
Abstract
In this work, we investigate the possibility of approximating saturable nonlinearity, which is commonly used in complex Ginzburg–Landau equation (CGLE) for modelling resonant interaction of an electromagnetic field with nonlinear media, with cubic-quintic (CQ) nonlinearity. To validate the suggested approximations, we use variational method to estimate 2D analytical solutions of the CGLE with both saturable and CQ nonlinearity. The paper compares three ways to determine parameters of the CQ approximation and discusses the obtained results in terms of accuracy.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
The class of CGLEs represents a good model for describing a wide variety of phenomena in dissipative systems, such as superconductivity (Ginzburg et al. 1950), nonequilibrium phenomena (Aranson and Kramer 2002), phase transitions (Nato Advanced Study Institute 1975), binary fluid convection (Kolodner 1992), laser generated spatiotemporal dissipative structures, soliton propagation in optical fiber systems (Kodama and Hasegawa 1992), biological systems (Morales et al. 2015), etc.
The CQ CGLE, in particular, is often utilized to describe competitive effects of linear and nonlinear gain and loss. One of the reasons of high popularity of the CQ CGLE is the fact that there are many well developed methods for solving it both analytically and numerically. In the domain of fiber lasers, the model commonly used is the “master equation” derived by Haus (Haus et al. 1991, 1992), which, in fact, represents the stationary CGLE with cubic nonlinearity. The coefficients that appear in the Haus model were related to the physical parameters in a rather phenomenological way (Haus et al. 1994). The cubic CGLE has been investigated in sufficient details in the one-dimensional case. Analytical solutions of dissipative structures in cubic CGLE have been obtained, but all of them are unstable except the class of solutions with arbitrary amplitude in an “exotic” medium with zero linear loss/gain (Akhmediev et al. 1996).
To achieve the stabilization of the dissipative structures (solitons) in the CGLE model, higher-order nonlinear (quintic) terms have been introduced. The obtained equation is referred to as the quintic or CQ CGLE equation. The one-dimensional CQ CGLE, in the case of special relations between its parameters, has analytical solutions in the form of stable solitons with a fixed or arbitrary amplitude (Akhmediev and Afanasjev 1995; Akhmediev et al. 1997, 1998). In the general case, the one dimensional and multidimensional CQ CGLE do not have known exact solutions and have been studied numerically, as well as using different analytical approximations, including the variational method (Skarka and Aleksić 2006; Skarka et al. 2014, 2016; Aleksic et al. 2007, 2012a, b, 2014, 2015).
After the introduction of the cubic “master equation” (Haus et al. 1991, 1992), there have been derived many refinements in the form of CQ CGLE, as a model of resonant interaction of electromagnetic field with nonlinear media. These refinements have been done assuming small intensities, which allows the expansion of the Bloch equations in the series of intensities.
In this work, we further discuss the possibility of using CQ CGLE for modelling resonant interaction of an electromagnetic field. We compare three CQ approximations, including the widely used series expansion, and the CGLE with saturable nonlinearity. More precisely, the comparison is performed in terms of the parameters of stationary two-dimensional fundamental solutions, obtained using variational approach.
2 Model
We consider the response of a medium where active (amplifier) and passive atoms (saturable absorber), with almost identical transition frequencies, are embedded in the background matrix (for example, in a waveguide). Due to quick relaxation of the upper energy levels (three or four), we can reduce the model to an effective two-level scheme. When the concentration of the resonance centers is small, the polarization can be considered as an additive quantity:
consisting of the polarization of active \((\mathcal {P}^{ (\gamma )})\), passive \((\mathcal {P}^{ (\alpha )})\) atoms, and non-resonant polarization of the background matrix \((\mathcal {P}^{ (m)})\).
From the Maxwell–Bloch equations, when the electromagnetic pulse duration is much greater than the relaxation time of the upper working level, we obtain the dimensionless CGLE for the electrical field:
where
and \(\bar{\gamma }=\gamma \delta _{\gamma }\), \(\bar{\alpha }=\alpha \delta _{\alpha }\). The constants \(\delta _{\gamma }\), \(\delta _{\alpha }\) are dimensionless detunings between the gain (amplification) and loss (absorption), with the respect to the spectral line center and the frequency of empty cavity mode. The coefficients \(\gamma\) and \(\alpha\) represent the linear amplification of active atoms and the absorption of passive atoms, (normalized to the absorption coefficient of the background medium), respectively (Fedorov et al. 2000). The linear part of the polarization determines the linear losses, temporal dispersion of the media, and spectral filtering (\(\beta _1\)). Under conditions of resonant interactions, when \(\delta _{\gamma }\rightarrow 0\) and \(\delta _{\alpha }\rightarrow 0\), term N(I) in Eq. (2) can be neglected.
