
Abstract
In this paper, we consider the control problem of a flexible string system in the presence of input saturation. The dynamics of the string system is represented by the coupled partial differential equation and ordinary differential equations. Firstly, in order to suppress the transverse vibration of the flexible string system, full state feedback control is proposed by introducing a well-defined integral Lyapunov function. An auxiliary system is introduced to handle the effect of input saturation, and the proof for the existence and the uniqueness of the solution of the closed-loop system is presented. The exponential stability is achieved through rigorous analysis without any simplification of the dynamics. Subsequently, for the case that some of system states cannot be directly obtained, output feedback control is developed and uniform ultimate boundedness is guaranteed. Finally, the results are illustrated with numerical simulations for verifying the control performance.












Similar content being viewed by others


Abbreviations
- \(L\) :
-
Length of the string
- \(M\) :
-
Mass of the tip payload
- \(\rho \) :
-
Mass per unit length of the string
- \(T\) :
-
Tension of the string
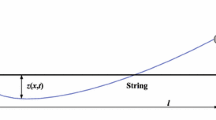
- \(w(x,t)\) :
-
Deflection of the string at the position \(x\) for time \(t\)
- \(w(L,t)\) :
-
Boundary deflection of the string
- \(\dot{w}(L,t)\) :
-
Velocity of the tip payload
- \(w'(L,t)\) :
-
Boundary slope of the string
- \(\dot{w}'(L,t)\) :
-
Time-varying rate of the boundary slope
- \(u(t)\) :
-
Boundary control input applied on the tip payload
References
Wen, C., Zhou, J., Liu, Z., Su, H.: Robust adaptive control of uncertain nonlinear systems in the presence of input saturation and external disturbance. IEEE Trans. Automat. Contr. 56(7), 1672–1678 (2011)
Chen, M., Ge, S.S., Ren, B.: Adaptive tracking control of uncertain mimo nonlinear systems with input constraints. Automatica 47(3), 452–465 (2011)
Chen, M., Ge, S.S., How, B.: Robust adaptive neural network control for a class of uncertain mimo nonlinear systems with input nonlinearities. IEEE Trans. Neural Netw. 21(5), 796–812 (2010)
Adetola, V., DeHaan, D., Guay, M.: Adaptive model predictive control for constrained nonlinear systems. Syst. Control Lett. 58(5), 320–326 (2009)
Karason, S., Annaswamy, A.: Adaptive control in the presence of input constraints. IEEE Trans. Automat. Contr. 39(11), 2325–2330 (1994)
Annaswamy, A., Karason, S.: Discrete-time adaptive control in the presence of input constraints. Automatica 31(10), 1421–1431 (1995)
Huang, D., Xu, J.-X., Li, X., Xu, C., Yu, M.: D-type anticipatory iterative learning control for a class of inhomogeneous heat equations. Automatica 49(8), 2397–2408 (2013)
Wang, J.-M., Ren, B., Krstic, M.: Stabilization and Gevrey regularity of a Schrödinger equation in boundary feedback with a heat equation. IEEE Trans. Automat. Contr. 57(1), 179–185 (2012)
Wu, H.-N., Wang, J.-W., Li, H.-X.: Design of distributed \(H_\infty \) fuzzy controllers with constraint for nonlinear hyperbolic PDE systems. Automatica 48(10), 2535–2543 (2012)
Guo, B.-Z., Shao, Z.-C.: Stabilization of an abstract second order system with application to wave equations under non-collocated control and observations. Syst. Control Lett. 58(5), 334–341 (2009)
Bekiaris-Liberis, N., Krstic, M.: Compensating the distributed effect of a wave PDE in the actuation or sensing path of MIMO LTI systems. Syst. Control Lett. 59(11), 713–719 (2010)
