
Abstract
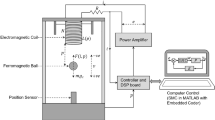
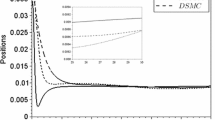
The sliding-mode control (SMC) has been used successfully to stabilize nonlinear systems, yet a side effect of SMC is chattering, an undesired phenomenon. Researchers have then introduced the so-called integral-type approach to diminish chattering. Additional studies have shown that SMC with the so-called barrier function can drive the system state to a region close to the origin. The main contribution of this paper is to join both setups in the context of SMC, i.e., integral term and barrier function. We show that SMC with both integral term and barrier function can be used to track any given trajectory while ensuring both stability and chattering-free performance. The potential of this novel control for applications is illustrated through real-time experiments performed on a magnetic levitation system.






Similar content being viewed by others

Data availability
All the data that support this study and all the data collected during the experiments are freely available under request.
References
Nikravesh, S.K.Y.: Nonlinear Systems Stability Analysis: Lyapunov-Based Approach. CRC Press, Boca Raton (2018)
Khalil, H.K.: Nonlinear Systems, 3rd edn. Prentice Hall Inc., Upper Saddle River (2002)
Goriely, A., Hyde, C.: Necessary and sufficient conditions for finite time singularities in ordinary differential equations. J. Differ. Equ. 161(2), 422–448 (2000)
Oza, H.B., Orlov, Y.V., Spurgeon, S.K.: Continuous uniform finite time stabilization of planar controllable systems. SIAM J. Control Optim. 53(3), 1154–1181 (2015)
Abdelrahim, M., Postoyan, R., Daafouz, J., Nesić, D.: Robust event-triggered output feedback controllers for nonlinear systems. Automatica 75, 96–108 (2017)
Freeman, R., Kokotovic, P.V.: Robust Nonlinear Control Design: State-Space and Lyapunov Techniques. Springer Science & Business Media, New York (2008)
Liberzon, D., Hespanha, J.P.: Stabilization of nonlinear systems with limited information feedback. IEEE Trans. Autom. Control 50(6), 910–915 (2005)
Omran, H., Hetel, L., Petreczky, M., Richard, J.P., Lamnabhi-Lagarrigue, F.: Stability analysis of some classes of input-affine nonlinear systems with aperiodic sampled-data control. Automatica 70, 266–274 (2016)
Gao, W., Hung, J.: Variable structure control of nonlinear systems: a new approach. IEEE Trans. Ind. Electron. 40(1), 45–55 (1993)
Sabanovic, A.: Variable structure systems with sliding modes in motion control: a survey. IEEE Trans. Ind. Inform. 7(2), 212–223 (2011)
Utkin, V.I.: Sliding Modes in Control and Optimization. Springer Science & Business Media, New York (2013)
Rath, J.J., Defoort, M., Sentouh, C., Karimi, H.R., Veluvolu, K.C.: Output-constrained robust sliding mode based nonlinear active suspension control. IEEE Trans. Ind. Electron. 67(12), 10652–10662 (2020)
Vargas, A.N., Montezuma, M.A.F., Liu, X., Xu, L., Yu, X.: Sliding-mode control for stabilizing high-order stochastic systems: application to one-degree-of-freedom aerial device. IEEE Trans. Syst. Man Cybern. Syst. 50(11), 4318–4325 (2020)
Colombo, L., Corradini, M., Ippoliti, G., Orlando, G.: Pitch angle control of a wind turbine operating above the rated wind speed: a sliding mode control approach. ISA Transactions 96, 95–102 (2020)
Khan, A.H., Li, S.: Sliding mode control with PID sliding surface for active vibration damping of pneumatically actuated soft robots. IEEE Access 8, 88793–88800 (2020). https://doi.org/10.1109/ACCESS.2020.2992997
Wang, J., Zhao, L., Yu, L.: Adaptive terminal sliding mode control for magnetic levitation systems with enhanced disturbance compensation. IEEE Trans. Ind. Electron. 68(1), 756–766 (2021)
Shtessel, Y., Edwards, C., Fridman, L., Levant, A.: Sliding Mode Control and Observation. Birkhauser-Springer, New York (2014)
Utkin, V., Shi, J.: Integral sliding mode in systems operating under uncertainty conditions. In: Proceedings of 35th IEEE Conference on Decision and Control, vol. 4, pp. 4591–4596 (1996)
