
Abstract
Automated detection of snow avalanches is an important tool for avalanche forecasting and for assessing the effectiveness of avalanche control measures at bad visibility. Avalanche detection systems are usually based on infrasound, seismic, or radar signals. Within this study, we compared three different types of avalanche detection systems: one avalanche radar, one infrasound array system consisting of four infrasound sensors, and a newly developed single sensor infrasound system. A special focus is given to the new single sensor system, which is a low cost, easy to install system, originally designed for the detection of debris flows and debris floods. Within this work, we analysed how this single sensor system could be adapted to detect also snow avalanches. All three systems were installed close to a road near Ischgl (Tyrol, Austria) at the avalanche-exposed Paznaun Valley. The valley is endangered by two avalanche paths which are controlled by several avalanche towers. The radar system detected avalanches accurately and reliably but was limited to the particular avalanche path towards which the radar beam was directed. The infrasound array could detect avalanches from all surrounding avalanche paths, however, with a higher effort for installation. The newly tested single infrasound sensor system was significantly cheaper and easier to install than the other two systems. It could also detect avalanches form all directions, although without information about the direction. In summary, each of the three different systems was able to successfully detect avalanches and had its particular strengths and weaknesses, which should be considered according to the specific requirements of a particular practical application.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
The ability of immediate avalanche detection is essential for avalanche management and avalanche forecasting. Since automated artificial release of avalanches with, e.g. avalanche towers is nowadays used to protect ski resorts as well as traffic infrastructure and villages, avalanche control authorities need to be able to examine the effectiveness of explosives also in case of poor visibility and during the night. The demand for reliable detection of natural as well as artificially released avalanches is therefore rising. Systems for automatic detecting avalanches (either artificial released or spontaneous) are also gaining importance for local authorities and operators of traffic lines.
Within this paper we present and evaluate three different avalanche detection systems which are based on the two most promising technologies: radar and infrasound. All three systems were installed at a key section of the Silvretta Straße B188 (Ischgl, Austria), which is the only traffic link to the village and ski resort Galtür during the winter and is endangered by two avalanche paths (the Grosstal avalanche channel and the Hoher Zug avalanche channel).
To protect the Silvretta road seven avalanche towers were installed by Wyssen avalanche control in 2011 together with a radar which monitors the Grosstal avalanche path (Kogelnig et al. 2013). In 2012, an infrasound array (Marchetti et al. 2015) with four sensors was placed in a forest close to the radar unit. Finally, in 2013 the newest system based on a single infrasound sensor was installed. In the first year, the single sensor system was installed directly next to the infrasound array and in the following years it was placed next to the radar system.
Moreover, this single infrasound sensor system was tested in the ski resort Silvretta Montafon in Vorarlberg. Within this work, we put special emphasis on the single sensor system, as it is a low cost and easy to install alternative to conventional avalanche detection systems.
2 Avalanche detection systems
2.1 Avalanche Doppler radar
The radar operates according to the principle of a coherent pulse Doppler radar (Koschuch et al. 2015). A high-frequency signal in the X-band (10.425 GHz) is pulse-modulated in a high-frequency switch, amplified to an output power of about 1 W and radiated from a parabolic antenna to the detection area. The reflected beam from the observed area returns to the antenna and is recorded by the receiver. If an object is moving within the detection area with the velocity v, the reflected signal will experience a frequency shift \(f_{\text {D}}\) (Doppler effect) according to Eq. 1:
where \(f_{\text {Doppler}}\) is the frequency of the reflected signal, \(f_{0}\) is the frequency of the emitted wave, and c is the velocity of electromagnetic waves in the medium air.
The frequency shift of the reflected radar signal is proportional to the velocity of the moving object. It is positive for approaching objects and negative for objects veering away. The velocity of the moving object can thus be determined via frequency analyses of the reflected radar beam. The resulting velocity spectrum has well defined peaks for compact objects with a single speed and becomes broad banded for avalanches or debris flows where many objects are moving at different speeds.
The reflected radar signal is sampled by an analogue–digital converter directly within the receiver. Afterwards, a digital signal processor calculates the velocity spectrum, which can then be edited and displayed on a user interface or be processed by an automatic software which can be programmed to generate event alarms.

