
Abstract
Small unmanned aerial vehicles are a threat for manned aviation. Their increased use by hobby pilots and within the commercial sector has been accompanied by an increase in incidents involving manned aircraft. The problem is that current aircraft structures are designed to resist collisions with birds. They are not designed to withstand drone impacts. The composition of drones differs significantly from previously known load cases. Drones consist of several components with various materials. This means, that there is no analytic model to determine the impact force of such drone strikes with aircraft structures. Within this work, a novel reduced order model for drone impacts is developed. It is validated with high velocity impact test data and explicit finite element simulations. The impact of fragmenting components of the drone are modelled with the aircraft impact model. The impact of non-fragmenting components like motors are described with a spring-mass model. The results show that the approach of superimposing a spring-mass model with the aircraft impact model leads to good results. In case of a rigid target only minor deviations occur within the validity range of the model. Damage and degradation of the target is not included in the model what leads to larger deviations in case of an impact with deformable structures. Nevertheless, the model is very well suited for rapid load estimation and can qualitatively reproduce contact force curves. It can be used for preliminary design of aircraft structures without conducting time and cost intensive tests and simulations.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Unmanned aerial vehicles (UAV) are an increasing threat for manned aviation. Such UAVs are also known as drones. The number of drones and their operators increase, what leads to an increase in incidents between manned aircraft and drones. Statistics from UK and Germany show this increase up to 2019, before the Covid19 pandemic and the corresponding decrease in worldwide flight traffic [1, 2]. In this work, the term “drone strike” is used. We define a drone strike as the collision of an unmanned aerial vehicle with a manned aircraft. Drone strikes are often compared in the literature with bird strikes. Current aircraft structures certified after certification specification (CS) 23, CS 25 and CS 29 are designed to withstand bird strikes. Compared to a bird strike, we have the following differences:
-
A bird consists of 90 Vol-% water.
-
A drone consists of various solid components (e. g. motors, batteries, payload, electrical systems).
-
A drone can be deliberately steered into an aircraft.
-
Current structures are designed to withstand bird strikes, not drone strikes.
Since 2010 more and more drones are used within the airspace. First authors discussed the drone strike problem in 2013 with a simple analytic penetration equation. They concluded that drones and their components are able to perforate aircraft windshields [3]. In the following years, a lot of authors started research on the drone strike problem. Gettinger et al. [4] performed a comprehensive analysis of drone incidents. He suggested solutions to prevent drone incidents, like geo-fencing, traffic management and registration. Bayandor, Song and Schroeder are the first researchers that investigated drone strikes with aircraft engines and aircraft structures [5,6,7,8,9] with finite element simulations. Their main conclusions are that the ingestion and impact of large drones may lead to a catastrophic damage of the aircraft engine and aircraft structure. For example, fan blades may suffer large damage and plastic deformations. A large report about drone strikes was published by ASSURE (Alliance for System Safety of UAS through Research Excellence) in 2017. The results from the references [4,5,6,7,8,9] are the basis for their studies. In four parts, they studied the impact of quadcopter and fixed wing drones with commercial and business type aircraft [10,11,12,13]. They performed single component tests as well as finite element simulations for their investigations. A lot of attention gained the “Risk in the Sky?” video from University of Dayton Research Institute, where they shot a DJI Phantom 2 drone against a Mooney M20 wing with a relative impact velocity of 120 m/s [14]. The wing suffered severe damage as well as the drone. Wang, Meng and Lu et al. [15,16,17,18] studied the impact of a DJI Inspire 1 drone with various parts of a commercial airliner, e.g. windshield, wing leading edge and high lift devices. Their main conclusion is that an aircraft cannot safely continue its flight after an impact. Their approach is to accelerate the investigated part of the aircraft, what is more realistic in comparison to just study the relative impact velocity, due to the realistic energy distribution. Franke et al. [19], Jonkheijm et al. [20], Ritt et al. [21] as well as Slowik [22] studied collisions with helicopter structures. Their main conclusion is that open category size drones like the DJI Phantom may produce severe damage if it collides with a helicopter windshield. Further authors performed mainly numerical investigations of drone strikes. A timeline of all relevant papers and conducted research regarding drone strikes is shown in Fig. 1.

Overview state of the art
The state-of-the-art shows that drone strikes are mainly analyzed via tests and explicit finite element analysis (FEA). They are time and cost expensive and do not allow a rapid load estimation in a preliminary design phase. Previous studies of drone strikes have not dealt with analytic modeling of the problem. Nevertheless, during the preliminary design phase a method is needed for a rapid load estimation. The aim of this paper was to develop a new analytic model to describe drone collisions in a simplified manner. The impact force of a drone strike is a key mechanism for further design of aircraft structures. Without a load estimation, structures cannot be designed. The analytic model should produce the force–time curves of the contact force between projectile (drone) and target (aircraft). As the drone strike is a problem of multiple components, hitting the target one after the other, it must be able to show this sequential impact process. We focus within this work on small unmanned aerial vehicles (sUAV) with a maximum take-off weight of 1.5 kg and velocities between 20 and 150 m/s. The lowest velocity simulates the impact of an sUAV with a hovering helicopter, whereas the highest velocity describes the drone strike with an aircraft during take-off. The model will not describe the damage and the degradation of the target structure. The analysis is only valid for metallic structures. Composite structures have a much more complex damage behavior, which is not considered within the scope of this study.
2 Analytic models
This chapter will discuss two impact models for drone strikes. Due to the requirements on the model, we consider approaches which will gain a force–time curve. The spring-mass approach is well established for modeling impacts. It is valid for point masses and components with a constant mass during the impact, like motors or cameras (see [23]). This means that they are not fragmenting. The second model, which is investigated, is the extended aircraft impact model. This model is discussed, because we assume a comparable fragmenting damage behavior of the projectile structure, as it is expected within the aircraft impact model.
2.1 Spring-mass impact model
Spring-mass models are one-dimensional approaches which can describe the dynamics of a structure. The general spring-mass model has two degrees of freedom. There are two masses \(m\) and four spring stiffnesses, see Fig. 2a. The contact is described with stiffness \({k}_{\text{c}}\). Membrane stiffening effects are modelled with \({k}_{\text{m}}\). Bending and shear stiffness are described with \({k}_{\text{b}}\) and \({k}_{\text{s,}}\) respectively. Both springs can be modelled with a series connection, which leads to the stiffness \({k}_{\text{bs}}\) [24, 25]:
The full system may be described with the following equations:

Spring-mass models
The contact force \(P\) acts between the masses \({m}_{1}\) and \({m}_{2}\). This force is described with the Hertzian contact model [25]:
The contact stiffness is \({k}_{\text{c}}\). Abrate [25] states that in many cases membrane stiffnesses and transverse strains can be neglected. If a small indentation is assumed compared to the overall deformation, the full model simplifies to a 1-D spring-mass system (Fig. 2b):
Damping may be neglected due to the short contact times.
2.2 Aircraft impact model
With the help of spring-mass models, the impact of rigid projectiles and projectiles with constant mass can be described. This is valid for heavy and dense components of an sUAV, like the motors or the camera. In contrast to this behavior, however, sUAV components like the shell or battery will show a more fluid-like impact behavior. They tend to show a fragmenting damage. Previous research proves this (e.g. May et al. [26]).
To model this behavior, another approach is needed. The extended aircraft impact model (AIM) from Franke et al. [27] can be used to describe this impact behavior. The model is based on the AIM from Riera [28]. The whole impact process can be divided into three subsystems (see Fig. 3):
-
The first one (I) is the rigid, undamaged portion of the projectile.
-
The second one (II) is the crushed part of the projectile.
-
The third subsystem (III) describes the target with a spring-mass model.

