
Abstract
Consider an oriented curve \(\Gamma \) in a domain D in the plane \({\varvec{R}}^2\). Thinking of D as a piece of paper, one can make a curved folding in the Euclidean space \({\varvec{R}}^3\). This can be expressed as the image of an “origami map” \(\Phi :D\rightarrow {\varvec{R}}^3\) such that \(\Gamma \) is the singular set of \(\Phi \), the word “origami” coming from the Japanese term for paper folding. We call the singular set image \(C:=\Phi (\Gamma )\) the crease of \(\Phi \) and the singular set \(\Gamma \) the crease pattern of \(\Phi \). We are interested in the number of origami maps whose creases and crease patterns are C and \(\Gamma \), respectively. Two such possibilities have been known. In the authors’ previous work, two other new possibilities and an explicit example with four such non-congruent distinct curved foldings were established. In this paper, we determine the possible values for the number N of congruence classes of curved foldings with the same crease and crease pattern. As a consequence, if C is a non-closed simple arc, then \(N=4\) if and only if both \(\Gamma \) and C do not admit any symmetries. On the other hand, when C is a closed curve, there are infinitely many distinct possibilities for curved foldings with the same crease and crease pattern, in general.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
The geometry of curved foldings is, nowadays, an important subject not only from the viewpoint of mathematics but also from the viewpoint of engineering. Works on this topic have been published by numerous authors; for example, (Demaine et al. 2015, 2018; Duncan and Duncan 1982; Fuchs and Tabachnikov 1999; Huffman 1976; Kilian et al. 2008) and (Fuchs and Tabachnikov 2007, Lecture 15) are fundamental references.
Drawing a curve \(\Gamma \) in \({\varvec{R}}^2\), we think of a tubular neighborhood of \(\Gamma \) as a piece of paper. Then we can fold this along \(\Gamma \), and obtain a curved folding in the Euclidean space \({\varvec{R}}^3\), which is a developable surface (as a subset of \({\varvec{R}}^3\)) whose singular set image is a space curve \(C\,(\subset {\varvec{R}}^3)\). In this paper, we fix an orientation of C and denote by \(-C\) the image of the same curve with the opposite orientation. We denote by |C| without considering its orientation.

A given crease pattern \(\Gamma \) (left) and its realization (right) as a curved folding along the crease C
In this paper, we focus on curved foldings which are produced from a single curve \(\Gamma \) in \({\varvec{R}}^2\) satisfying the following properties:
-
(i)
The length of \(\Gamma \) is equal to that of C (Fuchs and Tabachnikov 1999, Page 29 (5)). Moreover, the two curves have a bijective correspondence by an arc-length parametrization.
-
(ii)
The curvature functions of C and \(\Gamma \) have no zeros (Fuchs and Tabachnikov 1999, Page 29 (3)).
-
(iii)
The curves C and \(\Gamma \) have no self-intersections.
-
(iv)
The absolute value of the curvature function of \(\Gamma \) is less than the curvature function of C at each point of \(\Gamma \) (Fuchs and Tabachnikov 1999, Page 28 (1)).
If a curved folding satisfies (i)–(iii) and the following condition (stronger than (iv)), then it is said to be admissible (cf. (2.4) and also (2.10)).
- (iv\({}'\)):
-
The maximum of the absolute value of the curvature function of \(\Gamma \) is less than the minimum of the curvature function of C (Fuchs and Tabachnikov 1999, Page 28 (1)).
For a pair \((\Gamma ,|C|)\) giving a curved folding P, there is another possibility for corresponding curved foldings (see Fuchs and Tabachnikov 1999). Moreover, the authors’ previous work (Honda et al. 2020c), two additional possibilities were found when P is admissible, and an explicit example of four non-congruent curved foldings with the same crease and crease pattern was given. Here, two subsets A, B in \({\varvec{R}}^3\) are said to be congruent if there exists an isometry T in \({\varvec{R}}^3\) such that \(B=T(A)\). The purpose of this paper is to further develop the discussions in Honda et al. (2020c). In fact, we are interested in the number of congruence classes of curved foldings with a given pair of crease |C| and crease pattern \(\Gamma \). Since this number is closely related to the symmetries of \(|C|(\subset {\varvec{R}}^3)\) and \(\Gamma (\subset {\varvec{R}}^2)\), we give the following:
Definition 1.1
A subset A of the Euclidean space \({\varvec{R}}^k\) (\(k=2,3\)) is said to have a symmetry if \(T(A)=A\) holds for an isometry T of \({\varvec{R}}^k\) which is not the identity map, and T is called a symmetry of A. Moreover, if there is a point \({\mathbf {x}}\in A\) such that \(T({\mathbf {x}})\ne {\mathbf {x}}\), then A is said to have a non-trivial symmetry T. On the other hand, a symmetry T of A is called positive (resp. negative) if T is an orientation preserving (resp. reversing) isometry of \({\varvec{R}}^k\).
We denote by \({\mathcal {P}}(\Gamma ,|C|)\) (resp. \({\mathcal {P}}_*(\Gamma ,|C|)\)) the set of curved foldings (resp. the set of admissible curved foldings) whose creases and crease patterns are C and \(\Gamma \) satisfying (i)–(iv) (resp. (i)–(iii) and (iv\({}'\))), see (3.5) for the precise definition. We prove the following, which is a refinement of (Honda et al. 2020c, Theorems A and B):
Theorem A
Let C be the image of an embedded curve which is defined on a bounded closed interval. Then the number \(n_{C,\Gamma }^{}\) of the elements in \({\mathcal {P}}_*(\Gamma ,|C|)\) as subsets in \({\varvec{R}}^3\) is four if \(\Gamma \) has no symmetries. Otherwise, \(n_{C,\Gamma }^{}\) is equal to two.
Theorem B
Let C be the image of an embedded curve which is defined on a bounded closed interval. Then the number \(N_{C,\Gamma }^{}\) of the congruence classes of curved foldings in \({\mathcal {P}}_*(\Gamma ,|C|)\) is less than or equal to \(n_{C,\Gamma }^{}\) and satisfies the following:
-
(1)
if C has no symmetries and \(\Gamma \) also has no symmetries, then \(N_{C,\Gamma }^{}=4\),
-
(2)
if not the case in (1), then \(N_{C,\Gamma }^{}\le 2\) holds, and
-
(3)
\(N_{C,\Gamma }^{}=1\) if and only if
-
(a)
C lies in a plane and has a non-trivial symmetry,
-
(b)
C lies in a plane and \(\Gamma \) has a symmetry, or
-
(c)
C does not lie in any plane and has a positive symmetry, and \(\Gamma \) also has a symmetry.
-
(a)
In Honda et al. (2020c), an example of \({\mathcal {P}}_*(\Gamma ,|C|)\) consisting of four non-congruent subsets in \({\varvec{R}}^3\) was given by computing the mean curvature functions along C. However, this approach seems insufficient to prove Theorem B (see Proposition 5.12 in Sect. 5). So, in this paper, we will prepare several new techniques for its proof (see Sects. 3, 4 and 5).

A crease pattern (left) corresponding to a curved folding along a circle (right)
We next consider the case that
-
C is a knot (i.e. a simple closed curve) of length \(l(>0)\) in \({\varvec{R}}^3\) giving a crease of a curved folding \(P\in {\mathcal {P}}_*(\Gamma ,|C|)\), and
-
\(\Gamma \) is a curve of length l embedded in \({\varvec{R}}^2\) as a crease pattern.
Even when C is closed, \(\Gamma \) may not be a closed curve in general. In fact, if we consider the curved folding along the unit circle whose first angular function (see Sect. 2 for the definition) is \(\pi /4\) as in Fig. 2, then its crease pattern is the sector of the circle of radius \(\sqrt{2}\) whose length is \(2\pi \).
We return to the general setting. Let \(\gamma (s)\) be an arc-length parametrization of \(\Gamma \). If C is a closed curve of length l, then the curvature function \(\mu (s)\) of \(\gamma (s)\) can be extended as an l-periodic function \({\tilde{\mu }}(s)\) \((s\in {\varvec{R}})\). A curved folding \(P\in {\mathcal {P}}_*(C,\Gamma )\) consists of a union of two developable strips along C whose geodesic curvature functions coincide with \(\mu (s)\).
Theorem C
Let \({\mathbf {c}}:{\varvec{R}}\rightarrow {\varvec{R}}^3\) and \({\tilde{\gamma }}:{\varvec{R}}\rightarrow {\varvec{R}}^2\) be regular curves parametrized by arc-length such that
-
(1)
\({\mathbf {c}}(s)={\mathbf {c}}(s+l)\),
-
(2)
the curvature function \({\tilde{\mu }}:{\varvec{R}}\rightarrow {\varvec{R}}\) of \({\tilde{\gamma }}\) induces a function \(\mu :{\varvec{R}}/l{\varvec{Z}}\rightarrow {\varvec{R}}\) defined on the one dimensional torus \({\varvec{R}}/l{\varvec{Z}}\) satisfying
$$\begin{aligned} 0<\max _{w\in {\varvec{R}}/l{\varvec{Z}}} \mu (w)<\kappa (s) \qquad (s\in [0,l)), \end{aligned}$$where \(\kappa (s)\) is the curvature function of \({\mathbf {c}}(s)\).
We set \(C:={\mathbf {c}}([0,l])\) and \(\Gamma :=\gamma ([0,l])\). Then there exist four continuous families \( \{P^i_{{\mathbf {x}}}\}_{{\mathbf {x}}\in C} \) \((i=1,2,3,4)\) of curved foldings in \({\mathcal {P}}_*(\Gamma ,|C|)\) satisfying the following properties:
-
(a)
The set \({\mathcal {P}}_*(\Gamma ,|C|)\) coincides with the set \(\{P^i_{{\mathbf {x}}}\,;\, i\in \{1,2,3,4\},\,\, {\mathbf {x}}\in C\}\).
-
(b)
Suppose that C is not a circle and \(\Gamma \) is not a subset of a circle. Then, for each \(P^i_{{\mathbf {x}}}\) \((i\in \{1,2,3,4\},\,\, {\mathbf {x}}\in C)\), its congruence class
$$\begin{aligned} \Lambda ^i_{{\mathbf {x}}}:=\{Q\in {\mathcal {P}}_*(\Gamma ,|C|)\,;\, \text{ Q } \text{ is } \text{ congruent } \text{ to } P^i_{{\mathbf {x}}}\} \end{aligned}$$is finite. In particular, quotient of \({\mathcal {P}}_*(\Gamma ,|C|)\) by congruence relation \({\mathcal {P}}_*(\Gamma ,|C|)\) contains uncountably many curved foldings which are not congruent to each other.
-
(c)
Suppose that C and \(\mu \) have no symmetries (cf. Definition 3.3). Then for each \(i\in \{1,2,3,4\}\) and \({\mathbf {x}}\in C\), the set \(\Lambda ^i_{{\mathbf {x}}}\) consists of a single element, that is, any two curved foldings in \({\mathcal {P}}_*(\Gamma ,|C|)\) are mutually non-congruent.
In Theorem C, we do not need to assume that the crease pattern \(\Gamma \) is a closed curve in \({\varvec{R}}^2\). However, the most interesting case is that C and \(\Gamma \) are both closed: At the end of Sect. 6, we give a concrete example of a \({\mathcal {P}}_*(\Gamma ,|C|)\) containing uncountably many congruence classes.
Theorems A, B and C can be considered as the analogues for cuspidal edges along a space curve given in (Honda et al. 2020a, Theorems III and IV) and (Honda et al. 2020b, Theorem 1.8), respectively. However, even if \(\Gamma \) and C admit real analytic parametrizations, Theorems A, B and C do not directly follow from the corresponding assertions for cuspidal edges.
2 Preliminaries
We let C be the image of an embedded space curve whose length is l. When C is a non-closed curve, it has a parametrization \({\mathbf {c}}:{\mathbb {I}}_l\rightarrow {\varvec{R}}^3\) with arc-length parameter, where \({\mathbb {I}}_l:=[-l/2,l/2]\). On the other hand, if C is closed (i.e. a knot), then it can be parametrized by a curve \({\mathbf {c}}:{\mathbb {T}}^1_l\rightarrow {\varvec{R}}^3\) with arc-length parameter, where \({\mathbb {T}}^1_l:={\varvec{R}}/l{\varvec{Z}}\). Since we treat the bounded closed interval \({\mathbb {I}}_l\) and the one dimensional torus \({\mathbb {T}}^1_l\) at the same time, we set
As explained in the introduction, C has the orientation induced by the parametrization \({\mathbf {c}}\). We let \(-C\) be the curve C whose orientation is reversed, and |C| denotes the curve C ignoring its orientation. We consider special strips along C, which are “developable strips” along C. Let \(J_0\) be a set which is homeomorphic to J.
Definition 2.1
A developable strip along C is a \(C^\infty \)-embedding \(f:U\rightarrow {\varvec{R}}^3\) defined on a tubular neighborhood U of \(J_0\times \{0\}\) in \(J_0\times {\varvec{R}}\) such that
-
\(J_0 \ni u\mapsto f(u,0)\in {\varvec{R}}^3\) parametrizes C,
-
there exists a unit vector field \(\xi _f(u)\) of f along C (called a ruling vector field) such that f can be expressed as
$$\begin{aligned} f(u,v)=f(u,0)+v \xi _f(u)\qquad ((u,v)\in U),\,\, \text {and} \end{aligned}$$ -
the Gaussian curvature of f vanishes on U identically.
The developable strip f represents a map germ along C. We identify this induced map germ with f itself if it creates no confusion. Hereafter, we assume that the curvature function of C never vanishes, and we denote by \({\mathbf {e}}(u)\), \({\mathbf {n}}(u)\) and \({\mathbf {b}}(u)\) the unit tangent, unit principal normal and unit bi-normal vector fields associated with the parametrization
of C, respectively. With these notations, we can express \(\xi _f\) as
This \(\alpha _f:J_0\rightarrow {\varvec{R}}\) is called the first angular function, and \(\beta _f:J_0\rightarrow {\varvec{R}}\) is called the second angular function of f.