a Scheme of typical detection situation with range gates number n, range gate length \(r_{\text {RG}}\), and range R. b View of the monitored area of the radar at Ischgl (dotted black line)
Figure 1a shows the monitoring of a mountain slope with a radar signal. The signal consists of a pulse-shaped electromagnetic wave packet. The discrete time points 1–8 are located exactly at the distance of spatial pulse length corresponding to range gate length \(r_{\text {RG}}\). Therefore, the range gate length determines the spatial resolution for detections in the observed area. The maximum range for detecting moving objects, such as snow avalanches, with a cross section of 1 \(\hbox {m}^{2}\) in heavy weather condition (rain/snow) is 2 km. The range gate length is chosen between 15 and 250 m, and it is possible to measure velocities between 1 and 300 km/h. The radar monitoring of snow avalanches is generally very reliable, detecting also small avalanches without serious false alarms. The radar used in Ischgl was designed to monitor a relatively narrow angle and can therefore detect avalanches on one avalanche path.
2.2 Avalanche detection based on infrasound
2.2.1 Infrasound signals of avalanches
Infrasound technology is widely used for detection of different natural (e.g. volcanoes, debris flows, meteorites, earthquakes) and artificial phenomena (e.g. explosions, sonic boom). Infrasound waves are low-frequency (\(<20\,\hbox {Hz}\)) longitudinal pressure waves travelling through the air at the speed of sound (343 m/s, at standard temperature and pressure). Mass movement-generated infrasound signals have specific amplitude and occupy a frequency band from 0.001 to 20 Hz (e.g. Kogelnig 2012). Infrasound can travel thousands of kilometres and remain detectable over such distances. This is due to the frequency dependency of atmospheric attenuation, absorbing high-frequency (audible and ultra-) sound more than low-frequency (infra-) sound (Pilger et al. 2009). Past studies about infrasound signals produced by snow avalanches (Firstov et al. 1992; Naugolnykh et al. 2002) conclude that the infrasonic signals of snow avalanches are mainly produced by the turbulent motion at the avalanche front (powder cloud). Therefore, the amplitudes of wet-snow avalanches are normally much lower than the amplitudes produces by powder avalanches of the same size.
The first attempts to monitor avalanches with infrasound (Sommerfeld et al. 1977, 1983; Bedard 1989, 1994; Chritin et al. 2003; Scott 2002, 2004, 2006) already showed the viability of infrasonic waves for detecting and monitoring these types of mass movements. However, the usage of infrasound for automatic detection of avalanches was rare (Chritin et al. 2003; Scott et al. 2007; Ulivieri et al. 2011), because infrasound is strongly contaminated by noise produced by natural (wind, earthquakes) and artificial sources (planes, helicopters, industry). But the increasing demand for automated avalanche monitoring systems in order to verify artificial avalanche release and for mitigation efforts at facilities and transportation corridors has led to improvement of sensor set-ups, data processing, and algorithms for infrasound avalanche detections in the recent years (Ulivieri et al. 2011, 2012; Thüring et al. 2014; Marchetti et al. 2015).
2.2.2 Infrasound array system
In the winters 2012/2013 and 2013/2014, an infrasound array based on four sensors (Marchetti et al. 2015) was in operation at the test site Ischgl in a forest close to the Doppler Radar (Koschuch et al. 2015). The four elements of the array were placed in a triangular geometry with an aperture (maximum distance between two elements) of approximately 150 m. As infrasound sensors custom-made differential pressure transducers, with a sensitivity of 25 mV/Pa and a frequency range from 0.01 to 500 Hz has been used (Marchetti et al. 2009). The data were recorded with a sampling rate of 100 samples/s on a 24-bit Guralp CMG-DM24 digitizer and was band-pass filtered between 0.5 and 20 Hz.
The advantage of the array technology compared to a single sensor set-up is an increase in the signal-to-noise ratio and the possibility to identify the direction of the signal. The better signal-to-noise ratio can be achieved by the assumption that a signal is correlated at different sensors, while noise does not show any correlation. This correlation can be used as a detection criteria, so that for a detection the infrasound signal has to be correlated across the array for a specific time span (5 s at the used set-up) and the multichannel cross-correlation has to exceed a threshold (e.g. Ripepe et al. 2002). An avalanche consists of multiple detections depending on the duration of the event and the processing windowing.
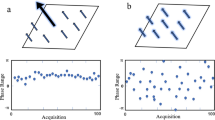
The infrasonic ray path is determined by the time shifts d\(t_{ij}\) between different pairs of sensors i, j of a planar wave field propagating across the array (Ulivieri et al. 2011). Based on these time shifts between different sensors, the back azimuth \(\alpha\) and the apparent velocity \(c_\mathrm{{a}}\) of an event can be identified. The back azimuth describes the direction where the signal is coming from (Fig. 2). Its resolution depends on the array aperture and frequency content of the recorded signal.