AIM with deformable target
With the help of the conservation of momentum at the subsystems, the AIM can be derived (see [29]). This basic model is extended towards drone impacts. Drones can rotate 360° around their vertical axis and aircraft target structures can be inclined. Furthermore, the aircraft target structures are not as rigid as the targets assumed by the original AIM, which are thick concrete structures. The following equation shows the extended AIM:
Here, the parameter \({P}_{\text{c}}\) is the burst load distribution. This distribution specifies, how much force is needed to crush a certain part of the projectile structure. The parameter \(\mu\) describes the mass per unit length. The current impact velocity is \(v\) and the \(\gamma\) as well as \(\xi\) describe the target inclination around the y-axis and z-axis. The following two differential equations are needed to describe the impact on a deformable target [29]:
The initial conditions are as follows:
In case of a rigid target \({k}_{\text{t}}\) and \({c}_{\text{t}}\) are 0.
3 New drone strike model
3.1 General considerations
It has been shown that a drone impact is a sequential impact of multiple components with various impact behaviors. Motors and cameras show a non-fragmenting behavior with plastic deformations whereas the drone shell and the battery tend towards a fragmenting, fluid like behavior. Both have their own modelling approach. The approach of the new drone strike model (DSM) is to superpose both models at the appropriate positions. In dependence of the target behavior, there are two mechanical substitute models. The contact force during a drone strike will be determined with these models.
3.2 Soft or hard impact
During an impact, kinetic energy is converted into, for example, heat, friction and deformation. The terms hard and soft impact describe, where this energy conversion mainly takes place. In a simplified manner, the soft impact states that the target is sufficiently rigid and has negligible damage. The projectile is destroyed. During a hard impact, the target as well as the projectile show significant deformations and damage. We use the approach from Kœchlin und Potapov [30] to differentiate between hard and soft impacts. Their approach uses the target and projectile strengths as follows:
The parameter \({\sigma }_{\text{C}}\) is the compressive strength of the projectile whereas \({\sigma }_{\text{t,C}}\) is the target compressive strength. The value of \(\rho {v}_{\text{i}}^{2}\) is the mass inertia with the projectile density \(\rho\) and its initial velocity \({v}_{\text{i}}\). Their approach is developed for thick steel-reinforced concrete structures. In contrast, a drone collides with thin aircraft structures. Due to this, we extend the distinction between hard and soft impact by another condition. A new perforation condition is introduced. This condition is based on the FAA penetration equation [31]. The impact can be classified as a soft impact if the following condition is fulfilled as follows:
The mass of the projectile is \({m}_{\text{p}}\), \(\beta\) is the impact angle between projectile and target around the transverse axis. The parameter \({C}_{\text{s}}\) is the shear strength of the projectile, \({L}_{\text{u}}\) is the projected projectile perimeter and \(h\) is the target thickness. Equation (10) states that if the kinetic energy is larger than the energy needed to punch a whole into the target, it comes to perforation. That means, that the projectile is theoretical able to perforate the target. In reality, perforation will not always occur, as the kinetic energy will not be fully converted into deformation energy. Nevertheless, the target will show significant deformations and damage. Both criteria (9) and (10) must be fulfilled for a soft impact. Otherwise, the impact is a hard impact.
3.3 Analytic model for soft impacts
The impact on a sufficiently rigid target is defined as a soft impact. Figure 4 shows the application of different modelling approaches in dependence of the position along the sUAV and the mechanical substitute model for such soft impacts. The full drone is simplified to a 1-D line model and divided into two areas. In area 1 the extended AIM is used. In area 2, the extended AIM is superposed with a single degree of freedom spring-mass model. The drone strike can be described with the following equation:

a Application of modelling approaches in dependence of the position along an sUAV; b Mechanical substitute model for soft impacts
The force \({P}_{\text{FM}}\) may be calculated with a 1-DoF spring-mass model as follows:
In this model, \({x}_{\text{ma}}\) and \({x}_{\text{me}}\) describe the start and end position of non-fragmenting components. The parameter \({k}_{\text{e}}\) is a substitute stiffness, whereas \({m}_{\text{pnf}}\) is the mass of the non-fragmenting impactor. The contact duration is \({t}_{\text{f}}\).
Both the substitute stiffness and the contact duration have to be determined with experiments or numerical simulations. The use of a 1-DoF spring-mass model is a vast simplification of the highly nonlinear impact phenomenon. Effects due to contact, plastic deformations and further damage of the projectile as well as effects due to friction are modelled in a simplified manner with the empirically determined substitute stiffness. As the DSM should be used for a rapid load estimation during a preliminary design phase, it is not necessary to use more precise, higher fidelity models. These can be used, but they are out of the scope of this work.
3.4 Analytic model for hard impacts
In case of a deformable target, the impact may be defined as a hard impact. In that case, the differential equations are coupled. The deformable target behavior is described with a spring-mass model. The mechanical substitute model is shown in Fig. 5. Equation (13) describes the drone strike model for hard impacts as folllows:

Mechanical substitute model for hard impacts
The relative velocity is \({\text{d}}x/{\text{d}}t\). The force from non-fragmenting components can be determined with the following equation:
We use the Runge–Kutta 45 method to solve the equations for both models.
Complex geometries can be described within this approach with the two spring stiffnesses, the damping and the target mass. Input values for these model parameters can be determined with preliminary tests or simulations.
3.5 Experimental setup
For validation, we use impact tests and finite element simulations. This chapter describes the impact test rig as well as projectiles and targets.
3.5.1 Dynamic impact test
Impact tests are performed with a gas gun. Pressurized air is used to accelerate the sabot with the projectile within the acceleration pipe. The pipe has a diameter of 50 mm. The air is released from the pressure tank with a quick opening valve. An interceptor at the end of the pipe separates sabot and projectile. The projectile flies through three light barriers, which are used for velocity measurement. Finally, the projectile hits the target. The impact process is recorded with a high-speed camera with 30,000 fps. Four CFW 100 kN piezo force measurement cells are placed behind the target structure to measure the force and the target response. Figure 6a shows the assembly of the gas gun and (b) the target area of the real gas gun.

a Sketch of gas gun assembly; b Target area real gas gun
Two target structures are investigated. The first structure is a rigid target. We assume the target as rigid if it shows a deflection of 1% of its thickness in case of a central point load force of 100 kN. The geometry of the rigid target is optimized for handling qualities (see Fig. 7).

Rigid target structure
Further structures are flat generic Aluminum Al2024-T3 plates (385.0 mm × 290.0 mm × 2.54 mm). This material is studied because it is a standard aerospace material and it has an isotropic behavior. The samples are clamped all around with 14 M8 countersunk screws in a so-called picture frame. Figure 8 shows a sample before a test was performed. All conducted impact tests are listed in Table 1.

Al2024-T3 sample within the picture frame structure [23]
3.5.2 Projectile structure
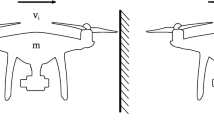
Due to size limitation of the gas gun, an impact test with a complete drone is not possible. This means that the effect of the multi-body impact cannot be investigated directly via tests of the complete drone. However, the multi-body impact is a basic physical problem and a significant characteristic of the drone impact and cannot be fully represented by tests of individual components. This means that a substitute model must be used. Figure 9 shows the basic idea of the substitute model.

