
Abstract
This paper extends the model reduction method by the operator projection to the one-dimensional special relativistic Boltzmann equation. The derivation of arbitrary order globally hyperbolic moment system is built on our careful study of two families of the complicate Grad type orthogonal polynomials depending on a parameter. We derive their recurrence relations, calculate their derivatives with respect to the independent variable and parameter respectively, and study their zeros and coefficient matrices in the recurrence formulas. Some properties of the moment system are also proved. They include the eigenvalues and their bound as well as eigenvectors, hyperbolicity, characteristic fields, linear stability, and Lorentz covariance. A semi-implicit numerical scheme is presented to solve a Cauchy problem of our hyperbolic moment system in order to verify the convergence behavior of the moment method. The results show that the solutions of our hyperbolic moment system converge to the solution of the special relativistic Boltzmann equation as the order of the hyperbolic moment system increases.





Similar content being viewed by others

References
Anderson, J.L.: Relativistic Boltzmann theory and Grad method of moments. In: Carmeli, M., Fickler, S.I., Witten, L. (eds.) Relativity, pp. 109–124. Springer, Berlin (1970)
Anderson, J.L.: Relativistic Grad polynomials. J. Math. Phys. 15, 1116–1119 (1974)
Anderson, J.L., Witting, H.R.: A relativistic relaxation-time model for the Boltzmann equation. Physica 74, 466–488 (1974)
Au, J.D., Torrilhon, M., Weiss, W.: The shock tube study in extended thermodynamics. Phys. Fluids 13, 2423–2432 (2001)
Cai, Z., Fan, Y., Li, R.: Globally hyperbolic regularization of Grad’s moment system in one dimensional space. Commun. Math. Sci. 11, 547–571 (2013)
Cai, Z., Fan, Y., Li, R.: Globally hyperbolic regularization of Grad’s moment system. Commun. Pure Appl. Math. 67, 464–518 (2014)
Cai, Z., Fan, Y., Li, R.: A framework on moment model reduction for kinetic equation. SIAM J. Appl. Math. 75, 2001–2023 (2014)
Cai, Z., Li, R.: Numerical regularized moment method of arbitrary order for Boltzmann-BGK equation. SIAM J. Sci. Comput. 32, 2875–2907 (2010)
Cai, Z., Li, R., Wang, Y.: Numerical regularized moment method for high Mach number flow. Commun. Comput. Phys. 11, 1415–1438 (2012)
Cercignani, C.: The Boltzmann Equation and Its Applications. Springer, Berlin (1988)
Cercignani, C., Kremer, G.M.: The Relativistic Boltzmann Equation: Theory and Applications. Birkhauser, Berlin (2002)
Chapman, S., Cowling, T.G.: The Mathematical Theory of Non-uniform Gases, 3rd edn. Cambridge University Press, Cambridge (1991)
Denicol, G.S., Niemi, H., Molnár, E., Rischke, D.H.: Derivation of transient relativistic fluid dynamics from the Boltzmann equation. Phys. Rev. D 85, 114047 (2012)
Denicol, G.S., Kodama, T., Koide, T., Mota, P.: Stability and causality in relativistic dissipative hydrodynamics. J. Phys. G Nucl. Part. Phys. 35, 115102 (2008)
Di, Y., Fan, Y., Li, R., Zheng, L.: Linear stability of hyperbolic moment models for Boltzmann equation. arXiv:1609.03669 (2016)
Eckart, C.: The thermodynamics of irreversible processes. III. Relativistic theory of the simple fluid. Phys. Rev. 58, 919–924 (1940)
Einstein, A.: Relativity: The Special and the General Theory. Three Rivers Press, New York (1995)
Fan, Y., Koellermeier, J., Li, J., Li, R., Torrilhon, M.: Model reduction of kinetic equations by operator projection. J. Stat. Phys. 162, 457–486 (2016)
Florkowski, W., Jaiswal, A., Maksymiuk, E., Ryblewski, R., Strickland, M.: Relativistic quantum transport coefficients for second-order viscous hydrodynamics. Phys. Rev. C 91, 054907 (2015)
Garcia-Perciante, A.L., Sandoval-Villalbazob, A., Garcia-Colin, L.S.: Generalized relativistic Chapman–Enskog solution of the Boltzmann equation. Phys. A 21, 5073–5079 (2008)
Grad, H.: On the kinetic theory of rarefied gases. Commun. Pure Appl. Math. 2, 331–407 (1949)
Grad, H.: Note on \(N\)-dimensional Hermite polynomials. Commun. Pure Appl. Math. 2, 325–330 (1949)
Groot, S.R.D., Leeuwen, W.A.V., Weert, C.G.V.: Relativistic Kinetic Theory: Principles and Applications. North-Holland Press, New York (1980)
Hiscock, W.A., Lindblom, L.: Stability and causality in dissipative relativistic fluids. Ann. Phys. 151, 466–496 (1983)
Hiscock, W.A., Lindblom, L.: Generic instabilities in first-order dissipative relativistic fluid theories. Phys. Rev. D 31, 725–733 (1985)
Hiscock, W.A., Lindblom, L.: Linear plane waves in dissipative relativistic fluids. Phys. Rev. D 35, 3723–3732 (1987)
Hiscock, W.A., Lindblom, L.: Nonlinear pathologies in relativistic heat-conducting fluid theories. Phys. Lett. A 131, 509–513 (1988)