In this paper, we consider the developable strips satisfying
We denote by \({\mathcal {D}}(C)\) the set of developable strip germs along C satisfying (2.3). Moreover, \(f\in {\mathcal {D}}(C)\) is said to be admissible if it satisfies the following stronger condition
which corresponds to the condition (iv\({}'\)) in the introduction, where \(\kappa _f\) is the curvature function of \({\mathbf {c}}_f\) (cf. (2.1)). Let \({{\mathcal {D}}}_*(C)\) be the set of admissible developable strip germs along C. By definition,
holds. We set
By (2.3), we can choose the first angular function \(\alpha _f\) so that
The Gaussian curvature of f vanishes identically if and only if
which is equivalent to the formula
where \(\tau _f(u)\) is the torsion function of \({\mathbf {c}}_f(u)\). In particular, we may assume that
Throughout this paper, we assume (2.5) and (2.7) \(\underline{\hbox {for }f\in {\mathcal {D}}(C).}\) In particular, \(\xi _f(u)\) satisfies
Such a \(\xi _f\) is called the normalized ruling vector field of f. Then
gives the unit co-normal vector field of f along C satisfying \({\mathbf {N}}_f\cdot \xi _f>0\). We set
which is a positive-valued function giving the geodesic curvature of C as a curve on the surface f. We call \(\mu _f\) the geodesic curvature function of f along C. Since \(\mu _f(u)>0\), (2.5) and (2.4) reduce to the conditions
and
respectively. Let l be the total arc-length of C. Then the parameter u of \({\mathbf {c}}_f\) can be expressed as \(u=u(s)\) (\(s\in J\)) so that \({\mathbf {c}}(s):={\mathbf {c}}_f(u(s))\) (\(s\in J\)) gives the arc-length parametrization of C. In this situation, the function defined by
is called the normalized geodesic curvature function of f. We now fix a point
which is the midpoint of C if \(J={\mathbb {I}}_l\) and is an arbitrarily chosen point if \(J={\mathbb {T}}^1_l\).
Definition 2.2
Let \(f\in {\mathcal {D}}(C)\). We call f(s, v) a normal form of a developable strip if it is defined on a tubular neighborhood of \(J\times \{0\}\) in \({\varvec{R}}^2\) and
gives an arc-length parametrization of C. Since we will use s to denote the arc-length parameter of C, we use the parametrization f(s, v) when f is a normal form. (We shall denote such developable strips using capital letters to emphasize that they are written in normal forms.)
Suppose that F(s, v) is a normal form. As seen in Honda et al. (2020c), the restriction H(s) of the mean curvature function of F(s, v) to the curve \({\mathbf {c}}(s)\) (\(s\in J\)) satisfies
where \(\kappa (s)\) and \(\tau (s)\) are the curvature and torsion function of \({\mathbf {c}}(s)\). By (2.5), the right-hand side of (2.13) never vanishes. In particular, F has no umbilics and the ruling direction \(\xi _{F}(s):=F_v(s,0)\) along C points in the (uniquely determined) asymptotic direction of F. Hence, the germ of the normal form of F is determined by the base point \({\mathbf {x}}_0\in C\) and the first angular function \(\alpha _{F}\).
From now on, we again assume that u is a general parameter, that is, it may not be an arc-length parameter of C, in general. Let \(J_0\) be a set which is homeomorphic to J. We let
be the set of \(C^\infty \)-functions defined on \(J_0\) whose images lie in the set \( (-\pi /2,\pi /2)\setminus \{0\}. \) Then the first angular function \(\alpha _f(u)\) of a developable stripFootnote 1f(u, v) belongs to this class \(C^\infty _{\pi /2}(J_0)\).
Remark 2.3
When \(J_0=[b,c]\) (\(b<c\)), we set \({\mathbf {c}}^\sharp (u):={\mathbf {c}}_f(b+c-u)\), which has the same image as \({\mathbf {c}}_f(u)\) (cf. (2.1)) but has the opposite orientation. Then
are the unit velocity vector, the unit principal normal vector and the unit bi-normal vector of the curve \({\mathbf {c}}^\sharp (u)\), respectively. If we denote by \(\tau _f(u)\) the torsion function of \({\mathbf {c}}_f(u)\), then
coincide with the curvature and torsion functions of \({\mathbf {c}}^\sharp (u)\), respectively. For each \(f\in {\mathcal {D}}(C)\), we set
and call this the reverse of f. By definition, \(f^\sharp \) has the same image as f, and the involution \( {{\mathcal {D}}}(|C|)\ni f \mapsto f^\sharp \in {{\mathcal {D}}}(|C|) \) is canonically induced. By (2.15), \( \xi ^\sharp _f(u):=\xi _f(b+c-u) \) gives the normalized ruling vector field of \(f^\sharp \) if this is so of \(\xi _f(u)\) for f. Then the first and second angular functions \(\alpha ^\sharp ,\,\, \beta ^\sharp \) of \(f^\sharp \) satisfy
respectively.
Definition 2.4
Let \(J_i\) (\(i=1,2\)) be two sets which are homeomorphic to J, and let \(f_i:J_i\times (-\varepsilon _i,\varepsilon _i) \rightarrow {\varvec{R}}^3\) (\(i=1,2\)) be two developable strips along C, where \(\varepsilon _i>0\). Then \(f_2\) is said to be image equivalent (resp. right equivalent) to \(f_1\) if there exists a positive number \(\delta (<\min (\varepsilon _1,\varepsilon _2))\) such that \(f_1(J_1 \times (-\delta ,\delta ))\) coincides with \(f_2(J_2 \times (-\delta ,\delta ))\) (resp. \(f_2\) coincides with \(f_1\circ \varphi \) for a diffeomorphism \( \varphi :J_1\times (-\delta ,\delta ) \rightarrow J_2\times (-\delta ,\delta ) \)).
Recall that \(s\mapsto {\mathbf {c}}(s)\) (\(s\in J\)) gives an arc-length parametrization of C such that \({\mathbf {c}}(0)={{\mathbf {x}}}_0\). The following assertion holds.
Proposition 2.5
Let \(F,\, G\in {\mathcal {D}}(|C|)\) be normal forms (cf. Definition 2.2) satisfying \(F(0,0)=G(0,0)={{\mathbf {x}}}_0\). Then the following two assertions are equivalent:
-
(1)
\(F=G\) or \(F=G^\sharp \),
-
(2)
F is image equivalent to G.
In particular, for each \(\alpha \in C^\infty _{\pi /2}(J)\), there exists a unique normal form
satisfying \(F^\alpha (0,0)={{\mathbf {x}}}_0\) (cf. (2.12)) whose first angular function is \(\alpha \).
Proof
Replacing G by \(G^\sharp \), we may assume that \(F,\, G\in {\mathcal {D}}(C)\). (In fact, \(G^\sharp \) is a normal form if so is G.) It is obvious that (1) implies (2). So it is sufficient to show the converse. Since each normal form of a developable strip is determined by its base point, the arc-length parametrization of C and the first angular function, (2) implies (1). \(\square \)
We also prove the following assertion:
Proposition 2.6
For each \(f\in {\mathcal {D}}(C)\), there exists a unique normal form \(F\in {\mathcal {D}}(C)\) such that
-
(1)
\(F(0,0)={\mathbf {x}}_0\) (if \(J={\mathbb {I}}_l\), this holds automatically), and
-
(2)
F is right equivalent (cf. Definition 2.4) to f,
where \({\mathbf {x}}_0\in C\) is the base point given in (2.12). Moreover, \({\hat{\mu }}_f={\hat{\mu }}_F=\mu _F\) hold.
We call this F the normal form associated with f of base point \({\mathbf {x}}_0\).
Proof
Applying (Umehara and Yamada 2017, Lemma B.5.3), we can take a curvature line coordinate system (s, v) of f such that \(s \mapsto f(s,0)\) parametrizes C and \(df(\partial /\partial v)\) points in the ruling direction. In this situation, we may assume that \(f(0,0)={\mathbf {x}}_0\) and s is the arc-length parameter of C. We then adjust v so that \(|f_v(s,0)|=1\) for \(s\in J\). Since the image of each v-curve gives a straight line, this parametrization f(s, v) gives the normal form associated to f. \(\square \)
We next prepare the following two lemmas, which will be applied in the later discussions.
Lemma 2.7
Let \(F_i\in {\mathcal {D}}(C)\) \((i=1,2)\) be normal forms satisfying \(F(0,0)=G(0,0)={\mathbf {x}}_0\), and let \(\alpha _i\in C^\infty _{\pi /2}(J)\) be its first angular functions. If \(\alpha _2-\alpha _1\) does not have any zeros on J, then the ruling direction of \(F_1\) (cf. (2.19)) is linearly independent of that of \(F_2\) at each point of C.
Proof
We let \(\xi _i(s)\) (\(i=1,2\)) be the normalized unit ruling vector fields associated with \(F^{\alpha _i}(s,v)\). Since \(\alpha _2(s)\ne \alpha _1(s)\), two vectors
in \({\varvec{R}}^3\) are linearly independent for each \(s\in J\). So we obtain the assertion. \(\square \)
Proposition 2.8
Let \(f\in {\mathcal {D}}(C)\). If T is a symmetry of C (cf. Definition 1.1), then \(T\circ f\) belongs to \({\mathcal {D}}(|C|)\). Moreover, if f is a normal form, then so is \(T\circ f\), and \(dT(\xi _f)\) gives the normalized ruling vector field of \(T\circ f\). Furthermore, the normalized geodesic curvature function of \(T\circ f\) coincides with that of f.
Proof
We denote by F the normal form associated with f of base point \({\mathbf {x}}_0\) (cf. Proposition 2.6). It is sufficient to show the assertion holds for F. Since the property that the geodesic curvature has no zeros is preserved by isometries of \({\varvec{R}}^3\), the first assertion is obtained. Since \(s\mapsto T\circ F(s,v)\) gives an arc-length parametrization of |C|, \(T\circ F(s,v)\) is a normal form. Since the principal normal vector field is common in C and \(-C\) (cf. (A.1)), it can be easily seen that \(dT({\mathbf {n}}(s))\) gives the principal normal vector field of \(T\circ {\mathbf {c}}(s)\), and (2.8) yields that
along C, which implies the second assertion. Since geodesic curvatures on surfaces are geometric invariants up to ±-ambiguities, the geodesic curvature of \(T\circ F\) coincides with \(\sigma \mu _F\), where \(\sigma \in \{1,-1\}\). Moreover, (2.20) implies that \(\sigma =1\), proving the last assertion. \(\square \)
We set
Proposition 2.9
For \(f,\, g\in {\mathcal {D}}(|C|)\), the following five conditions are equivalent:
-
(1)
f is right equivalent to g as map germs,
-
(2)
\(F=G\) or \(F=G^\sharp \), where F and G are the normal forms associated with f and g satisfying \(F(0,0)=G(0,0)={\mathbf {x}}_0\), respectively,
-
(3)
\(F(\Omega ^+_{\varepsilon })=G(\Omega ^+_{\varepsilon })\) for sufficiently small \(\varepsilon (>0)\),
-
(4)
\(F(\Omega _{\varepsilon })=G(\Omega _{\varepsilon })\) for sufficiently small \(\varepsilon (>0)\),
-
(5)
f is image equivalent (cf. Definition 2.4) to g as map germs.
Proof
By Proposition 2.6, (1) implies (2), because \(F(0,0)=G(0,0)={\mathbf {x}}_0\). Obviously (2) implies (3). Moreover, (3) implies (4), because F(s, v) and G(s, v) are ruled strips and are real analytic with respect to the parameter v. On the other hand, it is obvious that (5) is equivalent to (4). If (4) holds, then Proposition 2.5 yields that \(F=G\) or \(F=G^\sharp \). In particular, (1) is obtained. \(\square \)
We next prove the following assertion, which is a refinement of (Honda et al. 2020c, Lemma 1.2).
Proposition 2.10
Let \(F_i\in {\mathcal {D}}(C)\) \((i=1,2)\) be developable strips written in normal forms satisfying \(F(0,0)=G(0,0)={\mathbf {x}}_0\). If their normalized ruling vector fields are linearly independent at each point of C, then \(F_1(\Omega _\varepsilon )\cap F_2(\Omega _\varepsilon )\) coincides with C for sufficiently small \(\varepsilon (>0)\).
Proof
Without loss of generality, we may assume that \(F_1\) and \(F_2\) are defined on a tubular neighborhood of \(J\times \{0\}\) in \(J\times {\varvec{R}}\) and \(F_1(s,0)=F_2(s,0)\) holds for \(s\in J\). Suppose that the assertion fails. Then there exist
-
two sequences \(\{s_n\}_{n=1}^\infty \) and \(\{t_n\}_{n=1}^\infty \) on J, and
-
two sequences \(\{u_n\}_{n=1}^\infty \) and \(\{v_n\}_{n=1}^\infty \) on \((-1/n,1/n)\)
such that
Here, \(s_n\ne t_n\) holds. (In fact, if not, then \(F_1(s_n,u_n)=F_2(t_n,v_n)\) implies \(u_n \xi _1(s_n)=v_n \xi _2(s_n)\), where \(\xi _i\) (\(i=1,2\)) is the normalized ruling vector field of \(F_i\). However, since \(\{\xi _1(s_n),\xi _2(s_n)\}\) is linearly independent, the fact \(u_n \xi _1(s_n)=v_n \xi _2(s_n)\) implies \(u_n=v_n=0\), which contradicts the fact \((s_n,u_n)\ne (t_n,v_n)\).)
Since J is compact, we may assume that the limits \(\displaystyle \lim _{n\rightarrow \infty }s_n=s_\infty \) and \(\displaystyle \lim _{n\rightarrow \infty }t_n=t_\infty \) exist and \(s_\infty ,t_\infty \in J\). Then by (2.22), we have \( F_1(s_\infty ,0)=F_2(t_\infty ,0). \) Since C has no self-intersections, we have \( s_\infty =t_\infty \). By (2.22), we can write
If \(n\rightarrow \infty \), then the left-hand side of (2.23) converges to the vector \({\mathbf {c}}'(s_\infty )(={\mathbf {e}}(s_\infty ))\). Thus, we can conclude that the limits \(\displaystyle \lim _{n\rightarrow \infty }p_n=p_\infty \) and \(\displaystyle \lim _{n\rightarrow \infty }q_n=q_\infty \) exist such that
In particular, we have
We set
and
where \(\alpha _i\) and \(\beta _i\) (\(i=1,2\)) are the first and second angular functions of \(F_i\), respectively. Multiplying \({\mathbf {n}}_\infty \) and \({\mathbf {b}}_\infty \) to (2.24) via inner products, we have
By (2.25), we have
On the other hand, since \(F_1,F_2\in {\mathcal {D}}(C)\) (cf. (2.3)) and \(\xi _1(s_\infty )\) is linearly independent of \(\xi _2(s_\infty )\), we have
which contradicts (2.26). We remark that a similar argument for developable surfaces is used in (Murata and Umehara 2009, Section 5). \(\square \)
Using the same technique, we can prove the following assertion:
Proposition 2.11
Let \(F,G\in {\mathcal {D}}(|C|)\) be developable strips written in normal forms. Then \(F(\Omega ^+_\varepsilon )\) does not meet \(G(\Omega ^-_\varepsilon )\) for sufficiently small \(\varepsilon (>0)\).