Basic idea of substitute model
Instead of using complete drones, substitute structures with a defined mass- and burst load distribution are used. The substitute projectile consists of a substitute shell and any drone component. The substitute shell is a 3-D printed structure out of polylactide (PLA). Quasi-static investigations have shown that this material has comparable properties to polycarbonate (PC), which is used for the real drone shell. Different components can be placed within the substitute shell. It allows a simplified investigation of the component interaction and their influence on the contact force. Within this work, we focus on two motors within the substitute shell. The investigation of further components is possible, but it is out of the scope of this work.
3.6 Numerical models
Furthermore, numerical finite element (FE) models are developed to validate the drone strike model and for the investigation of further impact scenarios. We use the explicit solver Radioss. The preprocessing is done with Hypermesh, and the postprocessing is done with Hyperview and Python.
3.6.1 Model of single components
The FE model of the drone motor consists of five subcomponents: Case top- and bottom side, shaft, stator and magnets. All components are meshed with solid elements (/PROP/TYPE14). A standard 8-node solid element with full integration (H8C) is used. It is assumed that the outer shell of the motor is made of an aluminum-magnesium cast alloy (AlMg3), comparable to the ASSURE model of the DJI Phantom 3 motor. The stator of the electric motor is a M530-50A steel. The stator is wound with a coil of copper, which is neglected in the simulation model. ASSURE assumes that the motor shaft consists of aluminum cast alloy. Reverse engineering of the motor reveals that the shaft is made of steel. We assume a simple AISI 1006 steel, since the shaft has only a minor influence on the global deformation. The general contact /INTER/TYPE7 is used for contact modelling between the components. The Radioss TYPE7 contact is a general purpose contact. It models the contact between a main surface and a set of secondary nodes [32]. The model consists of 37,999 nodes and 25,056 elements and it is shown in Fig. 10. It has a mass of 42.3 g.

„FE model of an sUAV motor with corresponding materials” from [23]
The FE model of the substitute shell is a hollow body. 4 node shell elements are used to mesh the geometry. The model consists of 3038 nodes and 2992 elements. Its material is PLA. It has a thickness of 1.5 mm and a mass of 10.7 g. Figure 11a illustrates the substitute shell model, whereas (b) shows the complete substitute structure including the two motors. A global TYPE7 contact model is used. The components are validated on a quasi-static level (see [23]).

FE model of the substitute structure
3.6.2 Full-scale drone model
Finally, we will investigate and apply the DSM on a full-scale impact. This investigation is done with FEM. We use a model of a standard quadcopter drone [33]. It consists of the following five different components: 4 × motors, battery, top- and bottom shell and landing gear. The motor model is described above. Figure 12 presents the full drone model as well as the motor and the battery model. The battery model consists of the casing, the lithium-polymer cells, a printed circuit board and foam structures. All material models will be described in Chapter 3.6.4. Further components are neglected, because motors and battery can produce particularly high levels of damage as previous studies have shown (e.g. [26]). The mass of the neglected components is added to the mass of the drone shell by increasing its density. The full drone model consists of 272,170 nodes and 223,675 elements. The model has a total mass of 1380 g. A TYPE7 contact is used. [33]

"FE model of sUAV with detailed description of motor and battery model" from [33]
3.6.3 Target structures
FE models of both target structures are developed. The rigid target is shown in Fig. 13 and Fig. 14 presents the model of the deformable target structure. The rigid target consists of nine subcomponents with the following three material models: impact plate, four arms, a plate on the back, load cells with fixing bolts and adapter plates. The adapter plates, made out of S235 steel, are clamped at the corners. AISI 422 + s steel is used for the arms, the back plate and the impact plate. The impact plate is modelled with the Johnson–Cook approach. All other components use a purely elastic model. One arm consists of 801 fully integrated solid elements, the back plate is modelled with 851 shell elements and the adapter plates are meshed with 680 shell elements. The load cells are modelled with beam elements. The impact plate has 31,632 solid elements. The average element size is 6.3 mm. A global TYPE7 contact is used.

FE model of rigid target

FE model of Al2024-T3 target
In contrast with the rigid target, the support of the target structure must also be modelled for deformable targets. The picture frame as well as the base frame is made out of AISI 4140 with solid elements. The target material is Al2024-T3 and shell elements are used. All three components use the Johnson–Cook model. Further components like the support structure, the adapter plates and the load cells are made out of S235. The load cells are placed between base frame and adapter plates and modelled with beam elements. Beam- and RBE3 elements are used to model the bolt connections. The adapter plates are attached to the support structure and are modelled with solid elements. Shell elements are used for the support structure. The upper and lower sides of the target support structure are clamped (see Fig. 14). Only the Al2024-T3 target is in contact with the projectile. A mesh refinement study leads to an element size of 2.0 mm for the aluminum sample. Both target structures are validated with Dirac impact tests, as shown in [34].
We compare the DSM with a full-scale drone strike on a generic wing leading edge (WLE) in Chapter 5.3. It is a simplified model, which only describes the leading edge up to the first spar without the wing box (see Fig. 15a). It consists of the following: spar, skin and ribs. The boundary conditions and the dimensions are shown in Fig. 15b and c. Al2024-T3 is used for the skin. The ribs and the spar are made out of Al7075-T6. The ribs have a thickness of 2.0 mm, the spar has a thickness of 3.5 mm. The thickness of the skin is 1.6 mm. We use fully integrated shell elements to avoid hourglassing. Connector elements are used to connect the skin to the ribs. The contact is modelled with the TYPE7 global contact. This model consists of 426,945 shell elements and 428,830 nodes. [33]

a FE model of wing leading edge; b Boundary conditions; c Dimensions [33]
Two impact locations and two flight angles of the drone projectile are investigated, as shown in Fig. 16. We investigate the central impact on a rib (location = rib) and the impact between two ribs (location = skin). The flight angles of the drone are 0°, which means that one motor is in front, and 45°, which means that two motors are in front (see Fig. 16a and b).

Impact locations and flight orientations of the drone projectile [33]
3.6.4 Material models
AISI 1006, AlMg3, Al2024-T3 and AISI 4140 are modelled with the standard Johnson–Cook material model. This model was developed for isotropic materials and has the advantage that it includes strain rate dependency, plastic hardening and thermal softening in one Eq. (15). If the equivalent stress is lower than the yield stress, the material behaves linear elastic; otherwise, its behavior is plastic [32]. The yield stress \({\sigma }_{\text{y}}\) is calculated as follows:
The first term models the plastic hardening with the initial yield stress \(A\), the hardening coefficient \(B\) and the exponent \(n\). The second term describes the strain rate dependency with \(C\) as the strain rate coefficient and \({\dot{\varepsilon }}_{0}\) as the reference strain rate. The third term models the thermal softening. The parameter \(s\) is the softening exponent, \({T}_{0}\) is the reference temperature und \({T}_{\text{melt}}\) is the melting temperature. Anisotropic effects and damage propagation are not included. The used parameters are shown in Table 2. They are literature values.
We use the Johnson–Cook failure model for the materials AISI 1006, AlMg3 or Al2024-T3 (Eq. (16) and Eq. (17)). It is a cumulative damage law based on the plastic strain accumulation [32].
The values from \({D}_{1}\) to \({D}_{5}\) are empirically determined material parameters. Failure occurs if \(D=1\) and the elements are deleted. The value of \(\Delta \varepsilon\) is the increment of plastic strain during a load increment and \({\sigma }^{*}\) is the normalized mean stress. Components with the AISI 4140 material are not expected to reach their failure strain as they are not at risk of impact. The element is deleted if one integration point reaches the failure strain.
Radioss uses a lumped mass formulation. Within this solver, each node represents a discrete mass of zero size. If an element fails, its geometry and contact definitions are deleted [32]. Its mass is not deleted but it has no influence on the contact force after the element failed. Mass erosion does not occur and the equilibrium conditions are fulfilled.
If the Johnson–Cook parameters are unknown, Radioss offers the opportunity to calculate these values internally, based on the yield strength \({\sigma }_{\text{y}}\) and tension strength \({\sigma }_{\text{B}}\) as well as the elongation at break \({\varepsilon }_{\text{fail}}\). This method is used for M530-50A and AISI 422 + s with the following parameters (Table 3).
Polylactide, polycarbonate, Al7075-T6 and polyurethane, which is a foam used within the battery, are modelled with an elastic–plastic material model. The used material values are shown in the following Table 4.
The battery model follows the classic approach in the drone strike literature, that the model from Sahraei et al. [35] is used with data for the PCB from Gerardo et al. [11].
4 Validation of the DSM
Both analytic models are validated within this chapter. The model for soft impacts is validated with test and simulation data from impacts against a rigid wall, whereas the hard impact model is validated with test and simulation data from impacts against the Al2024-T3 target. A 4th order Butterworth low pass filter with a frequency of 1000 Hz is used to filter the FE results. The DSM results are unfiltered.
4.1 Validation of the model for soft impacts
The impact test K6 is considered for validation. We performed two simulations. The first without inclincations of the substitute projectile, whereas the projectile has inclinations in the second simulation. Figure 17 compares the impact process of the test and both simulations. The impact starts when the projectile has its first contact with the target at t = 0.0 ms. After 0.2 ms the first motor hits the target. The substitute shell between the two motors is compressed and develops cracks. These cracks can be seen within the tests and the simulations. The part behind the second motor has no visible damage. After 0.4 ms, the second motor hits the first motor during its rebound phase. This motor is compressed between the target and the second motor. Every part of the substitute shell shows cracks and starts fragmenting. During the further time steps, the motor is further compressed. The impact process has ended after 1.4 ms, because the remaining components of the projectile are in their rebound phase. Tests and simulations show a comparable impact behavior and the simulations can be assumed to be validated. FE models can be used for validation of the analytic model.