Christofides, P.D.: Nonlinear and Robust Control of PDE Systems: Methods and Applications to Transport-Reaction Processes. Birkhauser, Boston, USA (2001)
Wu, H.-N., Wang, J.-W.: Observer design and output feedback stabilization for nonlinear multivariable systems with diffusion PDE-governed sensor dynamics. Nonlinear Dyn. 72(3), 615–628 (2013)
Wang, J.-W., Li, H.-X., Wu, H.-N.: Distributed proportional plus second-order spatial derivative control for distributed parameter systems subject to spatiotemporal uncertainties. Nonlinear Dyn. 76(4), 2041–2058 (2014)
Xu, C., Schuster, E., Vazquez, R., Krstic, M.: Stabilization of linearized 2D magnetohydrodynamic channel flow by backstepping boundary control. Syst. Control Lett. 57(10), 805–812 (2008)
Castillo, F., Witrant, E., Prieur, C., Dugard, L.: Boundary observers for linear and quasi-linear hyperbolic systems with application to flow control. Automatica 49(11), 3180–3188 (2013)
Do, K.D., Pan, J.: Boundary control of transverse motion of marine risers with actuator dynamics. J. Sound Vib. 318(4–5), 768–791 (2008)
He, W., Ge, S.S., How, B.V.E., Choo, Y.S., Hong, K.-S.: Robust adaptive boundary control of a flexible marine riser with vessel dynamics. Automatica 47(4), 722–732 (2011)
He, W., Ge, S.S., Zhang, S.: Adaptive boundary control of a flexible marine installation system. Automatica 47(12), 2728–2734 (2011)
He, W., Ge, S.S., How, B.V.E., Choo, Y.S.: Dynamics and Control of Mechanical Systems in Offshore Engineering. Springer, London, UK (2013)
He, W., Zhang, S., Ge, S. S.: Adaptive control of a flexible cranesystem with the boundary output constraint. IEEE Trans. Ind. Electron. 61(8), 4126–4133 (2014)
Endo, K., Matsuno, F., Kawasaki, H.: Simple boundary cooperative control of two one-link flexible arms for grasping. IEEE Trans. Automat. Contr. 54(10), 2470–2476 (2009)
Le Gall, P., Prieur, C., Rosier, L.: Output feedback stabilization of a clamped-free beam. Int. J. Control 80(8), 1201–1216 (2007)
Yang, K.-J., Hong, K.-S., Matsuno, F.: Robust boundary control of an axially moving string by using a PR transfer function. IEEE Trans. Automat. Contr. 50(12), 2053–2058 (2005)
Yang, K.-J., Hong, K.-S., Matsuno, F.: Energy-based control of axially translating beams: Varying tension, varying speed, and disturbance adaptation. IEEE Trans. Control Syst. Technol. 13(6), 1045–1054 (2005)
Nayfeh, S.A., Nayfeh, A.H., Mook, D.T.: Nonlinear response of a taut string to longitudinal and transverse end excitation. J. Vib. Control 1(3), 307–334 (1995)
Zulli, D., Luongo, A.: Nonlinear energy sink to control vibrations of an internally nonresonant elastic string. Meccanica (2014). doi:10.1007/s11012-014-0057-0
Guo, W., Guo, B.-Z.: Parameter estimation and non-collocated adaptive stabilization for a wave equation subject to general boundary harmonic disturbance. IEEE Trans. Automat. Contr. 58(7), 1631–1643 (2013)
Smyshlyaev, A., Cerpa, E., Krstic, M.: Boundary stabilization of a 1-D wave equation with in-domain antidamping. SIAM J. Control Optim. 48(6), 4014–4031 (2010)
Wu, H.-N., Li, H.-X.: Finite-dimensional constrained fuzzy control for a class of nonlinear distributed process systems. IEEE Trans. Syst. Man Cybern. B Cybern. 37(5), 1422–1430 (2007)
He, W., Zhang, S., Ge, S.S.: Boundary control of a flexible riser with the application to marine installation. IEEE Trans. Ind. Electron. 60(12), 5802–5810 (2013)
Qu, Z.: Robust and adaptive boundary control of a stretched string on amoving transporter. IEEE Trans. Automat. Contr. 46(3), 470–476 (2001)