Proof
Replacing G by \(G^\sharp \), we may assume that \(F,\, G\in {\mathcal {D}}(C)\). Moreover, replacing G(s, v) by \(G(s+b,v)\) for a suitable \(b\in [0,l)\) if necessary, we may assume that F, G are defined on a tubular neighborhood of \(J\times \{0\}\) in \(J\times {\varvec{R}}\) and \(F(s,0)=G(s,0)\) holds for \(s\in J\). We denote by \(\xi _F\) and \(\xi _G\) the normalized vector fields of F and G, respectively. Then we may assume that F and G are defined on a tubular neighborhood of \(J\times \{0\}\) in \(J\times {\varvec{R}}\). Suppose that the assertion fails. Then there exist
-
two sequences \(\{s_n\}_{n=1}^\infty \) and \(\{t_n\}_{n=1}^\infty \) on J, and
-
two sequences \(\{u_n\}_{n=1}^\infty \) and \(\{v_n\}_{n=1}^\infty \) on (0, 1/n) and \((-1/n,0)\), respectively,
such that \(F(s_n,u_n)=G(t_n,v_n)\) and \((s_n,u_n)\ne (t_n,v_n)\). In this situation, we can show that \(s_n\ne t_n\). (In fact, if \(s_n=t_n\), then \(F(s_n,u_n)=G(t_n,v_n)\) implies \( u_n \xi _F(s_n)=v_n \xi _G(s_n) \) and so we have
Here, \(\xi _F(s_n) \cdot {\mathbf {n}}(s_n)\) and \(\xi _G(s_n)\cdot {\mathbf {n}}(s_n)\) are positive (cf. (2.8)). So this contradicts the facts \(u_n\in (0,1/n)\) and \(v_n\in (-1/n,0)\).)
Since J is compact, we may assume that the limits \(\displaystyle \lim _{n\rightarrow \infty }s_n=s_\infty \) and \(\displaystyle \lim _{n\rightarrow \infty }t_n=t_\infty \) exist and \(s_\infty ,t_\infty \in J\). Since C has no self-intersections, we have \( s_\infty =t_\infty . \) By (2.22), we can write
If \(n\rightarrow \infty \), then the left-hand side of (2.23) converges to the vector \({\mathbf {c}}'(s_\infty )(={\mathbf {e}}(s_\infty ))\). Thus, we can conclude that the limits \(\displaystyle \lim _{n\rightarrow \infty }p_n=p_\infty \) and \(\displaystyle \lim _{n\rightarrow \infty }q_n=q_\infty \) exist such that
Since the left hand side does not vanish, we have
Taking the inner product of \({\mathbf {n}}(s_\infty )\) to (2.28), we have
Since \(u_n>0\) and \(v_n<0\), we have \(p_\infty q_\infty \le 0\). Since \(\xi _F(s_\infty ) \cdot {\mathbf {n}}(s_\infty )\) and \(\xi _G(s_\infty )\cdot {\mathbf {n}}(s_\infty )\) are positive, (2.29) implies that the right hand side of (2.30) does not vanish, a contradiction. \(\square \)
3 The dual developable strips and curved foldings
In this section, we explain curved foldings using pairs of developable strips:
Definition 3.1
Let \(J_i\) (\(i=1,2\)) be bounded closed intervals of \({\varvec{R}}\). Two functions \(\mu _i:J_i\rightarrow {\varvec{R}}\) (\(i=1,2\)) are said to be equi-affine equivalent if there exists a diffeomorphism \(\varphi :J_1\rightarrow J_2\) of the form
such that \( \mu _2\circ \varphi =\mu _1. \) (By definition, if \(\mu _2\) is equi-affine equivalent to \(\mu _1\), then the length of the interval \(J_2\) must be equal to that of \(J_1\).)
In the case of \(J_1=J_2=[b,c]\) (\(b<c\)) and \((\mu :=)\mu _1=\mu _2\), the map \(\varphi :J_1\rightarrow J_1\) is called a symmetry of \(\mu \) if \(\varphi \) is not the identity. (There is at most one possibility for such a \(\varphi \), which must have the expression \(\varphi (u)=b+c-u\). So, if such a \(\varphi \) exists, \(\mu \) satisfies \(\mu (u)=\mu (b+c-u)\) on [b, c].)
Lemma 3.2
For each \(i\in \{1,2\}\), let \(\gamma _i:{\mathbb {I}}_l\rightarrow {\varvec{R}}^2\) \((l>0)\) be a regular curve without self-intersections parametrized by arc-length. Suppose that the curvature functions of \(\gamma _1\) and \(\gamma _2\) are positive-valued. Then the following two assertions are equivalent:
-
(1)
the curvature function of \(\gamma _2\) is equi-affine equivalent to that of \(\gamma _1\),
-
(2)
there exists an isometry T of \({\varvec{R}}^2\) such that \(T(\gamma _1({\mathbb {I}}_l))\) coincides with \(\gamma _2({\mathbb {I}}_l)\).
Proof
We suppose (1). We set \(\gamma _1^\sharp (s):=S\circ \gamma _1(-s)\) (\(s\in {\mathbb {I}}_l\)), where S is the reflection with respect to a straight line in \({\varvec{R}}^2\). We denote by \(\mu _i\) (\(i=1,2\)) the curvature function of \(\gamma _i\). If \(\mu _2\) is equi-affine equivalent to \(\mu _1\), then \(\mu _2\) coincides with the curvature function of \(\gamma _1\) or \(\gamma _1^\sharp \). By the fundamental theorem of curves in the Euclidean plane (cf. (Umehara and Yamada 2017, Chapter 2)), there exists an isometry T in \({\varvec{R}}^2\) such that \(T\circ \gamma _1=\gamma _2\) or \(T\circ \gamma _1^\sharp =\gamma _2\), which implies (2).
Conversely, we suppose (2). Since \(\gamma _1\) and \(\gamma _2\) have no self-intersections, such an isometry T is uniquely determined. Since \(\gamma _1\) and \(\gamma _2\) are parametrized by arc-length, either \(T\circ \gamma _1(s)=\gamma _2(s)\) or \(T\circ \gamma _1(s)=\gamma _2(-s)\) holds on \({\mathbb {I}}_l\). Since the curvature functions of \(\gamma _1\) and \(\gamma _2\) are positive-valued,
holds on \({\mathbb {I}}_l\) if T is an orientation preserving (resp. reversing) isometry of \({\varvec{R}}^3\), which implies \(\mu _1(s)=\mu _2(s)\) (resp. \(\mu _1(s)=\mu _2(-s)\)) for \(s\in {\mathbb {I}}_l\). So (1) holds. \(\square \)
Let \(\mu :{\mathbb {T}}^1_{l}\rightarrow {\varvec{R}}\) be a \(C^\infty \)-function on a one dimensional torus \({\mathbb {T}}^1_{l}:={\varvec{R}}/l{\varvec{Z}}\) (\(l>0\)). Then an a-periodic function \({\tilde{\mu }}:{\varvec{R}}\rightarrow {\varvec{R}}\) defined by
is called the lift of the function \(\mu \), where \(\pi :{\varvec{R}}\rightarrow {\mathbb {T}}^1_{l}\) is the canonical projection.
Definition 3.3
We set \(J_i:={\varvec{R}}/l_i{\varvec{Z}}\) (\(l_i>0,\,\, i=1,2\)). Two functions \(\mu _i:J_i\rightarrow {\varvec{R}}\) (\(i=1,2\)) are said to be equi-affine equivalent if there exists a diffeomorphism \(\varphi :{\varvec{R}}\rightarrow {\varvec{R}}\) of the form
such that \( {\tilde{\mu }}_2\circ \varphi ={\tilde{\mu }}_1, \) where \({\tilde{\mu }}_i\) \((i=1,2)\) are the lifts of the functions \(\mu _i\). When \((\mu :=)\mu _1=\mu _2\) and \(J_1=J_2\), the function \(\mu \) has a symmetry \(\varphi \), if \(\varphi \) is non-trivial, that is, either \(\sigma =-1\) or \(d\not \in l{\varvec{Z}}\) holds, where \(l:=l_1(=l_2)\). (If \(\mu \) is a non-constant continuous function, then \(\varphi \) can be a candidate for symmetries of \(\mu \) only when d/l is a rational number.)
The following is an analogue of Lemma 3.2 for \({\mathbb {T}}^1_l\).
Lemma 3.4
Let \(J_i\) \((i=1,2)\) be two bounded closed intervals, and let \(\gamma _i:J_i\rightarrow {\varvec{R}}^2\) be plane curves of length l parametrized by arc-length. Suppose that each curvature function of \(\gamma _i\) \((i=1,2)\) has a \(C^\infty \)-extension \({\tilde{\mu }}_i:{\varvec{R}}\rightarrow {\varvec{R}}\) which is the lift of an l-periodic function \(\mu _i:{\mathbb {T}}^1_l \rightarrow {\varvec{R}}\). Then the following two assertions are equivalent:
-
(1)
the function \(\mu _2\) is equi-affine equivalent to \(\mu _1\),
-
(2)
there exist a plane curve \({\tilde{\gamma }}:{\varvec{R}}\rightarrow {\varvec{R}}^2\) and an orientation preserving isometry T of \({\varvec{R}}^3\) such that \(\gamma _1(J_1)\) and \(T\circ \gamma _2(J_2)\) are subarcs of \({\tilde{\gamma }}({\varvec{R}})\).
Proof
We suppose (1). Since each curvature function of \(\gamma _i\) (\(i=1,2\)) can be extended as an l-periodic \(C^\infty \)-function \({\tilde{\mu }}_i\) on \({\varvec{R}}\), the curve \(\gamma _i\) is extended as a regular curve \({\tilde{\gamma }}_i:{\varvec{R}}\rightarrow {\varvec{R}}^2\) whose curvature function is \({\tilde{\mu }}_i\). If (1) holds, then there exist \(\sigma \in \{1,-1\}\) and \(d\in [0,l)\) such that
By the fundamental theorem of plane curves, \({\tilde{\gamma }}_2(s)\) coincides with \(T\circ {\tilde{\gamma }}_1(\sigma s+d)\), where T is an orientation preserving isometry of \({\varvec{R}}^2\). By setting \({\tilde{\gamma }}:={\tilde{\gamma }}_1\), (2) is obtained. On the other hand, the converse assertion can be proved easily. \(\square \)
We now define the “geodesic equivalence relation” on \({\mathcal {D}}(|C|)\) as follows:
Definition 3.5
Let C be a non-closed space curve (i.e. \(C:={\mathbf {c}} ({\mathbb {I}}_l)\)) or a closed curve (i.e. \(C:={\mathbf {c}} ({\mathbb {T}}^1_l)\)) of total length l embedded in \({\varvec{R}}^3\). Two developable strip germs \(f,\, g\in {{\mathcal {D}}(|C|)}\) are said to be geodesically equivalent if the normalized geodesic curvature function \({\hat{\mu }}_{f}:J\rightarrow {\varvec{R}}\) is equi-affine equivalent to \({\hat{\mu }}_{g}:J\rightarrow {\varvec{R}}\), where \(J={\mathbb {I}}_l\) or \(J={\mathbb {T}}^1_l\).
The following assertion holds:
Proposition 3.6
Let \(f,g\in {\mathcal {D}}(|C|)\). If f and g are right equivalent, then they are geodesically equivalent.
Proof
By replacing g by \(g^\sharp \), we may assume that \(f,g\in {\mathcal {D}}(C)\). We denote by F and G the normal forms associated with f and g satisfying \(F(0,0)=G(0,0)={\mathbf {x}}_0\), respectively. Then by Corollary 1.10, F coincides with G, which implies \( \mu _f=\mu _F=\mu _G=\mu _g. \) \(\square \)
Later, we will see that the geodesic equivalence relation is useful for constructing curved foldings with a given crease and crease pattern. Based on this, we give the following:
Definition 3.7
For \(f\in {{\mathcal {D}}(|C|)}\), a developable strip germ \(g\in {{\mathcal {D}}(|C|)}\) is called an isomer of f if
-
(1)
g is geodesically equivalent to f, but
-
(2)
g is not right equivalent to f.
Remark 3.8
The above definition of isomers is an analogue for that for cuspidal edges (cf. Honda et al. 2020a). In the case of cuspidal edges, (1) was replaced by the condition that the first fundamental forms of two surfaces are isometric. (It should be remarked that all developable surfaces all mutually locally isometric.)
We now give a tool to construct isomers of a given developable strip. Let \({\tilde{C}}\) be an embedded curve in \({\varvec{R}}^3\) which is homeomorphic to C and has the same total length as C.
Definition 3.9
Let \(\tilde{{\mathbf {c}}}(s)\) (\(s\in J\)) be the arc-length parametrization of \({\tilde{C}}\), and let \({\tilde{\kappa }}(s)\) be its curvature function. Then \(\tilde{{\mathbf {c}}}\) is said to be compatible to \(f\in {\mathcal {D}}(C)\) if it satisfies
where \({\hat{\mu }}_f\) is the normalized geodesic curvature function of f.
Let \(J_0\) be a set which is homeomorphic to J. The following proposition plays an essential role in considering the relationship of developable strips and curved foldings.