Comparison between test and simulation of the substitute structure during an impact on a rigid target with an initial velocity of 107.4 m/s
The mass distribution as well as the burst load distribution is needed as an input for the analytic model. Both distributions of the substitute shell are provided in Fig. 18. The mass distribution can be determined with a finite element preprocessor. The burst load distribution is based on the expected damage behavior. We expect a buckling behavior of the structure, what leads us to the distribution shown in Fig. 18b. The initial velocity is 107.4 m/s. The mass of the non-fragmenting component (motor) model is 42.3 g. Impact investigations of single motors have shown that the substitute stiffness \({k}_{\text{e}}\) is 12701.2 kN/m. The contact duration \({t}_{\text{f}}\) is 0.107 ms.

Mass- and burst load distribution
The calculations with these input parameters lead to the curve shown in Fig. 19a. The diagram also shows the test and simulation data. The test data show the expected two load peaks, but the second peak is larger than the first peak. This is implausible, as a reduction of the force is expected due to the decreasing impact velocity. The timing of the first peak shows good agreement with simulation data and analytics, whereas the second peak shows a deviation from these curves. The force values at the beginning and end of the test curve are also implausible, as they deviate from the expected value 0 N. The courses from the tests were determined from the high-speed videos. This measurement process was validated with an instrumented impact tower and low-velocity impacts. However, the recording frequency is too low to produce accurate results in case of high-velocity impacts. A force measurement with strain gauges could lead to better force signals. However, they are not used in these tests because they tend to detach on impact. The force data from impact tests are inaccurate and are not suitable for validating the DSM in this case.

Validation of calculation model with FEA data
Therefore, simulation data are used for comparison because it allows a more differentiated analyses of the results than the contact force determined from the test data. The simulation models are all validated with data from quasi-static compression tests (see [23]). The first load peak shows a good agreement with the simulation data. The damage of the projectile is not included in the calculation model which can explain deviations between the curves. Both curves show a second load peak. The peak of the analytic result has a delay of 0.24 ms compared to the FE result. The coefficient of determination \({R}^{2}\) has a value of 0.06, which is a not an acceptable result. The delay of the second peak can be explained by the basic aircraft impact model. This model determines the force at the interface between projectile and target. It assumes that the crushed mass does not sum up at the interface. However, the tests and simulations carried out show that the second motor hits the first motor, which produces a contact force at the interface between both. This has to be considered within the calculations by adjusting the local x-coordinate for the second impact. A plastic portion \({x}_{\text{plas}}\) is added to the x-coordinate. This portion describes the plastic deformation of the first motor after its impact. It can be calculated with models for plastic deformations during an impact, for example from Stronge [36]. This addition changes the second impact point and provides the analytic curve, as shown in Fig. 19b. The \({R}^{2}\) score improves from 0.06 to 0.84, which indicates a good agreement. The relative error between analytic calculation and FE simulation is 0.8% for the first load peak and 6.1% for the second load peak. These small deviations prove that the DSM can be used to determine the impact force for drone strikes on rigid targets or soft impacts, respectively.
4.2 Validation of the model for hard impacts
In case of a hard impact, the target deformations cannot be neglected. Projectile and target behavior are coupled. Equations (6), (7), (13) and (14) are used to determine the contact force–time history in this case.
Test K10 (see Table 1) is used for validation. Figure 20 compares the test with simulations of a perpendicular and an inclined impact. The impact starts at 0.0 ms. After 0.2 ms the substitute shell has distinct cracks, which do not appear within the simulation models. This stands in contrast to the results for the soft target, where the projectile develops cracks. We see that the material and damage model of the substitute structure cannot represent the test completely correctly. The implementation of a strain rate dependency will improve the model and the results. However, since the deformations and damages between test and simulation are comparable in the final state (t = 1.4 ms) and the proportion of the substitute shell on the contact force is negligibly small (see [27]) we use the FE model without a further improvement of the PLA material model. If the behavior of the motors is investigated, we see that the first motor hits the target at t = 0.2 ms. The second motor hits the first one at t = 0.6 ms. After 1.4 ms the impact process has ended.

Comparison of test and simulation of an impact of the substitute structure on an Al2024-T3 target with a velocity of 104.2 m/s
In contrast to the model for soft impacts, the following target properties are needed for the analytic calculation: Target mass \({m}_{\text{t}}\); target stiffness \({k}_{\text{t}}\) and damping \({c}_{\text{t}}\). The spring-mass model needs a substitute stiffness \({k}_{\text{e}}\) and the mass of the non-fragmenting component \({m}_{\text{pnf}}\) as well as the contact duration \({t}_{\text{f}}\). All parameter values are shown in Table 5. Mass and burst load distribution from Fig. 18 are used.
The model is validated with test and simulation data. We see the same shortcomings as for the rigid wall impacts. The force–time curves of test, simulation and analytic results are presented in Fig. 21. Test data are not plausible. They are recorded with a too low frequency. The impact process is recorded with 8 to 12 frames. The deceleration of the projectile is determined at these points and the contact force is interpolated between these points. We see a large deviation and do not further investigate the test data.