Overview of the infrasound array geometry and corresponding wave parameters: back azimuth \(\alpha\) and take-off angle \(\gamma\) (Marchetti et al. 2015)
This azimuthal resolution was determined at the test site Ischgl by the explosive activity of the fixed avalanche towers at the Grosstal avalanche channel and was smaller than \(1^\circ\). The apparent velocity is the velocity of an infrasound signal which is propagating across the plane of the array elements. The apparent velocity is reflecting the elevation of the signal source which is identified by the infrasonic take-off angle \(\gamma\) (angel between infrasound ray and the direction normal to the array plane, see Fig. 2). It is derived from the sound propagation velocity c at local temperature and humidity as described in Eq. 2.
For the automatic detection of an avalanche at the Grosstal, four criteria were defined:
-
1.
Detections must show a back azimuth rotation \({>}5^\circ\) and have values included in the \(310^\circ\)–\(320^\circ\) North range.
-
2.
The apparent velocity must decrease by more than 10 m/s.
-
3.
The peak amplitude at the array must be larger than 0.05 Pa.
-
4.
The duration of the infrasound event (fulfilling 3.) must be longer than 10 s.
The first two criteria reflect the kinematics of the avalanche, while the last two criteria depend on the avalanche size and the distance between the avalanche path and the detection system. All these criteria were defined based on analyses of all possible avalanches at the test site Ischgl and have to be adapted according to the local situation for every site.
Figure 3 shows an example of the analyses software displaying the avalanche detections at the test site Ischgl, whereby artificially controlled avalanches are marked in red, the explosions are in yellow and the natural avalanche activity is displayed in green. A picture of the array system setup installed in Ischgl is shown in Fig. 4.

Web application of the infrasound detection system (Kogelnig et al. 2013; the table below is restricted due to image size)

Set-up of the infrasound array at Ischgl. a Central unit of the array with power supply and place of single sensor system in the first year (2013/2014). b One of the four infrasound sensors of the array
The automatic detection of avalanches based on back azimuth and apparent velocity of infrasonic avalanche signals showed no false alarms with respect to the Doppler radar at the test site Ischgl and offered a robust method to identify number and the time of snow avalanches occurring all around the array.
2.2.3 Single infrasound sensor system
The main idea of this newly developed system was to design an easy to install and low-cost detection system for different kind of alpine mass movements. As initial point we used a system, which was originally designed for the detection of debris flows and debris floods (Schimmel and Hübl 2013b, 2015, 2016). Within this work, we now describe how a single infrasound sensor system can also be used for detecting avalanches in real time directly on site.
The detection system used for debris flows and debris flood is based on a combination of two sensors, a infrasound and a seismic sensor placed co-located and a microcontroller which runs the detection algorithm. Unfortunately, the amplitudes of the seismic signals of avalanches measured at the test site Ischgl were much lower than that of debris flows or debris floods. This results in a very low signal-to-noise ration at longer distances between avalanche path and sensor location, like the set-up in Ischgl. So the detection methods used by the debris flow detection system [and in a first version for avalanche detection (Schimmel and Hübl 2013a)], based on the combination of seismic and infrasound signals, were not usable for the detection of avalanches and the system was redesigned to omit the seismic sensor and use a detection algorithm which is only based on the infrasound signal. The use of a more sensitive seismic sensor (e.g. 3-components seismometers) might result in more useful seismic signals for the event detection, but the concept of an inexpensive monitoring system induced to try an approach without the seismic sensor.
The system consisted of an infrasound sensor Chaparral Physics Model 24 which has a frequency range from 0.1 to 200 Hz and a sensitivity of 2 V/Pa. As data logger and for the calculation of the detection algorithm, a microcontroller of the type Stellaris Luminary evaluation board LM3S8962 with a 50 MHz ARM Cortex-M3 microprocessor was used. The evaluation board offers the possibility to continuously store the data on a microSD card for up to four month, and it also provides Ethernet access for remote control and download of data. The software for this microcontroller has been written in C and is based on the open source real-time operating system “FreeRTOS”.
The infrasound signal is adapted to the ADC input range of the microcontroller with an inverting amplifier with a gain of 0, 2 which results in a final resolution of 400 mV/Pa. The input from the infrasound sensor is filtered by a high-pass filter based on a RC-circuit with a cut-off frequency below 1 Hz to eliminate the constant component. The signal is recorded by the microcontroller at a sample rate of 100 samples/s with a 32\(\times\) hardware oversampling to avoid aliasing effects. Every second the infrasound signal is processed by Fast Fourier Transform (FFT), whereby the Bluestein FFT algorithm (also called the chirp z-transform algorithm; Rabiner et al. 1969) with 100 samples is used. This algorithm computes the discrete Fourier transform (DFT) of non-power of two sizes by re-expressing the DFT as a convolution. The detection algorithm run afterwards, analyses the signal with respect to time, time-frequency, and amplitude. The detection algorithm is similar to the algorithm already used at the debris flow detection system and is based on comparing the development of the signal over time in different frequency bands. The infrasound signals of avalanches present a typical divergence over time within these frequency bands (Kogelnig et al. 2011), so the average amplitudes of these different frequency bands can be used as detection criteria. For the detection of an avalanche, the average amplitude of the avalanche frequency band \(\overline{A}_{\text {Aval}}\) has to be above the average amplitudes of the bands below and above (\(\overline{A}_{\text {high}}\) and \(\overline{A}_{\text {low}}\)). Wind noise dominates the amplitudes at the lower band.
The distribution criteria are:
As a second criteria, the average amplitude of this avalanche frequency band has to be over a certain limit for a certain time, whereby two different limits are used to distinguish between different event sizes. A limit of 10 mPa is used to detect even small events (\(A_{\text {LimitL1}}\)), and a limit of 20 mPa for events with higher magnitude (\(A_{\text {LimitL2}}\)) is used. These limits can be adapted according to the application of the detection system, the distance from the avalanche path to the system and the background noise. These different amplitudes limits are not foreseen to ensure a real classification of the event size, rather they offer two different types of alarms: at Level 1 even smaller avalanches can be detected, but it is highly susceptible to false alarms, at Level 2 only larger signals are detected and therefore the false alarm rate is much lower.
The amplitudes criteria for Level 1 are:
The amplitudes criteria for Level 2 are:
Third criteria are used mainly to filter artificial interfering noise. At these criteria, the variance of the amplitudes at the avalanche frequency band (\(AVar_{\text {Aval}}\)) has to be below a limit (\(AVar_{\text {Limit}}\)). Since artificial noises are often small banded, the variance of such signals is high compared to the variance of avalanches, so these criteria can be used to eliminate artificial false alarms.
The variance criteria are:
If all these criteria are met for the detection time (\(T_{\text {det}}\)) an event detection is signed out.
This detection principle is shown in Fig. 5, and Table 1 shows the currently used values for the limits and time span used in this algorithm. The limits and time span for the detection algorithm have been determined in an analysing process of different avalanches and interfering signals, and there is a frequent fine tuning of the algorithm and the parameters to increase the detection probability and reduce false alarms.

