
Abstract
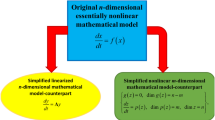
The objective of the paper is to investigate the controllability of longitudinal maneuvering of a thrust-vectored aircraft and its interaction with wide-sense robustness provided by the corresponding control laws. We deal with two types of controllability: exact and approximate. The set of attainability is constructed and analyzed. The used mathematical tool is the canonical form of Lyapunov’s second method. The detailed demonstration of the elaborated technique of designing wide-sense robust tracking control for the nonlinear five-dimensional mathematical model constitutes the ancillary quintessence of the paper. The framework of the two-stage cascade consisting of two controlling attractor-mediators and two controlling terminal attractors embedded in the extended phase space of the mathematical model of the thrust-vectored aircraft longitudinal motion is studied. The hierarchal master-minion structure of the first stage of the cascade has been found and examined. The two types of topological obstructions to controllability are identified in the mathematical model, namely dimensionality restriction and domain restrictions. We evaluate the gravity of their impact on controllability and the set of attainability. It is concluded that wide-sense robustness cooperates with tracking control laws in attaining the control aims under unfavorable factors acting on the thrust-vectored aircraft.














Similar content being viewed by others
References
Sparavalo, M.K.: Adequate mathematical modelling by wide-sense robust control design in a thrust-vectored flight dynamics problem. CEAS. Aeronaut. J. 11, 289–301 (2020). https://doi.org/10.1007/s13272-019-00425-x
Martynyuk-Chernienko, Y.A.: Application of the canonical Lyapunov function in the theory of stability of uncertain systems. Int. Appl. Mech. 36, 1112–1118 (2000). https://doi.org/10.1023/A:1026621319709
Schwartz, C.A., Yan, A.: Construction of Lyapunov functions for nonlinear systems using normal forms. J. Math. Anal. Appl. 216, 521–535 (1997)
Ruo-Shi, Y., Yi-An, M., Bo, Y., Ping, A.: Lyapunov function as potential function: a dynamical equivalence. Chin. Phys. B. 23, 010505 (2013)
Galperin, E.A.: Some generalizations of Lyapunov’s approach to stability and control. Nonlinear. Dynam. Syst. Theory. 2(1), 1–23 (2002)
Szydłowski, M., Krawiec, A.: Lyapunov function for cosmological dynamical system. Demonstr. Math. 50, 51–55 (2017). https://doi.org/10.1515/dema-2017-0005
Giesl, P., Hafstein, S.: Review on computational methods for Lyapunov functions. Discrete. Contin. Dynam. Syst. B. 20(8), 2291–2331 (2015). https://doi.org/10.3934/dcdsb.2015.20.2291
Dos Santos, V., Bastin, G., Coron, J.-M., d’Andréa-Novel, B.: Boundary control of systems of conservation laws: Lyapunov stability with integral actions. IFAC. Proc. Vol. 40(12), 312–317 (2007). https://doi.org/10.3182/20070822-3-ZA-2920.00052
Sparavalo, M.K.: The Lyapunov concept of stability from the standpoint of poincare approach: general procedure of utilization of lyapunov functions for non-linear non-autonomous parametric differential inclusions. Preprint at arxiv:1403.5761 (2014)
Sparavalo, M.K.: A method of goal-oriented formation of the local topological structure of co-dimension one foliations for dynamic systems with control. J. Automat. Inform. Sci. 25(5), 65–71 (1993)
Vorotnikov, V.I.: Partial stability and control. Birkhäuser (1998). https://doi.org/10.1007/978-1-4612-4150-8
Rumyantsev, V.V.: On the stability of motion with respect to part of the variables, Vestnik Moskov. Univ. Ser. Mat. Mekh. Fiz. Astron. Khim. 4, 9–16 (1957)
Lions, J.L.: Exact controllability, stabilization and perturbations for distributed systems. SIAM. Rev. 30(1), 1–68 (1988). https://doi.org/10.1137/1030001
Zuazua, E.: Controllability and observability of partial differential equations: some results and open problems. Handb. Differ. Equ. 3, 527–621 (2007). https://doi.org/10.1016/S1874-5717(07)80010-7
Sparavalo, M.K.: Wide-Sense robust and stable in the large terminal control for Van Der Pol dynamics. In: Poincaré’s-Approach-Based Backstepping Method Procedia Engineering (X International Conference on Structural Dynamics, EURODYN 2017), vol. 199, pp. 850–856 (2017). https://doi.org/10.1016/j.proeng.2017.09.021
Andronov, A.A., Pontryagin, L.S.: Course systems. Dokl. Akad. Nauk 14(5), 247–250 (1937)
Yakubovich, V.A.: On a method of adaptive control under conditions of great uncertainty. IFAC Proc. Volumes. 5(1), 415–420. https://doi.org/10.1016/S1474-6670(17)68436-2
Safonov, M.G.: Stability and robustness of multivariable feedback systems. MIT Press, Cambridge, MA, 1980. Based on author’s PhD Thesis, Robustness and Stability Aspects of Stochastic Multivariable Feedback System Design, MIT (1977)
Tsypkin, Ya.Z., Polyak, B.T.: Robust stability of a class of systems with distributed parameters. Dokl. Akad. Nauk. 341(4), 463–465. http://mi.mathnet.ru/eng/dan/v341/i4/p463
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The author declares that he has no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Sparavalo, M.K. Controllability versus wide-sense robustness in thrust-vectored flight dynamics and control: canonical Lyapunov’s second method approach. CEAS Aeronaut J 12, 723–736 (2021). https://doi.org/10.1007/s13272-021-00526-6
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s13272-021-00526-6