
Abstract
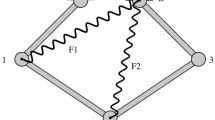
Sensitivity analysis computes the derivatives of general cost functions that depend on the system solution with respect to parameters or initial conditions. This work develops adjoint sensitivity analysis for hybrid multibody dynamic systems. The adjoint sensitivity is commonly referred to as backward propagation. Hybrid systems are characterized by trajectories that are piecewise continuous in time, with finitely-many discontinuities being caused by events such as elastic/inelastic impacts or sudden changes in constraints. The corresponding direct and adjoint sensitivity variables are also discontinuous at the time of events. The framework discussed herein uses a jump sensitivity matrix to relate the jump conditions for the direct and adjoint sensitivities before and after the time event and provides analytical jump equations for the adjoint variables. The theoretical framework for sensitivities for hybrid systems is verified on a five-bar mechanism with non-smooth contacts.





Similar content being viewed by others
References
Corner, S., Sandu, C., Sandu, A.: Modeling and sensitivity analysis methodology for hybrid dynamical system. Nonlinear Anal. Hybrid Syst. 31, 19–40 (2019). https://doi.org/10.1016/j.nahs.2018.07.003.
Bernardo, M., Budd, C., Champneys, A.R., Kowalczyk, P.: Piecewise-Smooth Dynamical Systems: Theory and Applications, vol. 163. Springer, London (2008)
Ballard, P.: The dynamics of discrete mechanical systems with perfect unilateral constraints. Arch. Ration. Mech. Anal. 154(3), 199–274 (2000). https://doi.org/10.1007/s002050000105.
Pace, A.M., Burden, S.A.: Piecewise-differentiable trajectory outcomes in mechanical systems subject to unilateral constraints. In: HSCC’17, pp. 243–252 (2017). https://doi.org/10.1145/3049797.3049807
Zhu, Y., Dopico, D., Sandu, C., Sandu, A.: Dynamic response optimization of complex multibody systems in a penalty formulation using adjoint sensitivity. J. Comput. Nonlinear Dyn. 10(3), 031009 (2015). https://doi.org/10.1115/1.4029601
Pauw, D.J.W.D., Vanrolleghem, P.A.: Avoiding the finite difference sensitivity analysis deathtrap by using the complex-step derivative approximation technique
Sandu, A., Daescu, D.N., Carmichael, G.R.: Direct and adjoint sensitivity analysis of chemical kinetic systems with KPP: Part I—Theory and software tools. Atmos. Environ. 37(36), 5083–5096 (2003). https://doi.org/10.1016/j.atmosenv.2003.08.019
Hamann, P., Mehrmann, V.: Numerical solution of hybrid systems of differential-algebraic equations. Comput. Methods Appl. Mech. Eng. 197, 693–705 (2008). https://doi.org/10.1016/j.cma.2007.09.002
Mehrmann, V., Wunderlich, L.: Hybrid systems of differential-algebraic equations—analysis and numerical solution. J. Process Control 19, 1218–1228 (2009). https://doi.org/10.1016/j.jprocont.2009.05.002
Cao, Y., Li, S., Petzold, L., Serban, R.: Adjoint sensitivity analysis for differential-algebraic equations: the adjoint DAE system and its numerical solution. SIAM J. Sci. Comput. 24, 1076–1089 (2003). https://doi.org/10.1137/S1064827501380630
Petzold, L., Li, S., Cao, Y., Serban, R.: Sensitivity analysis of differential-algebraic equations and partial differential equations. Comput. Chem. Eng. 30, 1553–1559 (2006). https://doi.org/10.1016/j.compchemeng.2006.05.015
Serban, R., Recuero, A.: Sensitivity analysis for hybrid systems and systems with memory. J. Comput. Nonlinear Dyn. 14, 091006 (2019). https://doi.org/10.1115/1.4044028
Barton, P.I., Allgor, R.J., Feehery, W.F., Galán, S.: Dynamic optimization in a discontinuous world. Ind. Eng. Chem. Res. 37(3), 966–981 (1998). https://doi.org/10.1021/ie970738y