Proposition 3.10
Let \(f:U\rightarrow {\varvec{R}}^3\) be a developable strip belonging to \({\mathcal {D}}(C)\) satisfying \(J_0\times \{0\}\subset U\) and \(f(J_0\times \{0\})=C\). Let \(u_0\in J_0\) be the point such that \(f(u_0,0)={\mathbf {x}}_0\), where \({\mathbf {x}}_0\) is the base point (cf. (2.12)) of C. Suppose that \(\tilde{{\mathbf {c}}}(s)\) \((s\in J)\) is the arc-length parametrization of \({\tilde{C}}\) which is compatible to f. Then there exist a tubular neighborhood \(V(\subset U)\) of \(J_0\times \{0\}\) in \(J_0\times {\varvec{R}}\) and developable strips \(g_{+},g_-\) belonging to \({\mathcal {D}}({\tilde{C}})\) such that
-
(1)
\(g_+(u_0,0)=g_-(u_0,0)=\tilde{{\mathbf {c}}}(0)\) (this condition is automatically satisfied if \(J_0\) is a closed bounded interval),
-
(2)
\( J_0\ni u \mapsto g_+(u,0)=g_-(u,0)\in {\varvec{R}}^3 \) gives a parametrization of \({\tilde{C}}:=\tilde{{\mathbf {c}}}(J)\),
-
(3)
the first angular functions \(\alpha _\pm (u)\) of \(g_\pm (u,v)\) satisfy \(\alpha _+=-\alpha _-\),
-
(4)
\(\mu _f=\mu _g\pm \) on \(J_0\) (cf. (2.9)),
-
(5)
\(\alpha _f(u)\) has the same sign as \(\alpha _{g_+}(u)\) for each \(u\in J_0\), and
-
(6)
\(g_+\) and \(g_-\) are normal forms if the same is true of f.
Proof
Since C has total arc-length l, we can take the arc-length parametrization \(u=u(s)\) (\(s\in J\)) so that \(u_0=u(0)\) and \({{\mathbf {c}}}(s):={\mathbf {c}}_f(u(s))\) (\(s\in J\)) parametrizes C. Since \(\tilde{{\mathbf {c}}}\) is compatible to f, \( \tilde{{\mathbf {c}}}(u):=\tilde{{\mathbf {c}}}(s(u)) \) \((u\in J_0)\) gives a parametrization of \({\tilde{C}}\) defined on \(J_0\) such that
where \({\tilde{\kappa }}(u)\) is the curvature function of \(\tilde{{\mathbf {c}}}(u)\). Then there exists a unique function \({\tilde{\alpha }}:J_0\rightarrow (-\pi /2,\pi /2)\) such that
for each \(u\in J_0\). By the compatibility of \(\tilde{{\mathbf {c}}}\), the function \(\sin {\tilde{\alpha }}\) never vanishes. Thus, we can define the second angular function \({\tilde{\beta }}:J_0\rightarrow (0,\pi )\) so that
where \({\tilde{\kappa }}(u)\) and \({\tilde{\tau }}(u)\) are the curvature and torsion functions of \(\tilde{{\mathbf {c}}}(u)\) (\(u\in J_0\)), respectively. We set
where \(\tilde{{\mathbf {e}}}\), \(\tilde{{\mathbf {n}}}\) and \(\tilde{{\mathbf {b}}}\) are the unit tangent vector field, the unit principal normal vector field and the unit bi-normal vector field of \(\tilde{{\mathbf {c}}}\), respectively. Since \(u_0=u(0)\), we obtain (1). It can be easily checked that \(g_\pm \) satisfy (2)–(5). Finally, if f is written in a normal form, then \(u=s\) holds for \(s\in J\), and \({\tilde{c}}(u)={\tilde{c}}(s)\) is parametrized by arc-length. In particular, \(g_\pm (u,v)=g_\pm (s,v)\) give normal forms. So (6) is obtained. \(\square \)
Corollary 3.11
Let \( f:U\rightarrow {\varvec{R}}^3 \) be a developable strip belonging to \({\mathcal {D}}(C)\), where U is a tubular neighborhood of \(J_0\times \{0\}\) in \(J_0\times {\varvec{R}}\). Then there exist a tubular neighborhood \(V(\subset U)\) of \(J_0\times \{0\}\) in \(J_0\times {\varvec{R}}\) and a developable strip \( g:V\rightarrow {\varvec{R}}^3 \) such that
-
(1)
\(f(u,0)=g(u,0)\) for each \(u\in J_0\),
-
(2)
\(\alpha _g(u)=-\alpha _f(u)\) for each \(u\in J_0\),
-
(3)
g is uniquely determined from f as a strip germ along C, and
-
(4)
g is a normal form if so is f.
We call this g the dual of f and denote it by \({\check{f}}\). Then an involution \( {\mathcal {D}}(C)\ni f \mapsto {\check{f}}\in {\mathcal {D}}(C) \) is induced. Moreover, we have
Proof of Corollary 3.11
Setting \(\tilde{{\mathbf {c}}}(u):=f(u,0)\), we can apply Proposition 3.10 because \(f\in {\mathcal {D}}(C)\). Then the absolute value of the first angular function of \(g_-\) coincides with that of \(f\in {\mathcal {D}}(C)\), but the sign is opposite. Thus, \(g_-\) gives the desired developable strip. \(\square \)
By (2) of Corollary 3.11, \({\check{f}}\) has the same geodesic curvature function as f, and we obtain the following:
Proposition 3.12
For each \(f\in {\mathcal {D}}(C)\), the dual \({\check{f}}\) is an isomer of f.
Moreover, we have the following:
Proposition 3.13
Let \(F,G\in {\mathcal {D}}(C)\) be normal forms satisfying \(F(0,0)=G(0,0)\). If \(\mu _F=\mu _G\) and \(F(0,0)=G(0,0)\), then either \(G=F\) or \(G={\check{F}}\) holds.
Proof
Since \(\mu _F=\mu _G\), we have \(\cos \alpha _F=\cos \alpha _G\), which implies \(\alpha _F=\pm \alpha _G\). Since the normal form of a developable strip is determined by its first angular function and its base point, we have \(G=F\) or \(G={\check{F}}\). \(\square \)
Corollary 3.14
Let \(F\in {\mathcal {D}}(C)\) be a normal form. If T is a symmetry of C, then \(T\circ {\check{F}}\) is also a normal form giving the dual of \(T\circ F\).
Proof
Since F is a normal form, so is \({\check{F}}\). By Proposition 2.8, \(T\circ {\check{F}}\) also gives a normal form. So we have
and \(T\circ F(0,0)=T\circ {\check{F}}(0,0)\). Then Proposition 3.13 implies \(T\circ {\check{F}}\) coincides with \(T\circ F\) or its dual. Since \(T\circ {\check{F}}(\Omega _\varepsilon )\) meets \(T\circ F(\Omega _\varepsilon )\) only along C (cf. (3.6)), we obtain the conclusion. \(\square \)

The images of F and its dual given in Example 3.15
Example 3.15
We fix a positive number \(l>0\). Then
gives a helix with arc-length parameter satisfying \(\kappa =\tau =1/2\). We set \(C_1:={\mathbf {c}}_1([-l/2,l/2])\). We fix a constant \(\alpha \in (-\pi /2,0)\cup (0,\pi /2)\) and let \(F\in {\mathcal {D}}(C_1)\) be a normal form whose first angular function is identically equal to \(\alpha \). Then \(T\circ {\check{F}}=F\) holds, where T is the 180 \(^\circ \)-rotation with respect to the normal line of \(C_1\) at the origin. Figure 3 shows the images of F and \({\check{F}}\).
We consider the case that \(J={\mathbb {I}}_l\). Regarding Lemma 3.2, we give the following:
Definition 3.16
The image \(\Gamma \) of a regular curve \(\gamma :{\mathbb {I}}_l\rightarrow {\varvec{R}}^2\) parametrized by arc-length is called a generator of a strip \(f\in {\mathcal {D}}(C)\) (\(C:={\mathbf {c}}({\mathbb {I}}_l)\)) if the curvature function of \(\gamma (s)\) is equi-affine equivalent to the normalized geodesic curvature function \({\hat{\mu }}_{f}(s)\) (\(s\in {\mathbb {I}}_l\)) of f.
We next consider the case that \(J={\mathbb {T}}^1_l\). Regarding Lemma 3.4, we give the following:
Definition 3.17
The image \(\Gamma \) of a regular curve \(\gamma :{\mathbb {T}}^1_l\rightarrow {\varvec{R}}^2\) parametrized by arc-length is called a generator of the strip \(f\in {\mathcal {D}}(C)\) (\(C:={\mathbf {c}}({\mathbb {T}}^1_l)\)) if the curvature function of \(\gamma (s)\) can be smoothly extended as an l-periodic function which is the lift of a function which is equi-affine equivalent to the normalized curvature function \({\hat{\mu }}_{f}(s)\) (\(s\in {\mathbb {T}}^1_l\)) of f.
A generator \(\Gamma \) of f has an ambiguity of isometric motions in the plane \({\varvec{R}}^2\). Since f is a developable surface, it can be developed to a plane, and the curve C is deformed to a plane curve which is congruent to \(\Gamma \). If \(\Gamma \) has no self-intersections, then f can be obtained as a deformation of an immersed developable strip from a tubular neighborhood of \(\Gamma \) to the image of f (cf. Umehara and Yamada 2017, Theorem B.6.4). According to (Fuchs and Tabachnikov 1999), we define “origami maps” as follows:
Definition 3.18
The origami map \(\Phi _f\) induced by \(f\in {\mathcal {D}}(C)\) is defined by
where \({\check{f}}\) is the dual of f. In this setting, C is called the crease of \(\Phi _f\), and a generator \(\Gamma \) of f is called a crease pattern of the origami map \(\Phi _f\). (Since the normalized curvature function \(\mu \) is common in f and \({\check{f}}\), \(\Gamma \) gives a generator of \({\check{f}}\). When \(J_0\) is a bounded closed interval, the congruence class of the crease pattern of \(\Phi _f\) is uniquely determined.)
We set
and
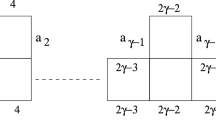
which are the sets of origami maps and the sets of admissible origami maps along C and |C|, respectively. Figure 1 indicates the second angular functions \(\beta \) and \({\check{\beta }}\) of f and \({\check{f}}\), respectively. Here,
is called the adjacent origami map with respect to \(\Phi _f\). Obviously, the union of the images of \(\Phi _f\) and \({\check{\Phi }}_f\) coincides with the union of the images of f and \({\check{f}}\).

Angular functions \(\beta _L\) and \(\beta _R\) on the crease pattern of \(\Phi _f\)
The following fact is known:
Fact 3.19
(Fuchs and Tabachnikov 1999, see also Honda et al. 2020c) A curved folding P along a curve |C| satisfying (i),(ii),(iii) and (iv) (resp. (iv\({}'\))) in the introduction is realized as the image of \(\Phi _F\) for a certain normal form \(F\in {{\mathcal {D}}}(C)\) (resp. \(F\in {{\mathcal {D}}}_*(C))\). Moreover, \(\Gamma \) corresponds to the crease pattern of \(\Phi _F\).
Remark 3.20
More precisely, the condition (ii) in the introduction implies \(\cos \alpha _F >0\) and (iv) (resp. (iv\('\))) in the introduction corresponds to the condition \(\cos \alpha _F \ne 1\) (resp. \(\displaystyle \max _{u\in J_0}|\cos \alpha _F(u)| <1\)). Moreover, \(\mu _F\) coincides with the curvature function with respect to the arc-length parametrization \(\gamma :J\rightarrow {\varvec{R}}^2\) of the generator \(\Gamma \). We set \(\beta _L:=\beta \) and \(\beta _R:=\pi -{\check{\beta }}\), where \(\beta \) and \({\check{\beta }}\) are the second angular functions of F and \({\check{F}}\), respectively. Then \(\beta _L\) (resp. \(\beta _R\)) gives the left-ward (resp. right-ward) angular function of the ruling direction from the tangential direction \(\gamma '(s)\) in the plane \({\varvec{R}}^2\), see Fig. 4.
Here, we set
and
where \({{\text {Im}}}(\Phi _f)\) is the image of the strip germ \(\Phi _f\) along C. Then \({\mathcal {P}}(\Gamma ,C)\) can be considered as the set of curved foldings whose crease and crease pattern are C and \(\Gamma \), respectively. The set \({\mathcal {P}}_*(\Gamma ,C)\) consists of admissible curved foldings along C defined as in the introduction. The following assertion is obvious by the definition of the map \(\Phi :{{\mathcal {D}}}(|C|)\rightarrow {\mathcal {O}}(|C|)\) and Lemma 3.24.
The following assertion implies that we can fold a pair \( \Phi _F(\Omega _\varepsilon ),\, {\check{\Phi }}_F(\Omega _\varepsilon ) \) of curved foldings at the same time whenever \(\varepsilon (>0)\) is sufficiently small:
Proposition 3.21
For each normal form \(F\in {{\mathcal {D}}}(|C|)\),
holds. Moreover, the induced origami map \(\Phi _F\) has no self-intersections.
Proof
Since the ruling vector of F is linearly independent of \({\check{F}}\) at each point of C, the first assertion follows from Proposition 2.10. So we prove the second assertion. If not, (3.6) implies that \(F(\Omega _\varepsilon ^+)\) must meet \(F(\Omega _\varepsilon ^-)\), which is impossible. \(\square \)
Proposition 3.22
Let \(F,G\in {{\mathcal {D}}}(|C|)\) be normal forms. If \(\Phi _F(\Omega _{\varepsilon })\) coincides with \(\Phi _G(\Omega _{\varepsilon })\) for sufficiently small \(\varepsilon \), then F is right equivalent to G.
Proof
We denote by F, G the normal forms associated with f, g satisfying \(F(0,0)=G(0,0)\), respectively. It is sufficient to show the assertions hold for F and G. We suppose \(\Phi _F(\Omega _{\varepsilon })=\Phi _G(\Omega _{\varepsilon })\). By replacing F (resp. G) by \(F^\sharp \) (resp. \(G^\sharp \)), Proposition 2.8 yields that \(F,G\in {{\mathcal {D}}}(C)\) without loss of generality. Then we have \( F(\Omega ^+_\varepsilon )\cup {\check{F}}(\Omega ^-_\varepsilon ) =G(\Omega ^+_\varepsilon )\cup {\check{G}}(\Omega ^-_\varepsilon ). \) By Proposition 2.11, \(F(\Omega ^+_\varepsilon )\cap {\check{G}}(\Omega ^-_\varepsilon )\) is the empty set, and so we have \(F(\Omega ^+_{\varepsilon })=G(\Omega ^+_{\varepsilon })\). By Proposition 2.9, we can conclude that \(F=G\). \(\square \)
We now prove the following:
Theorem 3.23
The map \( \Phi :{{\mathcal {D}}}(|C|) \ni f \mapsto \Phi _f\in {\mathcal {O}}(|C|) \) has the following properties:
-
(1)
\(f,\,g\in {{\mathcal {D}}}(|C|)\) are right equivalent if and only if \(\Phi _F(\Omega _\varepsilon )\) coincides with \(\Phi _G(\Omega _\varepsilon )\), where F, G are normal forms associated with f and g satisfying \(F(0,0)=G(0,0)={\mathbf {x}}_0\), respectively.
