
Abstract
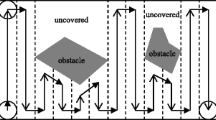
We propose a novel approach to deal with the online complete-coverage task of cleaning robots in unknown workspaces with arbitrarily-shaped obstacles. Our approach is based on the boustrophedon motions, the boundary-following motions, and the Theta* algorithm known as B-Theta*. Under control of B-Theta*, the robot performs a single boustrophedon motion to cover an unvisited region. While performing the boustrophedon motion, if the robot encounters an obstacle with a boundary that has not yet been covered, it switches to the boundary mode to cover portions along the obstacle boundary, and then continues the boustrophedon motion until it detects an ending point. To move to an unvisited region, the robot detects backtracking points based on its accumulated knowledge, and applies an intelligent backtracking mechanism thanks to the proposed Theta* for multi-goals in order to reach the next starting point. Complete coverage is achieved when no starting point exists for a new boustrophedon motion. Computer simulations and experiments on real workspaces show that our proposed B-Theta* is efficient for the complete-coverage task of cleaning robots.
Similar content being viewed by others

References
Acar, E.U., Choset, H., Rizzi, A.A., Atkar, P.N., Hull, D.: Morse decompositions for coverage tasks. Int. J. Robot. Res. 21(4), 331–344 (2002)
Botea, A., Mller, M., Schaeffer, J.: Near optimal hierarchical path-finding. Journal of Game Development 1(1), 7–28 (2004)
Chibin, Z., Xingsong, W., Yong, D.: Complete coverage path planning based on ant colony algorithm. In: Proceedings of the 15Th International Conference on Mechatronics and Machine Vision in Practice, pp. 357–361. Auckland, New-Zealand (2008)
Choset, H.: Coverage of known spaces: the boustrophedon cellular decomposition. Auton. Robot. 9(1), 247–253 (2000)
Choset, H.: Coverage for robotics - a survey of recent results. Ann. Math. Artif. Intell. 31(1–4), 113–126 (2001)
Choset, H., Lynch, K.M., Hutchinson, S., Kantor, G.A., Burgard, W., Kavraki, L.E., Thrun, S.: Principles of Robot Motion: Theory, Algorithms, and Implementations. MIT Press, Boston (2005)
Choset, H., Pignon, P.: Coverage path planning: the boustrophedon cellular decomposition. In: Proceedings of the International Conference on Field and Service Robotics. Canberra, Australia (1997)
Daniel, K., Nash, A., Koenig, S.: Theta*: any-angle path planning on grids. J. Artif. Intell. Res. 39(1), 533–579 (2010)
Dijkstra, E.W.: A note on two problems in connexion with graphs. Numer. Math. 1(1), 269–271 (1959)
Dlouhy, M., Brabec, F., Svestka, P.: A genetic approach to the cleaning path planning problem. In: Proceedings of the 16th European Workshop on Computational Geometry. Eilat, Israel (2000)
Dudek, G., Jenkin, M.: Computational Principles of Mobile Robotics, 2nd edn. Cambridge University (2010)
Esposito, J.M., Barton, O., Koehler, J., Lim, D.: Matlab toolbox for the create robot (2011). www.usna.edu/Users/weapsys/esposito/roomba.matlab/
Gabriely, Y., Rimon, E.: Spanning-tree based coverage of continuous areas by a mobile robot. Ann. Math. Artif. Intell. 31(4), 77–98 (2001)
Gabriely, Y., Rimon, E.: Spiral-STC: an on-line coverage algorithm of grid environments by a mobile robot. In: Proceedings of the IEEE International Conference on Robotics and Automation, pp. 954–960, Washington, DC, USA (2002)
Gonzalez, E., Alvarez, O., Diaz, Y., Parra, C., Bustacara, C.: BSA: a complete coverage algorithm. In: Proceedings of the IEEE International Conference on Robotics and Automation, pp. 2040–2044, Barcelona, Spain (2005)