Illustration of an event detection depicted in a running spectrum of an avalanche infrasound signal
The main challenge with our detection method is the short event duration of avalanches compared to the longer duration of debris flows. Due to this short duration, a low detection time (\(T_{\text {det}}\)) is necessary which results in a higher susceptibility to false alarms. The main advantage of such a system is that it is low cost, easy to install and that the use of a microcontroller makes it very flexible and adaptable for the special requirements of a warning system in harsh alpine environments. Also the energy consumption of this system is very low (below 1.5 W) which makes this set-up very useful for stand alone stations with solar power supply. Figure 6 shows a photo of the system set-up as used at Ischgl and Silvretta Montafon.

Photo of the single infrasound sensor system
3 Field sites
3.1 Avalanche detection at Ischgl
All three systems were installed near the Austrian state road Silvretta Straße B188 close to the ski-village Ischgl. This road is an important transport link in the avalanche-exposed Paznaun Valley and is closed regularly due to high avalanche risk. To protect one key section of this road, seven avalanche towers (remote controlled avalanche releasing systems working with explosives) were installed on two avalanche paths in 2011, together with a radar unit for avalanche detection at one of this avalanche channels. Additionally, from 2012 to 2014 an infrasound array consisting of five sensors was installed in a forest close to the radar unit (Marchetti et al. 2015; Kogelnig et al. 2013) and since 2013 the new detection system based on a single infrasound sensor has been also installed there. The detection systems can be principally used for examining the effectiveness of explosions in case of poor visibility and at night, but also for information about spontaneous avalanche activity. An overview of the avalanche paths and the location of the detection systems and avalanche towers is given in Fig. 7a, b shows the avalanche path monitored by the radar, the radar set-up, infrasound detection system, and the position of the avalanche towers.

a Overview of the avalanche paths, system location and avalanche towers at the Silvretta road close to Ischgl (Source google maps). The area monitored by the radar is marked in blue. b Close view of the single infrasound sensor system, the avalanche radar and the main avalanche path Grosstal
Two of the avalanche towers are located on the eastern hill slop (Hoher Zug avalanche channel) in an altitude of \({\sim }2200\,\hbox {m}\) a.s.l. and at the main avalanche path on the western hill slope (Grosstal avalanche channel) five avalanche towers are installed in the altitude of \({\sim }2300\,\hbox {m}\) a.s.l. The western hill slope is monitored by the radar which is installed in an altitude of 1380 m a.s.l. closed to the road. The Grosstal avalanche channel has a starting zone area of \(160{,}000\,\hbox {m}^2\) and a path length of 1800 m. The infrasound array and the single sensor system were installed closed to the radar. The distance between the avalanche path and the system set-ups is approximately 1.7 km.
The following section shows an example of event detection by the single infrasound sensor detection system (AMM-Detection) in the case of three different avalanches.
3.2 Avalanche detection at Silvretta Montafon
Additionally to the study site at Ischgl, the AMM-Detection system was also installed at the Austrian ski resort Silvretta Montafon in Vorarlberg. The system was tested in the winter season 2013/2014 and 2014/2015 at two different locations to detect artificially released avalanches. The different system locations and the avalanche paths are shown in the overview in Fig. 8. The set-up at location 1 in the season 2013/2014 did not work satisfying, because of the high noise level and the very small released avalanches so the set-up was changed to the location 2 in the season 2014/2015. The avalanche towers at location 2 are at an altitude of 2350–2400 m a.s.l., the altitude of the detection system was at 2250 m a.s.l., and the distance avalanche path to detection system was about 450 m. Two different set-ups have been tested in the winter 2014/2015 at location 2: one system was placed on the surface next to a snow cannon so that it was protected against wind only by the snow cover, while another system was placed in the technique camber for the snow cannon, so that this station was better protected against wind.

