
Abstract
A novel model of a nonlocal magneto-thermoelastic porous solid in the context of the three-phase-lag model with a memory-dependent derivative is introduced. The effect of a magnetic field on a nonlocal thermoelastic porous medium in the context of a three-phase-lag model with memory-dependent derivatives was studied. The normal mode analysis is used to solve the problem of an isothermal boundary to obtain the exact expressions of physical fields. The numerical results are represented to estimate the effects of the magnetic field, time delay, and the nonlocal parameter on the behavior of all of the field variables such as temperature, displacement, and stresses. Comparisons are given for the results in the absence and presence of the magnetic field as well as the locality. Comparisons are also given for the results for different values of time delay. To the best of the author’s knowledge, this model is reported for the first time. Some particular cases are also deduced from the present investigation.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
The memory-dependent derivative (MDD) can be defined as the integral form over a sliding interval of a common derivative with a selected kernel function. This definition is better than the definition of fractional differentiation to reverse the influence of memory. There are several interesting phenomena, especially physical ones that have so-called memory-dependent influences, and this means that their current state depends not only on the position and the time but also on the previous cases. The definition of memory-dependent derivatives was introduced by Wang and Li [1]. An interesting application of MDD is given by Yu et al. [2]. They introduced the MDD instead of fractional calculus into the rate of heat flux in the Lord–Shulman model of generalized thermoelasticity. A model of two-temperature thermoelasticity theory with time delay and Taylor theorem with memory-dependent derivatives involving two temperatures was introduced by Ezzat et al. [3]. The mathematical model of thermoelectric visco-elastic materials with memory-dependent derivatives was proposed by Ezzat et al. [4]. Based on the generalized thermoelastic diffusion theory with memory-dependent derivative in both the generalized heat conduction law and the generalized diffusion law, the transient response is investigated by Li and He [5]. Very recently, several problems in generalized thermo-elasticity in the context of memory-dependent derivatives have been reported in the studies [6,7,8,9,10,11,12,13].
Magneto-thermo-elasticity, which deals with the interactions among strain, temperature, and electromagnetic fields, has drawn the attention of many researchers, because of the extensive uses in diverse fields, especially, geophysics for understanding the effect of the earth’s magnetic field on seismic waves, damping of acoustic waves in a magnetic field, the emission of electromagnetic radiations from nuclear devices, development of a highly sensitive superconducting magnetometer, electrical power engineering, optics, etc. The problem of generalized electro-magneto-thermoelastic plane waves in a finite conductivity half-space with one relaxation time was discussed by Othman [14]. A novel model of the two-temperature generalized magneto-viscoelasticity with two relaxation times in a perfect conducting medium is established by Ezzat et al. [15]. The reflection and transmission of the thermoelastic wave at a solid–liquid interface in the presence of initial stress and magnetic field in the context of Green-Lindsay model was discussed by Abo-Dahab and Abd-Alla [16]. The three-phase-lag model and Green–Naghdi theory without energy dissipation to study the effect of the gravity field and a magnetic field on wave propagations in a generalized thermoelastic problem for a medium with an internal heat source was applied as Said [17]. The effect of Thomson and initial stress in a thermo-porous elastic solid under Green-Naghdi electromagnetic theory was investigated by Abd-Elaziz et al. [18]. The effect of hydrostatic initial stress, gravity, and magnetic field in a fiber-reinforced thermoelastic solid with variable thermal conductivity was investigated by Said and Othman [19]. A dual-phase-lag model to discuss the effect of a magnetic field on thermoelastic micro-elongated solid with diffusion was applied by Alharbi et al. [20]. The literature Refs. [21,22,23,24,25] contains a wealth of studies on magneto-thermoelastic materials.
The theory of linear elastic materials with voids is one of the most significant generalizations of the classical theory of elasticity. This theory examines various types of geological and biological materials in order to fill the gaps left by the classical theory of elasticity and is concerned with materials that have a distribution of small (porous) voids. Iesan [26] discussed a hypothesis of thermoelastic materials with voids and without energy dissipation. The nonlinear theory of non-simple thermoelastic materials with voids was explored by Ciarletta and Scalia [27].The literature Refs. [28,29,30,31,32] contains a wealth of studies on porous thermoelastic materials.
Numerous authors have taken an interest in the theory of nonlocal elasticity as a result of its early success in resolving a long-standing issue in fracture mechanics. Based on the nonlocal thermoelasticity hypothesis, Inan and Eringen [33] looked into thermoelastic wave propagation in plates. By contrasting numerous results of both theories, Artan [34] demonstrated the superiority of the nonlocal theory. The literature Refs. [35,36,37,38,39] contains a wealth of studies on the nonlocal thermoelastic theory.
In the present study, the effect of a magnetic field on a nonlocal thermoelastic porous solid in the context of the three-phase-lag model with a memory-dependent derivative is discussed. The resulting non-dimensional equations are solved using normal mode analysis. A comparison is carried out between the considered variables in the absence and presence of the magnetic field as well as the locality. Comparisons are also given for the results for different values of time delay. Three-phase-lag model is very useful in the problems of nuclear boiling, exothermic catalytic reactions, phonon-electron interactions, phonon-scattering, etc. The numerical results are represented to estimate the effects of the magnetic field, time delay, and the nonlocal parameter on the behavior of all of the field variables such as temperature, displacement, and stresses. It is clear that the locality, time delay, and magnetic field have played a major role in the physical fields.
2 Formulation of the problem and basic equations
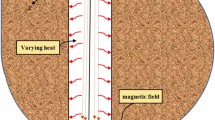
The problem of a nonlocal thermoelastic porous medium half-space \((x \ge 0)\) was considered. A magnetic field with a constant intensity \({\varvec{H}} = (0,\,0,\,H_{0} ),\) is acting parallel to the boundary plane. The displacement vector (Fig. 1)