Das, M., Mahanta, C.: Optimal second order sliding mode control for nonlinear uncertain systems. ISA Transactions 53(4), 1191–1198 (2014)
Ferrara, A., Incremona, G.P.: Design of an integral suboptimal second-order sliding mode controller for the robust motion control of robot manipulators. IEEE Trans. Control Syst. Technol. 23(6), 2316–2325 (2015)
Pan, Y., Yang, C., Pan, L., Yu, H.: Integral sliding mode control: performance, modification, and improvement. IEEE Trans. Ind. Inform. 14(7), 3087–3096 (2018)
Ding, S., Mei, K., Li, S.: A new second-order sliding mode and its application to nonlinear constrained systems. IEEE Trans. Autom. Control 64(6), 2545–2552 (2019)
Mu, C., He, H.: Dynamic behavior of terminal sliding mode control. IEEE Trans. Ind. Electron. 65(4), 3480–3490 (2018)
Laghrouche, S., Harmouche, M., Chitour, Y., Obeid, H., Fridman, L.M.: Barrier function-based adaptive higher order sliding mode controllers. Automatica 123, 109355 (2021)
Obeid, H., Fridman, L.M., Laghrouche, S., Harmouche, M.: Barrier function-based adaptive sliding mode control. Automatica 93, 540–544 (2018)
Shao, K., Zheng, J., Wang, H., Wang, X., Lu, R., Man, Z.: Tracking control of a linear motor positioner based on barrier function adaptive sliding mode. IEEE Trans. Ind. Inform. (2021). https://doi.org/10.1109/TII.2021.3057832
Liu, Z., Pan, H.: Barrier function-based adaptive sliding-mode control for application to vehicle suspension. IEEE Trans. Transp. Electr. (2020). https://doi.org/10.1109/TTE.2020.3043581
Abd, A.F., Al-Samarraie, S.A.: Integral sliding mode control based on barrier function for servo actuator with friction. Eng. Technol. J. 39(2), 248–259 (2021)
Obeid, H., Fridman, L., Laghrouche, S., Harmouche, M.: Barrier function-based adaptive integral sliding mode control. In: 2018 IEEE Conference on Decision and Control (CDC), pp. 5946–5950 (2018). https://doi.org/10.1109/CDC.2018.8619334
Takács, G., Mihalík, J., Mikuláš, E., Gulan, M.: Magnetoshield: prototype of a low-cost magnetic levitation device for control education. In: IEEE Global Engineering Education Conference (EDUCON), pp. 1516–1525 (2020). https://doi.org/10.1109/EDUCON45650.2020.9125091
Pujol-Vázquez, G., Vargas, A.N., Mobayen, S., Acho, L.: Semi-active magnetic levitation system for education. Appl. Sci. 11, 5330 (2021). https://doi.org/10.3390/app11125330
Zhang, Z., Gao, T., Qin, Y., Yang, J., Zhou, F.: Numerical study for zero-power Maglev system inspired by undergraduate project kits. IEEE Access 8, 90316–90323 (2020). https://doi.org/10.1109/ACCESS.2020.2994128
Sathiyavathi, S.: Design of sliding mode controller for magnetic levitation system. Comput. Electr. Eng. 78, 184–203 (2019)
Muresan, C.I., Ionescu, C., Folea, S., De Keyser, R.: Fractional order control of unstable processes: the magnetic levitation study case. Nonlinear Dyn. 80(4), 1761–1772 (2015)
Roy, P., Roy, B.K.: Sliding mode control versus fractional-order sliding mode control: applied to a magnetic levitation system. J. Control Autom. Electr. Syst. 31, 597–606 (2020). https://doi.org/10.1007/s40313-020-00587-8
Ginoya, D., Gutte, C.M., Shendge, P., Phadke, S.: State-and-disturbance-observer-based sliding mode control of magnetic levitation systems. Trans. Inst. Meas. Control 38(6), 751–763 (2016)
Shieh, H.J., Siao, J.H., Liu, Y.C.: A robust optimal sliding-mode control approach for magnetic levitation systems. Asian J. Control 12(4), 480–487 (2010)
Sun, G., Ma, Z.: Practical tracking control of linear motor with adaptive fractional order terminal sliding mode control. IEEE/ASME Trans. Mechatron. 22(6), 2643–2653 (2017). https://doi.org/10.1109/TMECH.2017.2766279
Cao, Y., Chen, X.B.: An output-tracking-based discrete PID-sliding mode control for MIMO systems. IEEE/ASME Trans. Mechatron. 19(4), 1183–1194 (2014). https://doi.org/10.1109/TMECH.2013.2275743
Liu, Z., Pan, H.: Barrier function-based adaptive sliding mode control for application to vehicle suspensions. IEEE Trans. Transp. Electr. 7(3), 2023–2033 (2021). https://doi.org/10.1109/TTE.2020.3043581
