
Abstract
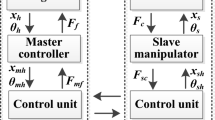
At present, most vascular intervention robots cannot cope with the more common coronary complex lesions in the clinic. Moreover, the lack of effective force feedback increases the risk of surgery. In this paper, a vascular interventional robot that can collaboratively deliver multiple interventional instruments has been developed to assist doctors in the operation of complex lesions. Based on the doctor’s skills and the delivery principle of interventional instruments, the main and slave manipulators of the robot system are designed. Haptic force feedback is generated through resistance measuring mechanism and active drag system. In addition, a force feedback control strategy based on force–velocity mapping is proposed to realize the continuous change of force and avoid vibration. The proposed robot system was evaluated through a series of experiments. The experimental results show that the system can accurately measure the delivery resistance of interventional instruments, and provide haptic force feedback to doctors. The capability of the system to collaboratively deliver multiple interventional instruments is effective. Therefore, it can be considered that the robot system is feasible and effective.
Graphical Abstract






























Similar content being viewed by others


References
Guo S, Song Y, Yin X, Zhang L, Tamiya T, Hirata H, Ishihara H (2019) A novel robot-assisted endovascular catheterization system with haptic force feedback. IEEE Trans Robot 35(3):685–696
Zhang L, Guo S, Yu H, Song Y, Tamiya T, Hirata H, Ishihara H (2018) Design and performance evaluation of collision protection-based safety operation for a haptic robot-assisted catheter operating system. Biomed Microdevices 20(2):22
Bao X, Guo S, Xiao N, Li Y, Shi L (2018) Compensatory force measurement and multimodal force feedback for remote-controlled vascular interventional robot. Biomed Microdevices 20(3):74
Klein LW, Campos EP (2018) Occupational hazards in the cath lab - physician, protect thyself! J Invasive Cardiol 30(2):75–76
Kim Y, Parada GA, Liu S, Zhao X (2019) Ferromagnetic soft continuum robots. Sci Robot 4(33):eaax7329
Haidegger T (2019) Autonomy for surgical robots: concepts and paradigms. IEEE Trans Med Robot Bionics 1:65–76
Di BL, Wang Y, Horton RP, Gallinghouse GJ, Mohanty P, Sanchez JE, Patel D, Dare M, Canby RC, Price LD, Zagrodzky JD, Bailey SM, Burkhardt JD, Natale A (2010) Ablation of atrial fibrillation utilizing robotic catheter navigation in comparison to manual navigation and ablation: single-center experience. J Cardiovasc Electr 20(12):1328–1335
Shaikh ZA, Eilenberg MF, Cohen TJ (2017) The amigo remote catheter system: from concept to bedside. J Innov Card Rhythm Manag 8(8):2795–2802
Swaminathan RV, Rao SV (2018) Robotic-assisted transradial diagnostic coronary angiography. Catheter Cardio Inte 92(1):54–57
Zhao Y, Guo S, Wang Y, Cui J, Ma Y, Zeng Y, Liu X, Jiang Y, Li Y, Shi L, Xiao N (2019) A CNN-based prototype method of unstructured surgical state perception and navigation for an endovascular surgery robot. Med Biol Eng Comput 57(9):1875–1887
Daneshmand M, Bilici O, Bolotnikova A, Anbarjafari G (2017) Medical robots with potential applications in participatory and opportunistic remote sensing: a review. Robot Auton Syst 95:160–180
Mendes PV, Cancelliere NM, Nicholson PJ, Radovanovic I, Drake KE, Sungur JM, Krings T, Turk AS (2020) First-in-human, robotic-assisted neuroendovascular intervention. J Neurointerv Surg 12(4):338–340
Woo JH, Song HS, Cha HJ, Bj Yi (2019) Advantage of steerable catheter and haptic feedback for a 5-dof vascular intervention robot system. Appl Sci-Basel 9(20):4305
Chi W, Liu J, Rafii-Tari H, Riga CV, Bicknell CD, Yang G (2018) Learning-based endovascular navigation through the use of non-rigid registration for collaborative robotic catheterization. Int J Comput Ass Rad 13(6):855–864