Geometry of the problem
The constitutive equations as Hetnarski and Eslami [40], Eringen et al. [41, 42], Inan and Eringen [33], and Wang and Dhaliwal [43]:
where \(\varepsilon = a_{0} \,e_{0}\) is the elastic nonlocal parameter having a dimension of length, \(a_{0} ,\,\,e_{0}\) respectively, are an internal characteristic length and a material constant, \(\sigma_{ij}\) are the components of stress, \(e_{ij}\) are the components of strain, \(e_{kk}\) is the dilatation, \(\lambda ,\mu\) are elastic constants, \(\alpha_{t}\) is the thermal expansion coefficient, \(\theta = T - T_{0} ,\) where \(T\) is the temperature above the reference temperature \(T_{0} ,\) \(\varphi\) is the change in volume fraction field of voids, \(\delta_{ij}\) is the Kronecker's delta.
The equations of motion
where \(\beta ,\,\;b,\,\;\alpha_{1} ,\;\alpha_{2} ,\,\;\alpha_{3} ,\,\;\alpha_{4}\) are the material constants due to the presence of voids and \(\mu_{0} \,{(}{\varvec{J}}\, \times \,{\varvec{H}}\,{)}_{{\text{i}}}\) is Lorentz force due to the presence of a magnetic field.
The variation of the magnetic and electric fields is perfectly conducting slowly moving medium and are given by Maxwell’s equation: as Said [17],
where \(\mu_{0}\) is the magnetic permeability, \(\varepsilon_{0}\) is the electric permeability, \({\varvec{J}}\) is the current density vector, \(\dot{\user2{u}}\) is the particle velocity of the medium, and the small effect of the temperature gradient on \({\varvec{J}}\) is also ignored. Expressing the components of the vector \({\varvec{J}}\) in terms of displacement by eliminating the quantities \({\varvec{h}}\) and \({\varvec{E}}\) from Eq. (5), thus yield:
Substituting Eq. (6) into Eq. (3), we get
The heat conduction equation as Purkait et al. [44] and Choudhuri [45]:
where \(K^{*}\) is the coefficient of thermal conductivity, \(K\) is the additional material constant, \(C_{E}\) is the specific heat at constant strain, \(\tau_{\nu }\) is the phase-lag of thermal displacement gradient, \(\tau_{\theta }\) is the phase-lag of temperature gradient and \(\tau_{q}\) is the phase-lag of heat flux.
\(D_{{_{{w_{i} }} }}\) is the memory-dependent derivative operator defined as
The parameter \(w_{i}\) is the time delay and \(L\,(t - \xi )\) is the kernel function in which they can be chosen freely, see Caputo and Mainardi [46,47,48] for more explanations. In our present study, we choose \(L\,(t - \xi )\) in the following form \(L(t - \xi ) = A + B\,(t - \xi ).\,\)
Introducing Eqs. (2) and (7) in Eqs. (3), we get
For convenience, the following non-dimensional variables are used:
Using the above non-dimension variables, then employing \(h = - \;H_{0} \,e,\)
where \(A_{i}\) are given in the Appendix.
3 The analytical solution to the problem
The solution of the considered physical variable can be decomposed in terms of normal mode analysis as:
where \(u^{*} (x),\) etc. is the amplitude of the function \(u(x,y,\,t)\) etc., \({\text{i}}\) is the imaginary unit, \(m\) is the complex frequency and \(a\) is the wave number in the \(y -\) direction.
Eliminating \(v^{*} (x),\;\theta^{*} (x)\) and \(\varphi^{*} (x)\) between Eqs. (18) – (21), the following ten-order ordinary differential equation satisfied by \(u^{*} (x),\;v^{*} (x),\;\theta^{*} (x),\;\varphi^{*} (x)\) can be obtained:
where \(H_{1} ,H_{2} ,H_{3} ,H_{4} ,H_{5}\) are given in the Appendix.
Equation (22) can be factored as
where \(k_{n}^{2} \,(\,n = 1,\,2,\,3,\,4\,,5)\) are the five roots of the following characteristic equation:
The solution of Eq. (22), bounded as \(x \to \infty ,\) can be expressed as:
Using the above equations, we get
where \(R_{in}\) are given in the Appendix.
4 Boundary conditions
In the physical problem, we should suppress the positive exponentials that are unbounded at infinity. The constants \(G_{n} \,\,{(}n = {1,2,3,4,5)}\) have been chosen such that the boundary conditions on the surface at \(x = 0\) as Abbas et al. [49]:
