
Abstract
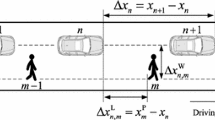
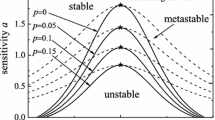
An improved optimal velocity model, which considers the velocity difference of two adjacent lanes, is presented in this paper. Using linear stability theory, the stability criterion of the new model is obtained and the neutral stability curves are plotted. By applying the reductive perturbation method, the nonlinear stability of the proposed model is also investigated and the soliton solution of the modified Korteweg–de Vries equation near the critical point is obtained to characterize the unstable region. All the theoretical analysis and numerical results demonstrate that the proposed model can characterize traffic following behaviors effectively and achieve better stability.








Similar content being viewed by others

References
Bando, M., Hasebe, K., Nakayama, A., Shibata, A., Sugiyama, Y.: Dynamical model of traffic congestion and numerical simulation. Phys. Rev. E 51(2), 1035–1045 (1995)
Brackstone, M., McDonald, M.: Car-following: a historical review. Transp. Res. Part F Traffic Psychol. Behav. 2(4), 181–196 (1999)
Chandler, R.E., Herman, R., Montroll, E.W.: Traffic dynamics: studies in car following. Oper. Res. 6(2), 165–184 (1958)
Chowdhury, D., Santen, L., Schadschneider, A.: Statistical physics of vehicular traffic and some related systems. Phys. Rep. 329(4), 199–329 (2000)
Cuesta, J.A., Martínez, F.C., Molera, J.M., Sánchez, A.: Phase transitions in two-dimensional traffic-flow models. Phys. Rev. E 48(6), 4175–4179 (1993)
Cui, Y., Cheng, R.J., Ge, H.X.: The velocity difference control signal for two-lane car-following model. Nonlinear Dyn. 78(1), 585–596 (2014)
Edie, L.C.: Car-following and steady-state theory for noncongested traffic. Oper. Res. 9(1), 66–76 (1961)
Gazis, D.C., Herman, R., Potts, R.B.: Car-following theory of steady-state traffic flow. Oper. Res. 7(4), 499–505 (1959)
Gazis, D.C., Herman, R., Rothery, R.W.: Nonlinear follow-the-leader models of traffic flow. Oper. Res. 9(4), 545–567 (1961)
Ge, H.X.: Modified coupled map car-following model and its delayed feedback control scheme. Chin. Phys. B 20(9), 1–8 (2011)
Ge, H.X., Cheng, R.J., Dai, S.Q.: Kdv and kink–antikink solitons in car-following models. Phys. A Stat. Mech. Appl. 357(3), 466–476 (2005)
Ge, H.X., Dai, S.Q., Dong, L.Y., Xue, Y.: Stabilization effect of traffic flow in an extended car-following model based on an intelligent transportation system application. Phys. Rev. E 70(6), 1–6 (2004)
Ge, H.X., Meng, X.P., Ma, J., Lo, S.M.: An improved car-following model considering influence of other factors on traffic jam. Phys. Lett. A 377(1), 9–12 (2012)
Gordon, W.J., Newell, G.F.: Closed queuing systems with exponential servers. Oper. Res. 15(2), 254–265 (1967)
Helbing, D., Tilch, B.: Generalized force model of traffic dynamics. Phys. Rev. E 58(1), 133 (1998)
Herman, R., Montroll, E.W., Potts, R.B., Rothery, R.W.: Traffic dynamics: analysis of stability in car following. Oper. Res. 7(1), 86–106 (1959)
Jia, Y., Du, Y., Wu, J.: Stability analysis of a car-following model on two lanes. Math. Problems Eng. 2014, 1–9 (2014)
Jiang, R., Wu, Q., Zhu, Z.: Full velocity difference model for a car-following theory. Phys. Rev. E 64(1), 1–4 (2001)
Jiang, R., Wu, Q.S., Zhu, Z.J.: A new continuum model for traffic flow and numerical tests. Transp. Res. Part B Methodol. 36(5), 405–419 (2002)
Komatsu, T.S., Sasa, S.: Kink soliton characterizing traffic congestion. Phys. Rev. E 52(5), 5574–5603 (1995)