The function G(I) has a maximum
for
if the parameters satisfy the following relation:
Outside this region the function G monotonically either decreases, when \(\gamma >\alpha b\), or increases, when \(\gamma <\alpha / b\). To establish the energy balance and the possibility of the existence of localized structures, the function G(I) should be positive in a finite interval of intensity, i.e. \(G (I_m)> 0\), and \(G (I = 0) <0\), in order to have a stable background. These two conditions in the parameter space become:
Under the previous conditions, function G(I) has two zeros:
as shown by the middle curve in Fig. 1a. The lower curve \((\alpha /b<\gamma <\gamma _{min})\) does not have positive regions, thus the function G provides only loss. The fact that in the upper curve \((\gamma _{max}<\gamma <\alpha b)\) we have \(G(0)>0\) means the linear gain is bigger than the linear loss, which causes an unstable background. The aforementioned properties of the lower and upper curve prevent formation of stable localized structures.

aG as a function of intensity I for different regions of parameter \(\gamma\). bG(I) and its three approximations for \(\alpha =1\) and \(\gamma =1.8\)
In order to simplify analytical estimation of Eq. (2), we consider three approximations of G, by using a second-order polynomial:
which satisfy the condition \(G_a(0)=G(0)\) i.e.
The first approximation (\(G_1\)) is a series expansion, the second (\(G_2\)) reaches maximum value at \(I_m\), and the third (\(G_3\)) has the value of zero at \(I_{0+}\), and \(G(I_m)\) at \(I_m\). Thus:
- 1.
Approximation \(G_1\): the series expansion of Eq. (4)
$$\begin{aligned} \varepsilon _1=b\alpha -\gamma ,\qquad \mu _1=b^2\alpha -\gamma \end{aligned}$$(12) - 2.
Approximation \(G_2\): \(dG_2(I_m)/dI_m=0\) and \(G_2(I_m)=G(I_m)\)
$$\begin{aligned} \varepsilon _2=\frac{2\alpha b}{b-1}\left( 1-\sqrt{\frac{\gamma }{\alpha b} }\right) \left( b\sqrt{\frac{\gamma }{\alpha b}}-1\right) ,\qquad \mu _2=\frac{\alpha b}{b-1}\left( b\sqrt{\frac{\gamma }{\alpha b}}-1\right) ^{2} \end{aligned}$$(13) - 3.
Approximation \(G_3\): \(G_3(I_{0+})=G(I_{0+})=0\) and \(G_3(I_m)=G(I_m)\)
$$\begin{aligned} \varepsilon _3=\frac{G(I_m) I_{0+}}{I_m(I_{0+}-I_m)}+\frac{(I_{0+}+I_m)}{I_mI_{0+}}\delta ,\qquad \mu _3=\frac{G(I_m)}{I_m(I_{0+}-I_m)}+\frac{\delta }{I_mI_{0+}} \end{aligned}$$(14)
Figure 1b shows the saturable nonlinearity (G) and its three approximations (\(G_1\), \(G_2\), \(G_3\)) as functions of intensity I, for parameters \(\alpha =1\) and \(\gamma =1.8\). Clearly, the most widely used approximation \(G_1\) deviates the most from G, while \(G_2\) and \(G_3\) better resemble G. In the next section we analyze each approximation in more details.
The coefficients \(\delta\), \(\varepsilon _a\) and \(\mu _a\) account for linear loss, cubic gain, and quintic loss, respectively. If the loss saturates faster than the gain \((b>1)\), then coefficients \(\varepsilon _a\) and \(\mu _a\) are positive.
3 Variational approach
In order to validate the approximations, we use the variational method to solve the two-dimensional CGLE:
with saturable nonlinearity and its CQ approximations, in the form of localized fundamental solitons. We adopt the trial function in the form of a Gaussian:
where the real variational parameters are the amplitude \(A=A(z)\), width \(R=R(z)\), wave-front curvature C(z), and phase \(\psi =\psi (z)\).
Skipping technical details, along the lines of Skarka and Aleksić (2006), for the saturable nonlinearity of Eq. (4) we obtain the following system of the first-order evolution equations for the parameters of ansatz in Eq. (16):
From the fixed points of Eqs.(17)–(19):
we obtain the steady-state solutions, which are determined by the following system of equations:
where \(\beta _e=\beta /\sqrt{1+\beta ^2}\) and \(\text {Li}_2(x)\) is the polylogarithm function.