Hiscock, W.A., Olson, T.S.: Effects of frame choice on nonlinear dynamics in relativistic heat-conducting fluid theories. Phys. Lett. A 141, 125–130 (1989)
Israel, W.: Relativistic kinetic theory of a simple gas. J. Math. Phys. 4, 1163–1181 (1963)
Israel, W., Stewart, J.M.: Thermodynamics of nonstationary and transient effects in a relativistic gas. Phys. Lett. A 58, 213–215 (1976)
Israel, W., Stewart, J.M.: Transient relativistic thermodynamics and kinetic theory. Ann. Phys. 118, 341–372 (1979)
Israel, W., Stewart, J.M.: On transient relativistic thermodynamics and kinetic theory II. Proc. R. Soc. Lond. A 365, 43–52 (1979)
Jaiswal, A.: Relativistic third-order dissipative fluid dynamics from kinetic theory. Phys. Rev. C 88, 021903(R) (2013)
Jüttner, F.: Das Maxwellsche gesetz der geschwindigkeitsverteilung in der relativtheorie. Ann. Physik und Chemie 339, 856–882 (1911)
Koellermeier, J., Torrilhon, M.: Hyperbolic moment equations using quadrature based projection methods. AIP Conf. Proc. 1628, 626–633 (2014)
Koellermeier, J., Schaerer, R., Torrilhon, M.: A framework for hyperbolic approximation of kinetic equations using quadrature-based projection methods. Kinet. Relat. Models 7, 531–549 (2014)
Kranyš, M.: Kinetic derivation of nonstationary general relativistic thermodynamics. Nuovo Cim. 8B, 417–441 (1972)
Landau, L.D., Lifshitz, E.M.: Fluid Mechanics, 2nd edn. Pergamon Press, New York (1987)
Lichnerowicz, A., Marrot, R.: Propriétés statistiques des ensembles de particules en relativité restreite. C. R. Acad. Sci. Paris 210, 759–761 (1940)
Marle, C.: Modèle cinétique pour l’établissement des lois de la conduction de la chaleur et de la viscosité en theorié de la relativité. C.R. Acad. Sci. Paris 260, 6539–6541 (1965)
Mieussens, L.: Discrete velocity model and implicit scheme for the BGK equation of rarefied gas dynamics. Math. Models Methods Appl. Sci. 10, 1121–1149 (2000)
Rhebergen, S., Bokhove, O., van der Vegt, J.J.W.: Discontinuous Galerkin finite element methods for hyperbolic nonconservative partial differential equations. J. Comput. Phys. 227, 1887–1922 (2008)
Shen, J., Tang, T., Wang, L.: Spectral Methods: Algorithms, Analysis and Applications. Springer, Berlin (2011)
Stewart, J.M.: On transient relativistic thermodynamics and kinetic theory. Proc. R. Soc. Lond. A 357, 59–75 (1977)
Struchtrup, H.: Projected moments in relativistic kinetic theory. Phys. A 253, 555–593 (1998)
Acknowledgements
This work was partially supported by the Special Project on High-performance Computing under the National Key R&D Program (No. 2016YFB0200603), Science Challenge Project (No. JCKY2016212A502), and the National Natural Science Foundation of China (Nos. 91330205, 91630310, 11421101).
Author information
Authors and Affiliations
Corresponding author
Appendices
Appendix 1: Proofs in Section 2
1.1 Proof of Theorem 2.1
Proof
For the nonnegative distribution f(x, p, t), which is not identically zero, using (2.3) gives
which implies the first inequality in (2.22).
Using the definition of \(\Delta ^{\alpha \beta }\) in (2.6) and the tensor decomposition of \(T^{\alpha \beta }\) in (2.5) gives (2.23), which is a quadratic equation with respect to u. The first inequality in (2.22) tells us that (2.23) has two different solutions whose product is equal to \({c^{2}}\), while one of them with a smaller absolute value is (2.24).
Using further (2.3) gives
i.e. the second inequality in (2.22), and then using the tensor decomposition of \(N^\alpha \) in (2.4) gives
Moreover, using the second identity in (2.17) and (2.3) can give (2.26).
The inequality \({E\ge mc^{2}}\) holds because
and
Thus, it holds
which gives the third inequality in (2.22), and implies that \(G(\theta ^{-1})-\theta >1\) for \(\theta \in (0,+\infty )\).
On the other hand, one has
and
Because
one obtains
which is equivalent to the following inequality
Thus, one has
i.e.
which implies that \(G(\theta ^{-1})-\theta \) is a strictly monotonic function of \(\theta \) in the interval \((0,+\infty )\).
Thus (2.26) has a unique solution in the interval \((0,+\infty )\). The proof is completed. \(\square \)
1.2 Proof of Theorem 2.2
Proof
Under Theorem 2.1, for the nonnegative distribution f(x, p, t), which is not identically zero, one obtains \(\{\rho ,u,\theta \}\) satisfying
Due to the last equations in (2.7) and (2.20), one obtains
which completes the proof. \(\square \)
Appendix 2: Proofs in Section 3
1.1 Proof of Theorem 3.2
Proof
-
(i)
For \(k\le n+2\), taking the inner product with respect to \(\omega ^{(0)}\) between the polynomials \(P_{k}^{(0)}(x;\zeta )\) and \((x^2-1)P_{n}^{(1)}(x;\zeta )\) gives