-
(2)
If \(\Phi _f\) and \(\Phi _g\) \((f,\,g\in {{\mathcal {D}}}(|C|))\) have the same crease pattern, then f and g are geodesically equivalent.
-
(3)
For each \(f\in {{\mathcal {D}}}(|C|)\), the crease pattern of \({\check{\Phi }}(f)(=\Phi ({\check{f}}))\) coincides with that of \(\Phi (f)\).
-
(4)
Let T be a symmetry of C, then \(T\circ \Phi _F=\Phi _{T\circ F}\) holds for each normal form \(F\in {{\mathcal {D}}}(|C|)\).
-
(5)
Let \(f,\,g\in {{\mathcal {D}}}(|C|)\). If \(\Phi _F(\Omega _\varepsilon )\) is congruent to \(\Phi _G(\Omega _\varepsilon )\), then there exists a symmetry T of C such that g is right equivalent to \(T\circ f\).
Before proving this assertion, we prepare the following lemma:
Lemma 3.24
Let C be a non-closed space curve (i.e. \(J_0\) is a bounded closed interval), and let \(\Gamma \) be a simple arc in \({\varvec{R}}^2\) which is a generator of a developable strip \(F\in {{\mathcal {D}}}(C)\) written in a normal form. Then the following two assertions are equivalent:
-
\(\Gamma \) has a symmetry (cf. Definition 1.1),
-
the geodesic curvature function \(\mu _F\) of F has a symmetry (cf. Definition 3.3).
Proof
Since \({\hat{\mu }}_F\) coincides with the curvature function of \(\Gamma \), the conclusion follows from Lemma 3.2. \(\square \)
Proof of Theorem 3.23
We denote by F, G the normal forms associated with f, g satisfying \(F(0,0)=G(0,0)\), respectively. It is sufficient to show the assertions hold for F and G. Then F is defined on a tubular neighborhood of \(J\times \{0\}\) in \(J\times {\varvec{R}}\). If F, G are right equivalent, then it is obvious that the images of \(\Phi _F,\Phi _G\) coincide. The converse of this assertion follows from Proposition 3.22.
We now prove (2). In the case that J is a bounded closed interval, (2) follows from Lemma 3.24. We then consider the case that J is a one dimensional torus \({\mathbb {T}}_l\) (\(l>0\)). If \(\Phi _F\) and \(\Phi _G\) have the same crease pattern \(\Gamma \), then the curvature function of \(\Gamma \) can be extended as a smooth l-periodic function on \({\varvec{R}}\), and coincides with the lift of common normalized geodesic curvature function of F and G. So F and G are geodesically equivalent.
On the other hand, (3) is obvious from the definition of \({\check{\Phi }}(F)\).
We next prove (4). Let T be a symmetry of C, then, by Corollary 3.14, we have
So \(T\circ \Phi _F\) is right equivalent to \(\Phi _{T\circ F}\) by (1). Since F is a normal form, we have \(T\circ \Phi _F=\Phi _{T\circ F}\).
Finally, we prove (5). Suppose that \(\Phi _F(\Omega _\varepsilon )\) is congruent to \(\Phi _G(\Omega _\varepsilon )\). Then there exists an isometry T of \({\varvec{R}}^3\) such that \(T\circ \Phi _G(\Omega _\varepsilon )\) coincides with \(\Phi _F(\Omega _\varepsilon )\). Since \(T\circ \Phi _G(\Omega _\varepsilon )=\Phi _{T\circ G}(\Omega _\varepsilon )\), Proposition 3.22 implies that \(T\circ G\) is right equivalent to F. So we obtain (5). \(\square \)
4 The inverses and inverse duals
In this section, we set \(J={\mathbb {I}}_l(=[-l/2,l/2])\) (\(l>0\)), that is, C is a non-closed space curve. Let \(I:=[b,c]\) (\(b<c\)) be a closed bounded interval on \({\varvec{R}}\).
Proposition 4.1
Let \(f:U\rightarrow {\varvec{R}}^3\) be a developable strip belonging to \({\mathcal {D}}_*(C)\), where U is a tubular neighborhood of \(I\times \{0\}\, (\subset I\times {\varvec{R}})\). Then there exist a tubular neighborhood \(V(\subset U)\) of \(I\times \{0\}\) in \(I\times {\varvec{R}}\) and two maps \( f_*,{\check{f}}_*:V\rightarrow {\varvec{R}}^3 \) such that
-
(1)
\(f_*\) and \({\check{f}}_*\) belong to \({\mathcal {D}}_*(-C)\),
-
(2)
\(f_*(u,0)={\check{f}}_*(u,0)=f(-u,0)\) for each \(u\in I\),
-
(3)
the first angular function \(\alpha _{f_*}\) takes the same sign as \(\alpha _f\) and satisfies
$$\begin{aligned} \kappa _f(b+c-u)\cos \alpha _{f_*}(u) =\kappa _f(u)\cos \alpha _{f}(u), \end{aligned}$$(4.1)where \({\mathbf {c}}_f(u):=f(u,0)\) \((u\in I)\) and \(\kappa _f(u)\) is its curvature function,
-
(4)
\(\alpha _{{\check{f}}_*}(u)=-\alpha _{f_*}(u)\),
-
(5)
\(f_*\) and \({\check{f}}_*\) are normal forms if f is.
Moreover, such two maps \(f_*\) and \({\check{f}}_*\) are uniquely determined from f as map germs along C.
We call \(f_*\) the inverse of f, and \({\check{f}}_*\) the inverse dual of f (cf. Honda et al. 2020c). By definition,
and so each generator of f gives a generator of \(f_*\) (and of \({\check{f}}_*\)).
Proof
Since f is admissible (i.e. \(f\in {\mathcal {D}}_*(C)\)), we have
We note that \({{\mathbf {c}}}^\sharp (u):={\mathbf {c}}_f(b+c-u)\) (\(u\in I\)) gives the parametrization of \({\tilde{C}}:=-C\). Then \(\kappa _f(b+c-u)\) is the curvature function of \({{\mathbf {c}}}^\sharp (u)\). Since \(\mu _f:=\kappa _f\cos \alpha _f\) is the curvature function of the generator of f, we have
So \({{\mathbf {c}}}^\sharp \) is compatible to f. Thus, there exists a developable strip \(g_{+}\in {{\mathcal {D}}_*(-C)}\) (resp. \(g_{-} \in {{\mathcal {D}}_*(-C)})\) satisfying (1)–(6) of Proposition 3.10. In particular, the first angular function of \(g_+\) (resp. \(g_-\)) is positive (resp. negative). Moreover, by (4.3), \(g_+\) and \(g_-\) are belonging to \({\mathcal {D}}_*(-C)\). Then it can be easily checked that \(f_*:=g_+\) and \({\check{f}}_*:=g_-\) satisfy (1)–(5) of Proposition 4.1. In fact,
coincides with \(\mu _f(u)(=\kappa _f(u)\cos \alpha _f(u))\) by (4) of Proposition 3.10. \(\square \)
Remark 4.2
Fix \(f\in {\mathcal {D}}_*(C)\). By (2.18), the first angular function of the inverse dual \(f_*\) takes the opposite sign as that of \(f^\sharp \).
We have the following:
Proposition 4.3
If \(g\in {\mathcal {D}}_*(|C|)\) is geodesically equivalent to \(f\in {\mathcal {D}}_*(C)\), then g is right equivalent to one of \(\{f,\,\,{\check{f}},\,\, f_*,\,\,{\check{f}}_*\}\).
Proof
Replacing g by \(g^\sharp \), we may assume that \(f,g\in {\mathcal {D}}_*(|C|)\). We denote by F, G the normal forms associated with f, g satisfying \(F(0,0)=G(0,0)\), respectively. Then the assumption that g is geodesically equivalent to f implies \(\mu _F=\mu _G\). By Proposition 3.13 we have \(G=F\) or \(G={\check{F}}\). On the other hand, if \(G\in {\mathcal {D}}_*(-C)\), then, replacing C by \(-C\) and applying Proposition 3.13, we can conclude \(G=F_*\) or \(G={\check{F}}_*\). \(\square \)
Moreover, we can prove the following:
Proposition 4.4
For each normal form \(F\in {\mathcal {D}}_*(C)\), the ruling direction of the inverse \(F_*\) is linearly independent of that of F at each point of C. In particular,
holds for each sufficiently small \(\varepsilon (>0)\).
Proof
Without loss of generality, we may replace f by its normal form F. Since the first angular function of \((F_*)^\sharp \) has the opposite sign of that of F (cf. (2.18)), Lemma 2.7 yields that the ruling direction of \(F_*\) is linearly independent of that of F along C. The last assertion is a consequence of Proposition 2.10. \(\square \)
Using this proposition, we can prove the following:
Proposition 4.5
For \(f\in {\mathcal {D}}_*(C)\), the following three assertions are equivalent:
-
(1)
f is right equivalent to \({\check{f}}_*\),
-
(2)
\({\check{f}}\) is right equivalent to \(f_*\),
-
(3)
the normalized geodesic curvature \({\hat{\mu }}_f\) of f has a symmetry (cf. Definition 3.1).
Proof
The equivalency of (1) and (2) is obvious. So it is sufficient to show that (1) is equivalent to (3). We may assume that f is a normal form and denote it by F. Then F(s, v) is defined on a tubular neighborhood of \({\mathbb {I}}_l\times \{0\}\) in \({\varvec{R}}^2\), where l is the total arc-length of C. Suppose that \(\mu _F\) has a symmetry. Since \(\mu _F(s)=\mu _F(-s)\) for \(s\in {\mathbb {I}}_l\), \(F^\sharp \) is geodesically equivalent to F. Since \(F^\sharp \in {\mathcal {D}}_*(-C)\), Proposition 3.13 yields that \(F^\sharp \) coincides with \(F_*\) or \({\check{F}}_*\). However, \(F^\sharp \) never coincides with \(F_*\) by Proposition 4.4. So we have \(F^\sharp ={\check{F}}_*\).
Conversely, we suppose (1). Then \(F^\sharp ={\check{F}}_*\) holds. By (4.4), we have
which implies that \(\mu _F\) has a symmetry. \(\square \)
In the above discussions, the following assertion was also obtained.
Corollary 4.6
Let \(F\in {{\mathcal {D}}_*}(C)\) be a normal form. If the geodesic curvature \(\mu _F\) has a symmetry, then \({\check{F}}_*=F^\sharp \) holds.
Theorem 4.7
Let \(f\in {\mathcal {D}}_*(C)\) and \(n_f\) the number of right equivalence classes of \(f,\,{\check{f}},\, f_*\) and \({\check{f}}_*\). If the normalized geodesic curvature of f has no symmetries, then \(n_f=4\), otherwise \(n_f=2\).
Proof
We may assume that f is a normal form and denote it by F. Suppose that \(\mu _F\) has a symmetry. By Proposition 4.5, we have \(F={\check{F}}_*\) and \({\check{F}}=F_*\), and \(n_F=2\). On the other hand, suppose that \(n_F<4\). If necessary, replacing F by one of \(\{{\check{F}}\), \(F_*, {\check{F}}_*\}\), we may assume that F coincides with one of \({\check{F}}, F_*, {\check{F}}_*\). By (3.6) and (4.4), F must coincide with \({\check{F}}_*\). By Proposition 4.5, \(\mu _F\) has a symmetry. \(\square \)
Remark 4.8
In Example 3.15, the curvature function of C and the angular function of F are constant, \({\check{F}}_*=F^\sharp \) and \({\check{F}}=F_*^\sharp \) hold. So in this case, \(n_F=2\) holds.
Proof of Theorem A
We fix a curved folding \(P\in {\mathcal {P}}_*(\Gamma ,C)\) arbitrarily. Then there exists a normal form \(F\in {\mathcal {D}}_*(C)\) such that \(P=\Phi _F\), and so \(n_{C,\Gamma }^{}=n_F\). Moreover,
produce all candidates of curved foldings. We let \(\Gamma \) be a generator of F. Since \(\Gamma \) has no self-intersections, the symmetries of \(\Gamma \) correspond to the symmetries of the geodesic curvature function \(\mu _F\) (cf. Lemma 3.24). By (1) of Theorem 3.23, the number \(n_{C,\Gamma }^{}\) of elements in \({\mathcal {P}}_*(\Gamma ,C)\) coincides with the number of distinct subsets in \( \{F(\Omega _{\varepsilon }),{\check{F}}(\Omega _{\varepsilon }), F_*(\Omega _{\varepsilon }), {\check{F}}_*(\Omega _{\varepsilon })\}. \) So we obtain Theorem A by Theorem 4.7. \(\square \)

Images of \(\Phi _1\) and \(\Phi _2\) (left) and images of \(\{\Phi _j\}_{j=1,\ldots ,4}\) (right)
Example 4.9
We consider a one-quarter of the unit circle given by
and
Then \(T(C)=C\), and the developable strip \(F:=F^{\alpha }\) along \(C:={\mathbf {c}}([-\pi /4,\pi /4])\) with the first angular function \(\alpha \) induces four associated origami maps
Since the normalized geodesic curvature \( \mu _F=\cos \alpha \) does not have symmetries, the four curved foldings are distinct. In fact, Fig. 5 left (resp. right) indicates the images of \(\Phi _1\) and \(\Phi _2\) (resp. \(\Phi _1,\ldots ,\Phi _4\)), by which we can observe the four curved foldings \(\Phi _1(\Omega _{\varepsilon }),\ldots ,\Phi _4(\Omega _{\varepsilon })\) are distinct as subsets of \(R^3\) although they are congruent to each other.
5 The congruence classes of isomers of developable strips
We first consider the case that C admits a symmetry:
Lemma 5.1
Suppose that C lies in a plane \(\Pi \), and let \(T_0\) be the reflection with respect to \(\Pi \). Then \(T_0\circ f={\check{f}}\) holds for each \(f\in {\mathcal {D}}(C)\).