Force–time curves of test, simulation an analytic data for hard impacts on Al2024-T3 targets
The dashed line illustrates the FEA results. After an initial numerically induced deflection there is an increase in the impact force starting at t = 0.1 ms. This means, that the contact of the first motor starts at this time. The force maximum of the peak is 0.5% below the analytic result, which indicates a good and conservative result. Both curves show a second peak due to the impact of the rear motor. The impact times are in good agreement but the force maximum of the analytics is 12.3% below the simulation data. This deviation may be explained with the following points:
-
Due to the impact of the first motor there are plastic deformations of the target structure. This leads to a hardening and a larger force.
-
There is a superposition of waves within the target structure, induced by the former impact. At the time of the second impact, the target oscillates in the opposite direction to the projectile what increases the relative velocity. This larger velocity leads to an increase in the contact force.
The FE curve shows a third load peak. This peak is small compared to the former peaks. The analytic model does not show this peak. Within the simulations it can be seen that the target gets in contact with the projectile during the rebound phase. This leads to small relative velocity and the third load peak. The analytic approach is not developed to model such rebound impacts.
The value of the deviation between the maxima of the load peaks indicates a good agreement. However, it must be noted that the analytics underestimate the force in the case of the second impact and thus do not provide conservative results. Depending on the impact case considered, the values are above or below the comparative values of the simulations. The model thus provides an initial estimate of the force to be expected for the second impact, but this should not be used without further investigation.
5 Results
Finally, we investigate the drone strike model (DSM) on three application levels (see Fig. 22). On the first level the impact of a full-scale drone with a rigid target is investigated. Furthermore, we study the impact with a generic Al2024-T3 target. Finally, the DSM is compared with results of impact simulations between a drone and a generic wing leading edge (WLE). Four velocities are investigated. The lowest velocity (20 m/s) simulated is the maximum flight velocity of the drone (e. g. DJI Phantom 4). It simulates the impact on a hovering helicopter; for example. 80 m/s and 100 m/s are velocities that define the test range of the substitute structure (see Table 1). The maximum impact velocity 150 m/s is often used within the existing drone impact literature (e.g. [17]). Two flight orientations of the drone are modelled: 0° and 45°. In the 0° direction, one motor is in front of the drone and in the 45° direction, two motors hit simultaneously the targets. The impact location is varied on the third level. We investigate impacts centrally on a rib and impacts in the interspace between two ribs.

Investigation of drone impacts on three application levels
The following mass-and burst load distributions are used, as shown in Fig. 23. Both distributions depend on the impact angle \(\alpha\). The mass distribution is determined via the FE preprocessor Hypermesh and the burst load is determined via the yield strength of the main component material. This yield strength is reduced to ¼ its original value to also cover effects due to buckling and folding. This reduction factor is determined with reference [37]. This reference shows that the force needed for a yielding damage can be multiplied with ¼ to account for a folding damage.

Mass- and burst load distribution for full-scale drone
5.1 Full-scale soft impacts results
Drone impacts with rigid targets are soft impacts in all cases. This means, that only the projectile has to be modelled. In case of a full drone the shell and the battery show a fragmenting behavior, whereas solid components like the motors and the camera show a non-fragmenting impact behavior. The fragmenting behavior of the battery can be seen within the literature (e.g. [26]).The results for the 0° orientation are presented in Fig. 24. Figure 25 shows the results for the 45° orientation. The substitute stiffness for soft impacts is determined with single motor impact tests and simulations. We determined a substitute stiffness of \({k}_{\text{e}}\) = 12,701.2 kN/m.

Force–time curves of FEA and DSM for impacts with a 0° direction of the drone

Force–time curves of FEA and DSM for impacts with a 45° direction of the drone
The curves for 80 m/s, 100 m/s and 150 m/s agree very well. The coefficient of determination \({R}^{2}\) increases with increasing initial velocity up to 0.91 for the 0° orientation and up to 0.57 for the 45° orientation, respectively. Large deflections occur for an impact velocity of 20 m/s. The deviation of the load maxima is 26.7%. This deviation decreases to a value of 7.4% for an impact velocity of 150 m/s and the 0° orientation. A similar development can be seen within the diagrams for the 45° impact.
Several factors could explain the deviations. The substitute spring stiffness \({k}_{\text{e}}\) seems to be dependent from the impact velocity. Furthermore, the simplification to a 1-D line model neglects inertia effects. For larger velocities, they do not have enough time to fully develop what leads to a better agreement between the FEA and the analytic results. Finally, the calculation model has velocity limits, which will be discussed in Chapter 6.
5.2 Full-scale hard impacts
We assume for all investigated velocities hard impacts within this chapter. In contrast to the rigid target, the aluminum sample may develop damage during the impact process. The projectile may perforate the target. This indicates the need for an upper velocity limit, which is defined as the ballistic limit velocity \({v}_{50}\). This defines the velocity, where at least 50% of the targets show a perforation damage after the impact. The simulated Al2024-T3 target has a size of 500 × 500 × 2.54 mm and fully clamped edges. The same velocities and flight angles are studied as for the rigid target. We determined a substitute and a target spring stiffness of \({k}_{\text{e}}\) = 1111.2 kN/m.
As expected from the results for soft impacts, the lowest velocity develops large deviations compared to the simulation data. The coefficient of determination shows a value of – 2.7 (Fig. 26) and 0.04 (Fig. 27), respectively. The target shows small deformations and no damage. Increasing impact velocity leads to a better agreement between analytics and simulation data in case of a 0° orientation of the drone. The coefficient of determination is 0.59 for 80 m/s and 0.64 for 100 m/s. Deviations occur only in the area around the load maximum. The analytic force maximum is 31.4% and 41.9% below the comparative value. We assume that these large deviations occur due to neglecting of mass summation at the interface. The undamaged part of the projectile is assumed to be rigid. In reality there is a summation of internal drone components. These components hit the target together, what leads to larger impact forces. Furthermore, the battery model is not validated for impacts with deformable targets. This lack of validation may explain the deviations in the area around the drone center for both flight orientations. Further deviations can be explained with the simplified substitute stiffness \({k}_{\text{e}}\) in the analytic model. The underestimation of the force curve by the analytical model must be viewed critically. If the analytic model is used for a preliminary design, the structures can be undersized. In case of a crash, this can lead to a catastrophic accident. The model should not be used at this point without further validation through testing.

Drone impacts on Al2024-T3 with 0°

Drone impacts on Al2024-T3 with 45°
The curves change in case of the highest impact velocity of 150 m/s. This velocity leads on the one hand to a perforation of the aluminum sample. On the other hand, this damage reduces the contact force as it can be seen in Fig. 26d. Degradation and damage of the target is not included in the analytic model, what leads to these large deviations in this case. Comparable results are shown by the evaluation of the 45° impacts (see Fig. 27). The lowest velocity is below the lower velocity limit. The coefficient of determination is 0.27 for 80 m/s and 0.08 for 100 m/s. We see an acceptable agreement of the curves up to 1.0 m/s. After that time point deviations occur. The highest velocity produces a perforation damage, what explains the deviations in this case.
While the investigations with the substitute structures also provided good results for deformable target structures, greater deviations are shown in case of the drone. The DSM shows clear weaknesses here in the application to deformable structures in case of a full drone strike. The simplification of the drone to a 1-D model, the neglection of friction, damping, vibrations, plastic deformations and the use of a substitute spring stiffness are assumptions to explain the deviations and require more detailed investigations. The assumed spring stiffnesses seem to be too low and have to be determined anew for each projectile. In the analyses so far, the largest deviations occur in the area of the center of the drone and thus around the battery. The battery model is based on the quasi-static data, as no impact test data is available. The lack of validation of the battery model at the impact level is thus a further explanation for the deviations in the force–time curve of the full model at the application level.
In the overall context, the results so far mean that the more rigid the target structure, the higher the impact velocity and the lower the damage, the better the developed DSM works. If the DSM is applied to deformable structures (hard impact), the results must be viewed critically. They allow an initial statement on the force curve, but show strong deviations from the FE simulations. Purely on the basis of the analytical calculation, a prediction cannot be made at this point. A validation of the data through tests or simulations is required. However, the model is very well suited for preliminary load estimates. The qualitative curve is reproduced. The influence of design changes to drone architecture can be estimated quickly and easily without having to carry out time-consuming series of tests and simulations.
5.3 Application level
Within this chapter, the DSM results are compared with results from impact simulations with a generic wing leading edge. The WLE model from Chapter 3.6.3 is used. The same velocities as for the former investigation levels are studied. The flight orientation and the impact location along the WLE are varied, as described above.
In case of an impact on a rib, the spring stiffness is 3480.5 kN/m and in case of an impact between two ribs it is 237.1 kN/m. Both values are determined with preliminary impact simulations of a single motor impacting the WLE with a velocity of 100 m/s. The mass of the target is 17.64 kg. Due to the large mass of the target compared to the projectile, it can be assumed that the target stiffness and the substitute stiffness are equal (see [27]).
Figure 28 displays the central impact on a rib. As expected, the damage increases with greater impact speed. At 150 m/s the drone penetrates the leading edge of the wing on impact with the rib for both angles. The drone or its fragments hit the wing box, which in turn can lead to catastrophic damage. Lower velocities show no penetrations. However, the target structures show pronounced plastic deformations as well as cracks in the skin, which can affect the flight characteristics. The fragments of the drone are deflected along the WLE. At 20 m/s, the complete drone is deflected along the leading edge of the wing. The arms of the drone break, the WLE itself shows no pronounced damage. Based on the previous investigations, it was to be expected that the curves for 20 m/s do not show any agreement. The lower limit speed is not reached, which means that the DSM is not valid and the results do not allow any conclusions. For the higher speeds the force–time curves agree qualitatively. The force maxima of the curves occur at the same times, but show large differences in the values. At 80 m/s the coefficient of determination shows the best values for all simulations at the application level. This is because the WLE is not yet damaged and the impact is on a rib. For 100 m/s the difference is about 30 kN. For 150 m/s, however, the difference is 135 kN. The smallest deviation is 10.8% for 80 m/s and 45°. At this point, the same picture emerges as was already seen for the generic Al2024-T3 models. The largest deviations occur in the area of the drone center, which can be attributed to the incomplete validation of the battery model. For 150 m/s, the coefficient of determination shows large, negative values due to the damage to the WLE. Nevertheless, the DSM provides conservative values in this investigation and can be used for initial load estimations.