$$\begin{aligned}&\left( (x^2-1)P_{n}^{(1)},P_{n+2}^{(0)}\right) _{\omega ^{(0)}}=\left( c_{n}^{(1)}x^{n+2},P_{n+2}^{(0)}\right) _{\omega ^{(0)}}= \frac{c_{n}^{(1)}}{c_{n+2}^{(0)}}\left( P_{n+2}^{(0)},P_{n+2}^{(0)}\right) _{\omega ^{(0)}}=r_{n+1},\\&\left( (x^2-1)P_{n}^{(1)},P_{n+1}^{(0)}\right) _{\omega ^{(0)}}\\&\quad = \left( c_{n}^{(1)}\left( x^{n+2}-\sum _{i=1}^{n+2}x_{i,n+2}^{(0)}x^{n+1}+ \left( \sum _{i=1}^{n+2}x_{i,n+2}^{(0)}-\sum _{i=1}^{n}x_{i,n}^{(1)}\right) x^{n+1}\right) ,P_{n+1}^{(0)}\right) _{\omega ^{(0)}}\\&\quad =r_{n+1}\left( P_{n+2}^{(0)},P_{n+1}^{(0)}\right) _{\omega ^{(0)}}+ q_{n}\left( P_{n+1}^{(0)},P_{n+1}^{(0)}\right) _{\omega ^{(0)}}=q_{n},\\&\left( (x^2-1)P_{n}^{(1)},P_{n+1}^{(0)}\right) _{\omega ^{(0)}}\\&\quad =\left( P_{n}^{(1)},c_{n+1}^{(0)} \left( x^{n+1}-\sum _{i=1}^{n+1}x_{i,n+1}^{(1)}x^{n}+ \left( \sum _{i=1}^{n+1}x_{i,n+1}^{(1)}-\sum _{i=1}^{n+1}x_{i,n+1}^{(0)}\right) x^{n}\right) \right) _{\omega ^{(1)}}\\&\quad =p_{n+1}\left( P_{n}^{(1)},P_{n+1}^{(1)}\right) _{\omega ^{(1)}}+\frac{c_{n+1}^{(0)}}{c_{n}^{(1)}}\left( \sum _{i=1}^{n+1}x_{i,n+1}^{(1)}- \sum _{i=1}^{n+1}x_{i,n+1}^{(0)}\right) \left( P_{n}^{(1)},P_{n}^{(1)}\right) _{\omega ^{(1)}}\\&\quad =\frac{c_{n+1}^{(0)}}{c_{n}^{(1)}} \sum _{i=1}^{n+1} \left( x_{i,n+1}^{(1)}-x_{i,n+1}^{(0)}\right) =q_{n}, \\&\left( (x^2-1)P_{n}^{(1)},P_{n}^{(0)}\right) _{\omega ^{(0)}} =\left( P_{n}^{(1)},P_{n}^{(0)}\right) _{\omega ^{(1)}}= \left( P_{n}^{(1)},c_{n}^{(0)}x^{n}\right) _{\omega ^{(1)}}\\&\qquad \qquad \qquad \qquad \qquad \qquad \quad =p_{n}\left( P_{n}^{(1)},P_{n}^{(1)}\right) _{\omega ^{(1)}}= p_{n},\\&\left( (x^2-1)P_{n}^{(1)},P_{k}^{(0)}\right) _{\omega ^{(0)}} =\left( P_{n}^{(1)},P_{k}^{(0)}\right) _{\omega ^{(1)}}=0, \quad k\le n-1, \end{aligned}$$ -
(ii)
Taking the inner product with respect to \(\omega ^{(1)}\) between \(P_{n+1}^{(0)} (x;\zeta )\) and \(P_{k}^{(1)} (x;\zeta )\) with \(k\le n+1\)
$$\begin{aligned} \left( P_{n+1}^{(0)},P_{n+1}^{(1)}\right) _{\omega ^{(1)}}&= \left( c_{n+1}^{(0)}x^{n+1},P_{n+1}^{(1)}\right) _{\omega ^{(1)}} =p_{n+1}\left( P_{n+1}^{(1)},P_{n+1}^{(1)}\right) _{\omega ^{(1)}}=p_{n+1},\\ \left( P_{n+1}^{(0)},P_{n}^{(1)}\right) _{\omega ^{(1)}}&= \left( P_{n+1}^{(0)},(x^2-1)P_{n}^{(1)}\right) _{\omega ^{(0)}}=q_{n}, \\ \left( P_{n+1}^{(0)},P_{n-1}^{(1)}\right) _{\omega ^{(1)}}&=\left( P_{n+1}^{(0)},(x^2-1)P_{n-1}^{(1)}\right) _{\omega ^{(0)}}= r_{n}\left( P_{n+1}^{(0)},P_{n+1}^{(0)}\right) _{\omega ^{(0)}}=r_{n},\\ \left( P_{n+1}^{(0)},P_{k}^{(1)}\right) _{\omega ^{(1)}}&=\left( P_{n+1}^{(0)},(x^2-1)P_{k}^{(1)}\right) _{\omega ^{(0)}}=0, \quad k\le n-2. \end{aligned}$$ -
(iii)
If using (3.6) to eliminate \(P_{n+2}^{(0)}\) and \(P_{n+1}^{(1)}\) in (3.9) and (3.10) respectively, then one obtains
$$\begin{aligned} (x^2-1)P_{n}^{(1)}=\tilde{p}_{n}(x+\tilde{q}_{n})P_{n+1}^{(0)}+\tilde{r}_{n}P_{n}^{(0)},\quad P_{n+1}^{(0)}=\frac{1}{\tilde{\tilde{p}}_{n}}\big (x-\tilde{\tilde{q}}_{n}\big )P_{n}^{(1)}-\frac{a_{n-1}^{(1)}}{a_{n}^{(0)}}\tilde{\tilde{r}}_{n}P_{n-1}^{(1)}, \end{aligned}$$with
$$\begin{aligned} \tilde{p}_{n}= & {} \frac{r_{n+1}}{a_{n+1}^{(0)}}=\frac{c_{n}^{(1)}}{c_{n+1}^{(0)}}=\frac{a_{n}^{(1)}}{p_{n+1}}=\tilde{\tilde{p}}_{n},\\ \tilde{q}_{n}= & {} \frac{1}{\tilde{p}_{n}}q_{n}-b_{n+1}^{(0)}=\sum _{i=1}^{n+1}x_{i,n+1}^{(0)}-\sum _{i=1}^{n}x_{i,n}^{(1)}=b_{n}^{(1)}-\tilde{p}_{n}q_{n}=\tilde{\tilde{q}}_{n},\\ \tilde{r}_{n}= & {} p_{n}-\tilde{p}_{n}a_{n}^{(0)}={p_{n}(1-\tilde{p}_{n}^{2})} =\frac{a_{n}^{(0)}}{a_{n-1}^{(1)}}\left( -r_{n}+\frac{1}{\tilde{p}_{n}}a_{n-1}^{(1)}\right) = \tilde{\tilde{r}}_{n}. \end{aligned}$$The proof is completed.
\(\square \)
1.2 Proof of Theorem 3.3
Proof
With the aid of definition and recurrence relation of the second kind modified Bessel function in (2.18) and (2.19), one has
Taking the partial derivative of both sides of identities
with respect to \(\zeta \) and using (3.8) gives
Thus one has
Because \(\frac{\partial P_{n+1}^{(\ell )}}{\partial \zeta }\) is a polynomial and its degree is not larger than \( n+1\), using (3.3) gives (3.17). The proof is completed. \(\square \)
1.3 Proof of Theorem 3.4
Proof
Similar to the proof of Theorem 3.3, one has
Because the degrees of polynomials \(\frac{\partial P_{n+1}^{(0)}}{\partial x}\) and \((x^2-1)\frac{\partial P_{n}^{(1)}}{\partial x}+xP_{n}^{(1)}\) are not larger than n and \(n+1\), respectively, and
one can calculate the expansion coefficients in (3.3) as follows
and
The proof is completed. \(\square \)
1.4 Proof of Theorem 3.6
Proof
Substituting \(\{x_{i,n+1}^{(0)}\}_{i=1}^{n+1}\) into (3.14) gives
which implies that \(\tilde{r}_{n}\ne 0\). In fact, if assuming \(\tilde{r}_{n}=0\), then the above identity and the fact that \((x_{i,n+1}^{(0)})^2-1>0\) imply \(P_{n}^{(1)}(x_{i,n+1}^{(0)};\zeta )=0\), which contradicts with \(P_{n}^{(1)}\) being a polynomial of degree n.