Mobayen, S., Alattas, K.A., Fekih, A., El-Sousy, F.F.M., Bakouri, M.: Barrier function-based adaptive nonsingular sliding mode control of disturbed nonlinear systems: A linear matrix inequality approach. Chaos Solitons Fractals 157, 111918 (2022)
Rodrigues, V.H.P., Hsu, L., Oliveira, T.R., Fridman, L.: Adaptive sliding mode control with guaranteed performance based on monitoring and barrier functions. Int. J. Adapt. Control Signal Process. 36(6), 1252–1271 (2022)
Seeber, R., Horn, M.: Guaranteeing disturbance rejection and control signal continuity for the saturated super-twisting algorithm. IEEE Control Syst. Lett. 3(3), 715–720 (2019)
Baker, C.T.H., Makroglou, A., Short, E.: Regions of stability in the numerical treatment of Volterra integro-differential equations. SIAM J. Numer. Anal. 16(6), 890–910 (1979)
Matthys, J.: A-Stable linear multistep methods for Volterra integro-differential equations. Numer. Math. 27(1), 85–94 (1976)
Adil, H.M.M., Ahmed, S., Ahmad, I.: Control of MagLev system using super-twisting and integral backstepping sliding mode algorithm. IEEE Access 8, 51352–51362 (2020). https://doi.org/10.1109/ACCESS.2020.2980687
Bidikli, B.: An observer-based adaptive control design for the maglev system. Trans. Inst. Meas. Control. 42(14), 2771–2786 (2020)
Cheng, D.K.: Field and Wave Electromagnetics, 2nd edn. Pearson, Harlow, Essex, UK (2013)
Morales, R., Sira-Ramírez, H.: Trajectory tracking for the magnetic ball levitation system via exact feedforward linearisation and GPI control. Int. J. Control 83(6), 1155–1166 (2010). https://doi.org/10.1080/00207171003642196
Meystre, P., Sargent, M.: Classical Electromagnetic Fields. Elements of Quantum Optics. Springer, Berlin (1999). https://doi.org/10.1007/978-3-662-03877-2-1
Fuh, C.C., Tsai, H.H.: Adaptive parameter identification of servo control systems with noise and high-frequency uncertainties. Mech. Syst. Signal Process 21, 1437–1451 (2007)
Chiu, C.S.: Derivative and integral terminal sliding mode control for a class of MIMO nonlinear systems. Automatica 48, 316–326 (2012). https://doi.org/10.1016/j.automatica.2011.08.055
Funding
Research supported in part by the Brazilian agency CNPq Grant 305158/2017-1; 305998/2020-0; 421486/2016-3.
Author information
Authors and Affiliations
Contributions
All authors contributed to the study’s conception and design. Leonardo Acho and Pujol-Vázquez performed material preparation, data collection, and analysis. All authors wrote the manuscript, and all authors commented on previous versions. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Conflict of interest
The authors have no relevant financial or non-financial interests to disclose.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix
Appendix
1.1 Proof of Proposition 1
Taking the derivative with respect to the time on both sides of (36), and substituting (1) into the corresponding expression, we obtain (for all \(t>0\))
Now, recall from (3) that
and from (5) that
As a result,
Substituting (37) into (40) yields (11). This argument completes the proof. \(\square \)
1.2 Summary of the SMC control approach given in [52]
This section presents the SMC control method, which is borrowed from [52] and adapted to our MagLev device. In [52], the uncertainty part of the system is bounded by a known positive function, which is not available in our approach. Therefore, we suppose that we know an upper bound of the un-modeled part of the MagLev system. It then follows that the result in [52, Thm. 1] can be written as
with \(p>q>0\), \(\delta >0\) and \(K>0\) control parameters to be tuned. The function G depends on the disturbance upper bound.
Rights and permissions
Springer Nature or its licensor holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Mobayen, S., Vargas, A.N., Acho, L. et al. Stabilization of two-dimensional nonlinear systems through barrier-function-based integral sliding-mode control: application to a magnetic levitation system. Nonlinear Dyn 111, 1343–1354 (2023). https://doi.org/10.1007/s11071-022-07890-w
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-022-07890-w