Central impact on a rib
The impact between two ribs shows greater damage compared to the central impact on one rib (see Fig. 29). Corresponding values are also shown by the coefficient of determination, indicating a poor agreement. Above 80 m/s, the skin of the leading edge of the wing tears in the 45° orientation. Correspondingly large damages develop at 150 m/s and 45°. Here the skin is completely torn open and the drone hits the spar. At 150 m/s, the drone also perforates the spar, regardless of orientation. Safe continued flight would not be guaranteed in these cases. This impact can produce catastrophic damage. Also, the drone penetrates the wing skin and impacts the spar with an impact velocity of 100 m/s. The damage pattern in this case is consistent with the University of Dayton test [14], where a DJI Phantom 3 was shot at a WLE with a velocity of 120 m/s. At 80 m/s, the skin tears, but the drone does not penetrate the wing. Fragments of the drone are deflected along the WLE. For the impact at 20 m/s minor damage is shown. The force–time histories show similar results as already the impact on the rib. The lowest velocity does not yield comparable curves. For higher speeds, the curves between DSM and FEA are qualitatively similar, but in some cases show large deviations in the absolute values. For 80 m/s, in contrast to the previous investigation, there are greater deviations for the 45° orientation. In the curves (e.g. for 150 m/s and 45°) differences of up to 200 kN occur. The large deviations in these cases can be attributed to penetration and perforation of the WLE. This also confirms at application level that if the target structure is damaged, the DSM fails and the deviations become too large. Compared to the impact tests with the generic aluminum plate, the leading edge of the wing is additionally curved. This curvature results in a deflection of the drone components along the target surface during the impact process. This effect is not modelled with the DSM and explains the overestimation of the FE results.

Impact on skin between two ribs
6 Discussion
The development and application of the DSM has shown that there are boundary velocities. The model is valid within a certain velocity range. Figure 30 illustrates a variation of the initial velocity within FEA and DSM for the impact of the substitute structure on Al2024-T3 to determine the valid velocity range. The study shows that the curves agree very well for velocities between 88 and 104.2 m/s. Higher and lower velocities show deviations.

Variation of the initial impact velocity for the impact of the substitute structure on Al2024-T3; Comparison between DSM and FEA
Based on these results, we define a valid velocity range for the DSM. The lower limit velocity can be determined with the energy needed to destroy the fragmenting part of the projectile. This energy can be determined via the integral of the burst load distribution along the length of the projectile as follows:
This boundary energy is set equal to the kinetic energy of the projectile. This allows the determination of the lower limit velocity \({v}_{\text{ls}}\):
The parameter \({m}_{\text{pf}}\) is the mass of the fragmenting part of the projectile. If this is applied to the substitute structure, the lower limit velocity is 82.5 m/s, what is in good agreement with the results shown in Fig. 30. The upper limit velocity is defined by the perforation of the target structure.
The validity range of the DSM is limited and depends on the behavior of the target, the projectile and the impact velocity. In case of a hard impact, the DSM can be used between the lower limit velocity \({v}_{\text{ls}}\) and the perforation velocity \({v}_{50}\). The range of validity of the DSM lies between these two velocities. Within this study, velocities up to 150 m/s were investigated. Impacts with higher speeds will be much more severe regarding failure mechanics and damage footprint. This applies to both target and projectile structure. Further investigations are needed to validate the DSM for higher velocities.
The current investigation assumes a stationary target. Only the projectile moves. This leads to a vast underestimation of the kinetic energy. The real energy distribution is that the projectile has a small amount of energy due to its small mass and velocity compared to the target. The target has a mass of several tons and in case of a commercial aircraft a velocity, that is much larger than the 20 m/s of the drone projectile. A drone impacting a large aircraft will not significantly decelerate the target aircraft. Based on this consideration, a further parameter study examines how the force curve changes when \({v}_{\text{i}}\) is constant. Figure 31 illustrates the results.