Using Theorem 3.5 gives
Thus there exists at least one zero of the polynomial \(P_{n}^{(1)}\) in each subinterval \(\left( x_{i,n+1}^{(0)},x_{i+1,n+1}^{(0)}\right) \). The proof is completed. \(\square \)
1.5 Proof of Corollary 1
Proof
It is obvious that
Using Theorems 3.1 and 3.6 gives
which imply \(q_{n}>0\) and \(\tilde{q}_{n}>0\).
Comparing the coefficients of the nth order terms at two sides of (3.14) gives
where \(x_{0,n}^{(1)}=0\).
Combining it with Theorem 3.6 gives \(\tilde{r}_{n}>0\). The proof is completed. \(\square \)
1.6 Proof of Corollary 3
Proof
Taking partial derivative of \(P_{n}^{(\ell )}(x_{i,n}^{(\ell )};\zeta )\) with respect to \(\zeta \) and using Theorem 3.3 gives
Due to Theorem 3.5, one has
Combining them completes the proof. \(\square \)
1.7 Proof of Lemma 1
Proof
According to the definition of \(Q_{2n}(x;\zeta )\) in (3.30), it is not difficult to know that \(Q_{2n}(x;\zeta )\) is an even function and a polynomial of degree 2n.
If taking x in (3.30) as the zero of \(P_{n+1}^{(0)}(x;\zeta )\), i.e. \(x=x_{i,n+1}^{(0)}\), \(i=1,\ldots ,{n+1}\), then one has
Since
using Theorem 3.6 gives
for \(i=1,\ldots ,n\), which implies that there exists at least one zero of \(Q_{2n}(x;\zeta )\) in each subinterval \( (x_{i,n+1}^{(0)},x_{i+1,n+1}^{(0)})\), \(i=1,\ldots ,n\). Because \(Q_{2n}(x;\zeta )\) is an even polynomial of degree 2n, there exists exactly one zero of \(Q_{2n}(x;\zeta )\) in each subinterval \((x_{i,n+1}^{(0)},x_{i+1,n+1}^{(0)})\), \(i=1,\ldots ,n\). The proof is completed. \(\square \)
1.8 Proof of Lemma 2
Proof
According to the definition of \(Q_{2n}(x;\zeta )\) in (3.30), one has
Using Theorem 3.3 gives
Substituting (3.14) and (3.15) into it gives
where
Similarly, using Theorem 3.4 and (3.14)-(3.15) gives
Using Theorem 3.6 gives
for \(i=1,\ldots ,n\), which imply
Thus one has
Using Corollaries 1 and 2, and the above results gives (3.31).
The proof is completed. \(\square \)
1.9 Proof of Lemma 3
Proof
Taking partial derivative of \(Q_{2n}(z_{i,n};\zeta )\) with respect to \(\zeta \) gives
Using Lemma 2 completes the proof. \(\square \)
1.10 Proof of Theorem 3.7
Proof
Obviously, both vectors \(\mathbf {u}_{i,n}\) and \(\mathbf {v}_{i,n}\) defined in (3.35) are not zero at the same time, \(i=\pm 1,\ldots ,\pm n\). The nonzero eigenvalues and eigenvectors of the matrix pair \(\mathbf {A}^{0}_{n}\) and \(\mathbf {A}^{1}_{n}\) in (3.32) and (3.34) can be obtained with the aid of (3.28)-(3.29) and Lemma 1. Using Lemma 3 further gives (3.33).
In the following, let us discuss the eigenvector \(\mathbf {y}_{0,n}\). Multiplying (3.12) by \(P_{n+1}^{(0)}(-x;\zeta )\) gives
Transforming (9.1) by x to \(-x\) and then subtracting it from (9.1) and letting \(x=1\) gives as follows
which is a special case of (3.21) with \( \hat{\lambda } =0\).
The proof is completed. \(\square \)
Appendix 3: Proofs in Section 4
1.1 Proof of Lemma 4
Proof
-
(i)
Due to the definition of E and \(p_{{\langle }1{\rangle }}\), it is obvious that each component of \(\mathbf {\mathcal {P}}_{\infty }[u,\theta ]\) (resp. \(\mathbf {\mathcal {P}}_{M}[u,\theta ]\)) belongs to \(\mathbb {H}^{g^{(0)}_{[u,\theta ]}}\) (resp. \(\mathbb {H}^{g^{(0)}_{[u,\theta ]}}_{M}\)).
-
(ii)
The mathematical induction is used to prove that any element in the space \(\mathbb {H}^{g^{(0)}_{[u,\theta ]}}\) (resp. \(\mathbb {H}^{g^{(0)}_{[u,\theta ]}}_{M}\)) can be expressed as a linear combination of vectors in \(\mathbf {\mathcal {P}}_{\infty }[u,\theta ]\) (resp. \(\mathbf {\mathcal {P}}_{M}[u,\theta ]\)) . For \(M=1\), it is clear to have the linear combination
$$\begin{aligned} p^{\alpha }g^{(0)}_{[u,\theta ]}\overset{(2.9)}{=}&\left( p^{{\langle }\alpha {\rangle }}+U^{\alpha }E\right) g^{(0)}_{[u,\theta ]} \overset{(2.8)}{=} \left( -(U^{0})^{-1}U^{1-\alpha }p_{{\langle }1{\rangle }}+U^{\alpha }E\right) g^{(0)}_{[u,\theta ]}\\ \overset{(3.5)}{=}&-(c_{0}^{(1)})^{-1}U^{1-\alpha }\tilde{P}_{0}^{(1)}[u,\theta ]+ (c_{1}^{(0)})^{-1}U^{\alpha }\tilde{P}_{1}^{(0)}[u,\theta ]\\&+(c_{0}^{(0)})^{-1}U^{\alpha }x_{1,1}^{(0)}\tilde{P}_{0}^{(0)}[u,\theta ], \end{aligned}$$where the decomposition of the particle velocity vector (2.9) has been used. Assume that the linear combination