Proof
We may assume that C lies in the xy-plane in \({\varvec{R}}^3\). The reflection \(T_0\) maps \((x,y,z)\in {\varvec{R}}^3\) to \((x,y,-z)\in {\varvec{R}}^3\). Since \({\mathbf {b}}=(0,0,1)\) and the second angular function of \({\check{f}}\) coincides with that of f, the assertion follows by a direct calculation. \(\square \)
Let \({\mathbf {c}}(s)\) (\(s\in {\mathbb {I}}_l\)) be the arc-length parametrization of C, where \({\mathbb {I}}_l:=[-l/2,l/2]\). The following assertion plays an important role in the latter discussions:
Theorem 5.2
Let \(F\in {{\mathcal {D}}_*}(C)\) be a normal form, and let T be a non-trivial symmetry of C. Then, the following two assertions hold:
-
(1)
Suppose that T is a positive symmetry. Then \(T\circ F(s,v)=F_*(s,v)\). Moreover, in this setting, if \(\mu _F\) has a symmetry (cf. Definition 1.1), then \(T\circ F(-s,v)={\check{F}}(s,v)\).
-
(2)
Suppose that T is a negative symmetry. Then \( T\circ F(s,v)={\check{F}}_*(s,v) \) holds. Moreover, if \(\mu _F\) has a symmetry, then \(T\circ F(-s,v)=F(s,v)\).
We remark that the developable strip \(F^\alpha \) given in Example 3.15 satisfies (1).
Proof
By a suitable motion in \({\varvec{R}}^3\), we may assume that \(F(0,0)={\mathbf {0}}\) and T is an orthogonal matrix. Then its determinant \(\sigma :={{\text {det}}}(T)\) is equal to 1 (resp. \(-1\)) if T is a positive (resp. negative) symmetry of C.
Since C admits a non-trivial symmetry, we have \(\kappa (-s)=\kappa (s)\), where \(\kappa (s)\) is a curvature function of C with respect to the arc-length parametrization \({\mathbf {c}}\) of C on \({\mathbb {I}}_l\). By the definition of \(\alpha _*(s)\), we have
that is, \( \cos \alpha _*=\cos \alpha _F. \) By (4) of Proposition 4.1, we can conclude \(\alpha _*=\alpha _F\). Then we have
where \(\beta _F\) is the second angular function of F and \({\mathbf {e}},\,{\mathbf {n}},\,{\mathbf {b}}\) are the unit tangent vector field, the unit principal normal vector field and the unit bi-normal vector field of \({\mathbf {c}}\), respectively.
and
By Proposition 2.8, \(T\xi _F(s)\) gives the normalized ruling vector field of \(T\circ F\). Thus \(T\circ F(s,v)\) belongs to \({{\mathcal {D}}}_*(-C)\), and its first and second angular functions are given by \(-\sigma \alpha _*(s)\) and \(\pi -\beta _F(s)\), respectively. Since the geodesic curvature function of \(T\circ F(s,v)\) coincides with \({\hat{\mu }}(s)\) (cf. Proposition 2.8), \(T\circ F\) must coincide with \(F_*\) (resp. \({\check{F}}_*\)) if T is a positive (resp. negative) symmetry of C.
We next suppose that \(\mu _F\) has a symmetry. By Proposition 4.1, \(F^\sharp ={\check{F}}_*\) holds. If \(\sigma =1\), then
which implies the second assertion of (1). Similarly, considering the case of \(\sigma =-1\), we also obtain the second assertion of (2). \(\square \)
Corollary 5.3
Let \(F\in {{\mathcal {D}}_*}(C)\) be a normal form. If C has a non-trivial symmetry T, then \(\{F(\Omega _{\varepsilon }),{\check{F}}(\Omega _{\varepsilon })\}\) coincide with \(\{T\circ F_*(\Omega _{\varepsilon }),T\circ {\check{F}}_*(\Omega _{\varepsilon })\}\) for sufficiently small \(\varepsilon (>0)\).
Proof
By Theorem 5.2, if T is positive (resp. negative), then \( T\circ F(s,v)=F_*(s,v) \) (resp. \( T\circ F(s,v)={\check{F}}_*(s,v) \)) and \( T\circ {\check{F}}(s,v)={\check{F}}_*(s,v) \) (resp. \( T\circ {\check{F}}(s,v)=F_*(s,v)). \) \(\square \)
The following assertion is a refinement of (Honda et al. 2020c, Lemma 3.2):
Proposition 5.4
Let \(F\in {{\mathcal {D}}}_*(C)\) be a normal form. Then \(F(\Omega _{\varepsilon })\) is congruent to \({\check{F}}(\Omega _{\varepsilon })\) for sufficiently small \(\varepsilon >0\) if and only if
-
(1)
C lies in a plane, or
-
(2)
C has a positive symmetry and \(\mu _F\) also has a symmetry.
Proof
By Lemma 5.1 and (2) of Theorem 5.2, (1) or (2) implies that \(F(\Omega _{\varepsilon })\) is congruent to \({\check{F}}(\Omega _{\varepsilon })\). To show the converse assertion, we suppose that \(F(\Omega _{\varepsilon })\) is congruent to \({\check{F}}(\Omega _{\varepsilon })\). Then, there exists an isometry T on \({\varvec{R}}^3\) such that
By Lemma 5.1, we may assume that C does not lie in any plane. It is sufficient to show (2). Since T must be non-trivial, that is, it reverses the orientation of C (cf. Proposition A.1). If T is a negative symmetry of C, then by Theorem 5.2, we have
By Proposition 2.9, we have \({\check{F}}=F_*\), and by Proposition 4.5, \(\Gamma \) has a symmetry. Then, by Lemma 3.24 and Theorem 5.2, we have
contradicting (3.6). So T is a positive symmetry of C and \(T\circ F=F_*\) by Theorem 5.2. By (5.1), we have
which implies \(F_*={\check{F}}\). By Proposition 4.5, \(\mu _F\) has a symmetry. So we obtain (2). \(\square \)
Proposition 5.5
Let \(F\in {{\mathcal {D}}}_*(C)\) be a normal form. Then, for sufficiently small \(\varepsilon (>0)\), \(F(\Omega _{\varepsilon })\) is congruent to \({\check{F}}_*(\Omega _{\varepsilon })\) if and only if
-
(1)
C has a negative symmetry, or
-
(2)
\(\mu _F\) has a symmetry.
Proof
By (2) of Theorem 5.2 and Corollary 4.6, (1) or (2) implies that \(F(\Omega _{\varepsilon })\) is congruent to \({\check{F}}_*(\Omega _{\varepsilon })\). So it is sufficient to show the converse. We suppose that \(F(\Omega _{\varepsilon })\) is congruent to \({\check{F}}_*(\Omega _{\varepsilon })\). We also suppose that \(\mu _F\) has no symmetries. By Proposition 4.5, \(F(\Omega _{\varepsilon })\ne {\check{F}}_*(\Omega _{\varepsilon })\) holds. So C must have a symmetry T such that \( T\circ F(\Omega _{\varepsilon }) ={\check{F}}_*(\Omega _{\varepsilon }). \) If T is not non-trivial, then C lies in a plane \(\Pi \) and T is the reflection with respect to \(\Pi \). By Lemma 5.1, we have
which implies \( F(\Omega _{\varepsilon })= F_*(\Omega _{\varepsilon }). \) However, this is impossible by Proposition 4.4. By Proposition A.1 in the appendix, we may assume T is a non-trivial symmetry of C, that is, T is either a positive or negative symmetry. If T is a positive symmetry of C, Theorem 5.2 yields \(T\circ F_*=F\) and
contradicting (3.6). So T must be a negative symmetry of C. \(\square \)
Similarly, the following assertion holds:
Proposition 5.6
Let \(F\in {{\mathcal {D}}}_*(C)\) be a normal form. Suppose that C does not lie in any plane in \({\varvec{R}}^3\). Then for sufficiently small \(\varepsilon (>0)\), \(F(\Omega _{\varepsilon })\) is congruent to \(F_*(\Omega _{\varepsilon })\) if and only if C has a positive symmetry.
Proof
If C has a positive symmetry, then (1) of Theorem 5.2 implies that \(F(\Omega _{\varepsilon })\) is congruent to \(F_*(\Omega _{\varepsilon })\). So it is sufficient to prove the converse. Suppose that there exists an isometry T satisfying \(T\circ F(\Omega _{\varepsilon }) =F_*(\Omega _{\varepsilon })\). Since \(F(\Omega _{\varepsilon })\ne F_*(\Omega _{\varepsilon })\) (cf. Proposition 4.4), T is a non-trivial symmetry of C. If T is a negative symmetry, Theorem 5.2 yields that \(T\circ F_*={\check{F}}\). Then we have
which contradicts (3.6). So T must be a positive symmetry of C. \(\square \)
We prove the following assertion:
Theorem 5.7
Let \(F\in {{\mathcal {D}}}_*(C)\) be a normal form. If the normalized geodesic curvature of F has no self-intersections, then the number \(N_F\) of congruence classes of
satisfies \(N_F \le n_F\) (the definition of \(n_f\) is given in Theorem 4.7) and also the following properties:
-
(1)
If C has no symmetries and \(\mu _F\) has no symmetries, then \(N_F=4\).
-
(2)
If not the case in (1), then \(N_F\le 2\) holds.
-
(3)
Moreover \(N_F=1\) holds if and only if
-
(a)
C lies in a plane and has a non-trivial symmetry,
-
(b)
C lies in a plane and \(\mu _F\) has a symmetry, or
-
(c)
C has a positive symmetry, and \(\mu _F\) has a symmetry.
-
(a)
Proof
Since two non-congruent subsets of \({\varvec{R}}^3\) are distinct, the relation \(N_F \le n_F\) is obvious. We suppose (1). Since C has no symmetry, C does not lie in any plane. If \(N_F<4\), then replacing F by \({\check{F}},F_*\) or \({\check{F}}_*\), we may assume that \(F(\Omega _\varepsilon )\) is congruent to \(G(\Omega _\varepsilon )\) for sufficiently small \(\varepsilon (>0)\), where G is \({\check{F}},F_*\) or \({\check{F}}_*\). If \(G={\check{F}}\), then Proposition 5.4 implies that C has a positive symmetry, a contradiction. If \(G=F_*\), then by Proposition 5.6, C has a positive symmetry, a contradiction. If \(G={\check{F}}_*\) then by Proposition 5.5, C has a positive symmetry or \(\Gamma \) has a symmetry, which is also a contradiction. So we obtain (1).
We now prove (2). If \(\mu _F\) has a symmetry, then \(N_F\le 2\) follows from Theorem 4.7. So we may assume that C has a symmetry T. If T is trivial, then C lies in a plane and T is the reflection with respect to the plane (cf. Lemma 5.1). Then, we have
for sufficiently small \(\varepsilon >0\), and so \(N_F\le 2\) is obtained. We next consider the case that T is non-trivial. Then Corollary 5.3 implies that \(N_F\le 2\).
Finally, we prove (3). We consider the case (a) or (b). Then C lies in a plane, and \(F(\Omega _\varepsilon )\) (resp. \(F_*(\Omega _\varepsilon )\)) is congruent to \({\check{F}}(\Omega _\varepsilon )\) (resp. \({\check{F}}_*(\Omega _\varepsilon )\)) by Lemma 5.1. If (a) happens, then C admits a positive symmetry by Proposition A.2. So (1) of Theorem 5.2 implies that \(F(\Omega _\varepsilon )\) is congruent to \(F_*(\Omega _\varepsilon )\), and \(N_F=1\) is obtained. If (b) happens, then \(F(\Omega _\varepsilon )={\check{F}}_*(\Omega _\varepsilon )\) by Proposition 4.5. So we have \(N_F=1\).
We next consider the case (c). By (1) of Theorem 5.2, \(F(\Omega _\varepsilon )\) is congruent to \(F_*(\Omega _\varepsilon )\). Moreover, since \(\mu _F\) has a symmetry, \(F(\Omega _\varepsilon )\) (resp. \({\check{F}}(\Omega _\varepsilon )\)) is congruent to \({\check{F}}_*(\Omega _\varepsilon )\) (resp. \(F_*(\Omega _\varepsilon )\)), so we have \(N_F=1\).
Conversely, we suppose \(N_F=1\). Then \(F(\Omega _\varepsilon )\) must be congruent to \({\check{F}}_*(\Omega _\varepsilon )\), and so, Proposition 5.5 implies that
-
(i)
C has a negative symmetry, or
-
(ii)
\(\Gamma \) has a symmetry.
If C lies in a plane, then (i) corresponds to (a) and (ii) corresponds to (b). So we may assume that C does not lie in any plane. Since \(N_F=1\), \(F(\Omega _\varepsilon )\) also congruent to \({\check{F}}(\Omega _\varepsilon )\). Since C is non-planar, (2) of Proposition 5.4 holds, which implies (c). \(\square \)
We now prove Theorem B in the introduction:
Proof of Theorem B
We fix a curved folding \(P\in {\mathcal {P}}_*(\Gamma ,C)\) arbitrarily. Then there exists a normal form \(F\in {\mathcal {D}}_*(C)\) such that \(P=\Phi _F\) and so \(N_{C,\Gamma }=N_F\). Then \(\Gamma \) gives a generator of F. By Lemma 3.24, the condition that \(\Gamma \) has a symmetry can be replaced by the condition that \({\hat{\mu }}_F\) has a symmetry. By Theorem 3.23, Theorem B is obtained as a corollary of Theorem 5.7. \(\square \)
As an application, we can prove the following:
Corollary 5.8
Suppose that C does not lie in any plane. Let \(f\in {{\mathcal {D}}}_*(C)\). If the derivatives of the curvature function \(\kappa _f\) of C and the geodesic curvature function \(\mu _f\) of f both do not vanish at the midpoint of C, then \(N_f=4\) and the number of the congruence classes of curved foldings in \({\mathcal {P}}_*(\Gamma ,|C|)\) is also four, where \(\Gamma \) is a generator of f.