where \(f_{0}\) are constants and \(G(y,t)\) are arbitraries functions.
Substituting the expressions of the variables considered into the above boundary conditions, we can obtain the following equations satisfied by the parameters:
Solving the above system of Eqs. (32), we obtain a system of five equations. After applying the inverse of the matrix method, we have the values of the five constants \(G_{n} ,\,\,{(}\;n = {1,2,3,4,5)}\,,\) hence; we obtain the expressions of displacements, the thermal temperature, and the stress components.
5 Special cases
-
(a)
Equations of the 3PHL model when, \(K,\tau_{T} ,\,\tau_{q} ,\,\tau_{\nu } > 0\) and the solutions are always (exponentially) stable if \(\frac{{2K\tau_{T} }}{{\tau_{q} }}\, > \tau_{\nu }^{*} > K^{*} \tau_{q}\) as in Quintanilla and Racke [50].
-
(b)
Equations of the GN-II theory without energy dissipation when, \(K = \tau_{T} = \,\tau_{q} = \,\tau_{\nu } = 0\).
-
(c)
Equations of the GN-III theory with energy dissipation when, \(\tau_{T} = \,\tau_{q} = \,\tau_{\nu } = 0.\)
-
(d)
The corresponding equations for local thermoelastic porous solid without the influence of the magnetic field from the above-mentioned cases by taking \(H_{0} = 0,\) then we have \(A_{4} = N_{1} = N_{4} = N_{8} = 0,\) thus we have
$$ [N_{3} - N_{2} {\text{D}}^{2} ]\,u^{*} - N_{5} {\text{D}}\,v^{*} + {\text{D}}\,\theta^{*} - A_{6} {\text{D}}\,\phi^{*} = 0, $$(32)$$ N_{9} \,{\text{D}}\,u^{*} - [N_{6} - N_{7} {\text{D}}^{2} ]\,v^{*} - {\text{i}}\,a\,\theta^{*} + {\text{i}}\,aA_{6} \,\varphi^{*} = 0, $$(33)$$ A_{11} \,{\text{D}}\,u^{*} + {\text{i}}\,aA_{11} \,v^{*} - A_{14} \,\theta^{*} - [N_{10} {\text{D}}^{2} - N_{11} ]\,\varphi^{*} = 0, $$(34)$$ N_{21} \,{\text{D}}\,u^{*} + {\text{i}}\,aN_{12} v^{*} - [N_{14} {\text{D}}^{2} - N_{15} ]\,\,\theta^{*} + N_{13} \,\varphi^{*} = 0, $$(35)
where \(N_{i} ^{\prime}s\) are given in the Appendix and \(\,{\text{D}} = \frac{{\text{d}}}{{{\text{dx}}}}.\)
Eliminating \(v^{*} (x),\;\theta^{*} (x)\) and \(\varphi^{*} (x)\) between Eqs. (32) – (35), the following ten-order ordinary differential equation satisfied by \(u^{*} (x),\;v^{*} (x),\;\theta^{*} (x),\;\varphi^{*} (x)\) can be obtained:
where \(C,E,F,J\) are given in the Appendix.
Equation (36) can be factored as
where \(f_{n}^{2} \,(\,n = 1,\,2,\,3,\,4\,)\) are the roots of the characteristic equation
The solution of Eq. (37), bounded as \(x \to \infty ,\) can be expressed as:
Using the above equations, we get
where \(M_{in}\) are given in the Appendix.
6 Boundary conditions
In the physical problem, we should suppress the positive exponentials that are unbounded at infinity. The constants \(Q_{n} \,\,{(}n = {1,2,3,4)}\) have been chosen such that the boundary conditions on the surface at \(x = 0\) as follows:
where \(f_{0}\) are constants and \(Q(y,t)\) are arbitraries functions.
Substituting the expressions of the variables considered into the above boundary conditions, we can obtain the following equations satisfied by the parameters:
Solving the above system of Eqs. (45), we obtain a system of four equations. After applying the inverse of the matrix method, we have the values of the five constants \(Q_{n} ,\,\,{(}\;n = {1,2,3,4)}\,{.}\) Hence, we obtain the expressions of displacements, the thermal temperature, and the stress components.
7 Numerical results and discussion
In order to clarify the theoretical results obtained in the preceding section and compare these in the context of the three-phase-lag (3PHL) model, and study the effect of the magnetic field, nonlocal parameter, and memory-dependent derivative on a porous thermoelastic medium, we now present some numerical results for the physical constants
Figures 2, 3, 4, 5, 6 are graphed to describe the variation in the displacement component \(v,\) the thermodynamic temperature \(\theta ,\) the change in the volume fraction field \(\varphi\) and the stress components \(\sigma_{xx} ,\;\sigma_{xy}\) with different values of \(\varepsilon = 0.5,0.3,0.01\) (nonlocal parameter).