$$\begin{aligned} p^{\mu _{1}}p^{\mu _{2}}\ldots p^{\mu _{M}}g^{(0)}_{[u,\theta ]}=&\sum _{i=0}^{M}c_{i,0}^{\mu _{1},\ldots ,\mu _{M}}\tilde{P}_{i}^{(0)}[u,\theta ] +\sum _{i=0}^{M-1}c_{i,1}^{\mu _{1},\ldots ,\mu _{M}}\tilde{P}_{i}^{(1)}[u,\theta ],\\&\mu _{i}=0,1, i\in \mathbb {N}, i\le M, \quad c_{i,0}^{\mu _{1},\ldots ,\mu _{M}},c_{i,1}^{\mu _{1},\ldots ,\mu _{M}}\in \mathbb {R}, \end{aligned}$$holds. One has to show that \(p^{\mu _{1}}p^{\mu _{2}}\ldots p^{\mu _{M+1}}g^{(0)}_{[u,\theta ]}\) can be expressed as a linear combination of components of \(\mathbf {\mathcal {P}}_{M+1}[u,\theta ]\). Because
$$\begin{aligned}&p^{\mu _{1}}p^{\mu _{2}}\ldots p^{\mu _{M+1}}g^{(0)}_{[u,\theta ]}\\&=\left( \sum _{i=0}^{M}c_{i,0}^{\mu _{1},\ldots ,\mu _{M}}\tilde{P}_{i}^{(0)}[u,\theta ] +\sum _{i=0}^{M-1}c_{i,1}^{\mu _{1},\ldots ,\mu _{M}}\tilde{P}_{i}^{(1)}[u,\theta ]\right) \\&\times \left( -(U^{0})^{-1}U^{1-\mu _{M+1}}p_{{\langle }1{\rangle }}+U^{\mu _{M+1}}E\right) \\&=\sum _{i=0}^{M}c_{i,0}^{\mu _{1},\ldots ,\mu _{M}}U^{\mu _{M+1}}E\tilde{P}_{i}^{(0)}[u,\theta ] -\sum _{i=0}^{M-1}c_{i,1}^{\mu _{1},\ldots ,\mu _{M}}U^{1-\mu _{M+1}}(E^2-1)P_{i}^{(1)}(E;\zeta )\\&\quad -\sum _{i=0}^{M}c_{i,0}^{\mu _{1},\ldots ,\mu _{M}}(U^{0})^{-1}U^{1-\mu _{M+1}}P_{i}^{(0)}(E;\zeta )p_{{\langle }1{\rangle }}+ \sum _{i=0}^{M-1}c_{i,1}^{\mu _{1},\ldots ,\mu _{M}}U^{\mu _{M+1}}\tilde{P}_{i}^{(1)}[u,\theta ], \end{aligned}$$one has
$$\begin{aligned}&p^{\mu _{1}}p^{\mu _{2}}\ldots p^{\mu _{M+1}}g^{(0)}_{[u,\theta ]}\\&\quad =\sum _{i=0}^{M}c_{i,0}^{\mu _{1},\ldots ,\mu _{M}}U^{\mu _{M+1}} \left( a_{i-1}^{(0)}\tilde{P}_{i-1}^{(0)}[u,\theta ]+b_{i}^{(0)}\tilde{P}_{i}^{(0)}[u,\theta ]+a_{i}^{(0)}\tilde{P}_{i+1}^{(0)}[u,\theta ]\right) \\&\qquad -\sum _{i=0}^{M-1}c_{i,1}^{\mu _{1},\ldots ,\mu _{M}}U^{1-\mu _{M+1}} \left( p_{i}\tilde{P}_{i}^{(0)}[u,\theta ]+q_{i}\tilde{P}_{i+1}^{(0)}[u,\theta ]+r_{i+1}\tilde{P}_{i+2}^{(0)}[u,\theta ]\right) \\&\qquad -\sum _{i=0}^{M}c_{i,0}^{\mu _{1},\ldots ,\mu _{M}}U^{1-\mu _{M+1}} \left( r_{i-1}\tilde{P}_{i-2}^{(1)}[u,\theta ]+q_{i-1}\tilde{P}_{i-1}^{(1)}[u,\theta ]+p_{i}\tilde{P}_{i}^{(1)}[u,\theta ]\right) \\&\qquad +\sum _{i=0}^{M-1}c_{i,1}^{\mu _{1},\ldots ,\mu _{M}}U^{\mu _{M+1}} \left( a_{i-1}^{(1)}\tilde{P}_{i-1}^{(1)}[u,\theta ]+b_{i}^{(1)}\tilde{P}_{i+1}^{(1)}[u,\theta ]+a_{i}^{(1)}\tilde{P}_{i+1}^{(1)}[u,\theta ]\right) \\&\quad =:\sum _{i=0}^{M+1}c_{i,0}^{\mu _{1},\ldots ,\mu _{M+1}}\tilde{P}_{i}^{(0)}[u,\theta ] +\sum _{i=0}^{M}c_{i,1}^{\mu _{1},\ldots ,\mu _{M+1}}\tilde{P}_{i}^{(1)}[u,\theta ]{,} \end{aligned}$$by using the three-term recurrence relations (3.6), (3.9), and (3.10) for the orthogonal polynomials \(\{P_{n}^{(\ell )}(x;\zeta ), \ell =0,1\}\).
-
(iii)
Using (3.1) gives
$$\begin{aligned} {\langle }\tilde{P}_{i}^{(\ell )}[u,\theta ],\tilde{P}_{j}^{(\ell )}[u,\theta ]{\rangle }_{g^{(0)}_{[u,\theta ]}}= \left( P_{i}^{(\ell )},P_{j}^{(\ell )}\right) _{ \omega ^{(\ell )}}=\delta _{i,j},\ \ell =0,1. \end{aligned}$$(10.1)Because of (2.9), one has
$$\begin{aligned} \frac{dp}{p^{0}}=dp_{{\langle }1{\rangle }}\frac{-1+u(U^{0}E)^{-1}p_{{\langle }1{\rangle }}}{-up_{{\langle }1{\rangle }}+U^{0}E}=-\frac{dp_{{\langle }1{\rangle }}}{U^{0}E}, \quad E=\sqrt{\left( (U^{0})^{-1}p_{{\langle }1{\rangle }}\right) ^2+1}. \end{aligned}$$Thus it holds
$$\begin{aligned} \nonumber {\langle }\tilde{P}_{i}^{(0)}[u,\theta ],\tilde{P}_{j}^{(1)}[u,\theta ]{\rangle }_{g^{(0)}_{[u,\theta ]}}=&\int _{\mathbb {R}}g^{(0)}_{[u,\theta ]}P_{i}^{(0)}(E;\zeta )P_{j}^{(1)}(E;\zeta )(U^{0})^{-1}p_{{\langle }1{\rangle }}\frac{dp}{p^{0}}\\ =&-\int _{\mathbb {R}}g^{(0)}_{[u,\theta ]}P_{i}^{(0)}(E;\zeta )P_{j}^{(1)}(E;\zeta )(U^{0})^{-1}p_{{\langle }1{\rangle }}\frac{dp_{{\langle }1{\rangle }}}{U^{0}E}=0. \end{aligned}$$(10.2)Combining (i) and (ii) with (iii) completes the proof.