Galán, S., Feehery, W.F., Barton, P.I.: Parametric sensitivity functions for hybrid discrete/continuous systems. Appl. Numer. Math. 31(1), 17–47 (1999). https://doi.org/10.1016/S0168-9274(98)00125-1
Barton, P.I., Lee, C.K.: Modeling, simulation, sensitivity analysis, and optimization of hybrid systems. ACM Trans. Model. Comput. Simul. 12(4), 256–289 (2002). https://doi.org/10.1145/643120.643122
Tolsma, J.E., Barton, P.I.: Hidden discontinuities and parametric sensitivity calculations. SIAM J. Sci. Comput. 23(6), 1861–1874 (2002). https://doi.org/10.1137/S106482750037281X
Rozenvasser, E.: General sensitivity equations of discontinuous systems. Avtom. Telemeh. 3, 52–56 (1967)
Saccon, A., van de Wouw, N., Nijmeijer, H.: Sensitivity analysis of hybrid systems with state jumps with application to trajectory tracking. In: 53rd IEEE Conference on Decision and Control, pp. 3065–3070 (2014). https://doi.org/10.1109/CDC.2014.7039861
Hiskens, I.A., Alseddiqui, J.: Sensitivity, approximation, and uncertainty in power system dynamic simulation. IEEE Trans. Power Syst. 21(4), 1808–1820 (2006). https://doi.org/10.1109/TPWRS.2006.882460
Hiskens, I.A., Pai, M.A.: Trajectory sensitivity analysis of hybrid systems. IEEE Trans. Circuits Syst. I, Fundam. Theory Appl. 47(2), 204–220 (2000). https://doi.org/10.1109/81.828574
Taringoo, F., Caines, P.: On the geometry of switching manifolds for autonomous hybrid systems. IFAC Proc. Vol. 43(12), 35–40 (2010). https://doi.org/10.3182/20100830-3-DE-4013.00008
Backer, W.: Jump conditions for sensitivity coefficients. In: Radanović, L. (ed.) Sensitivity Methods in Control Theory (Symp. Dubrovnik 1964), pp. 168–175 (1964)
Stewart, D.E., Anitescu, M.: Optimal control of systems with discontinuous differential equations. Numer. Math. 114(4), 653–695 (2010). https://doi.org/10.1007/s00211-009-0262-2
Taringoo, F., Caines, P.E.: The sensitivity of hybrid systems optimal cost functions with respect to switching manifold parameters. In: Majumdar, R., Tabuada, P. (eds.) Hybrid Systems: Computation and Control, pp. 475–479. Springer, Berlin (2009)
Zhang, H., Abhyankar, S., Constantinescu, E., Anitescu, M.: Discrete adjoint sensitivity analysis of hybrid dynamical systems with switching. IEEE Trans. Circuits Syst. I, Regul. Pap. 64, 13 (2017). https://doi.org/10.1109/TCSI.2017.2651683
Biegler, L., Campbell, S., Mehrmann, V.: DAEs, control, and optimization. In: Control and Optimization with Differential-Algebraic Constraints, pp. 1–16 (2012). https://doi.org/10.1137/9781611972252.ch1
Corner, S.: Modeling, sensitivity analysis, and optimization of hybrid, constrained mechanical systems. Ph.D. thesis, Virginia Polytechnic Institute and State University (2018)
Bajo, E., de Jalón, J.G., Serna, M.A.: A modified Lagrangian formulation for the dynamic analysis of constrained mechanical systems. Comput. Methods Appl. Mech. Eng. 71, 183–195 (1988). https://doi.org/10.1016/0045-7825(88)90085-0
Dopico, D., Sandu, A., Sandu, C., Zhu, Y.: Sensitivity analysis of multibody dynamic systems modeled by ODEs and DAEs. In: Terze, Z. (ed.) Multibody Dynamics. Computational Methods in Applied Sciences, vol. 35 (2014). https://doi.org/10.1007/978-3-319-07260-9_1
Zhu, Y.: Sensitivity analysis and optimization of multibody systems. Ph.D. thesis, Virginia Tech (2014)
Dopico, D., Sandu, A., Zhu, Y., Sandu, C.: Direct and adjoint sensitivity analysis of ordinary differential equation multibody formulations. J. Comput. Nonlinear Dyn. 10(1), 011012 (2014). https://doi.org/10.1115/1.4026492