a Overview of the avalanche paths, system location and avalanche towers in the ski resort Silvretta Montafon (Source google maps). b View of the location 2 equipped with the detection system in the season 2014/2015
4 Avalanches detected
4.1 Avalanche on the 29.01.2014 in Ischgl
This example shows a natural avalanche which was recorded on the 29.01.2014. This medium-sized avalanche was only detected by the infrasound array and the single sensor system and was not in the range of the radar system. The array system detected the avalanche at 15:05 with a peak pressure of 694 mPa and a duration of 39 s. Figure 9 shows the infrasound signal recorded from the AMM-detection system, whereby the recording of this file has started at 14:34. Looking at the infrasound signal in Fig. 9, it seems that there was a small avalanche at 1843 s before the main event occurred between 1872 and 1892 s. It is not clear if there has been two slides or maybe this effect could be also produced by the avalanche path and the position of the infrasound sensor as described at the second avalanche example.

Infrasound data of an avalanche monitored at Ischgl on 29.01.2014. Signals are represented with a common base of time. a Infrasound time series; b average amplitude of the three frequency bands of the infrasound signal; c running spectrum of the infrasound signal; Line time of first detection based on infrasound data
The event detection based on the single sensor system was at 1882 s which is at 15:05:32. The peak infrasound pressure measured by this system was approximately 350 mPa. Looking at the diagram of the frequency bands (Fig. 9b) or at the running spectrum (Fig. 9c), the maximum amplitudes of the infrasound signal can be identified between 2 and 7 Hz.
4.2 Avalanche on the 16.04.2015 in Ischgl
The avalanche on the 16.04.2015 was also a natural avalanche. This avalanche was detected by the radar at 10:44:56 and by the infrasound detection system at 10:46:00. The time difference is on one hand an inherent property of the detection systems because the radar can detect avalanches also at a small size at the start, but the infrasound amplitudes emitted at the start of an avalanche are not large enough for a detection. So the avalanches have to become a certain size to emit a detectable infrasound signal and this has to fulfil the detection criteria for the detection time \(T_{\text {det}}\). On the other hand, the time difference can also be produced due to an inexact time synchronization of the two detection systems. Figure 10 shows a series of pictures taken from a camera triggered by the infrasound detection system which was located at the position of the avalanche radar, and Fig. 11 shows the recorded infrasound signals. The avalanche was a medium-sized wet-snow avalanche.

Avalanche on the 16.04.2015 at Ischgl. Pictures taken at time intervals of \({\sim }5\,\hbox {s}\)

Infrasound data of an avalanche monitored at Ischgl on 16.04.2015. Signals are represented with a common base of time. a Infrasound time series; b average amplitude of the three frequency bands of the infrasound signal; c running spectrum of the infrasound signal; Line time of first detection based on infrasound data
The maximum amplitudes of the infrasound signal were approximately 300 mPa, and the duration of the avalanche was according to the infrasound signal 140 s. From the infrasound signal, it seems that this avalanche also occurred in two stages. Looking at the picture series, however, we could also assume that the low amplitude between the two peaks in the signal could have been produced by damping of the infrasound signal due to the shape of the avalanche path. Maybe during the passing of a channel in the upper part of the avalanche path the infrasound produced by the avalanche is shadowed by this channel which could result in a lower registered amplitude during that time. Since similar phenomenon can be observed for the most registered avalanche infrasound signals at Ischgl, this seems a reasonable assumption.
4.3 Avalanche on the 02.02.2015 in Ischgl
The third avalanche presented here is an artificial released avalanche which occurred on the 02.02.2015 at 16:15. This avalanche was larger than the other two, with a deposit area close to the road. Seven explosions were registered by the infrasound system in the hour when the avalanche was detected, whereas the explosion which triggered this avalanche was registered at 16:14:55 (1616 s). The avalanche was detected by the radar at 16:15:53 and by the AMM-Detection system at 16:17:01 (1742 s). The sequence at Fig. 12 shows the process of the avalanche, and Fig. 13 presents the infrasound signals produce by this avalanche.