\(\square \)
1.2 Proof of Lemma 5
Proof
For \(s=t\) and x, it is clear to have
Using the above identities and (4.1) gives
The derivation rule of compound function gives
Combining them and using Theorems 3.1–3.4 complete the proof. \(\square \)
1.3 Proof of Lemma 6
Proof
Using the three-term recurrence relations (3.7), (3.11), and (3.12) gives
where \(\mathbf {e}_{2M+1}^{3}\) is the \((M+1)\)th column of the identity matrix of order \((2M+1)\). Thus one has
Combining them with (2.9) completes the proof. \(\square \)
1.4 Proof of Lemma 7
Proof
It is obvious that \(\Pi _{M}[u,\theta ]\) is a linear bounded operator and \(\Pi _{M}[u,\theta ]f\in \mathbb {H}^{g^{(0)}_{[u,\theta ]}}_{M}\) for all \(f\in \mathbb {H}^{g^{(0)}_{[u,\theta ]}}\).
For all \(f\in \mathbb {H}^{g^{(0)}_{[u,\theta ]}}_{M}\), besides (4.7), by using Lemma 4 one has
Taking respectively the inner product with \(\tilde{P}_{i}^{(0)}[u,\theta ]\) and \(\tilde{P}_{j}^{(1)}[u,\theta ]\) from both sides of the last equation gives
Comparing them with the coefficients in (4.9) shows that \(\tilde{f}_{i}^{0}=f_{i}^{0}\), \(\tilde{f}_{j}^{1}=f_{j}^{1}\),
\(i=0,\ldots , M\), \(j=1,\ldots ,M-1\). The proof is completed. \(\square \)
Appendix 4: Proofs in Section 5
1.1 Proof of Lemma 8
Proof
It is obvious that for \(M=1\), the matrix \(\mathbf {D}_M\) is invertible because
\(\det (\mathbf {D}_M)=\rho \zeta ^2c_0^{(1)}(c_0^{(0)}c_1^{(0)}(1-u^2))^{-1}>0\). For \(M\ge 2\), according to the form of \(\mathbf {D}_M\) in Sect. 4.2, one has
Using \(\Pi >-\rho \theta \) gives
The proof is completed. \(\square \)
1.2 Proof of Theorem 5.1
Proof
Consider the following generalized eigenvalue problem (2nd sense): Find a vector \(\mathbf {r}\) that obeys \(\lambda \mathbf {B}_{M}^{0}\mathbf {r}=\mathbf {B}_{M}^{1}\mathbf {r}\) or \( \lambda \mathbf {M}_{M}^{t}\mathbf {D}_{M}\mathbf {r}=\mathbf {M}_{M}^{x}{\mathbf {D}}_{M}\mathbf {r}\). Thanks to (4.5), this eigenvalue problem is equivalent to
Because Theorem 3.7 tells us that \( \hat{\lambda } _{i,M}\) and \(\mathbf {y}_{i,M}\) satisfy
the scalar \(\lambda _{i,M}\) in (5.1) and vector \(\mathbf {r}_{i,M}\) in (5.2) solve the above generalized eigenvalue problem,
and satisfy
The proof is completed. \(\square \)
1.3 Proof of Lemma 9
Proof
Because \(U^{0}\mathbf {M}_{M}^{t}-U^{1}\mathbf {M}_{M}^{x}=\mathbf {P}_{M}^{p}A_{M}^{0}(\mathbf {P}_{M}^{p})^{T}\) and the permutation matrix \(\mathbf {P}_{M}^{p}\) in (4.6) satisfies \(\mathbf {P}_{M}^{p}(\mathbf {P}_{M}^{p})^{T}=(\mathbf {P}_{M}^{p})^{T}\mathbf {P}_{M}^{p}={\mathbf {I}}\), two matrices \(U^{0}\mathbf {M}_{M}^{t}-U^{1}\mathbf {M}_{M}^{x}\) and \(\mathbf {A}_{M}^{0}\) are similar and thus have the same eigenvalues. The definition of \(\mathbf {A}_{M}^{0}\) in (3.20) tells us that the eigenvalues of \(\mathbf {A}_{M}^{0}\) are the zeros of \(P_{M+1}^{(0)}(x;\zeta )\) and \(P_{M}^{(1)}(x;\zeta )\) which are larger than one [43, Theorem 3.4], so the matrix \(U^{0}\mathbf {M}_{M}^{t}-U^{1}\mathbf {M}_{M}^{x}\) is positive definite.
Theorem 3.7 implies
where \(\rho (\cdot )\) is the spectral radius of the matrix. Then \([{\mathbf {I}}-\left( (U^{0}\mathbf {A}_{M}^{0})^{-\frac{1}{2}}U^{1}\mathbf {A}_{M}^{1}(U^{0}\mathbf {A}_{M}^{0})^{-\frac{1}{2}}\right) \) is positive definite, so the matrix \({\mathbf {M}}_{M}^{t}\) is positive definite. \(\square \)
1.4 Proof of Theorem 5.2
Proof
Lemmas 8 and 9 show that the matrix \(\mathbf {B}_{M}^{0}=\mathbf {M}^{t}_{M}\mathbf {D}_{M}\) is invertible, and Theorem 5.1 implies that \(\mathbf {B}_{M}\) is diagonalizable with real eigenvalues and the spectral radius of \(\mathbf {B}_{M}\) is less than one. The proof is completed. \(\square \)
1.5 Proof of Theorem 5.3
Proof
Because
and \( \mathbf {r}_{i,M}=\mathbf {D}_{M}^{-1}\mathbf {P}_{M}^{p}\left( (\mathbf {u}_{i,M})^{T},(\mathbf {v}_{i,M})^{T}\right) ^{T}\), \(i=-M,\ldots , M\), one has
where \(\tilde{\mathbf {r}}_{i}^{M}=\left( (\mathbf {u}_{i,M}^{(3)})^{T},(\mathbf {v}_{i,M}^{(2)})^{T}\right) ^{T}\), \(\mathbf {u}_{i,M}^{(3)}\) and \(\mathbf {v}_{i,M}^{(2)}\) denote two vectors formed by first three and two components of \(\mathbf {u}_{i,M}\) and \(\mathbf {v}_{i,M}\) respectively, and \(\mathbf {d}_{2}\) and \(\mathbf {d}_{3}\) are the second and third row of \(\mathbf {D}_{2}^{-1}\), specifically
The identity (11.1) always holds, because \( \hat{\lambda } _{0,M}=0\) and \(\mathbf {u}_{0,M}\) and \(\mathbf {v}_{0,M}\) are given in (3.36).