d’Andrea Novel, B., Coron, J.M.: Exponential stabilization of an overhead crane with flexible cable via a back-stepping approach. Automatica 36, 587–593 (2000)
Krstic, M.: Compensating a string PDE in the actuation or sensing path of an unstable ODE. IEEE Trans. Automat. Contr. 54(6), 1362–1368 (2009)
Luongo, A., Rega, G., Vestroni, F.: Planar non-linear free vibrations of an elastic cable. Int. J. Non-Linear Mech. 19(1), 39–52 (1984)
Krstic, M., Smyshlyaev, A.: Boundary Control of PDEs: A Course on Backstepping Designs. Society for Industrial and Applied Mathematics, Philadelphia, USA (2008)
Nguyen, Q.C., Hong, K.-S.: Simultaneous control of longitudinal and transverse vibrations of an axially moving string with velocity tracking. J. Sound Vib. 331(13), 3006–3019 (2012)
Krstic, M., Guo, B.-Z., Balogh, A., Smyshlyaev, A.: Output-feedback stabilization of an unstable wave equation. Automatica 44(1), 63–74 (2008)
Cazenave, T., Haraux, A., Martel, Y.: An Introduction to Semilinear Evolution Equations. Clarendon Press, Oxford (1998)
Dautray, R., Lions, J.-L.: Mathematical Analysis and Numerical Methods for Science and Technology: Volume 3 Spectral Theory and Applications, vol. 3. Springer, Berlin (2000)
He, W., Ge, S.S.: Vibration control of a nonuniform wind turbine tower via disturbance observer. IEEE/ASME Trans. Mechatron. 20(1), 237–244 (2015)
He, W., Zhang, S., Ge, S.S.: Robust adaptive control of a thruster assisted position mooring system. Automatica 50(7), 1843–1851 (2014)
He, W., Ge, S.S.: Robust adaptive boundary control of a vibrating string under unknown time-varying disturbance. IEEE Trans. Control Syst. Technol. 20(1), 48–58 (2012)
Canbolat, H., Dawson, D., Rahn, C., Nagarkatti, S.: Adaptive boundary control of out-of-plane cable vibration. J. Appl. Mech. 65, 963–969 (1998)
Zhou, J., Wen, C.: Adaptive Backstepping Control of Uncertain Systems: Nonsmooth Nonlinearities, Interactions or Time-Variations. Springer, Berlin, Germany (2008)
Queiroz, M.S., Dawson, D.M., Nagarkatti, S.P., Zhang, F.: Lyapunov Based Control of Mechanical Systems. Birkhauser, Boston, USA (2000)
Nguyen, T.L., Do, K.D., Pan, J.: Boundary control of two-dimensional marine risers with bending couplings. J. Sound Vib. 332(16), 3605–3622 (2013)
Behtash, S.: Robust output tracking for nonlinear system. Int. J. Control 51, 1381–1407 (1990)
He, W., Sun, C., Ge, S.S.: Top tension control of a flexible marine riser by using integral-barrier lyapunov function. IEEE/ASME Trans. Mechatron. 20(2), 497–505 (2015)
He, W., Zhang, S., Ge, S.S.: Adaptive boundary control of a nonlinear flexible string system. IEEE Trans. Control Syst. Technol. 22(3), 1088–1093 (2014)
Acknowledgments
The authors would like to thank the Editor-In-Chief, the Associate Editor and the anonymous reviewers for their constructive comments which helped improve the quality and presentation of this paper. This work was supported by the National Natural Science Foundation of China under Grant 61203057 and 61403063, the National Basic Research Program of China (973 Program) under Grant 2014CB744206, and the Fundamental Research Funds for the China Central Universities of UESTC under Grant ZYGX2013Z003.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
He, W., He, X. & Ge, S.S. Boundary output feedback control of a flexible string system with input saturation. Nonlinear Dyn 80, 871–888 (2015). https://doi.org/10.1007/s11071-015-1913-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-015-1913-8