Avalanche on the 02.02.2015 at Ischgl. Pictures taken at time intervals of \({\sim }4\,\hbox {s}\)
The maximum amplitudes of this avalanche were around 400 mPa, and the duration identified by the infrasound signal was approximately 95 s. The detection based on the infrasound signal was very late, because of the presence of wind which produced a high background signal in the 0–1 frequency band. This example shows how wind noise can effects the detection probability and the importance of wind protection for the infrasound system.

Infrasound data of an avalanche monitored at Ischgl on 02.02.2015. Signals are represented with a common base of time. a Infrasound time series; b average amplitude of the three frequency bands of the infrasound signal; c running spectrum of the infrasound signal; Line time of first detection based on infrasound data
4.4 Avalanche at Silvretta Montafon on the 03.03.2015
This avalanche was triggered by one of the avalanche towers at 07:30:12 on the 03.03.2015. It was the largest avalanche which occurred in the season 2014/2015, and so it was possible to detect this avalanche by the infrasound detection system. An overview of the avalanche path and the deposit is shown in the photo taken some days later (Fig. 14). The avalanche towers and the place of the detection system are also indicated in Fig. 14.

Picture of the deposit zone (red line) of the avalanche at 03.03.2015 and position of avalanche towers (the left three of five) and the single sensor detection system