The proof is completed. \(\square \)
1.6 Explanation of Remark 11
In fact, in order to judge by numerical experiments whether the sign of \( \nabla _{\mathbf {W}_{M}}\lambda _{i,M}\cdot \mathbf {r}_{i,M}\) is constant or not, (11.1) should be reformed. For \(i=\pm 1,\pm 2,\ldots ,\pm M\), Theorem 3.7 and (11.1) give
Only a simple case is discussed in the following. As shown in Remark 2, at the local thermodynamic equilibrium, \(\Pi =0\) and \(n^\alpha =0\), thus one has
Using the term
to normalize the above identity and noting that
gives
where \(\hat{g}(z_{i,M};\zeta )\) is defined by
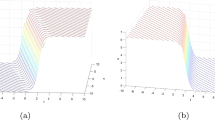
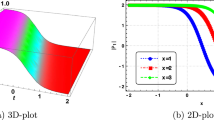
and \(\hat{g}(z_{i,M};\zeta ):=\hat{g}(z_{-i,M};\zeta )\) for \(i\le -1\). It is relatively easy to judge by numerical experiments whether the sign of \(\hat{g}(z_{i,M};\zeta )\) is constant or not. Figure 6 shows plots of \(\hat{g}(z_{1,4};\zeta )\) and \(\hat{g}(z_{1,7};\zeta )\) in terms of \(\zeta \). Similar to the special case of \(M=4\) and 7, our observation in numerical experiments is that the sign of \(\hat{g}(z_{1,M};\zeta )\) is not constant when \(M\ge 4\) so that both \(\lambda _{1,M}\) and \(\lambda _{-1,M}\) characteristic fields are neither linearly degenerate nor genuinely nonlinear when \(M\ge 4\). Such phenomenon is still not found in the case of \(M\le 3\).

Plots of \(\hat{g}(z_{1,M};\zeta )\) in terms of \(\zeta \) for \(M=4\) (left) and 7 (right)
1.7 Proof of Theorem 5.4
Proof
Because the matrix \(\mathbf {D}_M\) in (4.14) at \(\mathbf {W}_{M}=\mathbf {W}_{M}^{(0)}\) can be reformed as follows
and its inverse is given by
as well as
the product of \(\tilde{\mathbf {D}}_{M}^{W}\) and \(\mathbf {D}_{M}^{-1}\) is of the form
where \(\mathbf {D}_{3\times 3}^{11}\) is the \(3\times 3\) subblock of \(\mathbf {D}_{2}\) in the upper left corner, \(\mathbf {D}_{3\times 2}^{12}\) denotes the \(3\times 2\) subblock of \(\mathbf {D}_{2}\) in the upper right corner, and \(\mathbf {D}_{2\times 2}^{22}\) is \(2\times 2\) subblock of \(\mathbf {D}_{2}\) in the bottom right corner. It is obvious that each eigenvalue of \(-\tilde{\mathbf {D}}_{M}^{W}\mathbf {D}_{M}^{-1}\) is non-positive, so does the matrix
The matrix \( U^{0}\mathbf {M}_{M}^{t}-U^{1}\mathbf {M}_{M}^{x} \) can be written as follows
where \(\mathbf {M}_{3\times 3}^{11}\) is the \(3\times 3\) subblock of \(\mathbf {P}_{2}^{p}\mathbf {A}_{2}^{0}(\mathbf {P}_{2}^{p})^{T}\) in the upper left corner, \(\mathbf {M}_{3\times 2}^{12}\) denotes the \(3\times 2\) subblock of \(\mathbf {P}_{2}^{p}\mathbf {A}_{2}^{0}(\mathbf {P}_{2}^{p})^{T}\) in the upper right corner, and \(\mathbf {M}_{2\times 2}^{22}\) is \(2\times 2\) subblock of \(\mathbf {P}_{2}^{p}\mathbf {A}_{2}^{0}(\mathbf {P}_{2}^{p})^{T}\) in the bottom right corner, the rest subblocks form the \((2M-2)\times (2M-2)\) bottom right corner of \(\mathbf {P}_{2}^{p}\mathbf {A}_{M}^{0}(\mathbf {P}_{M}^{p})^{T}\). Thus one has
which is symmetric because \( \mathbf {M}_{3\times 3}^{11}\mathbf {D}_{3\times 2}^{12}\left( \mathbf {D}_{2\times 2}^{22}\right) ^{-1}+ \mathbf {M}_{3\times 2}^{12}=\mathbf {O}_{3\times 2}. \)
On the other hand, because the first three components of \(\mathbf {S}(\mathbf {W}_M)\) are zero, all elements in the first three rows and the first three columns of the matrix
are zero, and the matrix \(\mathbf {Q}_{M}\) is of form
Hence the matrix \(\mathbf {Q}_{M}\) is symmetric. It is obvious that \(\mathbf {Q}_{M}\) is congruent with \(\bar{\mathbf {Q}}_{M}\), so it is negative semi-definite.