Vertical displacement distribution \(v\) for different values of nonlocal parameter

Thermal temperature distribution \(\theta\) for different values of nonlocal parameter

Volume fraction field distribution \(\varphi\) for different values of nonlocal parameter

Distribution of stress component \(\sigma_{xx}\) for different values of nonlocal parameter

Distribution of stress component \(\sigma_{xy}\) for different values of nonlocal parameter
Figure 2 represents the change of displacement \(v\) with distance \(x\) and satisfies the boundary condition at \(x = 0,\) where \(v\) starts with decreasing to a minimum value in the range \(0 \le x \le 4.7\) and converges to zero with increasing distance \(x\). It is explained that when the value of \(\varepsilon\) is increasing, the value of \(v\) is decreasing. Figure 3 demonstrates the distribution of the thermodynamic temperature \(\theta ,\) it begins with decreasing to a minimum value in the range \(0 \le x \le 0.12,\), then increases and approaches a zero value. The nonlocal parameter increases the magnitude of \(\theta\). Figure 4 shows that when the magnitude of \(\varepsilon\) is increasing magnitude of the volume fraction field \(\varphi\) is decreasing, where it starts from positive values for all value of \(\varepsilon\), then decreases in the range \(0 \le x \le 1.5,\) then increases and converge to zero at \(x \ge 1.5.\) Figure 5 exhibits that the distribution of the stress component \(\sigma_{xx}\) always begins from negative values. For all values of \(\varepsilon\), the values of \(\sigma_{xx}\) start with increasing in the range \(0 \le x \le 0.12,\) then decreasing to a minimum value in the range \(0.12 \le x \le 3.4,\) and finally increasing to a maximum value and becoming constant. Figure 6 depicts the distribution of the stress component \(\sigma_{xy} ,\) based on the three-phase-lag theory and different value of \(\varepsilon\), the magnitudes of the stress component \(\sigma_{xy}\) decrease to a minimum value in the range \(0 \le x \le 1.5,\) but increase in the range \(1.5 \le z \le 5.5,\) also the magnitude of \(\sigma_{xy}\) decrease while the value of \(\varepsilon\) increase.
The influence of different values of the magnetic field, according to the three-phase-lag model on the displacement component \(v,\) the thermodynamic temperature \(\theta ,\) the volume fraction field \(\varphi ,\) and the stress component \(\sigma_{xy} ,\) in Figs. 7, 8, 9, 10. Figure 7 displays the effect of the magnetic field on the vertical displacement \(v,\) where the values of \(v\) begin from zero except at the \(H_{0} = 0\) starts from negative, then the values of \(v\) decrease in the range \(0 \le x \le 4.2,\) then increase at \(x \ge 4.2\) and go to zero. Figure 8 shows that the variance of the thermodynamic temperature \(\theta ,\) begins with decreasing to a minimum value in the range \(0 \le x \le 0.12\) for \((H_{0} = 30,10,0)\) then increases in the range \(0.12 \le x \le 2\) and converges to zero for \(x \ge 2.\) Figure 9 exhibits that the distribution of the volume fraction field \(\varphi\), it is observed that due to the presence of a magnetic field, the volume fraction field \(\varphi\) appreciably decreased for \(H_{0} = 30,10\) in comparison with \(H_{0} = 0,\) it begins from positive values, then decreases to a minimum value in the range \(0 \le x \le 1.8\) and converge to zero with increasing distance \(x\) at \(x \ge 1.8\) for all values of \((H_{0} = 30,10,0).\) Figure 10 depicts that the distribution of the stress component \(\sigma_{xy} ,\) where the values of the stress component \(\sigma_{xy}\) agree with the boundary condition and decrease in the range \(0 \le x \le 1.3,\) but increase in the range \(1 \le x \le 5.5.\)

Effect of different values of magnetic field on vertical displacement \(v\)

Effect of different values of magnetic field on thermal temperature distribution \(\theta\)

Effect of different values of magnetic field on volume fraction field distribution \(\varphi\)

Effect of different values of magnetic field on stress component \(\sigma_{xy}\)
Figures 11, 12, and 13 are giving 3D surface curves for the thermodynamic temperature \(\theta ,\) the stress component \(\sigma_{xy}\) and the change in the volume fraction field \(\varphi\) to study the nonlocal porous thermoelastic solid under the effect of the magnetic field in the context of the three-phase lag (3PHL) model. These figures are very important to study the dependence of these physical quantities on the vertical component of distance.

3D distribution of thermal temperature \(\theta\) versus components of distance

3D distribution of stress component \(\sigma_{xy}\) versus components of distance