Infrasound data of an avalanche monitored at Silvretta Montafon on the 03.03.2015. Signals are represented with a common base of time. a Infrasound time series; b average amplitude of the three frequency bands of the infrasound signal; c running spectrum of the infrasound signal; Line time of first detection based on infrasound
The explosion triggering the artificial avalanche could be identified at second 3303 of the infrasound recording (Fig. 15), and the event is than detected by the detection algorithm 19 s later at second 3322. At the infrasound spectrum, a duration of the avalanche of 15 s can be identified (form 3310 to 3325 s). The maximum infrasonic amplitude was about 100 mP which is three to fore times smaller than the avalanches detected at Ischgl, although the distance avalanche path—detection system was much shorter.
5 Results and discussion
5.1 Comparison of the three different detection systems at Ischgl
Table 2 shows an overview of the avalanches which occurred at the different avalanche paths at Ischgl from 2013 to 2016. It listens the detections for the radar, the infrasound array and the single sensor detection system AMM-detection.
The list shows that in the season 2013/2014 the single sensor system detected the most avalanches but also registered the most false alarms (six false alarms and seven detections). Four of the avalanches detected by this system can not be clearly identified as avalanche (event 09.01.2014, 03.02.2014, 09.02.2014, and 14.02.2014). Four avalanches detected by the infrasound array have not been detected by the single sensor system and the radar could of course only detect the three artificial released avalanches on 26.01.2014 which were in the observed area of the radar.
In the season 2014/2015, the infrasound array was not installed any more, so only the radar and the single sensor system could be compared. The radar detected six avalanches, while the infrasound system could only detect three of them and could not identify the smaller artificial released avalanches. One event detected by the single sensor system could not be clearly identified as avalanche (18.01.2015). In this season, only one false alarm was registered by the single sensor system. The winter 2015/2016 was the most snow less winter, so only few small avalanches occurred, whereby most of them was released artificially. The avalanches detected at 05.01.2016, 14.01.2016, and 18.01.2016 by the single sensor system could not be clearly identified but might be small artificial released avalanches not in the range of the radar. Two false alarms occurred at the single sensor system in this season, and two of the avalanches identified by the radar could not be detected by the single sensor system because of the wind. So might a better wind protection could increase the detection probability. Due to technical problems, the last event (06.03.2016) detected by the avalanche radar was not registered at the single sensor system. All avalanche detections listed for the single sensor system in Table 2 were detections of Level 1. Only the five larger sized avalanches on 29.01.2014, 02.02.2015, 03.04.2015, 16.04.2015, and 01.02.2016 were also Level 2-detections, while for Level 2 only one false alarm (25.01.2016) occurred during all three seasons.
Table 3 shows the number of detections of the single sensor system for different settings for the detection algorithm summed up for all three seasons. A decrease in the limit for the amplitudes (for Level 1) of 20% to 8 mPa results in a high increase in false alarms (+5), while only one avalanche is detected additionally. On the other hand, an increase in the limit for the amplitudes of 20% to 12 mPa shows a high decrease in the number of detected events. This shows that for the test site Ischgl a limit for the amplitudes of 10 mPa works best. Since every test site has specific conditions like background noise, distance avalanche path—system set-up, or wind protection the algorithm parameters might have to be adapted for every application to get the best rate between detections and false alarms.
The tests of the three different avalanche detection systems at the test site Ischgl enable a comparison of the performance as well as their advantages and disadvantages which have to be considered for future applications.
So the avalanche radar enabled detections of even small avalanches with a high reliability, but it is restricted to normally one avalanche path per antenna (depending on the beam width of the antenna and the topography). So a radar system can be chosen when the avalanche path is well known and the place of installation offers a direct sight contact to this avalanche path. If the radar system is properly parameterized it will be able to detect even small slides without hardly any false alarms. The infrasound detection systems are not restricted to a certain avalanche path, and their requirements to the installation sites are only a protection from wind (like in a forest), and there should be no sound barriers between system and avalanche path like mountain ridges. The avalanches have to reach a certain size to be detectable for infrasound systems, so it was not able to detect smaller slides in the starting zone. The parameterization of the infrasound systems was done according to the background noise and has a significant influence on the number of false alarms (especially for the single sensor system) and the detection probability. The array system has a lower false alarm rate and offers the possibility for a detection of the direction of the infrasound source and therefore a detected avalanche can usually be assigned to a certain avalanche path. But the installation effort is much higher than for the single sensor system, since the array set-up needs an area of \({\sim }1\) ha. Compared to the other methods, the single sensor system has the lowest cost, which is around fore times lower than for the infrasound array and more than 20 times lower than for the avalanche radar. First tests of replacing the Chaparral infrasound sensor by a standard electret-microphone show promising results and might further reduce the cost of the system by a factor of ten. So if the information of the signal direction is not necessary and there is not enough space for an array installation, or a cheap and easy to install system is needed, the new single sensor system offers a good solution.
5.2 Discussion of the single infrasound sensor system at Silvretta Montafon
Although there were frequent avalanches released, the avalanche at the 03.03.2015 was the only event which could be detected by the single infrasound sensor system at the test site Silvretta Montafon. That suggests that the system is only able to detect large events in a noisy alpine environment (high wind noise and noise from cable car, ski lift, and snow groomer, etc.) which makes it impossible to use lower thresholds for the detection algorithm. The avalanche was only detected by the system which was installed inside the technique camber for the snow cannon, so an additional protection from wind is necessary at installations in high-alpine environment.
In the season 2014/2015, a lot of small avalanches were released by small explosives (\({\sim }30\)) in the monitored area and only six avalanches were triggered by the avalanche towers. Only the example above could be detected by the system, while three false alarms were registered at the system in the camber and one false alarm was registered by the system outside. Since all this false alarms occurred on one day this might be produced by construction work near the snow cannon. So the system installed at Silvretta Montafon worked without serious false alarms, but it was only able to detect larger avalanches.