Because both matrices \(\mathbf {D}_{M}\) and \(\mathbf {M}_{M}^{t}\) are invertible, and \(\mathbf {M}_{M}^{t}\) is positive definite, (5.4) is equivalent to
where
and
It is obvious that the matrix \(\hat{\mathbf {Q}}_{M}\) is congruent with \(\mathbf {Q}_{M}\) and negative semi-definite, and \(\mathbf {M}_{M}\) is symmetric. Using Lemmas 1 and 2 in [15] completes the proof. \(\square \)
1.8 Proof of Lemma 10
Proof
-
(i)
Under the given Lorentz boost (x direction)
$$\begin{aligned} t'=\gamma (v) (t-vx),\ x'=\gamma (v)(x-vt),\ \gamma (v)=(1-v^2)^{-\frac{1}{2}}, \end{aligned}$$where v is the relative velocity between frames in the x-direction, one has
$$\begin{aligned}&(p^{0})'=\gamma (v)(p^{0}-p^{1}v),\quad (p^{1})'=\gamma (v)(p^{1}-p^{0}v), \\&(U^{0})'=\gamma (v)(U^{0}-U^{1}v),\quad (U^{1})'=\gamma (v)(U^{1}-U^{0}v). \end{aligned}$$Thus one further obtains
$$\begin{aligned} E'= (U^{0})'(p^{0})'-(U^{1})'(p^{1})'=U^{0}p^{0}-U^{1}p^{1}=E, \end{aligned}$$and
$$\begin{aligned} \left( \frac{p_{{\langle }1{\rangle }}}{U^{0}}\right) '=&\frac{-(p^{{\langle }1{\rangle }})'}{(U^{0})'}=-\frac{p^{{\langle }0{\rangle }}-p^{{\langle }1{\rangle }}v}{U^{1}-U^{0}v}=-\frac{(U^{0})^{-1}U^{1}p^{{\langle }1{\rangle }}-p^{{\langle }1{\rangle }}v}{U^{1}-U^{0}v}=\frac{p_{{\langle }1{\rangle }}}{U^{0}}, \\ \left( \frac{dp}{p^{0}}\right) '=&\frac{d(p^{1})'}{(p^{0})'}=\frac{dp^{0}-dp^{1}v}{p^{1}-p^{0}v}=\frac{(p^{0})^{-1}p^{1}dp^{1}-dp^{1}v}{p^{1}-p^{0}v}=\frac{dp}{p^{0}}. \end{aligned}$$Combining them with (4.9) gives that each component of \(\mathbf {f}_{M}\) is Lorentz invariant, so that the last \((2M-4)\) components of \(\mathbf {W}_{M}\) are also Lorentz invariant. From (2.17) and (2.20), it is not difficult to prove that \(\rho \) and \(\theta \) are Lorentz invariant. On the other hand, because
$$\begin{aligned} \tilde{n}^{1}=\int _{\mathbb {R}}\frac{p^{{\langle }1{\rangle }}}{U^{0}}f\frac{dp}{p^{0}}, \end{aligned}$$the quantity \(\tilde{n}^{1}\) is Lorentz invariant. Moreover, one has
$$\begin{aligned} \left( \frac{du}{1-u^2}\right) '=\frac{d(U^{1})'}{(U^{0})'}=\frac{dU^{0}-dU^{1}v}{U^{1}-U^{0}v}=\frac{(U^{0})^{-1}U^{1}dU^{1}-dU^{1}v}{U^{1}-U^{0}v}=\frac{dU^{1}}{U^{0}}=\frac{du}{1-u^2}. \end{aligned}$$Using the above results completes the proof of the first part.
-
(ii)
Because \(\mathbf {A}_{M}^{0}\) and \(\mathbf {A}_{M}^{1}\) only depend on \(\theta \), they are Lorentz invariant. The source term \(\mathbf {S}(\mathbf {W}_{M})\) in (4.21) can be rewritten into
$$\begin{aligned} \mathbf {S}(\mathbf {W}_{M})=-\frac{1}{\tau }\mathbf {P}_{M}^{p}\mathbf {A}_{M}^{0}(\mathbf {P}_{M}^{p})^{T}\left( \mathbf {f}_{M}-\mathbf {f}^{(0)}_{M}\right) , \end{aligned}$$which has been expressed in terms of the Lorentz covariant quantities. In fact, the general source term \(\mathbf {S}(\mathbf {W}_{M})\) in the moment system (4.20) is also Lorentz invariant. The proof is completed.
\(\square \)
1.9 Proof of Theorem 5.5
Proof
From the 3rd step in Sec. 4.2 and Lemma 10, one knows that \(\hat{\mathbf {D}}_{M}=\mathbf {D}_M(\mathbf {D}_{M}^{u})^{-1}\) can be expressed in terms of the Lorentz covariant quantities, so it is Lorentz invariant. Because
and
one has
where the last equal sign is derived by following the proof of Lemma 10. Similarly, one has
Thus it holds
Combining it with Lemma 10 completes the proof. \(\square \)
Appendix 5: Proofs in Section 6
1.1 Proof of Lemma 11
Proof
where
Therefore one has
The proof is completed. \(\square \)
1.2 Proof of Lemma 12
Proof
Using Lemma 7 gives
Because both \({P}_{i}^{(0)}(u_{1},\zeta _{1})f\) and \({P}_{j}^{(1)}(u_{1},\zeta _{1})(U_{0})_{1}^{-1}p_{{\langle }1{\rangle }}f\) belong to the space \(\mathbb {H}_{M}^{f}\), using Lemma 11 completes the proof. \(\square \)
1.3 Proof of Theorem 6.1
Proof
Because Eq. (6.3) is equivalent to
it is unconditionally stable if and only if the modulus of each eigenvalue of the matrix
is not less than one. It is true if the real part of each eigenvalue of the matrix
is non-negative.
In fact, thanks to (6.4), the characteristic polynomial of the upper triangular matrix \( \mathbf {I}-\mathbf {D}_{i,M}^{f_{i}^{(0)*}}\) is explicitly given by
and \(\bar{\mathbf {M}}_{D}^{*}\) is a symmetric matrix and congruent with
which is similar to the matrix \( \mathbf {I}-\mathbf {D}_{i,M}^{f_{i}^{(0)*}}\). Thus the matrix \(\bar{\mathbf {M}}_{D}^{*}\) is positive semi-definite and each eigenvalue of the matrix \( \left( \mathbf {M}_{i,M}^{t*}\right) ^{-1}\bar{\mathbf {M}}_{D}^{*}\) is non-negative because of the relation \( \left( \mathbf {M}_{i,M}^{t*}\right) ^{-1}\bar{\mathbf {M}}_{D}^{*} =\left( \mathbf {M}_{i,M}^{t*}\right) ^{-\frac{1}{2}} \big ( \left( \mathbf {M}_{i,M}^{t*}\right) ^{-\frac{1}{2}} \bar{\mathbf {M}}_{D}^{*} \left( \mathbf {M}_{i,M}^{t*}\right) ^{-\frac{1}{2}}\big ) \left( \mathbf {M}_{i,M}^{t*}\right) ^{\frac{1}{2}}\). The proof is completed. \(\square \)
Rights and permissions
About this article

Cite this article
Kuang, Y., Tang, H. Globally Hyperbolic Moment Model of Arbitrary Order for One-Dimensional Special Relativistic Boltzmann Equation. J Stat Phys 167, 1303–1353 (2017). https://doi.org/10.1007/s10955-017-1773-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10955-017-1773-3