Gonzalez, E., Aristizbal, P.T., Alarcn, M.A.: Backtracking spiral algorithm: a mobile robot region filling strategy. In: Proceeding of the 2002 International Symposium on Robotics and Automation, pp. 261–266, Toluca, Mexico (2002)
Hart, P.E., Nilsson, N.J., Raphael, B.: A formal basis for the heuristic determination of minimum cost paths. IEEE Transactions on Systems Science and Cybernetics 4(2), 100–107 (1968)
Koenig, S., Liu, Y.: Terrain coverage with ant robots: a simulation study. In: Proceedings of the International Conference on Autonomous Agents, pp. 600–607, Montreal, Quebec, Canada (2001)
Korf, R.E., Reid, M., Edelkamp, S.: Time complexity of iterative-deepening-A*. Artif. Intell. 129(1-2), 199–218 (2001)
Latombe, J.C.: Robot Motion Planning. Kluwer Academic Publishers (1991)
Luo, C., Yang, S.X.: A bioinspired neural network for real-time concurrent map building and complete coverage robot navigation in unknown environments. IEEE Trans. Neural Netw. 19(1), 1279–1298 (2008)
Mannadiar, R., Rekleitis, I.: Optimal coverage of a known arbitrary environment. In: Proceedings of the IEEE International Conference on Robotics and Automation, pp. 5525–5530, Anchorage, Alaska, USA (2010)
Nash, A., Daniel, K., Koenig, S., Felner, A.: Theta*: any-angle path planning on grids. In: Proceedings of the AAAI Conference on Artificial Intelligence, pp. 1177–1183. Vancouver, Canada (2007)
Oh, J.S., Choi, Y.H., Park, J.B., Zheng, Y.F.: Complete coverage navigation of cleaning robots using triangular-cell-based map. IEEE Trans. Ind. Electron. 51(3), 718–726 (2004)
Palleja, T., Tresanchez, M., Teixido, M., Palacin, J.: Modeling floor-cleaning coverage performances of some domestic mobile robots in a reduced scenario. Robot. Auton. Syst. 58(1), 37–45 (2010)
Russel, S.J., Norvig, P.: Artificial Intelligence a Modern Approach, 2nd edn. Pearson Education (2003)
Shivashankar, V., Jain, R., Kuter, U., Nau, D.: Real-time planning for covering an initially-unknown spatial environment. In: Proceedings of the Twenty-Fourth International Florida Artificial Intelligence Research Society Conference, pp. 63–68, Florida, USA (2011)
The iRobot Create Team: iRobot create owners guide (2006). www.irobot.com/hrd_right_rail/create_rr/create_fam/createFam_rr_manuals.html
Viet, H.H., Dang, V.H., Laskar, M.N.U., Chung, T.: BA*: an online complete coverage algorithm for cleaning robots. Appl. Intell. (2012). doi:10.1007/s10489-012-0406-4
Wong, S.: Qualitative Topological Coverage of Unknown Environments by Mobile Robots. PhD dissertation, the University of Auckland, New Zealand (2006)
Wong, S.C., MacDonald, B.A.: A topological coverage algorithm for mobile robots. In: Proceedings of the International Conference on Intelligent Robots and Systems, pp. 1685–1690 (2003)
Yang, S.X., Luo, C.: A neural network approach to complete coverage path planning. IEEE Trans. Syst. Man Cybern. B Cybern. 34(1), 718–724 (2004)
Yap, P.: Grid-based path-finding. Lecture Notes in Artificial Intelligence 2338(1), 44–55 (2002)
Author information
Authors and Affiliations
Corresponding authors
Rights and permissions
About this article

Cite this article
Choi, S., Lee, S., Viet, H.H. et al. B-Theta*: an Efficient Online Coverage Algorithm for Autonomous Cleaning Robots. J Intell Robot Syst 87, 265–290 (2017). https://doi.org/10.1007/s10846-017-0485-x
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10846-017-0485-x