
Abstract
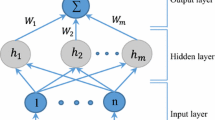
Dynamic compensation can improve the accuracy of trajectory tracking for industrial manipulators. For irregularly shape or flexible manipulators, however, it is difficult to measure the position of the center of mass (COM) so that its dynamic model cannot be expressed explicitly. This paper proposes a proportional derivative (PD) controller with radial basis function neural network based gravity and inertia compensation (RBFNN-GIC). The RBFNN is utilized to estimate the gravity disturbance and to enable identification of COM to calculate the compensated inertia term. The proposed strategy based on the dynamic model can be used on any robot arm whose COM, gravity and inertia are difficult to obtain. To demonstrate the optimization and effectiveness of proposed PD controller, comparative experiments between the proposed control scheme and the traditional data-fitting method least mean square method (LMS) are conducted on a 3 degree of freedom (DOF) robotic manipulator.
Similar content being viewed by others

References
R. Toxqui, W. Yu, and X. Li, “PD control of overhead crane with velocity estimation and uncertainties compensation,” Proc. of 6th World Congress on Intelligent Control and Automation, pp. 139–143, 2006.
C. Dey, R. K. Mudi, and D. Simhachalam, “A simple nonlinear PD controller for integrating processes,” ISA Transactions, vol. 53, no. 1, pp. 162–172, January 2014.
H. Liu, Y. Huang, and W. Wu, “Improved adaptive output feedback controller for flexible-joint robot manipulators,” Proc. of IEEE International Conference on Information and Automation, pp. 1653–1658, 2016.
K. Liu, H. Gao, H. Ji, and Z. Hao, “Adaptive sliding mode based disturbance attenuation tracking control for wheeled mobile robots,” International Journal of Control, Automation and Systems, pp. 1–11, 2019.
J. Huang, C. Yang, and J. Ye, “Nonlinear PD controllers with gravity compensation for robot manipulators,” Cybernetics and Information Technologies, vol. 14, no. 1, pp. 141–150, 2017.
V. Arakelian, “Gravity compensation in robotics,” Advanced Robotics, vol. 30, no. 2, pp. 79–96, Nov. 2015.
H. Zhang, M. Du, G. Wu, and W. Bu, “PD control with RBF neural network gravity compensation for manipulator,” Engineering Letters, vol. 26, no. 2, pp. 236–244, April 2018.
S. Jung, “A neural network compensation technique for an inertia estimation error of a time-delayed controller for a robot manipulator,” International Conference on Neural Information Processing, pp. 339–346, 2018.
K. Chandrasekaran, S. Sivaraman, and A. Thondiyath, “Static balancing and inertia compensation of a master manipulator for tele-operated surgical robot application,” Proc. of the 2015 Conference on Advances in Robotics, pp. 14, 2015.
S. A. Ajwad, U. Iqbal, and J. Iqbal, “Hardware realization and PID control of multi-degree of freedom articulated robotic arm,” Mehran University Research Journal of Engineering and Technology, vol. 34, no. 1, pp. 1–12, May 2015.
A. Sarhan and S. Qin, “Adaptive PID control of UAV altitude dynamics based on parameter optimization with fuzzy inference,” International Journal of Modeling and Optimization, vol. 6, no. 4, pp. 246, Aug. 2016.
M. B. Leahy, “Compensation of industrial manipulator dynamics in the presence of variable payloads,” The International Journal of Robotics Research, vol. 9, no. 4, pp. 86–98, Aug. 1990.
R. Kelly and R. Salgado, “PD control with computed feedforward of robot manipulators: A design procedure,” IEEE Transactions on Robotics and Automation, vol. 10, no. 4, pp. 566–571, Aug. 1994.
X. Luo, Y. Li, and B. Qin, “Neural dynamics for cooperative control of redundant robot manipulators,” IEEE Transactions on Industrial Informatics, vol. 14, no. 9, pp. 3812–3821, Jan. 2018.