3D distribution of volume fraction field \(\varphi\) versus components of distance
8 Conclusions
In this problem, we studied the effect of the magnetic field and the memory-dependent derivative on a nonlocal thermoelastic porous solid in the context of the three-phase-lag (PHL) model. The resulting non-dimensional equations were solved by using the normal mode analysis. We can get the following conclusions based on the above discussions:
-
a)
The locality has played a major role in the physical fields which are fairly clear from Figs. 1, 2, 3, 4, 5.
-
b)
The magnetic field has played a major role in the physical fields which are pretty clear from Figs. 6, 7, 8, 9.
-
c)
The vertical distance has played a major role in the physical fields which are pretty clear from Figs. 10, 11, 12.
-
d)
All physical quantities distributions have converged to zero with increasing distance \(x,\) and all functions are continuous.
-
e)
The method that was used in the present article is applicable to a wide range of problems in hydrodynamics and thermoelasticity.
-
f)
Three-phase-lag model is very useful in the problems of nuclear boiling, exothermic catalytic reactions, phonon-electron interactions, phonon-scattering, etc.
References
J L Wang, H F Li and Com. Math. Appl. 62 1562 (2011)
Y-J Yu J. Eng. Sci. 811 23 (2014)
M A Ezzat AS EL-Karamany and AA EL-Bary Mech Adv Mater Struct 23 545 (2016)
M A Ezzat Sys. An Int. 19 539 (2017)
Y Li and T He Math. Mech. Solids 24 1438 (2019)
S Kant and S Mukhopadhyay Math. Mech. Solids 24 2392 (2019)
S Mondal P Pal and M Kanoria Acta Mech. 230 179 (2019)
S M Said, E M Abd-ELaziz and M I A Othman Steel Comp. Struct. 36 617 (2020)
N Sarkar and S De Ind. J. Phys. 95 1203 (2021)
R Tiwari and R Kumar Appl. Phys. A 128 Art. 19 (2022)
A M Abd-Alla Math. Comp. 155 235 (2004)
M I A Othman J. Num. Meth. Heat Fluid Flow 29 4788 (2019)
S Gupta, R Dutta, S Das and AK Verma J. Therm. Stress. (2023) Doi. https://doi.org/10.1080/01495739.2023.2202718
MIA Othman Multi Mater. Struct. 1 231 (2005)
M A Ezzat J. Phys. 87 329 (2009)
SM Abo-Dahab and AM Abd-Alla J. Vib. Control 22 2885 (2016)
SM Said J. Com. Appl. Math. 291 142 (2016)
E M Abd-ELaziz M Marin and MIA Othman Symmetry 11 413 (2019)
SM Said and MIA Othman Struct Eng. Mech. An Int. J. 74 425 (2020)
AM ALharbi, MIA Othman and EM Abd-ELaziz Int. J. Struct. Stab. Dynam. 21 Art. 2150189 (2021)
