
Abstract
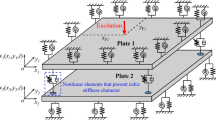
The dynamical modelling method and nonlinear characteristics of the multi-plate structure are investigated in this paper. The structure presents as a chain, which consists of multiple plates and adjacent plates are connected by a long hinge. The length of the hinge should be considered therefore the boundary conditions of each plate are discontinuous. A novel constraining method based on the power series polynomial is proposed to establish the mathematical model of the connection and constraint for the plate with the local restrained boundary. The characteristic equation of the multi-plate structure is derived by using the Rayleigh–Ritz method and then natural frequencies are obtained. The discrete nonlinear dynamical equation is established by using the obtained linear modal shapes. By comparing natural characteristics with the result of the finite element model, the correctness of the present model and the validation of the proposed method are verified. The modal analysis shows that the complex frequency phenomena are due to the different influence of the long hinge on symmetric and antisymmetric modes of each plate. The parameter analysis reveals nonlinear characteristics of the whole multi-plate structure. Numerical results demonstrate that the proposed constraining method can impose constraints on interval discontinuous boundaries of the plate, which goes beyond the traditional Lagrange multiplier method.
















Similar content being viewed by others

Data availability
The data used to support this study will be provided upon request.
References
Wang, I., Gibbs, S.C., Dowell, E.H.: Aeroelastic model of multisegmented folding wings: theory and experiment. J. Aircr. 49(3), 911–921 (2012)
Mishra, N., Singh, S.P.: Determination of modes of vibration for accurate modelling of the flexibility effects on dynamics of a two link flexible manipulator. Int. J. Non Linear Mech. 141, 103943 (2022)
Li, H.-Q., Duan, L.-C., Liu, X.-F., Cai, G.-P.: Deployment and control of flexible solar array system considering joint friction. Multibody Sys. Dyn. 39(3), 249–265 (2017)
Awrejcewicz, J., Krysko, A.V., Zhigalov, M., Saltykova, O., Krysko, V.: Chaotic vibrations in flexible multi-layered bernoulli-euler and timoshenko type beams. Latin Am. J. Solids Struct. 5, 319–363 (2008)
Awrejcewicz, J., Krysko, V.A.: Feigenbaum scenario exhibited by thin plate dynamics. Nonlinear Dyn. 24(4), 373–398 (2001)
Awrejcewicz, J., Krysko, V.A., Krysko, A.V.: Spatio-temporal chaos and solitons exhibited by von kÁrmÁn model. Int. J. Bifurcation Chaos 12(07), 1465–1513 (2002)
Krysko, A.V., Awrejcewicz, J., Papkova, I.V., Krysko, V.A.: Routes to chaos in continuous mechanical systems: Part 2 modelling transitions from regular to chaotic dynamics. Chaos Solitons Fract. 45(6), 709–720 (2012)
Chen, J., Hu, W.-H., Li, Q.-S.: Nonlinear dynamics of a foldable multibeam structure with one to two internal resonances. Int. J. Mech. Sci. 150, 369–378 (2019)
Kumar, P., Pratiher, B.: Modal characterization with nonlinear behaviors of a two-link flexible manipulator. Arch. Appl. Mech. 89(7), 1201–1220 (2019)
Hu, W., Gao, Y., Yang, B.: Semi-active vibration control of two flexible plates using an innovative joint mechanism. Mech. Syst. Signal Process. 130, 565–584 (2019)
Kandil, A.: Internal resonances among the first three modes of a hinged–hinged beam with cubic and quintic nonlinearities. Int. J. Non Linear Mech. 127, 103592 (2020)
Chen, X., Jiang, S., Wang, T.: Dynamic modeling and analysis of multi-link mechanism considering lubrication clearance and flexible components. Nonlinear Dyn. 107(4), 3365–3383 (2022)
Xing, W.C., Wang, Y.Q.: Vibration characteristics analysis of rigid-flexible spacecraft with double-direction hinged solar arrays. Acta Astronaut. 193, 454–468 (2022)
Zhang, W., Lv, S., Ni, Y.: Parametric aeroelastic modeling based on component modal synthesis and stability analysis for horizontally folding wing with hinge joints. Nonlinear Dyn. 92(2), 169–179 (2018)
Vak, A., Ja, B., Ivp, A., Oasa, C., Avkd, C.: On reliability of chaotic dynamics of two euler–bernoulli beams with a small clearance. Int. J. Non Linear Mech. 104, 8–18 (2018)
Awrejcewicz, J., Krysko, V.A., Zhigalov, M.V., Krysko, A.V.: Contact interaction of two rectangular plates made from different materials with an account of physical nonlinearity. Nonlinear Dyn. 91(2), 1191–1211 (2018)
Awrejcewicz, J., Krysko, V.A., Yakovleva, T.V., Pavlov, S.P., Krysko, V.A.: Nonlinear dynamics of contact interaction of a size-dependent plate supported by a size-dependent beam. Chaos Interdiscip. J. Nonlinear Sci. 28(5), 053102 (2018)