Proof
We let l be the common total length of C and \(\Gamma \). We denote by \(\kappa \) (resp. \(\mu \)) the curvature function of C (resp. \(\Gamma \)) with respect to the arc-length parameter on \({\mathbb {I}}_l\). Since \(\kappa \) (resp. \(\mu \)) is positive-valued, the existence of a symmetry of C (resp. \(\Gamma \)) implies
Differentiating it at \(s=0\), we have
We may assume that f is defined on a tubular neighborhood of \(I\times \{0\}\) in \(I\times {\varvec{R}}\). In the parametrization \(u\mapsto f(u,v)\) of C, we suppose that the point \(s=0\) corresponds to the point \(u=u_0\in I\). Then (5.2) is equivalent to the condition that \(d\kappa _f(u)/du\) (resp. \(d\mu _f(u)/du\)) does not vanish at \(u=u_0\). So, we obtain the conclusion. \(\square \)
Remark 5.9
For a given curve in \({\varvec{R}}^2\) or \({\varvec{R}}^3\), it is difficult to judge that it has a symmetry or not, in general. So we gave Corollary 5.8, which can be considered as a practical criterion on whether a given developable strip (or a curved folding) induces mutually non-congruent isomers or not, without use of the arc-length parametrization of C. In fact, let \(f\in {\mathcal {D}}_*(C)\) be a developable strip as in the proof of Corollary 5.8. As a preliminary step, one should show that the value \(u_0\in I\) giving the midpoint \({\mathbf {c}}_f(u_0)\) of \(C:={\mathbf {c}}_f(I)\) lies in a certain subinterval \(I_1\) in I. (This subinterval is best to be taken as small as possible.) After that if one can show that \(d\kappa _f(u)/du\) and \(d\mu _f(u)/du\) do not vanish at the same time on \(I_1\), then Corollary 5.8 implies that \(N_f=4\).
Example 5.10
(Honda et al. 2020c) Consider the space curve
where \(I:=[1/10,9/10]\). We set \( \alpha (s):={\pi (s+10)}/{24}, \) and consider the developable strip F(s, t) whose first angular function is \(\alpha (s)\). It can be easily checked that F belongs to \({\mathcal {D}}_*(C)\). Then the images of \(F,{\check{F}},F_*\) and \({\check{F}}_*\) belongs to distinct congruence classes as shown in Honda et al. (2020c). This fact can be easily checked by applying Corollary 5.8. In fact, the curvature and torsion functions of \({\mathbf {c}}\) are given by \( \kappa =\tau =\sqrt{2}/(1+s^2). \) Since \(\tau \) is non-constant, the image of \({\mathbf {c}}\) does not lie in any plane. Moreover, since \(\kappa '>0\) everywhere and \(\mu :=\kappa \cos \alpha \) satisfies
Thus, we have reproved the fact \(N_{F}=4\). The figures of the images of \(F,\,{\check{F}},\,F_*\) and \({\check{F}}_*\) are given in (Honda et al. 2020c, Fig. 3).
Although, in the above example, the space curve \({\mathbf {c}}\) has an arc-length parametrization, Corollary 5.8 can be applied without assuming C is parametrized by arc-length:
Example 5.11
We set \(d\in (0,\pi /4)\) and \(I:=[3\pi /8,5\pi /8]\). Consider the embedded space curve defined by
We let f be the developable strip whose first angular function is \(\alpha :=\pi /3\) along \(C:={\mathbf {c}}(I)\). Since \(d\ne 0\), the torsion function of \({\mathbf {c}}\) is not identically equal to zero, that is, C does not lie in any plane. Since the curvature function \(\kappa \) of \({\mathbf {c}}\) is given by
it has the following expansion
with respect to the parameter d, where o(d) is a term of order higher than d. Since the maximum of \(\kappa /2(=\kappa \cos \alpha )\) on I is less than the minimum of \(\kappa (t)\) on I for sufficiently small d , we may assume that f belongs to \({\mathcal {D}}_*(C)\) (in fact, this holds if \(d \le \pi /5\)). By (5.3), we have
Since \(\cos 2t\) is negative on I, the derivative \(\kappa '\) is negative on I for sufficiently small d. Since \(\mu (t):=\kappa (t)/2\) is the geodesic curvature function of C along f, the derivatives \(\kappa '\) and \(\mu '\) do not vanish at the midpoint of C. So, by Corollary 5.8, the images of \(f,\,{\check{f}},\,f_*\) and \({\check{f}}_*\) are mutually non-congruent for sufficiently small \(d(>0)\).
In the authors’ previous work, non-congruence of the images of \(F,\,{\check{F}},\,F_*\) and \({\check{F}}_*\) in Example 5.10 was shown by computing mean curvature functions of their associated developable strips. However, this argument does not work in general, since the mean curvature functions of \(f,{\check{f}},({\check{f}}_*)^\sharp \) and \((f_*)^\sharp \) for \(f\in {\mathcal {D}}_*(C)\) may not take distinct values along C even when their images are non-congruent each other, as follows:
Proposition 5.12
Let \(\kappa (s)\) be a \(C^\infty \)-function defined on an interval I containing \(s=0\), and let \(\alpha :I\rightarrow (0,\pi /2)\) be a \(C^\infty \)-function satisfying
Then there exists an embedded space curve \({\mathbf {c}}(s)\) defined on an interval \(I_1(\subset I)\) containing \(s=0\) satisfying the following properties:
-
(1)
\({\mathbf {c}}(s)\) gives an arc-length parametrization of \(C:={\mathbf {c}}(I_1)\) whose curvature function coincides with \(\kappa \) on \(I_1\).
-
(2)
Let F(s, v) be the developable strip along C whose first angular function is \(\alpha (s)\). Then F belongs to \({\mathcal {D}}_*(C)\) for sufficiently small choice of \(I_1\), and the images of \(F,\,{\check{F}},\, F_*,\,{\check{F}}_*\) are non-congruent each other, however
-
(3)
the restriction of the mean curvature function of F(s, v) on \(I_1\times \{0\}\) is equal to that of \({\check{F}}_*(-s,v)\).
The curvature functions of the space curves and the first angular functions of the developable strips given in Example 5.11 satisfy (5.4).
Proof
We let \(l>0\) be a number so that \({\mathbb {I}}_l=[-l/2,l/2]\) is contained in I. Consider a \(C^\infty \)-function \(\tau (t)\) defined on \({\mathbb {I}}_l\). Then there exists a unique regular space curve \({\mathbf {c}}:{\mathbb {I}}_l\rightarrow {\varvec{R}}^3\) whose curvature and torsion functions are \(\kappa (s)\) and \(\tau (s)\) (\(s\in {\mathbb {I}}_l\)), respectively. Let F(s, v) be the normal form of a developable strip whose angular function is \(\alpha (s)\). If we choose sufficiently small l, then F belongs to \({\mathcal {D}}_*(C)\) because \(0<\alpha (0)<\pi /2\). By (5.4), \( \mu :=\kappa \cos \alpha \) satisfies
This, with the fact \(\kappa '(0)<0\), F satisfies the assumption of Corollary 5.8, and we obtain (1) and (2).
We next adjust the torsion function \(\tau \) to obtain (3): The first angular function A(s) of \(F_1(s,v):={\check{F}}_*(-s,v)\) is given by (cf. (2.16) and (4.1))
We let H(s, v) and \(H_1(s,v)\) be the mean curvature functions of F(s, v) and \(F_1(s,v)\), respectively. By (2.13), the condition \(H(s,0)=H_1(s,0)\) is equivalent to the identity
which can be considered as the quadratic equation of \(\tau \). In fact, (5.6) can be written as
where
By (5.5), we have
which imply (cf. (5.4))
If we set
then \(\displaystyle \lim _{s\rightarrow 0}\tau (s)\) is equal to \(-B_2(0)/(2B_1(0))\). In particular, \(\tau \) gives a \(C^\infty \)-function on \({\mathbb {I}}_l\) for sufficiently small l. So (3) is obtained. \(\square \)
6 The case that C is closed
In this section, we consider the case \(J={\mathbb {T}}^1_l\), that is, C is a closed embedded curve in \({\varvec{R}}^3\). We fix an immersed curve \(\gamma :{\varvec{R}}\rightarrow {\varvec{R}}^2\) with arc-length parameter whose curvature function \(\mu (s)\) of \(\gamma (s)\) is an l-periodic smooth function \({\tilde{\mu }}:{\varvec{R}}\rightarrow {\varvec{R}}\) satisfying
We let \(\Gamma (\subset {\varvec{R}}^2)\) be the image \(\gamma ([b_0,b_0+l])\) of the plane curve \(\gamma \) for some \(b_0\in [0,l)\) such that \(\gamma ([b_0,b_0+l))\) has no self-intersections. Here, such a \(\Gamma \) is not uniquely determined, since the possibilities for \(\Gamma \) have the ambiguity of the choice of the value \(b_0\) (\(\Gamma \) and C have the same length).
If \({\mathcal {P}}_*(\Gamma ,C)\) is defined as in the introduction, then, for each \(P\in {\mathcal {P}}_*(\Gamma ,C)\), we can write \(P=\Phi (F)\) for a developable strip \(F\in {\mathcal {D}}_*(C)\) written in a normal form such that \(\mu (s)\) coincides with the lift \({\tilde{\mu }}_F\) of the normalized curvature function \(\mu _F\) of F (see the beginning of Sect. 2).
Remark 6.1
The plane curve \(\Gamma :=\gamma ([b_0,b_0+l])\) is prepared as the crease pattern of curved foldings belonging to \({\mathcal {P}}_*(\Gamma ,C)\). So \(\Gamma \) should not have any self-intersections. However, this property depends on the choice of \(b_0\in [0,l)\). In fact, we consider the trochoid \(\gamma \) defined by
Then its curvature function is \(2\pi \)-periodic, and two subarcs \(\Gamma _1=\gamma ([0,2\pi ])\) and \(\Gamma _2=\gamma ([\pi ,3\pi ])\) can be considered as fundamental pieces of the trochoid (cf. Fig. 6). The arc \(\Gamma _2\) has a self-intersection but \(\Gamma _1\) does not.

The shapes of \(\Gamma _1\) (left) and \(\Gamma _2\) (right)
We fix a normal form \(F\in {\mathcal {D}}_*(C)\) such that \(\Gamma \) is a generator of F. Without loss of generality, we may assume that F is defined on a tubular neighborhood of \({\mathbb {T}}^1_l\times \{0\}\) in \({\mathbb {T}}^1_l\times {\varvec{R}}\). We assume that the geodesic curvature function \(\mu _F\) of F coincides with \(\mu \). For each fixed \(b\in [0,l)\) and \(\sigma \in \{1,-1\}\), we set
which parametrizes the curve \(C:={\mathbf {c}}({\mathbb {T}}^1_l)\). Since \(F\in {\mathcal {D}}_*(C)\), we can apply Proposition 3.10 for the curve \({\tilde{C}}:=\tilde{{\mathbf {c}}}({\mathbb {T}}^1_l)\). Since \(\sigma =\pm 1\), we obtain normal forms \(F_b^i\in {\mathcal {D}}_*(C)\) (\(i=1,2,3,4\)) whose first angular functions \(\alpha ^i_{b}\in C^\infty _{\pi /2}({\mathbb {T}}^1_l)\) satisfy \(\alpha ^1_b=-\alpha ^2_b>0\), \(\alpha ^3_b=-\alpha ^4_b>0\) and
where \(\kappa (s)\) is the curvature function of \({\mathbf {c}}(s)\) (\(s\in {\mathbb {T}}_l\)). By definition, these four developable strips are all geodesically equivalent to F, and satisfy
and \(F^1_0=F\). The following assertion holds:
Proposition 6.2
Let \(G\in {\mathcal {D}}_*(|C|)\) be a normal form. If G is geodesically equivalent to F, then there exist \(b\in [0,l)\) and \(j\in \{1,2,3,4\}\) such that \(G=F_b^j\).
Proof
Since G is geodesically equivalent to F, \( \mu _G(\sigma s+b)=\mu _F(s) \) holds for some \(\sigma \in \{1,-1\}\) and \(b\in {\mathbb {T}}^1_l\). Replacing F by \(F^\sharp \) if necessary, we may assume that \(\sigma =1\). We set \(G_1(s,v):=G(s+b,v)\). Then we have \(\mu _{G_1}(s,0)=\mu _F(s,0)\) and \(F,G\in {\mathcal {D}}_*(C)\). By Proposition 3.13, \(G_1\) must coincide with F or \({\check{F}}\), which proves the assertion because of the definition of the families \(\{F_{b}^j\}_{b\in {\mathbb {T}}^1_l}\) (\(j=1,2,3,4\)). \(\square \)
Corollary 6.3
Let \(G\in {\mathcal {D}}_*(|C|)\) be a normal form. If \(G(\Omega _{\varepsilon })\) is congruent to \(F(\Omega _{\varepsilon })\) for sufficiently small \(\varepsilon (>0)\), then there exist an isometry T of \({\varvec{R}}^3\) and \(b\in [0,l)\) and \(\sigma \in \{1,-1\}\) such that \(G=T\circ F_b^j\).
Proof
Since \(G(\Omega _{\varepsilon })\) is congruent to \(F(\Omega _{\varepsilon })\), there exists an isometry T of \({\varvec{R}}^3\) such that \(G(\Omega _{\varepsilon })=T\circ F(\Omega _{\varepsilon })\). By Propositions 2.5 and 2.8, \(T\circ F\) is right equivalent to G. In particular, there exists a diffeomorphism \(\varphi \) such that \(T\circ F\circ \varphi =G\). Since \(s\mapsto T\circ F\circ \varphi (s,0)\) and \(s\mapsto G(s,0)\) are both arc-length parametrizations, there exist \(b\in [0,a)\) and \(\sigma \in \{1,-1\}\) such that \(\varphi (s,0)=\sigma s+b\). In particular, \(T\circ F\) is geodesically equivalent to G, and so we obtain the conclusion applying Proposition 6.2. \(\square \)
We prove the following assertion:
Theorem 6.4
Let \(F\in {\mathcal {D}}_*(C)\) and \( \{F^i_{b}\}_{b\in {\mathbb {T}}^1_l} \) \((i=1,2,3,4)\) be defined as above. Then the following assertions hold:
-
(a)
If \(g\in {\mathcal {D}}_*(|C|)\) is geodesically equivalent to F, then there exist \(b\in [-l/2,l/2)\) and \(j\in \{1,2,3,4\}\) such that g is right equivalent to \(F_b^j\).