Change in relative velocity; a not constant, b constant
Due to the constant relative velocity in Fig. 31, two load peaks with the same height occur, as the deceleration of the replacement structure is omitted. The influence on the contact force at lower velocities should be emphasized. While the previous calculation model can only be used from a lower limit velocity, the constant relative velocity shows good agreement with the FE data even for lower velocities, e.g. 50 m/s. The impact times of the motors agree with the FE data. A further reduction of the relative velocity to, e.g. 22 m/s, also shows good agreement with regard to the impact time. Deviations appear in the load height of the second impact, which is above the force data, as well as in the impact duration. The advantage of the previous model of variable relative velocity is that the reduction of load peaks in a multi-body impact is represented. The approach of constant relative velocity over a moving projectile has to be validated using real or virtual tests, which goes beyond the focus of this work and is, therefore, not considered further. However, it does provide a starting point for investigating drone strikes at lower speeds.
A huge advantage of the model is the short calculation time and its simple implementation. It is implemented with a Python script and uses the Runge–Kutta method. It takes 20 s to determine the impact force. In comparison, a full-scale FE simulation needs more than 6 h. The model is a pragmatic approach. It can be used in the framework of a preliminary design to study effects of design changes and the influence of materials on the contact force. It can produce a first load estimation within a few seconds for a first orientation. It is especially helpful for drone manufactures for estimating the impact load if their drone model hits a manned aircraft. Aviation authorities plan to require drone manufactures to prove that certain forces will not be exceeded during a drone collision with a manned aircraft. The model can be used in this context to find a preliminary design with a minimized contact force. It cannot be used for a detailed impact optimized design of drones or corresponding targets.
7 Conclusion
This paper set out to develop an analytic model for the impact force of drone strikes with aircraft structures. This model should be used in the framework of a preliminary design phase of aircraft structures. The analysis is only valid for metallic structures. We investigate two overall impact cases, a soft impact as well as a hard impact. The target is considered rigid in case of a soft impact whereas the target can deform in case of a hard impact. The contact force for both impact cases can be determined with the developed drone strike model (DSM). This DSM is mainly a combination of the aircraft impact model and the spring-mass model for impacts. Dependent from the impact behavior of the single projectile components the aircraft impact model is used for fragmenting components and the spring mass model for non-fragmenting parts. The superpositioning of both along the appropriate locations leads to the DSM. The DSM is validated with impact tests. A substitute structure is used, consisting of a replacement shell and two motors. Impact tests are conducted on rigid targets and Al2024-T3 structures. Furthermore, the model is validated with explicit numerical impact simulations. On application level, the results show a very good agreement in case of a soft impact with a rigid target. Only small deviations occur. The force time curve is accurately represented. The DSM can be used for load estimation and the investigation of influence due to design changes to the contact force. Acceptable results are produced in case of a full impact with a generic Al2024-T3 structure. Damage of the target structure is not modelled, what leads to deviations between FEA and analytic data. Large deviations occur in case of a full-scale impact on a wing leading edge. Nevertheless, the model produces qualitatively comparable results, if the initial velocity is within the validity range. The model is investigated for velocities between 20 and 150 m/s. The advantages of the model are that it is simple, it provides a rapid load estimation and needs only a few input parameters. The best results are produced in case of an impact with a high velocity and a rigid target structure. These conservative results can be used within the preliminary design phase of an aircraft. Further research has to be done to implement a damage model for target structures and to validate the model with full-scale impact tests.
Availability of data and material
All relevant data are published within this paper.
Code availability
Not applicable.
Abbreviations
- α:
-
Flight orientation
- β:
-
Projectile inclination around its y-axis
- γ:
-
Target inclination around its y-axis
- ε:
-
Strain
- εfail :
-
Failure / maximum strain
- εp l :
-
Plastic strain
- ε ̇:
-
Strain rate
- ε ̇_0:
-
Reference strain rate
- ε ̇_“pl”:
-
Plastic strain rate
- μ:
-
Mass per unit length
- ν:
-
Poisson’s ratio
- ξ:
-
Target inclination around its z-axis
- ρ:
-
Density
- σ:
-
Strength
- σB :
-
Ultimate tensile strength
- σC :
-
Compressive strength
- σt,C :
-
Target compressive strength
- σy :
-
Yield strength
- a,b,c,n,s:
-
Johnson-Cook model parameters
- ct :
-
Target damping
- CS :
-
Shear strength
- D1D5 :
-
Damage parameters
- E:
-
Young’s modulus
- Eg :
-
Boundary energy
- h:
-
Thickness
- k:
-
Stiffness
- kb :
-
Bending stiffness
- kc :
-
Contact stiffness
- ke :
-
Substitute stiffness
- km :
-
Membrane stiffness
- ks :
-
Shear stiffness
- kt :
-
Target stiffness
- Lu :
-
Circumference
- m:
-
Mass
- mp :
-
Projectile mass
- mt :
-
Target mass
- mpf :
-
Mass of fragmenting projectile parts
- mpnf :
-
Mass of non-fragmenting projectile parts
- P:
-
Contact force
- Pc :
-
Burst load
- PFM :
-
Contact force from spring-mass-model
- R2 :
-
Coefficient of determination
- T:
-
Temperature
- T0 :
-
Reference Temperature
- Tmelt :
-
Melting temperature
- t:
-
Time
- t0 :
-
Reference time
- tf :
-
Impact duration
- v:
-
Velocity
- v50 :
-
Ballistic limit velocity
- vi :
-
Initial impact velocity
- vls :
-
Lower limit velocity
- x,y,z:
-
(cartesian) Coordinates
- xma, xme :
-
Position of non-fragmenting components along the projectile model
- xplas :
-
Plastic portion
- 1-D:
-
One – Dimensional
- AIM:
-
Aircraft Impact Model
- ASSURE:
-
Alliance for System Safety of UAS through Research Excellence
- CS:
-
Certification Specification
- DJI:
-
Da-Jiang Innovations Science and Technology Co., Ltd
- DoF:
-
Degree of Freedom
- DSM:
-
Drone Strike Model
- EASA:
-
European Union Aviation Safety Agency
- FAA:
-
Federal Aviation Administration
- FE:
-
Finite Element
- FEA:
-
Finite Element Analyses
- PC:
-
Polycarbonate
- PCB:
-
Printed Circuit Board
- PLA:
-
Polylactide
- sUAV:
-
Small Unmanned Aerial Vehicle
- UAV:
-
Unmanned Aerial Vehicle
- WLE:
-
Wing Leading Edge
References
Deutsche Flugsicherung: Sicherheit in der Luftfahrt. Gemeldete Behinderungen des Luftverkehrs durch zivile Drohnen in Deutschland in den Jahren 2015 bis 2020. https://de.statista.com/statistik/daten/studie/655281/umfrage/behinderungen-des-luftverkehrs-durch-zivile-drohnen-in-deutschland/ (2021). Accessed 29 October 2021
UK Airprox Board: Drones | UK Airprox Board. https://www.airproxboard.org.uk/Topical-issues-and-themes/Drones/. Accessed 29 October 2021
Radi, A.: Potential damage assessment of a mid-air collision with a small UAV. Civil aviation Safety authority (2013)
Gettinger, D., Michel, A.H.: Drone sightings and close encounters: an analysis. https://dronecenter.bard.edu/files/2015/12/12-11-Drone-Sightings-and-Close-Encounters.pdf (2015). Accessed 10 May 2021
Mackay, S.: Engineering researchers seek remedies for threat posed by drones to commercial airliners. https://vtx.vt.edu/articles/2015/10/102815-engineering-jetenginedronestrike.html (2015)
Song, Y., Schroeder, K., Horton, B., Bayandor, J.: Advanced propulsion collision damage due to unmanned aerial system ingestion. In: 30th congress of the international council of the aeronautical sciences. 30th congress of the international council of the aeronautical sciences, Seoul, 25–30.09.2016 (2016)
Song, Y., Horton, B., Bayandor, J.: Investigation of UAS ingestion into high-bypass engines, part 1. Bird vs. Drone. In: 58th AIAA/ASCE/AHS/ASC structures, structural dynamics, and materials conference. AIAA SciTech forum. American institute of aeronautics and astronautics (2017)