AM ALharbi, SM Said, EM Abd-ELaziz and MIA Othman Int. J. Struct. Stab. Dynam. 22 Art. 2250007 (2022)
AK Yadav Mech Mach. An Int. J. 50 4117 (2022)
AK Yadav J. Therm. Stress. 44 86 (2021)
S Gupta Bas. Des. Struct. Mach. 51 764 (2023)
AK Yadav J. Eng. Phys. Thermophys. 94 1663 (2021)
D Iesan Acta Mechanica 60 67 (1986)
M Ciarletta, A Scalia and Z Angew Maths. Mech. 73 67 (1993)
AK Yadav Waves Rand Comp. Media (2021). https://doi.org/10.1080/17455030.2021.1956014
AK Yadav J. Ocean Eng. Sci. 6 376 (2021)
S Gupta, R Dutta and S Das Int. J. Numer. Meth. Heat & Fluid Flow 32 3697 (2022)
AM ALharbi, SM Said and MIA Othman Steel Compos. Struct. 40 881 (2021)
S Gupta and R Dutta Rand. Comp. Media (2021). https://doi.org/10.1080/17455030.2021.2021315
E Inan and AC Eringen Int. J. Eng. Sci. 29 831 (1991)
R Artan Int. J. Eng. Sci. 34 943 (1996)
S Gupta, R Dutta and S Das J. Ocean Eng. Sci. In Press
S Gupta, S Das, R Dutta and AK Verm J. Ocean Eng. Sci. In Press
S Gupta Adv. Mater. Struct. 30 449 (2023)
A K Yadav and E Carrera Adv. Mater. Struct. (2022). https://doi.org/10.1080/15376494.2022.2130484
SM Said Geomech Eng. 32 137 (2023)
RB Hetnarski and MR Eslami, Springer Science Business Media, B.V., New York, 41 227 (2009)
AC Eringen and DGB Edelen Int J. Eng. Sci. 10 233 (1972)
A C Eringen J. Appli. Phys. 54 4703 (1983)
J Wang and R S Dhaliwal J. Therm. Stress. 16 71 (1993)
P Purkaita, A Sur and M Kanoria Adv. Appl. Math. Mech. 5 28 (2017)
R S Choudhuri J. Therm. Stress. 30 231 (2007)
M Caputo J. Aco. Soc. Amer. 56 897 (1971)
M Caputo and F Mainardi Pure Appl. Geophys. 91 134 (1971)
M Caputo and F Mainardi La Rivista del Nuovo Cimento 1 161 (1971)
I Abbas and A Hobiny S Vlase and M Marin Mathematics 10 2168 (2022)
R Quintanilla and R Racke Int. J. Heat Mass Transfer 51 24 (2008)
Funding
Open access funding provided by The Science, Technology & Innovation Funding Authority (STDF) in cooperation with The Egyptian Knowledge Bank (EKB). The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix
Appendix
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Said, S.M., Othman, M.I.A. & Eldemerdash, M.G. Influence of a magnetic field on a nonlocal thermoelastic porous solid with memory-dependent derivative. Indian J Phys 98, 679–690 (2024). https://doi.org/10.1007/s12648-023-02800-1
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12648-023-02800-1