-
(b)
Suppose that C is not a circle and \(\mu _F\) is not a constant function. Then, for each \(\{i,b\}_{(i,b)\in \{1,2,3,4\}\times {\mathbb {T}}^1_l}\), the set
$$\begin{aligned} \Lambda ^i_{b}&:=\Big \{(j,c)\in \{1,2,3,4\}\times {\mathbb {T}}^1_l \,;\, \\&\quad F^j_{c}(\Omega _{\varepsilon })\text { is congruent to }F_b^i(\Omega _{\varepsilon })\text { for sufficiently small }\varepsilon (>0)\Big \} \end{aligned}$$is finite.
-
(c)
Suppose that C and \(\mu _F\) have no symmetries, then for each \(i\in \{1,2,3,4\}\) and \(b\in [-l/2,l/2)\), the set \(\Lambda ^i_{b}\) consists of a single element.
Proof
Although the strategy of the proof is essentially the same as the corresponding proof for cuspidal edges given in Honda et al. (2020b), we need several modifications, since the real analyticity of C is assumed in Honda et al. (2020b) and the corresponding proof for cuspidal edges does not apply the properties of their normal forms.
The first assertion (a) follows from Proposition 6.2. So we prove (b). Without loss of generality, we may set \(F=F_b^i\). Suppose that the congruence classes of \(\Lambda ^i_{b}\) are not finite. By Proposition 6.2, there exist a sequence \(F_n:=F^{j_n}_{b_n}\) (\(n\ge 1\)) in \({\mathcal {D}}_*(|C|)\) such that
-
\(\{(j_n,b_{n})\}_{n=1}^\infty \) consisting of mutually distinct elements in \(\{1,2,3,4\}\times {\mathbb {T}}^1_l\), and
-
\(F_n(\Omega _{\varepsilon })\) (\(n\ge 1\)) are all congruent to \(F(\Omega _{\varepsilon })\).
Taking a subsequence of \(\{(j_n,b_{n})\}_{n=1}^\infty \) if necessary, we may assume that
-
(A1)
\(j:=j_n\) does not depend on n, and
-
(A2)
\(\{b_{n}\}_{n=1}^\infty \) consists of mutually distinct numbers.
By Corollary 6.3, for each n, there exist an isometry \(T_n\) of \({\varvec{R}}^3\), \(d_n\in [0,l)\) and \(\sigma _n\in \{1,-1\}\) such that \(F_n(s,v)=T_n\circ F(\sigma _n s+d_n, v)\). Then we have the identity
Since the number of possibilities for the signs \(\sigma _n\) is at most two, we may set \(\sigma :=\sigma _n\). Since \(\mu \) is not constant, we can take \(s_0\in [-l/2,l/2)\) such that \(\mu (s_0)\) is a regular value of the function \(\mu \) on \({\mathbb {T}}^1_l\). Substituting \(s=s_0\), (6.3) yields \( \mu (s_0)=\mu (\sigma s_0+d_n). \) Since \({\mathbb {T}}^1_l\) is compact and \(\mu (u_0)\) is a regular value of \(\mu \), the possibilities for \(\{d_n\}_{n=1}^\infty \) are finite, and we may assume \(d:=d_n\) does not depend on n. So we have
for \(n\ge 1\), where \(\sigma '=-1\) if \(j\in \{1,2\}\) and \(\sigma '=+1\) if \(j\in \{3,4\}\). Substituting \(v=0\), we have \( F_n(\sigma ' s+b_n,0)=T_n\circ F(\sigma s+d, 0). \) Since C is not a circle, the number of symmetries of C is finite (see Proposition A.3 in the appendix). So, the number of possibilities for \(b_n\) and \(T_n\) are also finite, contradicting (A2), and we obtain (b).
Finally, we prove (c). If the assertion fails, then we can choose \((j,c) \in \Lambda \). By Corollary 6.3, there exist T of \({\varvec{R}}^3\), \(b\in [0,l)\) and \(\sigma \in \{1,-1\}\) such that
Substituting \(v=0\), it can be easily checked that \(T(C)=C\). Since C admits no symmetries, T must be the identity map. So (6.4) reduces to \( F^j_c(s,v)=F(\sigma s+b,v). \) Since \(\mu _F\) coincides with \(\mu _{F^j_c}\) (cf. (6.2)), we have \( \mu _F(s)=\mu _F(\sigma s+b)\,\, (s\in {\mathbb {T}}^1_l). \) Since \(\mu _F\) has no symmetries, we have \((\sigma ,b)=(1,0)\), that is, \(F^j_c=F\) holds, proving the assertion (c). \(\square \)
Proof of Theorem C
Like as in the case of Theorem B, Theorem C is obtained by applying Theorems 6.4 and 3.23. Condition (3) is not used to prove Theorem C, which is required for the definition of the set \({\mathcal {P}}_*(\Gamma ,|C|)\). \(\square \)
As we have pointed out, the crease pattern \(\Gamma \) of a curved folding along a closed curve C does not necessary to be a closed curve. However, from the viewpoint of curved foldings, the most interesting case is that \(\Gamma \) is a closed curve without self-intersections as well as the crease C:
Example 6.5
Consider a curve
lying on a rotationally symmetric torus in \({\varvec{R}}^3\). We denote by \(L_m\) the length of \({\mathbf {c}}_m\). Then for each \(m\ge 2\), the inequality \(\displaystyle \min _{t\in [0,2\pi ]}\kappa _m(t)>2\pi /L_m\), holds, where \(\kappa _m(t)\) is the curvature of \({\mathbf {c}}_m(t)\). So if \(\Gamma \) is an ellipse of length \(L_m\) which is sufficiently close to a circle, then \({{\mathcal {P}}}_*(\Gamma ,C_m)\) is non-empty. For example, consider an ellipse \( \gamma (t):=(\cos t,a \sin t) \) for \(a:=6/5\), whose curvature function is given by \( \mu (t)=a(\sin ^2 t+a^2 \cos ^2 t)^{-3/2}. \) We set \(m=3\) and
where \(l^{}_\gamma \) is the length of \(\gamma \). Then the two curves \({\tilde{\gamma }}\) and \({\mathbf {c}}_3\) have a common length. We reparametrize \({\tilde{\gamma }}\) by the arc-length parameter s (\(0\le s\le L_3\)) so that \({\tilde{\gamma }}(0)=(k,0)\). Let \(F\in {{\mathcal {D}}}_*(C_3)\) be the developable strip along \(C_3\) such that \(\mu _F(t)={\hat{\mu }}(t)\), where \( {\hat{\mu }}(s) \) is the curvature function of \({\hat{\gamma }}(s):={\tilde{\gamma }}(t(s))\). Figure 7 indicates the crease patterns of the curved foldings induced by F (left), \(F^1_{b}\) (center) and \(F^1_{2b}\) (right) for \(b=1/8\) via the map \(\Phi \), respectively (cf. (6.2) and Definition 3.18).

The ruling directions on the ellipse of three non-congruent curved folding along \(C_3\)
Notes
Since we have used the capital letters \(F,\, G\) to express the normal forms of developable strips, we use lower-case letters \(f,\, g\) to express general developable strips.
References
Demaine, E.D, Demaine, M.L., Huffman, D.A., Koschitz, D., Tachi, T.: Characterization of curved creases and rulings: design and analysis of lens tessellations, Origami\({}^6\), I. Mathematics, 209–230, Amer. Math. Soc., Providence, RI (2015)
Demaine, E.D., Demaine, M.L., Huffman, D.A., Koschitz, D., Tachi, T.: Conic crease patterns with reflecting rule lines, Origami\({}^7\), Vol. 2. Mathematics, 573–589, Tarquin, St. Albans (2018)
Duncan, J.P., Duncan, J.L.: Folded developables. Proc. R. Soc. Lond. Ser. A. 383, 191–205 (1982)
Fuchs, D., Tabachnikov, S.: More on paperfolding. Am. Math. Mon. 106, 27–35 (1999)
Fuchs, D., Tabachnikov, S.: Mathematical Omnibus: Thirty Lectures on Classic Mathematics. American Math Soc, Providence (2007)
Honda, A., Naokawa, K., Saji, K., Umehara, M., Yamada, K.: Duality on generalized cuspidal edges preserving singular set images and first fundamental forms. J. Singul. 22, 59–91 (2020)
Honda, A., Naokawa, K., Saji, K., Umehara, M., Yamada, K.: Cuspidal edges with the same first fundamental forms along a knot. J. Knot Theory Ramifications 29, 2050047 (2020)
Honda, A., Naokawa, K., Saji, K., Umehara, M., Yamada, K.: Curved foldings with common creases and crease patterns. Adv. Appl. Math. 121, 102083 (2020)
Huffman, D.A.: Curvature and creases: a primer on paper. IEEE Trans. Comput. C–25, 1010–1019 (1976)
Kilian, M., Flöry, S., Chen, Z., Mitra, N.J., Sheffer, A., Pottmann, H.: Curved Folding, In ACM SIGGRAPH2008 Papers (SIGGRAPH’08). ACM, New York, NY, USA, Article 75, 9 pages (2008)
Murata, S., Umehara, M.: Flat surfaces with singularities in Euclidean 3-space. J. Differ. Geom. 82, 279–316 (2009)
Umehara, M., Yamada, K.: Differential Geometry of Curves and Surfaces. World Scientific Inc, Singapore (2017)
Acknowledgements
The authors thank Professors Jun Mitani and Wayne Rossman for valuable comments.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
A. Honda was partially supported by Grant-in-Aid for Early-Career Scientists No. 19K14526 and Grant-in-Aid for Scientific Research (B) No. 20H01801. K. Naokawa was partially supported by Grant-in-Aid for Young Scientists (B) No. 17K14197, and K. Saji was partially supported by Grant-in-Aid for Scientific Research (C) No. 18K03301, K.Yamada was partially supported by Grant-in-Aid for Scientific Research (B) No. 17H02839.
Appendix A. Symmetries of curves
Appendix A. Symmetries of curves
In this appendix, we prove several assertions on symmetries of curves in \({\varvec{R}}^2\) or \({\varvec{R}}^3\): Let \({\mathbf {c}}:{\mathbb {I}}_l\rightarrow {\varvec{R}}^3\) be an embedded arc parametrized by arc-length, and denote by C its image, where \({\mathbb {I}}_l=[-l/2,l/2]\). Let T be a symmetry (cf. Definition 1.1) of C which reverses the orientation of C. Here, we ignore the orientation of C. The following assertion holds obviously.
Proposition A.1
Suppose the space curve C admits a symmetry T. Then T is an involution, and has the following properties:
-
(1)
C lies in a plane, and T is the reflection with respect to the plane, or
-
(2)
T is a positive or negative non-trivial symmetry of C.
If T is a non-trivial symmetry of C, then \(T\circ {\mathbf {c}}(-s)={\mathbf {c}}(s)\) holds. By differentiating, we have
where \(\sigma \in \{+,-\}\) is the sign of \({{\text {det}}}(T)\). Using this, we show the following assertion:
Proposition A.2
The space curve C admits a positive symmetry and a negative symmetry (cf. Definition 1.1) at the same time if and only if C lies in a plane and C has a non-trivial symmetry.
Proof
Suppose that C admits a positive symmetry \(T_1\) and a negative symmetry \(T_2\) at the same time. By (A.1), the torsion function \(\tau (s)\) of \({\mathbf {c}}(s)\) satisfies \(\pm \tau (-s)=\tau (s)\). So \(\tau \) must vanish identically, that is, C lies in a plane. Since the trivial symmetry C is uniquely determined and is the reflection with respect to \(\Pi \), the symmetry \(T_1\) of C must be non-trivial, and the “only if” part is proved.
To prove the converse, we suppose that C lies in a plane and C has a non-trivial symmetry. Then each point of C is fixed by the reflection \(T_0\) with respect to the plane. We let \(T_1\) be a non-trivial symmetry of C. If \(T_1\) is a positive (resp. negative) symmetry of C, then \(T_2:=T_0\circ T_1\) is a negative (resp. positive) symmetry of C. So we obtain the conclusion. \(\square \)
Proposition A.3
Let \({\mathbf {c}}:{\mathbb {T}}^1_l \rightarrow {\varvec{R}}^3\) \((l>0)\) be an embedded \(C^\infty \)-regular curve. Then \(C:={\mathbf {c}}({\mathbb {T}}^1_l)\) has at most finitely many symmetries, unless C is a circle.
Proof
We may assume that \({\mathbf {c}}(s)\) has an arc-length parametrization and denote by \(\kappa (s)\) its curvature function. Since \({\mathbf {c}} \) is not a circle, \(\kappa \) is not a constant function. By Sard’s theorem, the set of critical values of \(\kappa \) is of measure zero. We choose a regular value r of the curvature function \(\kappa \) such that \(\kappa ^{-1}(r)\) consists of finitely many points \(s_1,\ldots ,s_n \in {\mathbb {T}}^1_l\). Then we set \({\mathbf {x}}_i={\mathbf {c}}(s_i)\) (\(i=1,\ldots ,n\)). Suppose that there are infinitely many distinct non-trivial symmetries \(\{T_j\}_{j=0}^\infty \) of C. Then \( T_j({\mathbf {x}}_1)\in \{{\mathbf {x}}_1,\ldots ,{\mathbf {x}}_n\}. \) So, there exists \(j_0\in \{1,\ldots ,n\}\) such that \( T_j({\mathbf {x}}_1)={\mathbf {x}}_{j_0}=T_1({\mathbf {x}}_1) \) for infinitely many \(j\ge 2\). Since there exist at most finitely many non-trivial symmetries of C fixing \({\mathbf {x}}_1\), \(\{T_j\}_{j=0}^\infty \) must consist of at most finitely many isometries of \({\varvec{R}}^3\) a contradiction. \(\square \)
Note Added in Proof: In the last section of the following authors’ recent paper
A. Honda, K. Naokawa, K. Saji, M. Umehara and K. Yamada, A generalization of Zakalyukin’s lemma, and symmetries of surface singularities, to appear in J. Singul. (arXiv:2104.03505),
the existence of a canonical map from the set of real analytic cuspidal edges along a curve C into the set of curved folding along C is shown. This map is not injective, but it maps a pair of cuspidal edges with the same first fundamental form to a pair of curved folding with the same crease and crease pattern. The existence of the map does not produce any new proofs of our main theorems, but is useful to understand how two objects are related to each other.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Honda, A., Naokawa, K., Saji, K. et al. On the existence of four or more curved foldings with common creases and crease patterns. Beitr Algebra Geom 63, 723–761 (2022). https://doi.org/10.1007/s13366-021-00602-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s13366-021-00602-2