.: Effective medium crack classification on laboratory concrete specimens via competitive machine learning. Structures 37, 858–870 (2022)
Mayakuntla, P.K.; Ganguli, A.; Smyl, D.: Gaussian mixture model-based classification of corrosion severity in concrete structures using ultrasonic imaging. J. Nondestruct. Eval.Nondestruct. Eval. 42, 28 (2023)
Wu, Y.; Wang, Y.; Li, D.; Zhang, J.: Two-step detection of concrete internal condition using array ultrasound and deep learning. NDT&E Int. 139, 102945 (2023)
Figlus, T.; Gnap, J.; Skrucany, T.; Sarkan, B.; Stoklosa, J.: The use of denoising and analysis of the acoustic signal entropy in diagnosing engine valve clearance. Entropy 18, 253 (2016)
Matz, V.; Smid, R.; Starman, S.; Kreidl, M.: Signal-to-noise ratio enhancement based on wavelet filtering in ultrasonic testing. Ultrasonics 49(8), 752–759 (2009)
Abbate, A.; Koay, J.; Frankel, J.; Schroeder, S.C.; Das, P.: Signal detection and noise suppression using a wavelet transform signal processor: application to ultrasonic flaw detection. IEEE Trans. Ultrason. Ferroelectr. Freq. ControlUltrason. Ferroelectr. Freq. Control 44(1), 14–26 (1997)
Xu, J.; Wang, Z.; Tan, C.; Si, L.; Liu, X.: A novel denoising method for an acoustic-based system through empirical mode decomposition and an improved fruit fly optimization algorithm. Appl. Sci. 7(3), 215 (2017)
Rashmi, M.; Nihat, B.; Jarar, S.: Application of Bandpass Filtering in Ultrasonic Non-Destructive Testing. Iowa State Univ. (1989).
Liu, J.-L.; Wang, S.F.; Zheng, J.-Y.; Chang, C.-M.; Wei, X.-J.; Ren, W.-X.: Time-frequency signal processing for integrity assessment and damage localization of concrete piles. Int. J. Struct. Stab. Dyn.Struct. Stab. Dyn. 20(2), 2050020 (2020)
Tokmakci, M.; Erdogan, N.: Denoising of arterial and venous Doppler signals using discrete wavelet transform: effect on clinical parameters. Contemp. Clin. TrialsClin. Trials 30, 192–200 (2009)
Chakraborty, J.; Wang, X.; Stolinski, M.: Damage detection in multiple RC structures based on embedded ultrasonic sensors and wavelet transform. Buildings 11(2), 56 (2021)
Chukwujekwu Okafor, A.; Dutta, A.: Non-destructive evaluation of concrete with ultrasonic C-scan and digital image enhancement techniques. AIP Conf. Proc. 1581, 925 (2015)
Zhao, J.; Hu, T.; Zheng, R.; Ba, P.; Mei, C.; Zhang, Q.: Defect recognition in concrete ultrasonic detection based on wavelet packet transform and stochastic configuration networks. IEEE Access (2021).
Jayasudha, J.C.; Lalithakumari, S.: Phased array ultrasonic test signal enhancement and classification using empirical wavelet transform and deep convolution neural network. Concurr. Eng.. Eng. 30(3), 229–236 (2022)
Baselice, F.; Ferraioli, G.; Ambrosanio, M.; Pascazio, V.; Schirinzi, G.: Enhanced Wiener filter for ultrasound image restoration. Comput. Methods Programs Biomed.. Methods Programs Biomed. 153, 71–81 (2018)
Neal, S.P.; Speckman, P.L.; Enright, M.A.: Flaw signature estimation in ultrasonic nondestructive evaluation using the Wiener filter with limited prior information. IEEE Trans. Ultrason. Ferroelectr. Freq. ControlUltrason. Ferroelectr. Freq. Control 40(4), 347–353 (1993)
Wang, X.; Chakraborty, J.; Niederleithinger, E.: Noise reduction for improvement of ultrasonic monitoring using coda wave interferometry on a real bridge. J. Nondestruct. Eval.Nondestruct. Eval. 40, 14 (2021)
Khan, M.A.; Vehmas, R.; Visa, A.: Automatic detection of water inside concrete slabs using ground penetrating radar. In: 2019 IEEE Radar Conf. (2019).
Botchkarev, A.: A new typology design of performance metrics to measure errors in machine learning regression algorithms. Interdiscp. J. Inf. Knowl. Manag. 14, 45–79 (2019)
Naser, M.S.; Alavi, A.H.: Error metrics and performance fitness indicators for artificial intelligence and machine learning in engineering and sciences. Archit. Struct. Constr. 3, 499–517 (2023)
MATLAB, R2018b. MathWorks.
Janeliukstis, R.: Continuous wavelet transform-based method for enhancing estimation of wind turbine blade natural frequencies and damping for machine learning purposes. Measurement 172, 108897 (2021)
Wiener, N.: The Interpolation, Extrapolation and Smoothing of Stationary Time Series. Rep. Serv. 19, Res. Project DIC-6037 MIT (1942).
Jayawardhana, M.; Zhu, X.; Liyanapathirana, R.: Damage detection of reinforced concrete structures based on the Wiener filter. Aust. J. Struct. Eng. 14 (2013).
Chen, Y.-W.: Noise Reduction by Wiener Filter. GitHub (2022)
Savitzky, A.; Golay, M.J.E.: Smoothing and differentiation of data by simplified least squares procedures. Anal. Chem. 36, 1627–1639 (1964)
Hassanpour, H.: A time–frequency approach for noise reduction. Digit Signal Process. 18, 728–738 (2008)
Azami, H.; Mohammadi, K.; Bozorgtabar, B.: An improved signal segmentation using moving average and Savitzky-Golay filter. J. Signal Inf. Process. 3 (2012).
Zhou, C.; Zhang, Y.: Particle filter based noise removal method for acoustic mission signals. Mech. Syst. Signal Process. 28, 63–77 (2012)
Sraitih, M.; Jabrane, Y.: A denoising performance comparison based on ECG signal decomposition and local means filtering. Biomed. Signal Process. Control 69, 102903 (2021)
Prajna, K.; Mukhopadhyay, C.K.: Fractional Fourier transform based adaptive filtering techniques for acoustic emission signal enhancement. J. Nondestruct. Eval.Nondestruct. Eval. 39, 14 (2020)
Cai, Y.; Yu, Z.; Mo, D.; Liu, R.; Chen, A.; Dai, B.; Li, Y.: Noise reduction with adaptive filtering scheme on interferometric fiber optic hydrophone. Optik. 211 (2020).
Sung, W.P.; Kao, J.C.M.; Chen, R.: Research on application of wavelet denoising method based on signal to noise ratio in the bench test. Appl. Mech. Mater. 457–458, 1156–1162 (2013)
Acknowledgements
The author acknowledges Dr. Ninel Alver for material supply and technical support.
Funding
Open access funding provided by the Scientific and Technological Research Council of Türkiye (TÜBİTAK).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The author has no conflict of interest.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Tayfur, S. Assessing the Influences of Noise Suppression Filters on Ultrasonic Concrete Images Generated by an Innovative CMU-SAFT Algorithm. Arab J Sci Eng (2024). https://doi.org/10.1007/s13369-024-09024-3
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s13369-024-09024-3