
Abstract
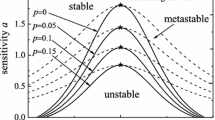
In this paper, an extended car-following model which depends not only on the difference of the optimal velocity and the current velocity but also on self-stabilizing control is presented and analyzed in detail. The self-stabilizing control is constructed into the new model by utilizing the historical traffic data (the historical velocity and the historical optimal velocity of the considered vehicle). We derive the stability condition of the extended model against a small perturbation around the homogeneous flow. Theoretical results reveal that the self-stabilizing control in historical optimal velocity difference can further stabilize traffic system on the basis of the self-stabilizing control in historical velocity difference. It is also derived that the time gap between the current traffic data and the historical ones has an important impact on the stability criterion. We clarify the advantages of the self-stabilizing control over the cooperatively driving control and the flexibility in the choice of suppressing in traffic jams. Moreover, from the nonlinear analysis to the proposed model, the historical traffic data dependence of the propagating kink solutions for jam waves is achieved by deriving the modified KdV equation near critical point by using the reductive perturbation method. Finally, theoretical results are confirmed by direct simulations.








Similar content being viewed by others
References
Bando, M., Hasebe, K., Nakayama, A.: Dynamical model of traffic congestion and numerical-simulation. Phys. Rev. E 51, 1035–1042 (1995)
Tang, T.Q., Huang, H.J.: Continuum models for freeways with two lanes and numerical tests. Chin. Sci. Bull. 49, 2097–2104 (2004)
Nagatani, T.: Traffic behavior in a mixture of different vehicles. Physica A 284, 405–420 (2000)
Nagatani, T.: Multiple jamming transitions in traffic flow. Physica A 290, 501–511 (2001)
Helbing, D., Tilch, B.: Generalized force model of traffic dynamics. Phys. Rev. E 58, 133–138 (1998)
Nagatani, T.: Stabilization and enhancement of traffic flow by the next-nearest-neighbor interaction. Phys. Rev. E 60, 6395–6401 (1999)
Jiang, R., Wu, Q., Zhu, Z.: Full velocity difference model for a car-following theory. Phys. Rev. E 64, 017101 (2001)
Tang, T.Q., Huang, H.J., Gao, Z.Y.: Stability of the car-following model on two lanes. Phys. Rev. E 72, 066124 (2005)
Zhang, H.M.: Driver memory, traffic viscosity and a viscous vehicular traffic flow model. Transp. Res. B Methodol. 37, 27–41 (2003)
Zhu, H.B., Dai, S.Q.: Analysis of car-following model considering driver’s physical delay in sensing headway. Physica A 387, 3290–3298 (2008)
Xue, Y.: Lattice models of the optimal traffic current. Acta. Phys. Sin. Chin. Ed. 53, 25–30 (2004)
Ngoduy, D.: Analytical studies on the instabilities of heterogeneous intelligent traffic flow. Commun. Nonlinear Sci. Numer. Simul. 18, 2699–2706 (2013)
Peng, G.H., Cai, X.H., Liu, C.Q., Cao, B.F., Tuo, M.X.: Optimal velocity difference model for a car-following theory. Phys. Lett. A 375, 3973–3977 (2011)
Li, Z.P., Liu, Y.C.: Analysis of stability and density waves of traffic flow model in an ITS environment. Eur. Phys. J. B 53, 367–374 (2006)
Yu, L., Shi, Z.K., Zhou, B.C.: Kink-antikink density wave of an extended car-following model in a cooperative driving system. Commun. Nonlinear Sci. Numer. Simul. 13, 2167–2176 (2008)
Yu, G.Z., Wang, P.C., Wu, X.K., Wang, Y.P.: Linear and nonlinear stability analysis of a car-following model considering velocity difference of two adjacent lanes. Nonlinear Dyn. 84, 387–397 (2016)
Guo, L.T., Zhao, X.M., Yu, S.W., Li, X.H., Shi, Z.K.: An improved car-following model with multiple preceding cars’ velocity fluctuation feedback. Physica A 471, 436–444 (2017)
Yu, S.W., Liu, Q.L., Li, X.H.: Full velocity difference and acceleration model for a car-following theory. Commun. Nonlinear Sci. 18, 1229–1234 (2013)
Peng, G.H., Sun, D.H.: A dynamical model of car-following with the consideration of the multiple information of preceding cars. Phys. Lett. A 374, 1694–1698 (2010)