In the case of CQ approximations Eq. (10), the stationary values of the trial function parameters are given by the following system of equations (\(a=1,2,3\)):
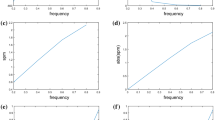
Figure 2 represents the solutions of Eqs. (24) and (27), i.e. dependence of the amplitude of the stationary solution as a function of parameter \(\gamma\), for two values of the parameters \(\beta _e = 0;0.5\), and \(\alpha = 1\), shown in Fig. 2a and \(\alpha =3\) in Fig. 2b. The solution of Eq. (24) is denoted as G while the solutions of Eq. (27) are denoted by \(G_1\), \(G_2\) and \(G_3\). The series expansion \(G_1\), which is widely used in many research papers, represents a good approximation only for small values of the intensity. Approximation \(G_2\) shows better accuracy for slightly larger values of the intensity, while \(G_3\) gives values fairly close to the saturable nonlinearity over the whole intensity domain.
From Eqs. (22) , (25) and (26) we can see that in the case when the wave front curvature (C and \(C_a\)) approaches zero, the radius (R and \(R_a\)) approaches infinity. Therefore, the nonzero value of the wave front curvature is the essential condition in order to have a finite radius, i.e. the existence of localized solutions. The zero values of C and \(C_a\) are marked with circles in Fig. 2.

The amplitude of the stationary solution as a function of the \(\gamma\) for saturable nonlinearity (denoted by G) and three CQ approximations (\(G_1\),\(G_2\) and \(G_3\)). Parameter \(\alpha =1\)—left and \(\alpha =3\)—right
4 Conclusion
A common model for resonant interaction of electromagnetic waves with nonlinear media is the CGLE with saturable nonlinearity. Due to limitations in the analytical analysis of that kind of a model, we approximate the saturable nonlinearity with CQ nonlinearity, whose analytical and numerical aspects have been extensively stuided.
Using the variational method, we analyze three different second-order polynomial approximations of the saturable nonlinearity. The obtained results show the differences of the steady-state solutions between different approximations and the saturable nonlinearity, and depending on the application, suggest the most accurate approach. The most adequate approximation is the second-order polynomial, which has the same value at the linear limit and the common distant zero with saturable nonlinearity.
In the parameter space of the resonant medium, the region of possible approximations is determined. The parameters of the polynomial approximation are related to the physical parameters of the resonant medium.
References
Akhmediev, N., Afanasjev, V.V.: Novel arbitrary-amplitude soliton solutions of the cubic-quintic complex Ginzburg–Landau equation. Phys. Rev. Lett. 75, 2320–2323 (1995). https://doi.org/10.1103/PhysRevLett.75.2320
Akhmediev, N.N., Afanasjev, V.V., Soto-Crespo, J.M.: Singularities and special soliton solutions of the cubic-quintic complex Ginzburg–Landau equation. Phys. Rev. E 53, 1190–1201 (1996). https://doi.org/10.1103/PhysRevE.53.1190
Akhmediev, N.N., Ankiewicz, A., Soto-Crespo, J.M.: Multisoliton solutions of the complex Ginzburg–Landau equation. Phys. Rev. Lett. 79, 4047–4051 (1997). https://doi.org/10.1103/PhysRevLett.79.4047
Akhmediev, N.N., Ankiewicz, A., Soto-Crespo, J.M.: Stable soliton pairs in optical transmission lines and fiber lasers. J. Opt. Soc. Am. B 15(2), 515–523 (1998). https://doi.org/10.1364/JOSAB.15.000515
Aleksic, N., Pavlovic, G., Aleksic, B., Skarka, V.: Stable one-dimensional dissipative solitons in complex cubic-quintic Ginzburg–Landau equation. Acta Phys. Pol., A 112(5), 941–947 (2007)
Aleksic, B., Zarkov, B., Skarka, V., Aleksic, N.: Stability analysis of fundamental dissipative Ginzburg–Landau solitons. Phys. Scr. T149, 014037 (2012a). https://doi.org/10.1088/0031-8949/2012/t149/014037
Aleksić, B., Aleksić, N., Skarka, V., Belić, M.: Using graphical processing units to solve the multidimensional Ginzburg–Landau equation. Phys. Scr. T149, 014036 (2012b). https://doi.org/10.1088/0031-8949/2012/t149/014036