Zhu, Y., Dopico, D., Sandu, A., Sandu, C.: Mbsvt. A library for the simulation and optimization of multibody systems [online] (2014) [cited January 2015]
Zhu, Y., Dopico, D., Sandu, C., Sandu, A.: Dynamic response optimization of complex multibody systems in a penalty formulation using adjoint sensitivity. ASME J. Comput. Nonlinear Dyn., Special Issue on Multibody Dynamics for Vehicle Systems 10(3), 031009 (2015). https://doi.org/10.1115/1.4029601. Paper no. CND-14-1268, May 1, 2015
Kolathaya, S., Ames, A.D.: Parameter to state stability of control Lyapunov functions for hybrid system models of robots. Nonlinear Anal. Hybrid Syst. (2016). https://doi.org/10.1016/j.nahs.2016.09.003
Schaffer, A.S.: On the adjoint formulation of design sensitivity analysis of multibody dynamics. Ph.D. thesis, The University of Iowa (2005)
Acknowledgements
This project has been partially funded by the European Union Horizon 2020 Framework Program, Marie Skłodowska Curie actions, under grant agreement no. 645736, Project EVE, Innovative Engineering of Ground Vehicles with integrated Active Chassis Systems. It was also supported in part by awards NSF DMS–1419003, NSF CCF–1613905, NSF ACI–1709727, AFOSR DDDAS 15RT1037, by the Computational Science Laboratory.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendices
Appendix A: Calculation of partial derivatives used in sensitivity analyses
Remark 5
The expressions \({{f}_{q}^{\text{eom}}}\), \({{f}_{v}^{\text{eom}}}\), and \({{f}_{{\rho }_{i}} ^{\text{eom}}}\) denote the partial derivatives of \({{f}^{\text{eom}}}\) with respect to the subscripted variables. The partial derivatives \(\partial {{f}^{\text{eom}}}/\partial \zeta \) are obtained by differentiating \({{f}^{\text{eom}}}\) with respect to \(\zeta \in \{{q},{v},{\rho }\}\):
Remark 6
The expressions \(\tilde{{g}}_{q}\), \(\tilde{{g}}_{v}\), and \(\tilde{{g}}_{{\rho }_{i}}\) denote the partial derivatives of \(\tilde{{g}}\) with respect to the subscripted variables. The partial derivatives \(\partial \tilde{{g}}/\partial \zeta \) are obtained by differentiating (1) with respect to \(\zeta \in \{{q},{v},{\rho }\}\):
which leads to
Remark 7
Similarly, the expressions \(\tilde{w}_{q}\), \(\tilde{w}_{v}\), and \(\tilde{w}_{{\rho }_{i}}\) denote the partial derivatives of \(\tilde{w}\) with respect to the subscripted variables. The partial derivatives \(\partial \tilde{w}/\partial \zeta \) are obtained by differentiating \(w\) with respect to \(\zeta \in \{{q},{v},{\rho }\}\):
Appendix B: Adjoint of the algebraic Lagrangian coefficient
Methods to compute the adjoint of an index-1 DAE available in the literature [3, 29, 35] use the following approach. Define the Lagrangian using the multipliers \(\mu ^{Q} , \mu ^{V} , \mu ^{\Gamma }\) that correspond to the constraints posed by the index-1 DAE equations (33) as
We rearrange Eq. (69) as follows:
The adjoint variables \(\lambda ^{Q} , \lambda ^{V} , \lambda ^{\Gamma }\) defined in this paper, and the adjoint variables \(\mu ^{Q} , \mu ^{V} , \mu ^{\Gamma }\) used in the literature (69), are related by the following matrix multiplication:
The adjoint DAE equations and boundary conditions in the “\(\mu \) formulation” [3, 29, 35] can be derived from the equations and boundary conditions in the “\(\lambda \) formulation” discussed in this paper, and vice-versa.
Rights and permissions
About this article

Cite this article
Corner, S., Sandu, A. & Sandu, C. Adjoint sensitivity analysis of hybrid multibody dynamical systems. Multibody Syst Dyn 49, 395–420 (2020). https://doi.org/10.1007/s11044-020-09726-0
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11044-020-09726-0