Krysko, V.A., Awrejcewicz, J., Dobriyan, V., Papkova, I.V., Krysko, V.A.: Size-dependent parameter cancels chaotic vibrations of flexible shallow nano-shells. J. Sound Vib. 446, 374–386 (2019)
Teng, M.W., Wang, Y.Q.: Nonlinear forced vibration of simply supported functionally graded porous nanocomposite thin plates reinforced with graphene platelets. Thin Walled Struct. 164, 107799 (2021)
Freydin, M., Dowell, E.H., Spottswood, S.M., Perez, R.A.: Nonlinear dynamics and flutter of plate and cavity in response to supersonic wind tunnel start. Nonlinear Dyn. 103(4), 3019–3036 (2021)
Hao, R.-B., Lu, Z.-Q., Ding, H., Chen, L.-Q.: A nonlinear vibration isolator supported on a flexible plate: analysis and experiment. Nonlinear Dyn. 108(2), 941–958 (2022)
Zhang, K., Pan, J., Lin, T.R.: Vibration of rectangular plates stiffened by orthogonal beams. J. Sound Vib. 513, 116424 (2021)
Li, Z., Zhong, R., Wang, Q., Qin, B., Yu, H.: The thermal vibration characteristics of the functionally graded porous stepped cylindrical shell by using characteristic orthogonal polynomials. Int. J. Mech. Sci. 182, 105779 (2020)
He, D., Liu, T., Qin, B., Wang, Q., Zhai, Z., Shi, D.: In-plane modal studies of arbitrary laminated triangular plates with elastic boundary constraints by the chebyshev-ritz approach. Compos. Struct. 271, 114138 (2021)
Cao, D., Wang, L., Wei, J., Nie, Y.: Natural frequencies and global mode functions for flexible jointed-panel structures. J. Aerosp. Eng. 33(4), 04020018 (2020)
He, G., Cao, D., Wei, J., Cao, Y., Chen, Z.: Study on analytical global modes for a multi-panel structure connected with flexible hinges. Appl. Math. Model. 91, 1081–1099 (2021)
Cao, Y., Cao, D., He, G., Ge, X., Hao, Y.: Modelling and vibration analysis for the multi-plate structure connected by nonlinear hinges. J. Sound Vib. 492, 115809 (2021)
Cao, Y., Cao, D., He, G., Hao, Y., Ge, X., Liu, L.: Thermal–structural coupling analysis for multiple honeycomb plates connected by hinges. Int. J. Struct. Stab. Dyn. (2022). https://doi.org/10.1142/s0219455422500936,2250093
Li, R., Wang, H., Zheng, X., Xiong, S., Hu, Z., Yan, X., Xiao, Z., Xu, H., Li, P.: New analytic buckling solutions of rectangular thin plates with two free adjacent edges by the symplectic superposition method. Eur. J. Mech. A. Solids 76, 247–262 (2019)
Hu, Z., Zheng, X., An, D., Zhou, C., Yang, Y., Li, R.: New analytic buckling solutions of side-cracked rectangular thin plates by the symplectic superposition method. Int. J. Mech. Sci. 191, 106051 (2021)
Zhou, C., An, D., Zhou, J., Wang, Z., Li, R.: On new buckling solutions of moderately thick rectangular plates by the symplectic superposition method within the hamiltonian-system framework. Appl. Math. Model. 94, 226–241 (2021)
Zhou, D., Cheung, Y.K., Lo, S.H., Au, F.T.K.: Three-dimensional vibration analysis of rectangular plates with mixed boundary conditions. J. Appl. Mech. 72(2), 227–236 (2005)
Cai, D., Wang, X., Zhou, G.: Static and free vibration analysis of thin arbitrary-shaped triangular plates under various boundary and internal supports. Thin Walled Struct. 162, 107592 (2021)
Udayakumar, B., Gopal, K.V.N.: Analysis of layered panels with mixed edge boundary conditions using state space differential quadrature method. Compos. Struct. 274, 114355 (2021)
Baghaee, M., Farrokhabadi, A., Jafari-Talookolaei, R.-A.: A solution method based on lagrange multipliers and legendre polynomial series for free vibration analysis of laminated plates sandwiched by two mfc layers. J. Sound Vib. 447, 42–60 (2019)
Acknowledgements
This study is funded by the National Natural Science Foundation of China (Grant No. 12002058 and No. 11732005), Qin Xin Talents Cultivation Program, Beijing Information Science and Technology University (QXTCP C202101).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix
Appendix
The detailed expression of the elastic potential energy Eq. (4) is written as
The maximum values of energy expressions in Eq. (15) are given as
where
The element detailed expression of the characteristic stiffness and mass matrices in Eq. (18) are given as
where the superscripts (i) and (j) denote the number of the plate, respectively. The subscripts r and s denote the serial number of the general term of the Chebyshev polynomial \(\varphi_{m} (x)\) and \(\varphi_{n} (y)\).
Elements of matrices in Eq. are listed as follows
Rights and permissions
Springer Nature or its licensor holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Cao, Y., Cao, D., He, G. et al. Nonlinear dynamic modelling and analysis of multiple thin plates connected by long hinges. Nonlinear Dyn 110, 1199–1222 (2022). https://doi.org/10.1007/s11071-022-07726-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-022-07726-7