Aleksić, B.N., Aleksić, N.B., Skarka, V., Belić, M.R.: Modulation instability of solutions to the complex Ginzburg–Landau equation. Phys. Scr. T162, 014002 (2014). https://doi.org/10.1088/0031-8949/2014/t162/014002
Aleksić, B.N., Aleksić, N.B., Skarka, V., Belić, M.: Stability and nesting of dissipative vortex solitons with high vorticity. Phys. Rev. A 91, 043832 (2015). https://doi.org/10.1103/PhysRevA.91.043832
Aranson, I.S., Kramer, L.: The world of the complex Ginzburg–Landau equation. Rev. Mod. Phys. 74, 99–143 (2002). https://doi.org/10.1103/RevModPhys.74.99
Fedorov, S.V., Vladimirov, A.G., Khodova, G.V., Rosanov, N.N.: Effect of frequency detunings and finite relaxation rates on laser localized structures. Phys. Rev. E 61, 5814–5824 (2000). https://doi.org/10.1103/PhysRevE.61.5814
Ginzburg, V.L., Landau, L.D., Eksp, Z.H.: On the Theory of superconductivity. Teor. Fiz. 20, 1064–1082 (1950)
Haus, H.A., Fujimoto, J.G., Ippen, E.P.: Structures for additive pulse mode locking. J. Opt. Soc. Am. B 8(10), 2068–2076 (1991). https://doi.org/10.1364/JOSAB.8.002068
Haus, H.A., Fujimoto, J.G., Ippen, E.P.: Analytic theory of additive pulse and Kerr lens mode locking. IEEE J. Quant. Electron. 28(10), 2086–2096 (1992)
Haus, H.A., Ippen, E.P., Tamura, K.: Additive-pulse modelocking in fiber lasers. IEEE J. Quant. Electron. 30(1), 200–208 (1994). https://doi.org/10.1109/3.272081
Kodama, Y., Hasegawa, A.: Generation of asymptotically stable optical solitons and suppression of the Gordon–Haus effect. Opt. Lett. 17(1), 31–33 (1992). https://doi.org/10.1364/OL.17.000031
Kolodner, P.: Extended states of nonlinear traveling-wave convection. II. Fronts and spatiotemporal defects. Phys. Rev. A 46, 6448–6465 (1992). https://doi.org/10.1103/PhysRevA.46.6452
Morales, M., Rojas, J., Oliveros, J., Hernandez, S.A.A.: A new mechanochemical model: coupled Ginzburg-Landau and Swift–Hohenberg equations in biological patterns of marine animals. J. Theor. Biol. 368, 37–54 (2015). https://doi.org/10.1016/j.jtbi.2014.12.005
NATO Advanced Study Institute, Geilo, T., Riste, N., Institute, Fluctuations, Instabilities, and Phase Transitions. NATO ASI Series: Physics. Springer US (1975)
Skarka, V., Aleksić, N.B.: Stability criterion for dissipative soliton solutions of the one-, two-, and three-dimensional complex cubic-quintic Ginzburg–Landau Equations. Phys. Rev. Lett. 96, 013903 (2006). https://doi.org/10.1103/PhysRevLett.96.013903
Skarka, V., Aleksić, N.B., Lekić, M., Aleksić, B.N., Malomed, B.A., Mihalache, D., Leblond, H.: Formation of complex two-dimensional dissipative solitons via spontaneous symmetry breaking. Phys. Rev. A 90, 023845 (2014). https://doi.org/10.1103/PhysRevA.90.023845
Skarka, V., Aleksić, N., Krolikowski, W., Christodoulides, D., Aleksić, B., Belić, M.: Linear modulational stability analysis of Ginzburg–Landau dissipative vortices. Opt. Quant. Electron. 48(4), 240 (2016). https://doi.org/10.1007/s11082-016-0514-1
Acknowledgements
Open Access funding provided by the Qatar National Library. This work was supported by the Ministry of Science of the Republic of Serbia under the projects OI 171006, by the NPRP 11S-1126-170033 project of the Qatar National Research Fund, and the Russian Science Foundation project No 18-11-00247. MRB acknowledges support by the Al Sraiya Holding Group.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
This article is part of the Topical Collection on Advanced Photonics Meets Machine Learning.
Guest edited by Goran Gligoric, Jelena Radovanovic and Aleksandra Maluckov.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Aleksić, B.N., Uvarova, L.A., Aleksić, N.B. et al. Cubic quintic Ginzburg Landau equation as a model for resonant interaction of EM field with nonlinear media. Opt Quant Electron 52, 175 (2020). https://doi.org/10.1007/s11082-020-02271-2
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s11082-020-02271-2