B. Mazurov, V. Padve, and E. Levin, “Analysis of the least-squares method evolution: From static to dynamic and updated structure models,” Surveying and Land Information Science, vol. 78, no. 1, pp. 45–50, May 2019.
V. T. Yen, W. Y. Nan, and C. P. Ven, “Robust adaptive sliding mode neural networks control for industrial robot manipulators,” International Journal of Control, Automation and Systems, vol. 17, no. 3, pp. 783–792, 2019.
N. Wang and D. Wang, “Adaptive manipulator control based on RBF network approximation,” Chinese Automation Congress, pp. 2625–2630, 2017.
J. H. Huerta and W. Yu, “A modified PD control of robot manipulator using neural network compensator,” International Joint Conference on Neural Networks, pp. 1999–2004, 1999.
D. Chen, “Research on traffic flow prediction in the big data environment based on the improved RBF neural network,” IEEE Transactions on Industrial Informatics, vol. 13, no. 4, pp. 2000–2008, March 2017.
G. B. Huang, P. Saratchandran, and N. Sundararajan, “A generalized growing and pruning RBF (GGAP-RBF) neural network for function approximation,” IEEE Transactions on Neural Networks, vol. 16, no. 1, pp. 57–67, Jan. 2005.
Z. Li, J. Deng, R. Lu, Y. Xu, and J. Bai, “Trajectory-tracking control of mobile robot systems incorporating neural-dynamic optimized model predictive approach,” IEEE Transactions on Systems, Man, and Cybernetics: Systems, vol. 46, no. 6, pp. 740–749, Aug. 2015.
Z. Hu, Y. Wang, G. Cui, and D. Zhang, “Enhance transparency of force feedback interaction series mechanism by SMC strategy,” International Journal of Control, Automation and Systems, vol. 17, no. 7, pp. 1738–1750, 2019.
S. Jung, “A neural network technique of compensating for an inertia model error in a time-delayed controller for robot manipulators,” International Journal of Control, Automation and Systems, vol. 18, no. 7, pp. 1863–1871, 2020.
Author information
Authors and Affiliations
Corresponding author
Additional information
This research is based upon work supported by the Ministry of Trade, Industry & Energy (MOTIE, Korea) under Industrial Technology Innovation Program. No.10073147.
Yueyuan Zhang received her B.S. degree in communication engineering from Yanbian University, China and an M.S. degree in electronics engineering from Pusan National University, Korea, in 2017 and 2019, respectively. Now she is an assistant engineer in Bright Dream Robotics. And her research interests include adaptive control theory, path planning and impedance control.
Dongeon Kim received his B.S. degree in electronic engineering from Inje University, Korea, in 2015 and an M.S. degree from Pusan National University, Korea, in 2017. Now he is pursuing a doctoral degree in Pusan National University, Korea, and his research interest includes intelligent control, adaptive control, and machine learning.
Yudong Zhao received his B.S. degree in mechanical design, manufacturing and automation from Henan Polytechnic University, China and an M.S. degree in electronics engineering from Pusan National University, Korea, in 2014 and 2016, respectively. Now he is pursing a doctoral degree in Pusan National University, Korea, and his research interest includes computer vision, adaptive control theory, terminal sliding mode control, and collaboration robotics.
Jangmyung Lee received his B.S. and M.S. degrees in electronics engineering from Seoul National University, Seoul, Korea, in 1980 and 1982, respectively, and his Ph.D. in computer engineering from the University of Southern California (USC), Los Angeles, in 1990. Since 1992, he has been a professor with the Intelligent Robot Laboratory, Pusan National University, Busan, Korea. His current research interests include intelligent robotic systems, ubiquitous ports, and intelligent sensor. Prof. Lee is a past president of the Korean Robotics Society, and a Vice president of ICROS. He is also the head of National Robotics Research Center, SPENALO.
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Zhang, Y., Kim, D., Zhao, Y. et al. PD Control of a Manipulator with Gravity and Inertia Compensation Using an RBF Neural Network. Int. J. Control Autom. Syst. 18, 3083–3092 (2020). https://doi.org/10.1007/s12555-019-0482-x
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12555-019-0482-x