Tavallaei MA, Gelman D, Lavdas MK, Skanes AC, Jones DL, Bax JS, Drangova M (2016) Design, development and evaluation of a compact telerobotic catheter navigation system. Int J Med Robot Comput 12(3):442–452
Lynn BS, Hermiller JB (2018) Treatment of bifurcation lesions: has dk crush“ed” the competition? Curr Cardiol Rep 20(10):101
Ambrosini V, Sorropago G, Laurenzano E, Golino L, Casafina A, Schiano V, Gabrielli G, Ettori F, Chizzola G, Bernardi G, Spedicato L, Armigliato P, Spampanato C, Furegato M (2015) Early outcome of high energy Laser (Excimer) facilitated coronary angioplasty ON hARD and complex calcified and balloOn-resistant coronary lesions: LEONARDO study. Cardiovasc Revasc Med 16(3):141–146
Chen T, Xu W, Cai Y, Wang Q, Guo J, Chen Y (2020) Safety and efficacy of guidezilla extension catheter for the percutaneous treatment of complex coronary lesions. Heart Surg Forum 23(2):E147–E150
Bao X, Guo S, Shi L, Xiao N (2019) Design and evaluation of sensorized robot for minimally vascular interventional surgery. Microsyst Technol 25:2759–2766
Choi J, Park SE, Kim YH, Moon Y, Choi J (2021) A vascular intervention assist device using bi-motional roller cartridge structure and clinical evaluation. Biosensors-Basel 11(9):329
Zhou J, Mei Z, Miao J, Mao J, Wang L, Wu D, Sun D, Zhao Y (2020) A remote-controlled robotic system with safety protection strategy based on force-sensing and bending feedback for transcatheter arterial chemoembolization. Micromachines-Basel 11(9):805
Omisore OM, Han S, Ren L, Wang G, Ou F, Li H, Wang L (2018) Towards characterization and adaptive compensation of backlash in a novel robotic catheter system for cardiovascular interventions. IEEE Trans Biomed Circuits Syst 12(4):824–838
Bao X, Guo S, Xiao N, Li Y, Yang C, Jiang Y (2018) A cooperation of catheters and guidewires-based novel remote-controlled vascular interventional robot. Biomed Microdevices 20(1):20
Dagnino G, Liu J, Abdelaziz MEMK, Chi W, Riga C, Yang G (2018) Haptic feedback and dynamic active constraints for robot-assisted endovascular catheterization. In: 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, Madrid, Spain, pp 1770–1775. https://doi.org/10.1109/IROS.2018.8593628
Wang K, Mai X, Xu H, Lu Q, Yan W (2020) A novel SEA-based haptic force feedback master hand controller for robotic endovascular intervention system. Int J Med Robot Comput 16(5):1–10
Jin X, Guo S, Guo J, Shi P, Tamiya T, Hirata H (2021) Development of a tactile sensing robot-assisted system for vascular interventional surgery. IEEE Sens J 21(10):12284–12294
Yang C, Guo S, Bao X, Xiao N, Shi L, Li Y, Jiang Y (2019) A vascular interventional surgical robot based on surgeon’s operating skills. Med Biol Eng Comput 57(9):1999–2010
Bao X, Guo S, Guo Y, Yang C, Shi L, Li Y, Jiang Y (2022) Multilevel operation strategy of a vascular interventional robot system for surgical safety in teleoperation. IEEE Trans Robot 38(4):2238–2250
Funding
This work was partially supported by the National Key Research and Development Program of China (2019YFB1311700), and partially by Shanghai Clinical Research Center for Aging and Medicine (19MC1910500).
Author information
Authors and Affiliations
Contributions
The, research, validation, writing, and writing—review were performed by Haoyang Yu. The methodology, project administration, and funding acquisition were performed by Hongbo Wang. The data collection and experiment execution were performed by Jiangyuan Chang. The software and data analysis were performed by Wenjie Liu. The conceptualization and material preparation were performed by Fuhao Wang. The resources, supervision, and project administration were performed by Jianye Niu.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher's note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Yu, H., Wang, H., Chang, J. et al. Design and evaluation of vascular interventional robot system for complex coronary artery lesions. Med Biol Eng Comput 61, 1365–1380 (2023). https://doi.org/10.1007/s11517-023-02775-5
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11517-023-02775-5