Yu, S.W., Shi, Z.K.: An improved car-following model considering relative velocity fluctuation. Commun. Nonlinear Sci. 36, 319–326 (2016)
Yu, S.W., Huang, M.X., Ren, J., Shi, Z.K.: An improved car-following model considering velocity fluctuation of the immediately ahead car. Physica A 449, 1–17 (2016)
Yu, S.W., Zhao, X.M., Xu, Z.G., Shi, Z.K.: An improved car-following model considering the immediately ahead car’s velocity difference. Physica A 461, 446–455 (2016)
Yang, D., Zhu, L.L., Pu, Y.: Model and stability of the traffic flow consisting of heterogeneous drivers. J. Comput. Nonlinear Dyn. 3, 235–241 (2015)
Yang, D., Jin, P., Pu, Y., Ran, B.: Stability analysis of the mixed traffic flow of cars and trucks using heterogeneous optimal velocity car-following model. Physica A 395, 371–383 (2014)
Yu, S.W., Shi, Z.K.: An extended car-following model considering vehicular gap fluctuation. Measurement 70, 137–147 (2015)
Yu, S.W., Shi, Z.K.: An extended car-following model at signalized intersections. Physica A 407, 152–159 (2014)
Tang, T.Q., Huang, H.J., Xue, Y.: An improved two-lane traffic flow lattice model. Acta Phys. Sin. 55, 4026–4031 (2006)
Sun, D.H., Liao, X.Y., Peng, G.H.: Effect of looking backward on traffic flow in an extended multiple car-following model. Physica A 390, 631–635 (2011)
Li, X.L., Li, Z.P., Han, X.L., Dai, S.Q.: Effect of the optimal velocity function on traffic phase transitions in lattice hydrodynamic models. Commun. Nonlinear Sci. 14, 2171–2177 (2009)
Kang, Y.R., Sun, D.H.: Lattice hydrodynamic traffic flow model with explicit drivers’ physical delay. Nonlinear Dyn. 71, 531–537 (2013)
Hua, Y.M., Ma, T.S., Chen, J.Z.: An extended multi-anticipative delay model of traffic flow. Commun. Nonlinear Sci. 19, 3128–3135 (2014)
Li, X.L., Kuang, H., Fan, Y.H.: Lattice hydrodynamic model of pedestrian flow considering the asymmetric effect. Commun. Nonlinear Sci. 17, 1258–1263 (2012)
Tang, T.Q., Huang, H.J., Zhao, S.G., Xu, G.: An extended OV model with consideration of driver’s memory. Int. J. Mod. Phys. B 23, 743–752 (2012)
Yu, S.W., Shi, Z.K.: Dynamics of connected cruise control systems considering velocity changes with memory feedback. Measurement 64, 34–48 (2015)
Yu, S.W., Shi, Z.K.: An improved car-following model considering headway changes with memory. Physica A 421, 1–14 (2015)
Yu, S.W., Shi, Z.K.: The effects of vehicular gap changes with memory on traffic flow in cooperative adaptive cruise control strategy. Physica A 428, 206–223 (2015)
Yu, S.W., Zhao, X.M., Xu, Z.G., Zhang, L.C.: The effects of velocity difference changes with memory on the dynamics characteristics and fuel economy of traffic flow. Physica A 461, 613–628 (2016)
Li, Z.P., Li, W.Z., Xu, S.Z., Qian, Y.Q.: Analyses of vehicle’s self-stabilizing effect in an extended optimal velocity model by utilizing historical velocity in an environment of intelligent transportation system. Nonlinear Dyn. 80, 529–540 (2015)
Yin, C., Chen, Y.Q., Zhong, S.M.: Fractional-order sliding mode based extremum seeking control of a class of nonlinear systems. Automatica 50, 3173–3181 (2014)
Yin, C., Cheng, Y.H., Chen, Y.Q., Stark, B., Zhong, S.M.: Adaptive fractional-order switching-type control method design for 3D fractional-order nonlinear systems. Nonlinear Dyn. 82, 39–52 (2015)
Acknowledgements
This work is supported by the Natural Science Foundation of China under Grant Nos. 61773290, 51422812 and 71571107, the Central Universities under Grant No. 0800219308 and the Scientific Foundation of Shenzhen Government of China (GCZX20140508161906699).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Li, Z., Qin, Q., Li, W. et al. Stabilization analysis and modified KdV equation of a car-following model with consideration of self-stabilizing control in historical traffic data. Nonlinear Dyn 91, 1113–1125 (2018). https://doi.org/10.1007/s11071-017-3934-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-017-3934-y