Konishi, K., Kokame, H., Hirata, K.: Coupled map car-following model and its delayed-feedback control. Phys. Rev. E 60(4), 4000–4007 (1999)
Lenz, H., Wagner, C., Sollacher, R.: Multi-anticipative car-following model. Eur. Phys. J. B-Condens. Matter Complex Syst. 7(2), 331–335 (1999)
Liu, F., Cheng, R., Zheng, P., Ge, H.: TDGL and mKdV equations for car-following model considering traffic jerk. Nonlinear Dyn. 83(1), 793–800 (2016)
Muramatsu, M., Nagatani, T.: Soliton and kink jams in traffic flow with open boundaries. Phys. Rev. E 60(1), 180–187 (1999)
Nagatani, T.: Stabilization and enhancement of traffic flow by the next-nearest-neighbor interaction. Phys. Rev. E 60(6), 6395–6401 (1999)
Nagatani, T.: Density waves in traffic flow. Phys. Rev. E 61(4), 3564–3570 (2000)
Nagatani, T.: The physics of traffic jams. Rep. Prog. Phys. 65(9), 1331–1386 (2002)
Nagatani, T., Nakanishi, K., Emmerich, H.: Phase transition in a difference equation model of traffic flow. J. Phys. A Math. Gen. 31(24), 5431–5438 (1998)
Nagel, K., Herrmann, H.J.: Deterministic models for traffic jams. Phys. A Stat. Mech. Appl. 199(2), 254–269 (1993)
Nagel, K., Schreckenberg, M.: A cellular automaton model for freeway traffic. J. Rhys. I 2(12), 2221–2229 (1992)
Newell, G.F.: A theory of platoon formation in tunnel traffic. Oper. Res. 7(5), 589–598 (1959)
Newell, G.F.: Nonlinear effects in the dynamics of car following. Oper. Res. 9(2), 209–229 (1961)
Peng, G.H., Cai, X.H., Liu, C.Q., Cao, B.F., Tuo, M.X.: Optimal velocity difference model for a car-following theory. Phys. Lett. A 375(45), 3973–3977 (2011)
Pipes, L.A.: An operational analysis of traffic dynamics. J. Appl. Phys. 24(3), 274–281 (1953)
Sawada, S.: Generalized optimal velocity model for traffic flow. Int. J. Modern Phys. C 13(1), 1–12 (2002)
Tang, T., Shi, W., Shang, H., Wang, Y.: A new car-following model with consideration of inter-vehicle communication. Nonlinear Dyn 76(4), 2017–2023 (2014)
Tang, T.Q., Huang, H.J., Gao, Z.Y.: Stability of the car-following model on two lanes. Phys. Rev. E 72(6), 066124 (2005)
Tatsumi, T., Kida, S.: Statistical mechanics of the burgers model of turbulence. J. Fluid Mech. 55(4), 659–675 (1972)
Whitham, G.: Exact solutions for a discrete system arising in traffic flow. In: Proceedings of the Royal Society of London A: Mathematical, Physical and Engineering Sciences, vol. 428, pp. 49–69. The Royal Society (1990)
Yu, S.W., Liu, Q.L., Li, X.H.: Full velocity difference and acceleration model for a car-following theory. Commun. Nonlinear Sci. Numer. Simul. 18(5), 1229–1234 (2013)
Yu, X.: Analysis of the stability and density waves for traffic flow. Chin. Phys. 11(11), 1128–1134 (2002)
Zheng, L.J., Tian, C., Sun, D.H., Liu, W.N.: A new car-following model with consideration of anticipation driving behavior. Nonlinear Dyn. 70(2), 1205–1211 (2012)
Zhou, J.: An extended visual angle model for car-following theory. Nonlinear Dyn. 81(1), 549–560 (2015)
Acknowledgments
This research was funded partially by the National Science Foundation of China under Grant #61371076.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Yu, G., Wang, P., Wu, X. et al. Linear and nonlinear stability analysis of a car-following model considering velocity difference of two adjacent lanes. Nonlinear Dyn 84, 387–397 (2016). https://doi.org/10.1007/s11071-015-2568-1
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-015-2568-1