6 Conclusions and outlook
This paper presents an overview of different methods for avalanche detection and their application at the test site Ischgl in Tyrol. Since the three presented systems were installed close together during the same time period their performance could be easily compared and evaluated.
The radar technology offers an accurate and reliable method for avalanche detection and is also able to detect smaller avalanches if it is well parameterized. The main restrictions of the radar technology are the limited observation area of normally one avalanche path and the radar’s higher cost compared to the infrasound systems. The evaluation of the infrasound array showed the high potential for detecting larger sized avalanches from all directions. The array offers the possibility to assign the detection to a certain avalanche path. The newly designed single infrasound sensor system was able to detect larger sized avalanches with high reliability, and also the false alarm rate was in an acceptable range. So while it offered no information about the direction of the avalanche, the biggest advantage of the single infrasound sensor system was clearly its low cost and easy installability.
Overall, every method shows promising results in detecting avalanches, but every system has its advantages as well as disadvantages, so an accurate discussion of the requirements will be necessary in advance for every particular application.
References
Bedard AJ (1989) Detection of avalanches using atmospheric infrasound. In: Proceedings: western snow conference, Fort Collins, CO
Bedard AJ (1994) An evaluation of atmospheric infrasound for monitoring avalanches. In: Proceedings: 7th international symposium on acoustic sensing and associated techniques of the atmosphere and oceans, Boulder, CO
Chritin V, Rossi M, Bolognesi R (1996) Acoustic detection system for operational avalanche forecasting. In: Proceeding of international snow science workshop, Banff, Alberta, pp 129–1336
Firstov P, Sukhanov L, Pergement V, Rodionovskiy M (1992) Acoustic and seismic signal from snow avalanches, transactions (Doklady) of the U.S.S.R. Acad Sci Earth Sci Sect 312:67–71
Kogelnig A, Suriñach E, Vilajosana I, Hübl J, Sovilla B, Hiller M, Dufour F (2011) On the complementariness of infrasound and seismic sensors for monitoring snow avalanches. Nat Hazards Earth Syst Sci 11:2355–2370
Kogelnig A (2012) Development of acoustic monitoring for alpine mass movements. PhD Thesis, University of Natural Resources and Life Sciences (BOKU), Vienna, Institute of Mountain Risk Engineering
Kogelnig A, Ulivieri G, Marchetti E, Wyssen S (2013) Infrasound detection of avalanches, a new approach on managing avalanche risks. In: Proceedings: international snow science workshop grenoble—Chamonix Mont-Blanc
Koschuch R, Jocham P, Hübl J (2015) One year use of high-frequency RADAR technology in alpine mass movement monitoring: principles and performance for torrential activities. In: Engineering geology for society and territory-volume 3, 1st edn, chap 14. pp 69–72. doi:10.1007/978-3-319-09054-2_14
Marchetti E, Ripepe M, Poggi P (2009) Low-cost differential pressure transducers used to investigate low-frequency volcano infrasound. In: Infrasound technology workshop 2009, Brasilia
Marchetti E, Ripepe M, Ulivieri G, Kogelnig A (2015) Infrasound array criteria for automatic detection and front velocity estimation of snow avalanches: towards a real-time early-warning system. Nat Hazards Earth Syst Sci 15:2545–2555
Naugolnykh K, Bedard A (2001) A model of the avalanche infrasound radiation. In: Proceedings of the 24th Canadian Symposium of Remote Sensing. pp 871–872
Pilger C, Bittner M (2009) Infrasound from tropospheric sources: impact on mesopause temperature? J Atmos Solar Terr Phys 71:816–822
Rabiner LR, Schafer RW, Rader CM (1969) The chirp z-transform algorithm and its application. Bell Syst Tech J 48:1249–1292. doi:10.1002/j.1538-7305.1969.tb04268.x
Ripepe M, Marchetti E (2002) Array tracking of infrasonic sources at Stromboli volcano. Geophys Res Lett 29:2076. doi:10.1029/2002GL015452
Schimmel A, Hübl J (2013a) Automatic detection of avalanches using infrasound and seismic signals. In: Naaim-Bouvet F, Durand Y, Lambert, R (eds) Proceedings of ISSW 2013. pp 904–908
Schimmel A, Hübl J (2013b) Development of a debris flow warning system based on a combination of infrasound and seismic signals. In: Rickenmann D, Laronne JB, Turowski JM, Vericat D (eds) Abstracts. pp 98–99
Schimmel A, Hübl J (2015) Approach for an early warning system for debris flow based on acoustic signals. In: Lollino G. et al (ed) Engineering geology for society and territory. vol 3. pp 55–58. doi:10.1007/978-3-319-09054-2_11
Schimmel A, Hübl J (2016) Automatic detection of debris flows and debris floods based on a combination of infrasond and seismic signals. Landslides 13:1181–1196. doi:10.1007/s10346-015-0640-z
Scott ED, Lance C (2002) Infrasonic monitoring of avalanche activity. In: Proceedings: international snow science workshop. Penticton, British Columbia
Scott ED (2004) Results of recent infrasound avalanche monitoring studies. In: Proceedings: international snow science workshop, Jackson Hole, Wyoming
Scott ED (2006) Practical implementation of avalanche infrasound monitoring technology for operational utilization near Teton Pass Wyoming. In: Proceedings: international snow science workshop
Scott E, Hayward C, Kubichek R, Hamann J, Comey R, Pierre J, Mendenhall T (2007) Single and multiple sensor identification of avalanche generated infrasound. Cold Reg Sci Technol 47:159–170
Sommerfeld RA (1977) Preliminary observations of acoustic emissions preceding avalanches. J Glaciol 19(81):399–409
Sommerfeld RA, Gubler H (1983) Snow avalanches and acoustic emissions. Ann Glaciol 4:271–276 (International Glaciology Society)
Thüring MS, Van Herwijnen A, Schweizer J (2015) Robust snow avalanche detection using supervised machine learning with infrasonic sensor arrays. Cold Reg Sci Technol 111:60–66
Ulivieri G, Marchetti E, Ripepe M, Chiambretti I, De Rosa G, Segor V (2011) Monitoring snow avalanches in Northwestern Italian Alps using an infrasound array. Cold Reg Sci Technol 69:177–183
Ulivieri G, Marchetti E, Ripepe M, Chiambretti I, Segor V (2012) Infrasonic monitoring of snow avalanches in the alps. In: Proceedings of international snow science workshop 2012, Anchorage, Alaska. pp 723–728
Acknowledgements
Open access funding provided by University of Natural Resources and Life Sciences Vienna (BOKU). We thank A. Kogelnig for the data of the Infrasound array IDA. Further we thank the Silvretta Montafon GmbH, especially Martin Oberhammer and Daniel Hug for their support in the field and the observation data of avalanches released in the test area. A. Schimmel was financed by the FFG-Bridge Project “Automatic detection of alpine mass movements" (No. 836474). Funding was provided by Österreichische Forschungsförderungsgesellschaft.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Schimmel, A., Hübl, J., Koschuch, R. et al. Automatic detection of avalanches: evaluation of three different approaches. Nat Hazards 87, 83–102 (2017). https://doi.org/10.1007/s11069-017-2754-1
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11069-017-2754-1