Schroeder, K., Song, Y., Horton, B., Bayandor, J.: Investigation of UAS ingestion into high-bypass engines, part 2. Parametric drone study. In: 58th AIAA/ASCE/AHS/ASC structures, structural dynamics, and materials conference. AIAA SciTech forum. American institute of aeronautics and astronautics (2017)
American institute of aeronautics and astronautics: Aerospace America. Close encounters of the drone kind. http://prod-staging.aiaa.org/docs/default-source/uploadedfiles/publications/aerospace-america-november-2015.pdf?sfvrsn=b0ee69fa_0 (2015). Accessed 28 June 2022
Cairns, S.D., Wood, L.A., Johnson, G.: Volume I - UAS airborne collision severity - projectile and target definition. Federal aviation administration. https://www.assureuas.org/projects/completed/a3/Volume%20I%20UAS%20Airborne%20Collision%20Severity%20Projectile%20and%20Target%20Definition.pdf (2016). Accessed 10 September 2020
Gerardo, O., Gomez, L., Espinosa, J., Baldridge, R., Zinzuwadia, C., Aldag, T.: Volume II - UAS airborne collision severity evaluation. Quadrocopter. UAS airborne collision severity evaluation, 2. FAA, Springfield. https://www.assureuas.org/projects/completed/a3/Volume%20II%20-%20UAS%20Airborne%20Collision%20Severity%20Evaluation%20-%20Quadcopter.pdf (2017). Accessed 29 November 2017
Gerardo, O., Lacy, T., Gomez, L., Espinosa, J., Baldridge, R., Zinzuwadia, C., Aldag, T., Kota, K.R., Ricks, T., Jayakody, N.: Volume III - UAS Airborne collision severity evaluation. Fixed-wing. UAS airborne collision severity evaluation. FAA, Springfield. https://www.assureuas.org/projects/completed/a3/Volume%20III%20-%20UAS%20Airborne%20Collision%20Severity%20Evaluation%20-%20Fixed-wing.pdf (2017). Accessed 29 November 2017
D'Souza, K., Lyons, T., Lacy, T., Kota, K.R.: Volume IV - UAS airborne collision severity evaluation. Engine ingestion. UAS airborne collision severity evaluation. FAA, Springfield. https://www.assureuas.org/projects/completed/a3/Volume%20IV%20-%20UAS%20Airborne%20Collision%20Severity%20Evaluation%20-%20Engine%20Ingestion.pdf (2017). Accessed 29 November 2017
University of Dayton: Risk in the Sky? (2018)
Wang, Y.-H., Wu, Z.-J., Yang, M.: The damage prediction and simulation for the UAV and Birdstrike impact on wing. Comput. Simul. 42–45, 83 (2018)
Meng, X., Sun, Y., Yu, J., Tang, Z., Liu, J., Suo, T., Li, Y.: Dynamic response of the horizontal stabilizer during UAS airborne collision. Int. J. Impact Eng (2019). https://doi.org/10.1016/j.ijimpeng.2018.11.015
Lu, X., Liu, X., Li, Y., Zhang, Y., Zuo, H.: Simulations of airborne collisions between drones and an aircraft windshield. Aerosp. Sci. Technol. (2020). https://doi.org/10.1016/j.ast.2020.105713
Lu, X., Liu, X., Zhang, Y., Li, Y., Zuo, H.: Simulation of airborne collision between a drone and an aircraft nose. Aerosp. Sci. Technol. (2021). https://doi.org/10.1016/j.ast.2021.107078
Franke, F., Schwab, M., Engleder, A., Burger, U.: Impact scenarios for collisions with unmanned aerial vehicles and their consequences to rotorcraft. In: 44th European Rotorcraft Forum. European Rotorcraft Forum, Delft, 18–21.09.2018 (2018)
Jonkheijm, L., Chen, B., Schuurman, M.J.: Predicting helicopter damage caused by a collision with an unmanned aerial system using explicit finite element analysis. In: AIAA (ed.) AIAA SCITECH 2022 Forum. AIAA SCITECH 2022 Forum, San Diego, CA & Virtual, 3.-7.1.2022. American institute of aeronautics and astronautics, Reston, Virginia (2022). https://doi.org/10.2514/6.2022-1486
Ritt, S.A., Höfer, F., Oswald, J., Schlie, D.: Drone Strike on a helicoper canopy demonstrator. in: royal aeronautical society (ed.) Proceedings of the 47th European rotorcraft forum. 47th European rotorcraft forum, Virtual, 7.9.2021–9.9.2021 (2021)
Slowik, T.: Finite-Element-Analysen von Drohnenschlägen auf Luftfahrzeugbauteile. Masterarbeit, Technische Hochschule Ingolstadt (2021)
Franke, F., Burger, U., Hühne, C.: Investigation of Impacts between unmanned aerial vehicle motors and various targets. In: Proceedings of the 2nd aerospace Europe conference. 2nd aerospace Europe conference, Warschau, 23.11–26.11.2021 (2021)
Olsson, R.: Impact response of composite laminates - a guide to closed form solutions. https://www.researchgate.net/publication/331634021_Impact_response_of_composite_laminates_-_a_guide_to_closed_form_solutions (1993). Accessed 13 July 2020
Abrate, S.: Modeling of impacts on composite structures. Compos. Struct. (2001). https://doi.org/10.1016/S0263-8223(00)00138-0
May, M., Jung, M., Pfaff, J., Schopferer, S., Schaufelberger, B., Matura, P., Imbert, M.: Vulnerability of aerostructures to drone impact – characterization of critical drone components. In: AIAA (ed.) AIAA SCITECH 2022 Forum. AIAA SCITECH 2022 Forum, San Diego, CA & Virtual, 3.-7.1.2022. American institute of aeronautics and astronautics, Reston, Virginia (2022). https://doi.org/10.2514/6.2022-0870
Franke, F., Schwab, M., Burger, U., Hühne, C.: An analytical model to determine the impact force of drone strikes. CEAS Aeronaut J (2022). https://doi.org/10.1007/s13272-021-00552-4
Riera, J.D.: On the stress analysis of structures subjected to aircraft impact forces. Nucl. Eng. Des. (1968). https://doi.org/10.1016/0029-5493(68)90039-3
Laczák, L.E., Károlyi, G.: On the impact of a rigid–plastic missile into rigid or elastic target. Int. J. Non-Linear Mech. (2017). https://doi.org/10.1016/j.ijnonlinmec.2017.01.020
Kœchlin, P., Potapov, S.: Classification of soft and hard impacts - application to aircraft crash. Nucl. Eng. Des. (2009). https://doi.org/10.1016/j.nucengdes.2008.10.016
Buyuk, M., Kan, S., Loikkanen, M.J.: Explicit Finite Element Analysis of 2024-T3/T351 Aluminum Material under Impact Loading for Airplane Engine Containment and Fragment Shielding. In: Binienda, W.K. (ed.) Earth & space 2008. Engineering, science, construction, and operations in challenging environments ; March 3 - 5, 2008, Long Beach, California ; proceedings of the Eleventh Biennial ASCE Aerospace Division International Conference on Engineering, Science, Construction, and Operations in Challenging Environments ; 3rd NASA/ARO/ASCE Workshop on Granular Materials in Lunar and Martial Exploration. 11th Biennial ASCE Aerospace Division International Conference on Engineering, Science, Construction, and Operations in Challenging Environments, Long Beach, California, United States, March 3–5, 2008, pp. 1–15. ASCE Publ, Reston, Va. (2008). https://doi.org/10.1061/40988(323)76
Altair Hyperworks: Radioss User Guide (2019)
Franke, F., Slowik, T., Burger, U., Hühne, C.: Numerical Investigation of Drone Strikes with Various Aircraft Targets. In: AIAA (ed.) AIAA SCITECH 2022 Forum. AIAA SCITECH 2022 Forum, San Diego, CA & Virtual, 3.-7.1.2022. American institute of aeronautics and astronautics, Reston, Virginia (2022). https://doi.org/10.2514/6.2022-2603
Franke, F., Schwab, M., Steinberger, F., Burger, U.: 3. Zwischenbericht zum Projekt Drone Strike on Aircraft - Research (DESIRE). Technische Hochschule Ingolstadt (2022)
Sahraei, E., Hill, R., Wierzbicki, T.: Calibration and finite element simulation of pouch lithium-ion batteries for mechanical integrity. J. Power Sources (2012). https://doi.org/10.1016/j.jpowsour.2011.10.094
Stronge, W.J.: Impact Mechanics. Cambridge University Press, Cambridge (2000)
Ruch, D.: Bestimmung der Last-Zeit-Funktion beim Aufprall flüssigkeitsgefüllter Stoßkörper. Dissertation, Karlsruher Institut für Technologie (2010). Accessed 4 March 2019
Acknowledgements
Open Access funding provided by Project DEAL.
Funding
Open Access funding enabled and organized by Projekt DEAL. This research work is financed by the German Federal Ministry of Education and Research within the funding program “Forschung an Fachhochschulen” under the contract sign DESIRE – 13FH581IX6.
Author information
Authors and Affiliations
Contributions
All authors contributed to the study conception and design. Material preparation, data collection and analysis were performed by FF. The first draft of the manuscript was written by FF and all authors commented on previous versions of the manuscript. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Franke, F., Burger, U. & Hühne, C. A novel reduced order model for drone impacts with aircraft structures. CEAS Aeronaut J 14, 381–412 (2023). https://doi.org/10.1007/s13272-023-00646-1
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s13272-023-00646-1